上位机系统Ubuntu 20.04与下位机arduino UNO通讯
目录
- 一、安装arduino IDE
- 1.1安装方法
- 1.1.1终端里命令下载(不推荐)
- 1.1.2官网下载(不推荐)
- 1.1.3论坛下载(不推荐)
- 1.1.4系统应用商店(推荐!)
- 1.2配置项目文件位置
- 1.3测试IDE功能
- 二、配置ros与arduino通讯的库文件
- 2.1安装软件包
- 2.2开启roscore
- 2.3配置库文件位置
- 三、创建一个发布者publisher
- 3.1重新打开arduino IDE
- 3.2编译示例代码
- 3.3运行arduino节点
- 3.4查看arduino节点信息
- 四、创建一个订阅者sublisher
- 3.1重新打开arduino IDE
- 3.2编译示例代码
- 3.3运行arduino节点
- 3.4改变LED状态
- 3.4.1方式一
- 3.4.2方式二
Windows 10 + VMware 16 + Ubuntu 20.04+ Noetic
台式机 + arduino UNO
一、安装arduino IDE
1.1安装方法
1.1.1终端里命令下载(不推荐)
下载的版本太老,是1.0.5的,编译时会报错
sudo apt-get install arduino
报错内容:

1.1.2官网下载(不推荐)
从官网下载: https://www.arduino.cc/,速度很慢
1.1.3论坛下载(不推荐)
不好找Ubuntu版本的IDE安装包
1.1.4系统应用商店(推荐!)
Ubuntu software ——> 弹出snap商店——> 左上角 搜索 arduino
可以看到版本是1.8.19的,可以!下载速度也可以!


1.2配置项目文件位置
打开arduino IDE——>文件——>首选项——>项目文件位置
选择主目录下的一个文件夹,权限高!

1.3测试IDE功能
打开blink示例,进行编译,编译成功后,arduino开发板的小灯一直闪烁说明IDE安装成功

二、配置ros与arduino通讯的库文件
2.1安装软件包
sudo apt-get install ros-noetic-rosserial-arduino
sudo apt-get install ros-noetic-rosserial
2.2开启roscore
打开一个终端,输入:
roscore
2.3配置库文件位置
[PathToYourSketchbookLibraries] 指 项目文件位置
rosrun rosserial_arduino make_libraries.py [PathToYourSketchbookLibraries]
三、创建一个发布者publisher
3.1重新打开arduino IDE
3.2编译示例代码
文件——>示例——> ros_lib ——> HelloWorld
3.3运行arduino节点
IDE右下角显示串口号,我的是 ttyACM0,改成自己的
rosrun rosserial_python serial_node.py /dev/ttyACM0

3.4查看arduino节点信息
示例内容是,arduino作为一个节点以/chatter 为话题向外输出 “hello world!”
用命令行查看话题内容和频率,没有问题!
rostopic echo /chatter
rostopic hz /chatter

四、创建一个订阅者sublisher
3.1重新打开arduino IDE
3.2编译示例代码
文件——>示例——> ros_lib ——> Blink
代码解释: link
#include <ros.h>
#include <std_msgs/Empty.h>ros::NodeHandle nh;void messageCb( const std_msgs::Empty& toggle_msg){digitalWrite(LED_BUILTIN, HIGH-digitalRead(LED_BUILTIN)); // blink the led
}ros::Subscriber<std_msgs::Empty> sub("toggle_led", &messageCb );void setup()
{ pinMode(LED_BUILTIN, OUTPUT);nh.initNode();nh.subscribe(sub);
}void loop()
{ nh.spinOnce();delay(1);
}3.3运行arduino节点
IDE右下角显示串口号,我的是 ttyACM0,改成自己的
rosrun rosserial_python serial_node.py /dev/ttyACM0
3.4改变LED状态
3.4.1方式一
用pub
rostopic pub toggle_led std_msgs/Empty --once3.4.2方式二
设置QT工具箱:使用rqt向话题发布消息:

