【文献解析】一种像素级的激光雷达相机配准方法
大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。随着知识的越来越多,越来越细,我准备整理一个自己的激光SLAM学习笔记专栏,从0带大家快速上手激光SLAM,也方便想入门SLAM的同学和小白学习参考,相信看完会有一定的收获。如有不对的地方欢迎指出,欢迎各位大佬交流讨论,一起进步。博主创建了一个科研互助群Q:951026257,欢迎大家加入讨论。
Pixel-Level Extrinsic Self Calibration of High Resolution LiDAR and Camera in Targetless Environments
论文地址:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9495137
代码:GitHub - hku-mars/livox_camera_calib: This repository is used for automatic calibration between high resolution LiDAR and camera in targetless scenes.
一、文章概述
1.问题导向
在开发自动驾驶汽车时,通常会将激光雷达 (LiDAR)与摄像头传感器结合在一起。激光雷达传感器由于其直接的3D测量能力,已广泛应用于障碍物检测、跟踪和地图绘制应用。外部校准是机器人技术中一个研究得很好的问题,主要分为两类:基于目标的校准和无目标的校准。它们之间的主要区别在于它们如何定义和提取来自两个传感器的特征。当前的外部校准方法严重依赖外部目标,例如棋盘格或特定的图像模式。通过从图像和点云中检测、提取和匹配特征点,将原始问题转化为最小二乘方程并用其求解。由于这些校准目标通常放置在传感器套件附近,因此在远程场景中(例如大规模点云着色),外部误差可能会放大。

