2024机器人科研/研发领域最新研究方向岗位职责与要求
具身智能工程师
从事具身智能领域的技术研究或产品开发,制定具身智能技术标准,利用大模型技术来提高机器人的智能化水平,研究端云协同的机器人系统框架,并赋能人形/复合等各类形态的机器人。具体内容包括不限于:
1、负责具身世界重建的研发工作;
2、负责多模态数据生成的研发工作;
3、负责面向可泛化机器人任务(抓取、操作、移动等技能)的具身自主训练平台的研发工作;
4、负责多模态具身任务规划大模型的研发工作;
5、负责基于大模型的具身Agent框架的研发工作;
6、参与对具身智能领域的最新研究和技术动态进行洞察与规划;
2、具备扎实的C++或Python编程基础,熟悉Linux开发环境;
3、学习能力强、应变能力强,优秀的沟通能力和协调能力,执行能力强,具备较强的团队合作精神;
4、并满足下列要求之一:
(1)熟悉视觉感知模型、扩散模型、多模态大模型、NLP大模型、操作抓取模型等技术方向之一,熟悉常见的领域开源算法;
(2)熟悉Tensorflow或PyTorch,有AI算法训练或AI系统开发经验者优先;
(3)熟悉ROS,有机器人开发调试经验者优先。
大模型
奖励模型和强化学习模型的泛化性
奖励模型和强化学习模型的自学习
大语言模型的可解释性
大语言模型的真实性
下一代强化学习算法
基于Self Play的大语言模型
机器人算法
1、机器人相关算法的开发和研究工作(感知、定位、操作、交互等),提出和实现最前沿的算法,保持算法在工业界和学术界的领先;
2、推动最新前沿算法在机器人上的应用和扩展。
电机驱动器硬件
1、负责无框电机控制系统的方案设计和硬件实现(器件选型,原理图与PCB设计); 2、负责无框电机调试,梳理测试用例,完成电机性能测试与分析优化; 3、解决产品研发过程中出现的可靠性问题,质量问题,EMC问题,功能以及性能等问题。
2、对无框电机的工作原理、控制方式、性能指标和测试方法等有深入了解; 3、熟练使用Altium Designer,Cadence 等电路设计软件,有独立硬件设计经验者优先; 4、熟悉电机驱动器设计,熟悉MOSFET、栅极驱动和保护设计,可独立完成开发和调试; 5、熟悉电机控制中常用的传感器检测技术和应用,具备力传感器结构设计和制作经验者优先;
机器人抓取规划工程师
1.负责多关节机器人运动学/动力学建模/仿真分析,以及相关机器人的调试和自动调参算法开发;
2.负责机器人离线/在线路径规划和轨迹规划算法开发和优化.冗余控制算法.力控算法.双臂协同算法等开发调试;
3.根据产品开发计划.功能需求完成相关业务功能开发和代码实现,完成实机部署和调试,不断完善和以后化控制系统;
4.负责作业场景中运动规划方案的验证与优化;
5.负责产品实际部署调试优化工作。
3.熟悉数值优化.最优化理论,MPC.WBC.LQR等问题构建及求解者优先
4.具备较强的编程能力(如Linux.C/C++.matlab.python),熟悉常见仿真器(Mujoco.Gazebo.Isaac),熟悉ros/ros2。
熟悉嵌入式硬件开发(TIDSP.ARM.STM32其一),熟悉模数混合电路设计,熟悉各类电力电子器件的驱动方法。
1、负责机器人本体设计开发,包括形态功能、机械机构、电气系统、驱动执行、新材料应用等;
2、负责机器人感知交互技术开发,包括机器视觉、触觉传感器、视触觉信息处理融合、环境状态感知、人机交互协作等;
3、负责机器人控制技术开发,包括系统辨识、状态估计、运动规划、轨迹生成、实时控制、异常检测恢复等;
4、负责前沿机器人AI技术开发,包括但不限于强化学习、深度学习、发育学习、群体智能等;
5、负责新一代机器人仿真、边缘计算、虚实结合等技术的研究与开发。
熟悉设计软件(如Solidworks)、仿真软件(如Adams/Gazebo)或至少一种编程语言(C/C++、Python、Matlab)。
可以加分的: 在IJRR、T-RO、Science Robotics、RSS、ICRA、IROS等相关一流学术期刊或会议上以第一作者发表过文章
机器人工程师
1.定义并开发机器人关键技术,如关节设计、灵巧机械手、电驱动和传动系统、控制系统、机器视觉、边缘计算等;