相关文章:
上位机系统Ubuntu 20.04与下位机arduino UNO通讯
目录一、安装arduino IDE1.1安装方法1.1.1终端里命令下载(不推荐)1.1.2官网下载(不推荐)1.1.3论坛下载(不推荐)1.1.4系统应用商店(推荐!)1.2配置项目文件位置1.3测试IDE功…...

hive面试题
1、什么是Hive Hive是基于Hadoop的一个数据仓库工具,可以将结构化的数据文件映射为一张数据库表,并提供类SQL查询功能(HQL) 2、Hive的意义(最初研发的原因) 避免了去写MapReduce,提供快速开发的…...

【CUDA】《CUDA编程:基础与实践》CUDA加速的关键因素
CUDA事件计时 CUDA提供了一种基于CUDA事件(CUDA event)的计时方式,可用来给一段CUDA代码(可能包含主机代码和设备代码)计时。 对计时器的封装: class CUDATimeCost { public:void start() {elapsed_time_ 0.0;// 初始化cudaEventcheckCudaRuntime(cud…...
——双向循环链表)
数据结构【Golang实现】(四)——双向循环链表
目录0. 定义节点1. IsEmpty()2. Length()3. AddFromHead()4. AddFromTail()5. Insert()6. DeleteHead()7. DeleteTail()8. Remove()9. RemoveByValue()10. Contain()11. Traverse()0. 