2.目标
为了解决上述挑战,我们在本文中提出了一种无目标环境下的自动像素级外部校准方法。该系统通过从图像和点云中提取自然边缘特征并最小化重新投影误差来运行。
3.摘要
在本文中,我们提出了一种在无目标环境下自动外部校准高分辨率 LiDAR 和 RGB 相机的新方法。我们的方法不需要棋盘格,而是可以通过对齐两个传感器中的自然边缘特征来实现像素级的精度。在理论层面,我们分析了边缘特征所施加的约束以及校准精度对场景中边缘分布的敏感性。在实现层面,我们仔细研究了 LiDAR 的物理测量原理,并提出了一种基于点云体素切割和平面拟合的高效准确的LiDAR边缘提取方法。由于自然场景中边缘的丰富性,我们在许多室内和室外场景中进行了实验。结果表明,该方法具有很高的鲁棒性、准确性和一致性。它可以促进 LiDAR 和相机融合的研究和应用。我们已经在 GitHub1 上开源了我们的代码,以造福社区。
4.贡献
- 我们仔细研究了激光雷达测量的底层原理,发现常用的深度不连续边缘特征对于校准来说既不准确也不可靠。我们提出了一种新颖、可靠的深度连续边缘提取算法,从而获得更准确的校准参数。
- 我们评估了我们的方法和实现在各种室内和室外环境中的稳健性、一致性和准确性,并将我们的方法与其他最先进的方法进行了比较。结果表明,我们的方法对初始条件具有稳健性,与校准场景一致,并在自然环境中实现了像素级校准精度。我们的方法的精度与基于目标的方法相当(有时甚至更好),并且适用于新兴的固态和传统的旋转激光雷达。
- 我们开发了一款实用的校准软件,并在 GitHub1 上开源,造福社区
二、方法
2.1 边缘提取
为了避免投影引起的零值和多值映射问题,我们直接在 LiDAR 点云上提取边缘特征。边缘有两种类型:深度不连续和深度连续。
深度不连续边缘是指前景物体与背景物体之间的边缘,深度发生跳跃;相反,深度连续边缘是指深度连续变化的线的平面连接边缘。然而,仔细研究 LiDAR 测量原理,我们发现深度不连续边缘对于高精度校准来说既不可靠也不准确。当从前景物体扫描到背景物体时,一部分激光脉冲被前景物体反射,另一部分被背景反射,产生两个反射脉冲到达激光接收器。在前景物体反射率较高的情况下,第一个脉冲产生的信号将占主导地位,即使光束中心线偏离前景物体,也会造成前景物体的假点超出实际边缘(图(a)中最左边的黄色点)。当前景物体靠近背景时,两个脉冲引起的信号会汇合,汇合信号会形成一组连接前景和背景的点(称为出血点,即图 (a) 中的黄色点)。这两个现象会错误地夸大前景物体,并在边缘提取(图 (b))和校准中造成重大错误。
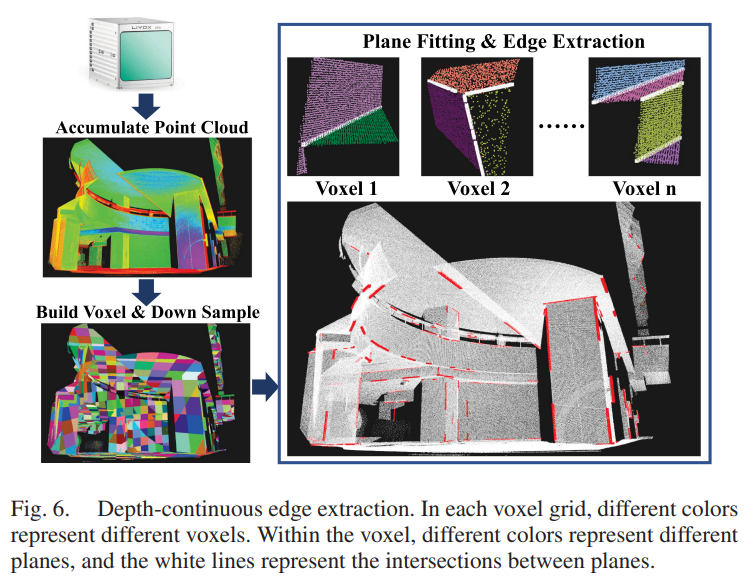
为了避免深度不连续边缘引起的前景膨胀和出血点,我们提出提取深度连续边缘,如下图所示。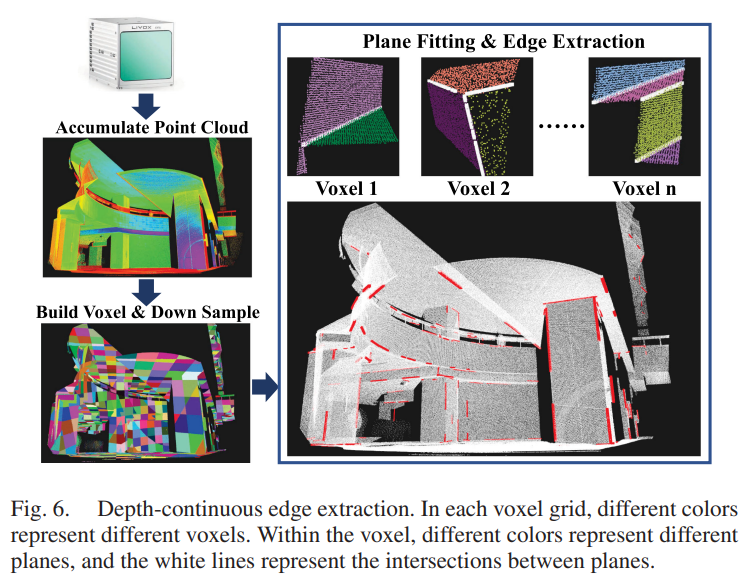
(1) 我们首先将点云划分为给定大小的小体素
(2) 对于每个体素,我们重复使用 RANSAC 来拟合和提取体素中包含的平面。
(3) 然后,我们保留相连且在一定范围内形成一定角度的平面对(例如 [30°, 150°]),并求解平面相交线
(4) 对于图像边缘提取,我们使用Canny算法[19]。
(5) 提取的边缘像素保存在k-D树(k=2)中,用于对应匹配。
详情请看。。。
【文献解析】一种像素级的激光雷达相机配准方法 - 古月居 (guyuehome.com)
相关文章:
【文献解析】一种像素级的激光雷达相机配准方法
大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。随着知识的越来越多,越来越细,我准备整理一个自己的激光SLAM学习笔记专栏,从0带大家快速上手激…...
Http 实现请求body体和响应body体的双向压缩方案
目录 一、前言 二、方案一(和http header不进行关联) 二、方案二(和http header进行关联) 三、 客户端支持Accept-Encoding压缩方式,服务器就一定会进行压缩吗? 四、参考 一、前言 有时请求和响应的body体比较大,需要进行压缩,以减少传输的带宽。 二、方案一(和…...

C++(Qt)-GIS开发-简易瓦片地图下载器
Qt-GIS开发-简易瓦片地图下载器 文章目录 Qt-GIS开发-简易瓦片地图下载器1、概述2、安装openssl3、实现效果4、主要代码4.1 算法函数4.2 瓦片地图下载url拼接4.3 多线程下载 5、源码地址6、参考 更多精彩内容👉个人内容分类汇总 👈👉GIS开发 …...

誉天教育7月开班计划:为梦想插上腾飞的翅膀!
随着夏日的脚步渐近,誉天教育也迎来了新一轮的学习热潮。在这个充满活力和希望的季节里,我们精心策划了7月的开班计划,旨在为广大学子提供一个优质、高效的学习平台,助力他们追逐梦想,实现自我价值。 本月 Linux云计算…...

STM32基础篇:GPIO
GPIO简介 GPIO:即General Purpose Input/Output,通用目的输入/输出。就是一种片上外设(内部模块)。 对于STM32的芯片来说,周围有一圈引脚,有时需要对引脚进行读写(读:从外部输入一…...