2.能够结合生产式人工智能技术探索可商业化的机器人系统并能够开发原理样机验证可行性;
3.负责研发、选择机器人系统 如SCARA、Articulated Roboic Arm、RGV、AMR,、Delta 等;
4.熟悉ROS Moveit, Gazebo、Fanuc RoboGuide等开源和商业化创建模拟和离线编程工具及机器人开发环境;
.熟悉ROS Moveit, Gazebo、Fanuc RoboGuide、Siemens Process Simulate 等开源和商业化创建模拟和离线编程工具及高级机器人编程环境,包括DCS。
推动学习类算法(如深度学习、强化学习、模仿学习等)在智能机器人上的应用和拓展,建设下一代智能机器人系统的技术。
1.熟悉机器人运动学与动力学,有良好的数学与建模基础;有机械臂、灵巧手或人形机器人的开发经验;
2.具有现代控制理论或深度学习、强化学习及模仿学习相关领域经验,熟悉常见RL算法如DDPG/A3C/PPO/SAC等,了解VLM、LLM等技术;
参与先进安全性设计分析预研(例如:具身智能和人机交互频繁的情况下的产品安全性设计和分析方法的研究);
方向二:无人机多模态感知融合
1.Lidar、Radar、Vision 多模态前融合算法框架设计和实现,提升目标检测性能和环境语义理解性能;
2.利用无人机环视多模态感知数据,设计并实现 BEV-Transformer 框架,实现环视语义和目标检测跟踪;
3.端到端 occupancy network 设计与实现。
方向三:机器人具身智能中的感知算法
1.设计实现机械抓手与待抓取目标的关键点检测、深度估计以及位姿识别算法。
1.熟悉一种或者多种自动驾驶/机器人感知融合模型,了解视觉SLAM,目标检测与跟踪,行为预测等领域,了解LIDAR、RADAR、摄像头等传感器工作原理,了解除视觉、语音等常见信号的处理和特征提取;
2.熟练使用至少一种深度学习平台,如TensorFlow、PyTorch等,有丰富的模型开发和优化经验,对嵌入式设备上的模型落地有一定经验;
机器人控制算法工程师
1、负责机器人运动控制、力控制、阻抗控制、运动学、动力学等算法开发、仿真和调试;
2、负责机器人控制算法软件实现,与机器人操作系统软件整合;
3、负责机器人控制算法与运动规划算法的软件整合及联调;
4、负责工业机器人、协作机器人等编程与调试;
5、负责实际项目中机器人控制相关算法和软件开发及调试。
任职要求
1、熟悉机器人建模、控制相关理论知识;
2、熟悉控制理论知识,Matlab建模仿真;
3、熟悉常用的机器人控制算法,如PD/PID控制、导纳控制、阻抗控制、计算力矩控制、运动学正逆解、动力学建模等;
4、掌握Python、C /C++ 等至少一种编程语言;
5、熟悉Linux操作系统,命令行、Bash Shell编程等操作;
6、熟悉ROS、MoveIt的优先;
7、有实际机器人产品使用经验者优先,如:四大家族工业机器人产品或UR等协作机器人产品。
1、有从事机器人动力学仿真、参数辨识、运动控制等相关经验;
2、熟练使用主流的机器人仿真环境平台,包含但不限于Issac Sim、MoveIt等,可以独立负责从模型创建和导入、仿真环境搭建、以及运动控制的工作流;
3、熟悉常用的网络通信协议(TCP/IP, UDP, Websocket)和串口通信协议(Modbus RTU/TCP),与外部设备(如PLC)通信协议;
4、熟悉常用的代码管理平台Gitlab,有良好的协同开发习惯。
2、熟悉电机原理、自动控制原理、数字信号处理、系统辨识等理论知识;掌握电机的控制特性、功率特性和负载特性;熟悉伺服电机控制算法(如FOC、SVPWM、、数字滤波器、观测器的原理、设计与实现 ;
3、有伺服电机参数自学习、控制参数自整定、自动增益调整、振动抑制等常见伺服驱动器功能开发经验者优先;
4、熟悉常见MCU,如TI-DSP2000系列、STM32等;熟悉嵌入式汇编,熟练使用嵌入式C编程,有良好的编码习惯,熟悉git版本管理软件的使用;
5、熟悉常见编码器协议,如Biss,Endata等;熟悉常见伺服工业总线,如EtherCAT、Profinet、CAN等; 熟悉标准伺服协议DS402;
基于脑肌电融合的下一 代交互系统的研究
相关文章:

2024机器人科研/研发领域最新研究方向岗位职责与要求
具身智能工程师 从事具身智能领域的技术研究或产品开发,制定具身智能技术标准,利用大模型技术来提高机器人的智能化水平,研究端云协同的机器人系统框架,并赋能人形/复合等各类形态的机器人。具体内容包括不限于: 1、负…...

笔记:Newtonsoft.Json 序列化接口集合
在使用 Newtonsoft.Json 序列化接口集合时,一个常见的挑战是如何处理接口的具体实现,因为接口本身并不包含关于要实例化哪个具体类的信息。为了正确序列化和反序列化接口集合,你需要提供一些额外的信息或使用自定义的转换器来指导 Newtonsoft…...
【Unity设计模式】✨使用 MVC 和 MVP 编程模式
前言 最近在学习Unity游戏设计模式,看到两本比较适合入门的书,一本是unity官方的 《Level up your programming with game programming patterns》 ,另一本是 《游戏编程模式》 这两本书介绍了大部分会使用到的设计模式,因此很值得学习 本…...

CDH安装和配置流程
这份文件是一份关于CDH(Clouderas Distribution Including Apache Hadoop)安装的详细手册,主要内容包括以下几个部分: 1. **前言**: - CDH是基于Apache Hadoop的发行版,由Cloudera公司开发。 - 相比…...
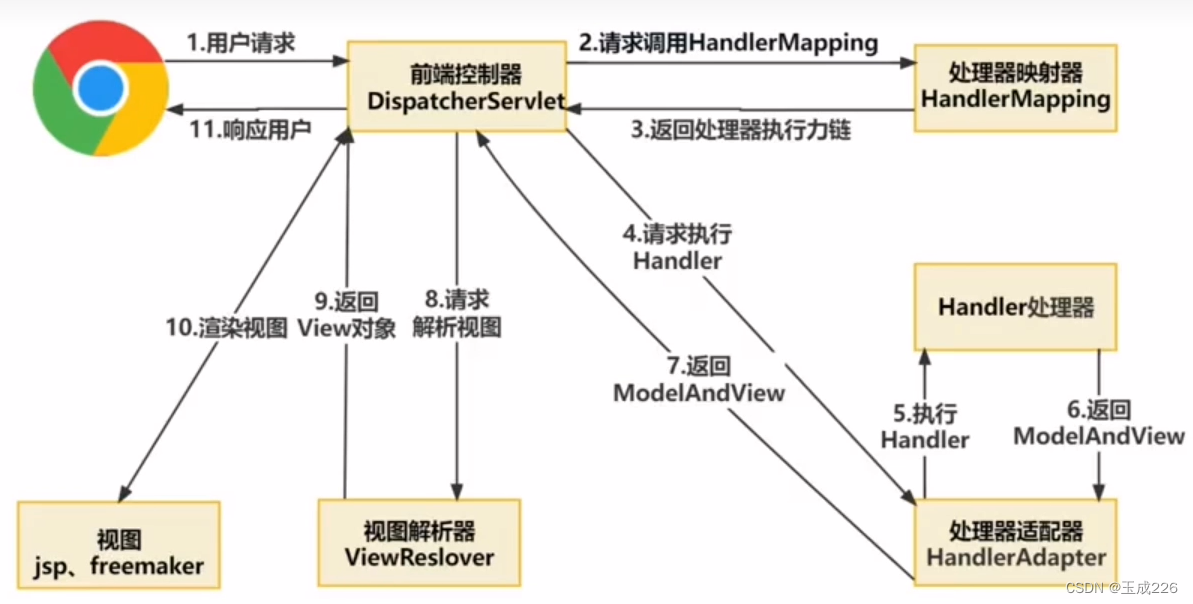
SpringMVC:SpringMVC执行流程
文章目录 一、介绍二、什么是MVC 一、介绍 Spring MVC 是一种基于Java的Web框架,它采用了MVC(Model - View - Controller)设计模式,通过吧Model、View和Controller分离,将Web层进行职责解耦,把复杂的Web应…...
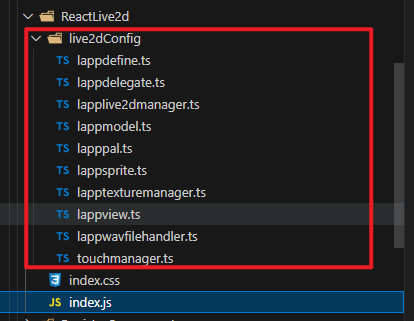
如何在前端网页实现live2d的动态效果
React如何在前端网页实现live2d的动态效果 业务需求: 因为公司需要做机器人相关的业务,主要是聊天形式的内容,所以需要一个虚拟的卡通形象。而且为了更直观的展示用户和机器人对话的状态,该live2d动画的嘴型需要根据播放的内容来…...