定义节点 type DLNode struct {Data anyPrev, Next *DLNode }// DoublyLoopLinkedLis…...
【Redis】高可用架构之哨兵模式 - Sentinel
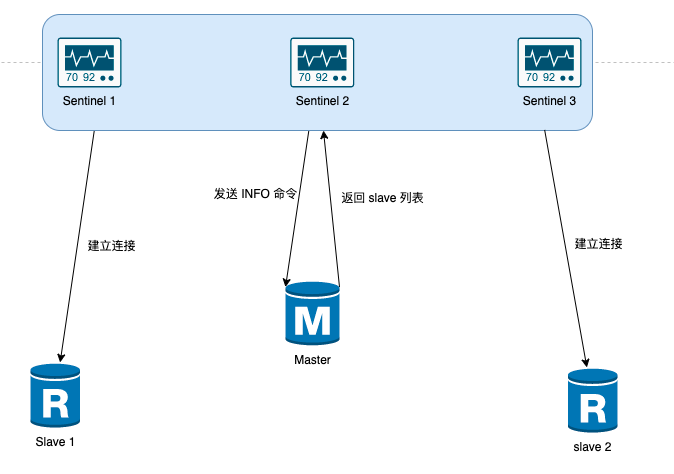
Redis 高可用架构之哨兵模式 - Sentinel1. 前言2. Redis Sentinel 哨兵集群搭建2.1 一主两从2.2 三个哨兵3. Redis Sentinel 原理剖析3.1 什么哨兵模式3.2 哨兵机制的主要任务3.2.1 监控(1)每1s发送一次 PING 命令(2)PING 命令的回…...
图片的美白与美化
博主简介 博主是一名大二学生,主攻人工智能研究。感谢让我们在CSDN相遇,博主致力于在这里分享关于人工智能,c,Python,爬虫等方面知识的分享。 如果有需要的小伙伴可以关注博主,博主会继续更新的,…...
面试官:关于CPU你了解多少?
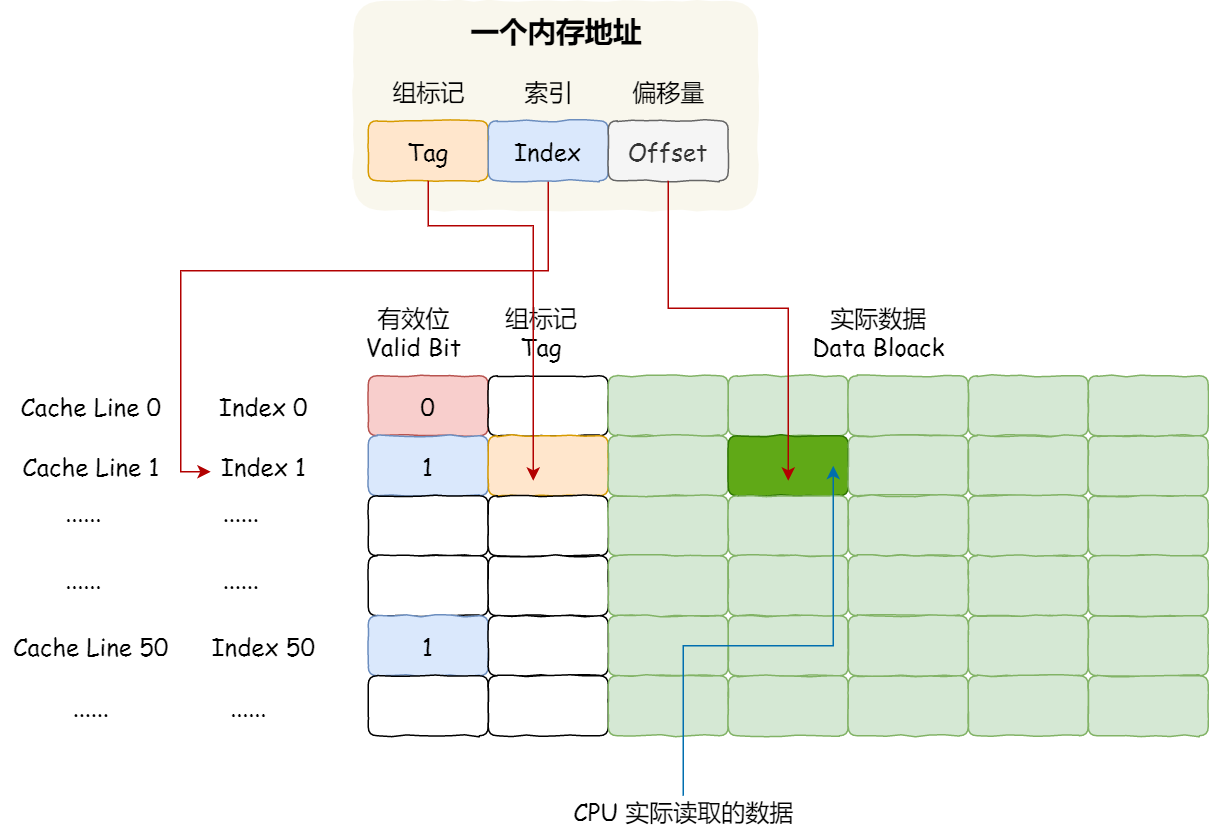
CPU是如何执行程序的? 程序执行的基本过程 第一步,CPU 读取「程序计数器」的值,这个值是指令的内存地址,然后 CPU 的「控制单元」操作「地址总线」指定需要访问的内存地址,接着通知内存设备准备数据,数据准…...