HTTPS 发送请求出现TLS握手失败
最近在工作中,调外部接口,发现在clientHello步骤报错,服务端没有返回serverHello。 从网上找了写方法,都没有解决; 在idea的vm options加上参数: -Djavax.net.debugSSL,handshake 把SSL和handshake的日…...

数字化精益生产系统--IFS财务管理系统
IFS财务管理系统是一款功能丰富、高效且灵活的企业财务管理软件,广泛应用于多个行业和不同规模的企业中。以下是对IFS财务管理系统的功能设计:...

基于SpringBoot的校园台球厅人员与设备管理系统
本系统是要设计一个校园台球厅人员与设备管理系统,这个系统能够满足校园台球厅人员与设备的管理及用户的校园台球厅人员与设备管理功能。系统的主要功能包括首页、个人中心、用户管理、会员账号管理、会员充值管理、球桌信息管理、会员预约管理、普通预约管理、留言…...

免杀笔记 ---> Session0--DLL注入
刚更新完上一篇,于是我们就马不停蹄的去跟新下一篇!! Session0注入 :: 各位看官如果觉得还不错的可以给博主点个赞💕💕 这次,我把这个脚本直接传到Github上了 喜欢的师傅点个Star噢…...

如何做好IT类的技术面试?
我们在找工作时,需要结合自己的现状,针对意向企业做好充分准备。作为程序员,你有哪些面试IT技术岗的技巧? 方向一:分享你面试IT公司的小技巧 我分享一些基于广泛观察和用户反馈的面试IT公司的小技巧: 技术准…...
A7 配置方式Master SPI如何更改位宽
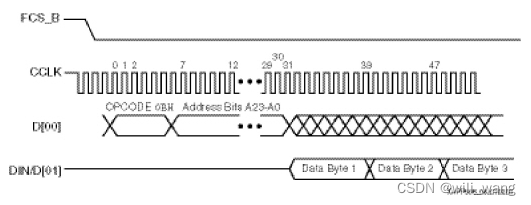
在 FPGA 完成自初始化后,INIT 释放,FPGA 对模式引脚 (M[2:0]) 进行采样,以确定使用哪种配置模式。当模式引脚 M[2:0] 001 时,FPGA 开始以大约 3 MHz 的频率在 CCLK 上输出时钟。随后,FCS_B 驱动为低电平,紧…...

linux kthread任务管理
目录 一、linux 创建内核线程1.1 kthread_create1.2 kthread_create_worker kthread_queue_work 二、设置线程优先级和调度策略2.1 sched_setscheduler2.2 调度策略 一、linux 创建内核线程 1.1 kthread_create 在 linux 中,可以使用 kthread_create 接口创建内核…...

第一节 网络安全概述
一.网络空间安全 网络空间:一个由信息基础设施组成相互依赖的网络。 ---- 海陆空天(大海、陆 地、天空、航天) 通信保密阶段 ---- 计算机安全 ----- 信息系统安全 ----- 网络空间安全 计算机安全:开始秉持着“严于律己&#x…...

星光云VR全景系统源码
星光云VR全景系统源码 体验地址请查看...
: 源码分析之异常类spdlog_ex)
spdlog一个非常好用的C++日志库(七): 源码分析之异常类spdlog_ex
目录 1.自定义异常类spdlog_ex 1.1.通用异常 1.2.系统调用异常 1.3.what()函数 2.异常的使用 2.1.抛出异常 2.2.控制异常使用 1.自定义异常类spdlog_ex 标准库异常类(std::exception)系列,能满足大多数使用异常的场景,但对…...

从一次 SQL 查询的全过程了解 DolphinDB 线程模型
1. 前言 DolphinDB 的线程模型较为复杂,写入与查询分布式表都可能需要多个类型的线程。通过了解 SQL 查询的全过程,可以帮助我们了解 DolphinDB 的线程模型,掌握 DolpinDB 的配置,以及优化系统性能的方法。 本教程以一个分布式 …...

Vue3.js“非原始值”响应式实现基本原理笔记(二)
如果您觉得这篇文章有帮助的话!给个点赞和评论支持下吧,感谢~ 作者:前端小王hs 阿里云社区博客专家/清华大学出版社签约作者/csdn百万访问前端博主/B站千粉前端up主 此篇文章是博主于2022年学习《Vue.js设计与实现》时的笔记整理而来 书籍&a…...
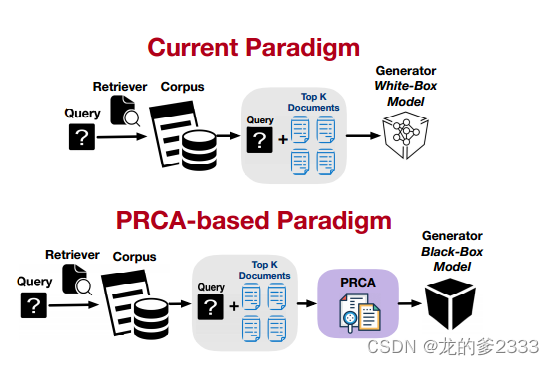
论文 | PRCA: 通过可插拔奖励驱动的上下文适配器拟合用于检索问答的黑盒大语言模型
论文全称:PRCA: Fitting Black-Box Large Language Models for Retrieval Question Answering via Pluggable Reward-Driven Contextual Adapter 核心问题:如何在检索增强式问答(ReQA)任务中,利用大型语言模型…...