昇思25天学习打卡营第15天|linchenfengxue
Pix2Pix实现图像转换 Pix2Pix概述 Pix2Pix是基于条件生成对抗网络(cGAN, Condition Generative Adversarial Networks )实现的一种深度学习图像转换模型,该模型是由Phillip Isola等作者在2017年CVPR上提出的,可以实现语义/标签到…...

软考中级数据库系统工程师备考经验分享
前几天软考成绩出了,赶紧查询了一下发现自己顺利通过啦(上午63,下午67,开心),因此本文记录一下我的备考经验分享给大家。因为工作中项目管理类的知识没有系统学习过,本来想直接报名软考高级证书…...

Centos7删除MariaDB
在 CentOS 7 上删除 MariaDB 可以通过 yum 包管理器来完成。以下是一步一步的指导: 打开终端:首先,你需要打开你的 CentOS 7 系统的终端。 停止 MariaDB 服务(如果正在运行):在卸载 MariaDB 之前ÿ…...

【Docker系列】Docker 镜像构建中的跨设备移动问题及解决方案
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...

C++友元函数和友元类的使用
1.友元介绍 在C++中,友元(friend)是一种机制,允许某个类或函数访问其他类的私有成员。通过友元,可以授予其他类或函数对该类的私有成员的访问权限。友元关系在一些特定的情况下很有用,例如在类之间共享数据或实现特定的功能。 友元可以分为两种类型:类友元和函数友元。…...

黑马苍穹外卖技术亮点 详情
1.使用工厂模式和策略模式实现布隆过滤器解决缓存穿透问题 Bitmap Bitmap是一种数据结构,它使用位图来表示数据。在处理大量数据时,Bitmap可以通过将每个数据元素映射到一个位,然后使用位运算来对数据进行操作。 通过使用Bitmap,…...

Python酷库之旅-第三方库Pandas(005)
目录 一、用法精讲 7、pandas.read_clipboard函数 7-1、语法 7-2、参数 7-3、功能 7-4、返回值 7-5、说明 7-6、用法 7-6-1、代码示例 7-6-2、结果输出 8、pandas.DataFrame.to_clipboard函数 8-1、语法 8-2、参数 8-3、功能 8-4、返回值 8-5、说明 8-6、用法…...

javascripr如何设计弹出输入框并在网页内输出输入内容
javascript如何设计弹出输入对话框 这里就需要用到prompt语言 它的语法格式是 prompt(对话框内容) 如何把在对话框里输入内容输出到网页里,需要先定义一个变量,用var或let都可以。 假定变量名为a,代码是 let aprompt(请输入…...

gitee代码初次上传步骤
ps. 前提是已经下载安装gitee 一、在本地项目目录下空白处右击,选择“Git Bash Here” 二、初始化 git init 三、添加、提交代码(注意add与点之间的空格) git add . git commit -m 添加注释 四、连接、推送到gitee仓库 git remote add …...

android调用openssl库
android 调用openssl库 一、openssl安装编译 下载openssl-1.1.1w.tar.gz和android-ndk-r21e-linux-x86_64.zip解压android-ndk-r21e-linux-x86_64.zip到/opt/pj_ssl目录下,然后配置环境 vim ~/.bashrc增加如下内容 export NDK_HOME/opt/pj_ssl/android-ndk-r21e…...
Hugging face Transformers(3)—— Tokenizer
Hugging Face 是一家在 NLP 和 AI 领域具有重要影响力的科技公司,他们的开源工具和社区建设为NLP研究和开发提供了强大的支持。它们拥有当前最活跃、最受关注、影响力最大的 NLP 社区,最新最强的 NLP 模型大多在这里发布和开源。该社区也提供了丰富的教程…...

kubernetes集群部署:环境准备及master节点部署(二)
主机名IPv4地址IPv6地址角色安装组件操作系统k8s130-node190192.168.XX.190240a:XX::190masterkubeadm、kubelet、containerdAnolis OS 8.94.19.91-28.1.an8.x86_64k8s130-node191192.168.XX.191240a:XX::191nodekubeadm、kubelet、cri-oAnolis OS 8.94.19.91-28.1.an8.x86_64k…...