UI自动化测试-Selenium的使用
文章目录 1. 环境搭建1.1 入门示例1.2 元素操作常用方法1.3 浏览器操作常用方法1.4 获取元素信息常用方法1.5 鼠标操作常用方法1.6 键盘操作常用方法1.7 下拉选择框操作2. 元素定位2.1 id定位2.2 name定位2.3 class_name定位2.4 tag_name定位2.5 link_text定位2.6 partail_link…...
嵌入式学习笔记——STM32的USART相关寄存器介绍及其配置
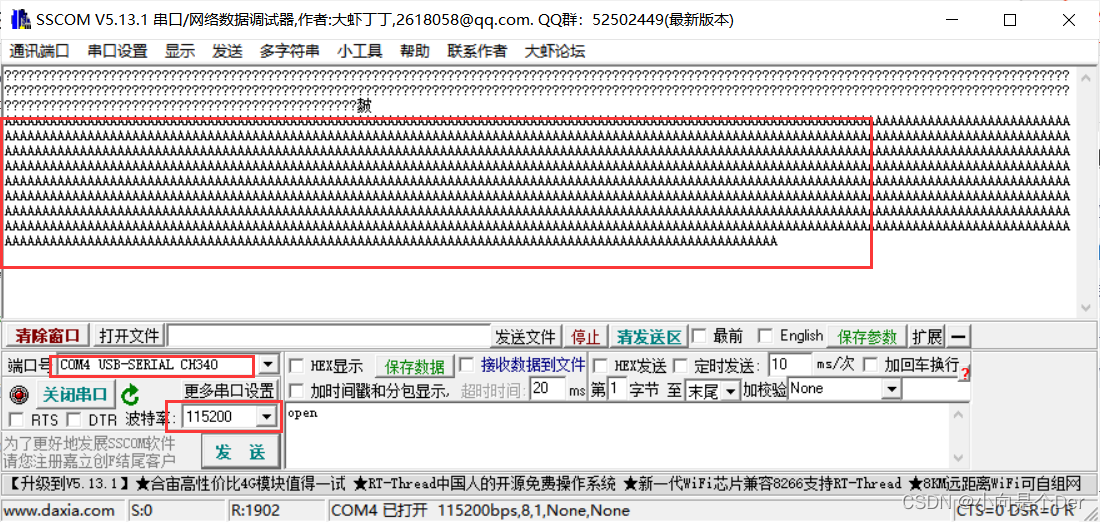
文章目录前言USART的相关寄存器介绍状态寄存器:USARTX->SR具体位代表的含义实际代码数据寄存器 USARTX->DR波特率寄存器 USARTX->BRR控制寄存器 (USART_CR)控制寄存器1(USART_CR1)控制寄存器2(USART_CR2)GPIO…...
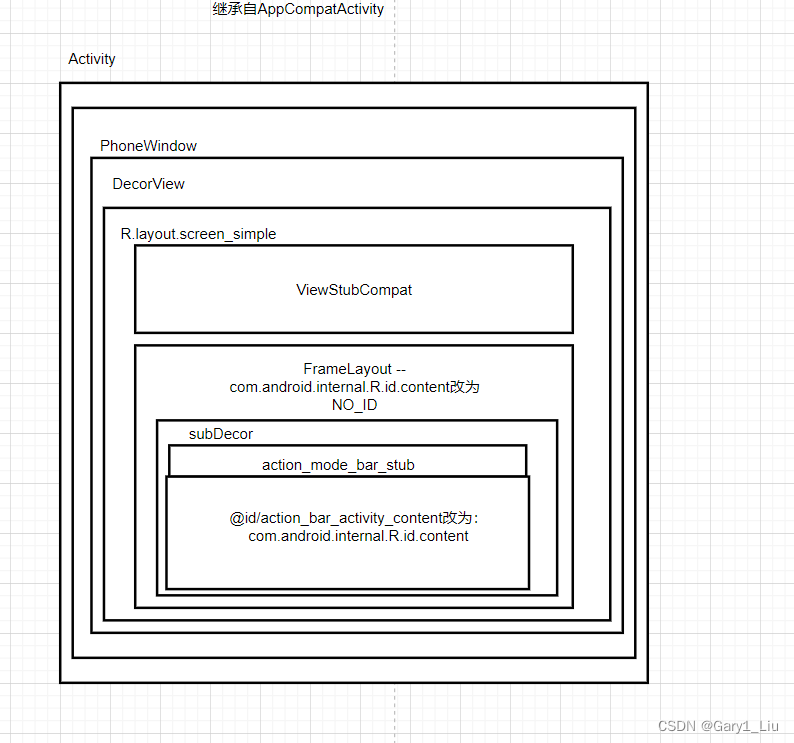
Android setContentView流程分析(一)
对于做Android App的小伙伴来说setContentView这个方法再熟悉不过了,那么有多少小伙伴知道它的调用到底做了多少事情呢?下面就让我们来看看它背后的故事吧? setContentView()方法将分为两节来讲: 第一节:如何获取De…...