网络状态的智能感知:WebKit 支持 Network Information API 深度解析
网络状态的智能感知:WebKit 支持 Network Information API 深度解析 在现代 Web 应用中,理解用户的网络连接状态对于提供适应性体验至关重要。Network Information API,一个新兴的 Web API,允许 Web 应用访问设备的网络信息&…...

Vue3基础知识:组合式API中的provide和inject,他们作用是什么?如何使用?以及案例演示
1.provide和inject相较于父子传递的不同在于provide,inject可以用于跨层级通信(通俗易懂的讲就是可以实现爷孙之间的直接信息传递)。 1.跨层级传递数据 1.在顶层组件通过provide函数提供数据 2.底层组件通过inject函数获取数据 演示一:跨…...

告别命令行!用Python脚本批量管理Docker容器,效率提升不止一点点
告别命令行!用Python脚本批量管理Docker容器,效率提升不止一点点每次在终端敲入docker ps、docker stop、docker rm时,你是否想过——当容器数量超过两位数,这种重复劳动是否在消耗你的生命?去年我们团队在迁移微服务架…...

解决Claude Code访问不稳定与Token不足的痛点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code访问不稳定与Token不足的痛点 许多开发者将Claude Code作为日常编程的得力助手,用于代码生成、问题调试…...

6款高效降AI率工具 改写实力出众
写论文时反复检测出的AI痕迹总让你提心吊胆?别担心,这里整理了6款真正好用的论文降AI率工具,堪称应对AI生成特征的“得力助手”。它们能有效识别并消除AI生成的痕迹,改写能力出众,帮你快速降低查重率,顺利通…...

华硕笔记本终极性能控制指南:用G-Helper完全替代Armoury Crate
华硕笔记本终极性能控制指南:用G-Helper完全替代Armoury Crate 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zen…...
)
CentOS服务器上VNC连接失败?手把手教你排查并修复个人端口问题(附重启命令)
CentOS服务器VNC连接故障深度排查指南:从原理到实战当你在深夜赶项目时,突然发现VNC连接不上服务器,那种焦虑感我深有体会。去年参与半导体器件仿真项目时,我也曾被这个问题困扰整整两天。本文将分享一套经过实战检验的排查方法论…...

pan-baidu-download:百度网盘多线程下载加速器架构解析与性能优化指南
pan-baidu-download:百度网盘多线程下载加速器架构解析与性能优化指南 【免费下载链接】pan-baidu-download 百度网盘下载脚本 项目地址: https://gitcode.com/gh_mirrors/pa/pan-baidu-download pan-baidu-download是一款基于Python开发的百度网盘命令行下载…...

Veo 2提示词性能瓶颈诊断:基于1726组AB测试的token敏感度热力图与阈值红线预警
更多请点击: https://kaifayun.com 第一章:Veo 2提示词编写最佳实践总览 Veo 2 是 Google 推出的高性能视频生成模型,其对提示词(prompt)的语义精度、结构清晰度和上下文控制能力高度敏感。高质量提示词并非简单堆砌关…...

<背包问题>
背包问题是一类组合优化问题,其基本形式是给定一组物品,每个物品都有一个重量和一个价值,以及一个有限的背包容量,目标是在不超过背包容量的前提下,选择物品使得背包中的物品价值最大化。动态规划是解决背包问题的常用…...
)
Frida无Root Hook PC微信小程序源码(Electron+Chromium)
1. 这不是“破解”,而是一次对微信小程序运行机制的逆向观察 你有没有试过,在PC版微信里点开一个小程序,想看看它背后是怎么写的?比如某个电商小程序的优惠券逻辑、某个工具类小程序的数据渲染方式,甚至只是单纯好奇—…...

前馈补偿技术:用数字预失真驯服放大器非线性失真
1. 项目概述:用前馈补偿驯服放大器失真在音频发烧友和硬件工程师的圈子里,追求“高保真”几乎是一种信仰。我们总希望从扬声器里传出的声音,是录音现场或音乐制作人意图的完美复刻,纤毫毕现,不带一丝杂质。然而&#x…...