第8篇 智能合约的商业应用场景解析
一、引言 在区块链技术的众多应用中,智能合约无疑是其中的一颗璀璨明珠。它通过自动化、去中心化和不可篡改的特性,为商业世界带来了革命性的变革。今天,我们将一同探索智能合约在十个不同行业中的实际应用,感受其独特的魅力。 二、智能合约的商业应用案例 供应链管理:…...

Zabbix 配置grafana对接
zabbix对接grafana简介 Zabbix与Grafana对接可以实现更加丰富和美观的数据可视化,可以利用Grafana强大的可视化功能来展示Zabbix收集的数据。 Grafana 本身是提供了Zabbix的对接插件,开箱即用,安装好了之后点击 enable 一下就能启用。然后就…...
)
从测速到配置:一套完整的cFosSpeed网络加速保姆级教程(适用于小白)
从零开始掌握cFosSpeed:网络加速全流程实战指南对于经常进行在线游戏、视频会议或大文件传输的用户来说,网络延迟和带宽利用率低下往往是影响体验的关键痛点。cFosSpeed作为一款专业的网络流量优化工具,能够显著改善这些问题,但许…...

基于Arduino与应变片传感器的高精度厨房电子秤DIY全攻略
1. 项目概述:用Arduino打造一台高精度厨房电子秤作为一个喜欢在厨房里折腾的硬件爱好者,我经常遇到需要精确称量食材的场合。市面上的电子秤要么精度不够,要么价格不菲,要么功能单一。于是,我萌生了自己动手做一台的想…...

QMCDecode终极指南:3步解锁QQ音乐加密格式,实现跨平台音乐自由
QMCDecode终极指南:3步解锁QQ音乐加密格式,实现跨平台音乐自由 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目…...

遭遇薪酬倒挂后的反向谈判与资产重估策略「蒸汽求职分享」
在 2026 年全球科技大厂与跨国泛金融巨头追求极致人效、频繁进行组织架构重组(Reorg)的买方市场中,一个让无数海外名校留学生在入职两年后心态瞬间崩塌的现象,正在高频发生——“薪酬倒挂(Salary Inversion)…...

收藏干货|2026 版双非零基础入局大模型开发,RAG 与 Agent 就业上岸全攻略
日常总能收到不少初学伙伴的私信,大家普遍都有同一个疑惑:二本及普通院校学历,零基础入门 RAG、Agent 大模型应用开发,究竟能不能顺利入职?行业后续发展前景又如何? 本篇 2026 年全新内容,不空谈…...

机器学习力场攻克Peierls相变动力学:从对称性描述符到畴生长标度律
1. 项目概述:当机器学习遇见Peierls相变在凝聚态物理和材料科学的前沿,我们常常被一个核心问题所困扰:如何精确地模拟那些由电子和晶格(原子)强烈耦合所驱动的复杂动力学过程?这类系统,比如电荷…...

D2DX如何让暗黑破坏神2在4K显示器上流畅运行:5个关键技术解析
D2DX如何让暗黑破坏神2在4K显示器上流畅运行:5个关键技术解析 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 当…...

告别Selenium?手把手教你用Playwright录制脚本,5分钟搞定Web自动化测试
5分钟极速上手Playwright脚本录制:零代码实现Web自动化测试当产品经理突然丢给你一个刚上线的电商活动页,要求半小时内完成所有核心链路测试时,传统的手写Selenium脚本显然来不及。作为测试工程师,我最近发现微软开源的Playwright…...

终极音乐解锁指南:3步让加密音乐在任何设备自由播放
终极音乐解锁指南:3步让加密音乐在任何设备自由播放 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: https:/…...

概率论:常见分布的期望与方差、中心极限定理、切比雪夫不等式
目录 一、0、1分布 二、二项分布 三、泊松分布 四、均匀分布 五、指数分布 六、正态分布 七、中心极限定理及其应用 (1)中心极限定理的定义 (2)使用示例 八、切比雪夫不等式 (1)切比雪夫不…...