doris数据库操作数字遇到的问题
关于doris数据库Apache Doris 是一个基于 MPP 架构的高性能、实时的分析型数据库,以极速易用的特点被人们所熟知,仅需亚秒级响应时间即可返回海量数据下的查询结果,不仅可以支持高并发的点查询场景,也能支持高吞吐的复杂分析场景。…...
3.13文件的IO操作
一.文件1.定义文件一般指的是存储在硬盘上的普通文件形如:txt.jpg.mp4,rar等这些文件在计算机中,文件可能是一个广义的概念,不仅可以包含普通文件,还可以包含目录(也就是文件夹.把目录称为目录文件)在操作系统中,还会用文件来描述一些其他的硬件设备或者软件资源比如网卡,显示器…...
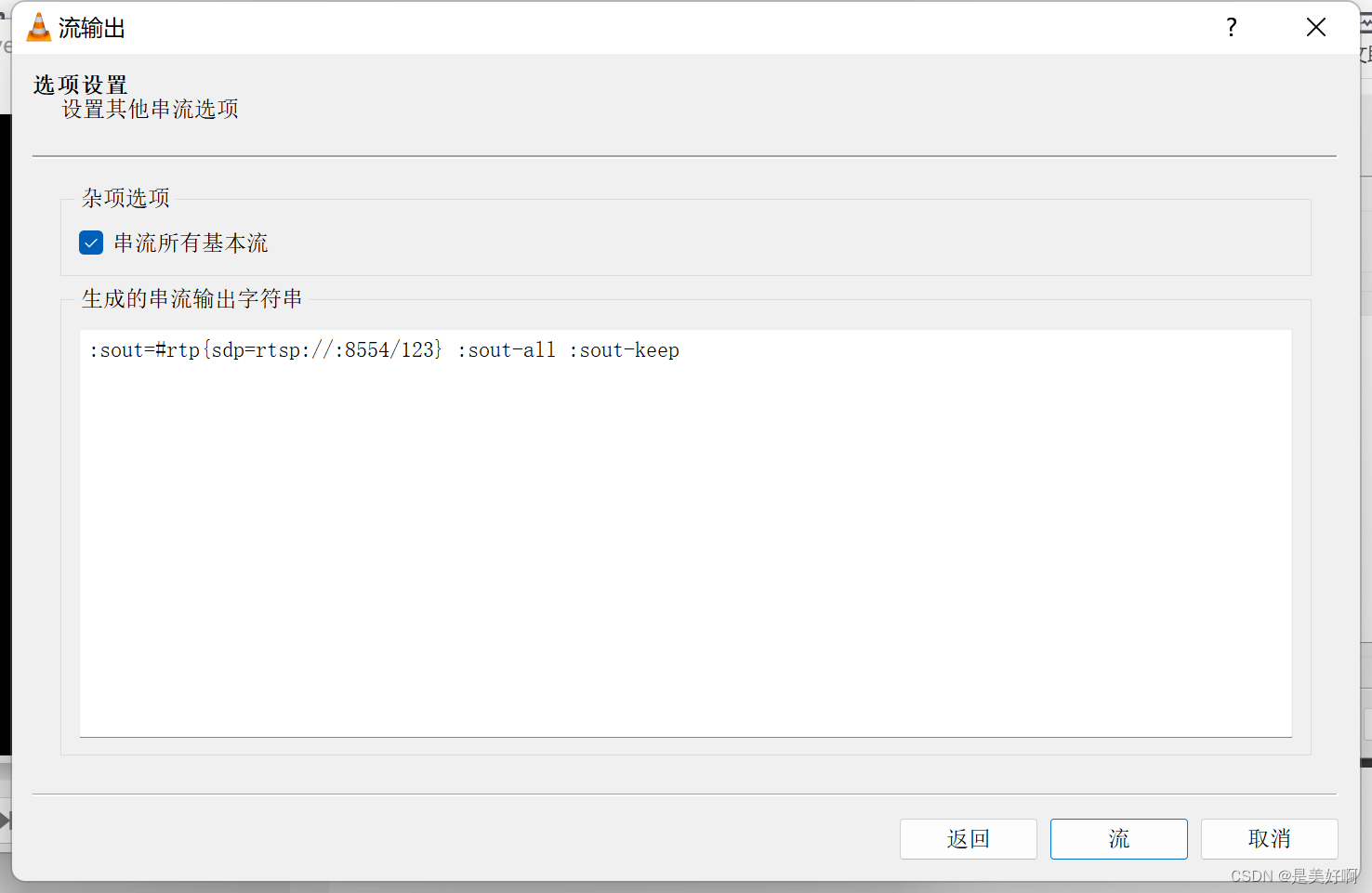
ffmpeg使用
1 下载FFmpeg安装 官网地址:https://www.ffmpeg.org/download.html#build-windows 进入网址,点击下面红框部分 点击下面范围进行下载,下载速度有点慢,等等吧! 下载成功后,解压后,复制bin的路…...
/分区器如何确定)
spark中的并行度(分区数)/分区器如何确定
源头RDD有自己的分区计算逻辑,一般没有分区器,并行度是根据分区算法自动计算的,RDD的compute函数中记录了数据如何而来,如何分区的hadoopRDD,根据XxxinputFormat.getInputSplits()来决定,比如默认的TextInputFormat将文…...

00后女生“云摆摊”两周赚1.5万,实体店转战线上真的能赚钱吗?
最近,山东临沂的00后女生利用小程序在线上“云摆摊”卖水果,两周赚1.5万,引发网友热议。不少人发出质疑的声音:年轻人不要有稳定的工作不做,去摆摊;网上开店成本低,开实体店结果就难说了&#x…...
| 机考必刷)
华为OD机试题 - 最优资源分配(JavaScript)| 机考必刷
更多题库,搜索引擎搜 梦想橡皮擦华为OD 👑👑👑 更多华为OD题库,搜 梦想橡皮擦 华为OD 👑👑👑 更多华为机考题库,搜 梦想橡皮擦华为OD 👑👑👑 华为OD机试题 最近更新的博客使用说明本篇题解:最优资源分配题目输入输出描述备注示例一输入输出说明示例二输入…...

利用python判断字符串是否为回文
1 问题 如何用python判断字符串是否为回文。 2 方法 用两个变量left,right模仿指针(一个指向第一个字符,一个指向最后一个字符),每比对成功一次,left向右移动一位,right向左移动一位,…...
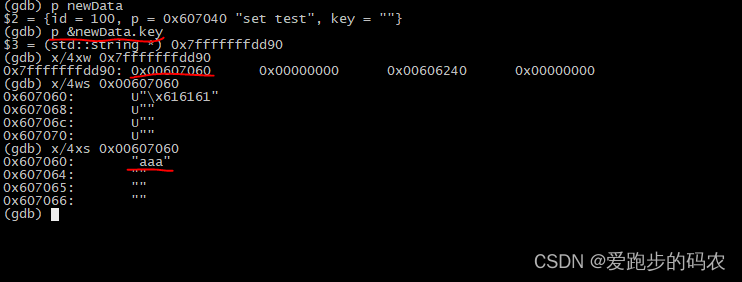
GDB 调用之ptype、set variable
今天在公司的时候,排查一个问题,创建l3 lif 失败,查看各种日志发现是用key去创建的 lif失败了,日志里指示key为空,导致的创建失败。原因为一个结构体比基线的多了一些东西,导致版本不对,既而计算…...
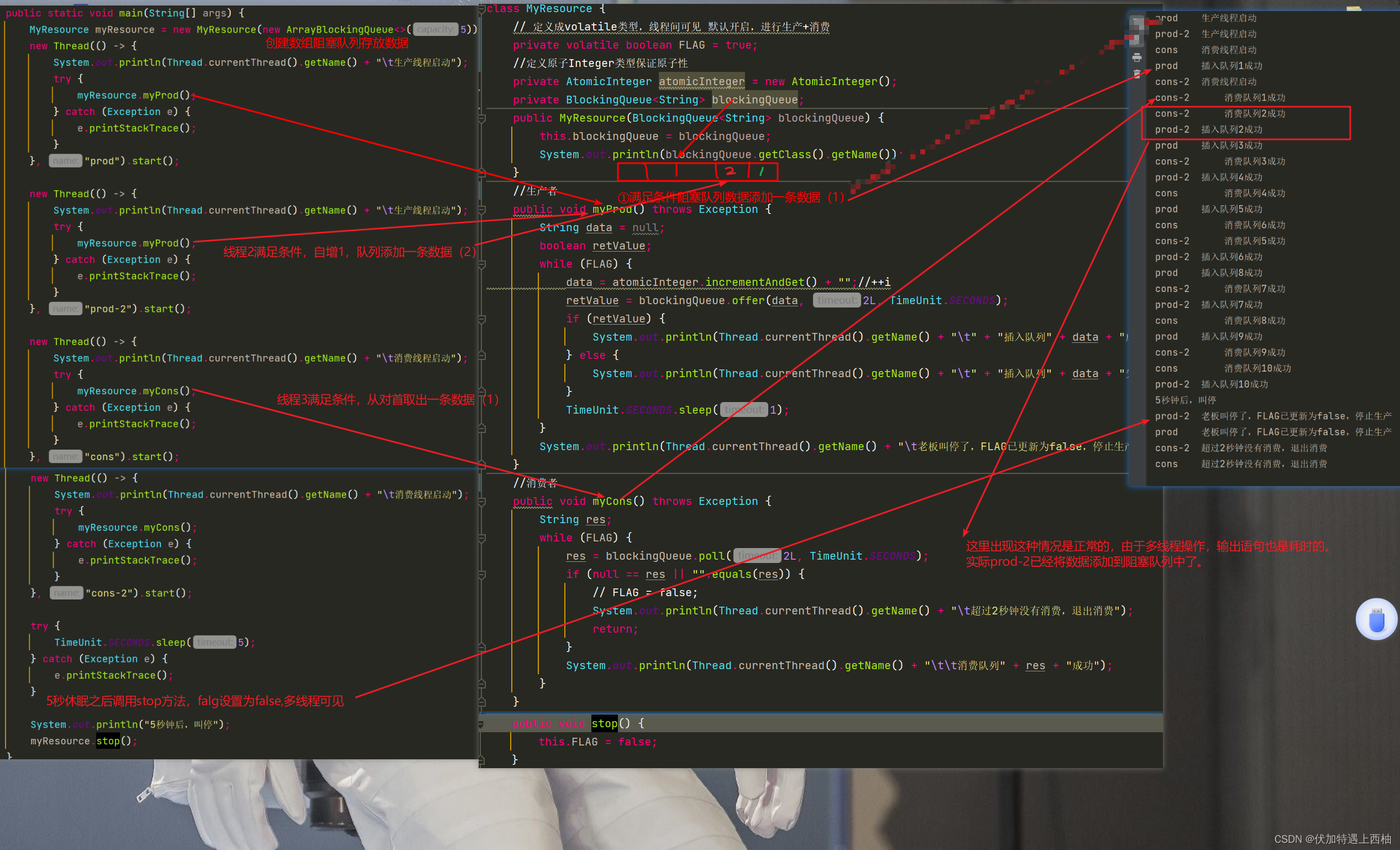
并发编程---阻塞队列(五)
阻塞队列一 阻塞队列1.1.阻塞队列概念1.2.阻塞队列API案例1.2.1. ArrayBlockingQueue1.2.1.1.抛出异常1.2.1.2.返回布尔1.2.1.3.阻塞1.2.1.4.超时1.2.2.SynchronousQueue二 阻塞队列应用---生产者消费者2.1.传统模式案例代码结果案例问题---防止虚假唤醒2.2.⽣产者消费者防⽌虚…...

本科课程【计算机组成原理】实验1 - 输出ABCD程序的生成
大家好,我是【1+1=王】, 热爱java的计算机(人工智能)渣硕研究生在读。 如果你也对java、人工智能等技术感兴趣,欢迎关注,抱团交流进大厂!!! Good better best, never let it rest, until good is better, and better best. 近期会把自己本科阶段的一些课程设计、实验报…...

终极D2DX指南:让《暗黑破坏神2》在现代电脑上焕发新生
终极D2DX指南:让《暗黑破坏神2》在现代电脑上焕发新生 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 还在为经典…...

终极指南:如何快速解决Windows应用程序运行库缺失问题
终极指南:如何快速解决Windows应用程序运行库缺失问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经遇到过这样的情况:下载了…...

代码转图片怎么实现:代码高亮卡片生成方法
最近在做文章后台时,我遇到一个很实际的问题:编辑器里的代码块虽然能正常显示,但要拿去做分享图、封面图或者文档配图时就不太合适了。 一开始我试过手动截图,但这种方式效率低,而且样式不统一。代码只要改一行&#x…...

AI编程助手上下文压缩引擎:降低Token成本60-99%的智能解决方案
1. 项目概述:一个为AI编程工具设计的上下文压缩引擎如果你每天都在用Cursor、Claude Code或者GitHub Copilot这类AI编程助手,那你肯定对“上下文窗口”和“Token消耗”这两个词不陌生。每次你让AI助手“看看这个文件”、“运行一下git status”或者“检查…...

专业级英雄联盟回放分析工具:ROFL-Player完整实战指南
专业级英雄联盟回放分析工具:ROFL-Player完整实战指南 【免费下载链接】ROFL-Player (No longer supported) One stop shop utility for viewing League of Legends replays! 项目地址: https://gitcode.com/gh_mirrors/ro/ROFL-Player ROFL-Player是一款专为…...

当大模型认不出一个具体名字:MiniMax 回答失灵,问题未必只在模型本身
当大模型认不出一个具体名字:MiniMax 回答失灵,问题未必只在模型本身 围绕“为什么 MiniMax 大模型无法识别马嘉祺是谁”的一次能力拆解:真正暴露的,往往是知识覆盖、检索策略与风控边界的耦合问题 直接回答 先给结论。 如果 Mi…...

软工大学生亲测:用 Claude Code 武装自己,从学渣到 offer 收割机
大家好,我是一个既研究过 K 线、又写过几十万行代码的老学姐。最近一个软件工程大三的实习生问我:"师姐,我感觉自己什么都不会,投了 300 份简历,石沉大海……"我当时差点把咖啡喷出来——不是因为他惨&#…...

英雄联盟智能辅助工具Seraphine:三步快速上手的终极指南
英雄联盟智能辅助工具Seraphine:三步快速上手的终极指南 【免费下载链接】Seraphine 英雄联盟战绩查询工具 项目地址: https://gitcode.com/gh_mirrors/se/Seraphine 你是否厌倦了在英雄联盟排位赛中手忙脚乱地查询对手战绩?是否希望有一个智能助…...

Hypha框架深度解析:现代Python异步Web开发与API构建实践
1. 项目概述:Hypha,一个被低估的轻量级Web框架 如果你和我一样,长期在Web后端开发领域摸爬滚打,那么对Flask、FastAPI、Express这些名字一定耳熟能详。它们各有千秋,也各有其“甜蜜点”和“痛点”。最近在GitHub上闲逛…...

别再傻傻分不清!舵机、步进、无刷、永磁同步,这四种电机到底怎么选?
电机选型实战指南:舵机、步进、无刷与永磁同步的黄金法则 在机器人关节调试现场,一位工程师盯着反复抖动的机械臂摇头:"早知道该用无刷电机...";创客空间里,几个学生围着一台失控的3D打印机争论:…...