STM32智能机器人导航系统教程
目录
- 引言
- 环境准备
- 智能机器人导航系统基础
- 代码实现:实现智能机器人导航系统 4.1 数据采集模块 4.2 数据处理与导航算法 4.3 通信与网络系统实现 4.4 用户界面与数据可视化
- 应用场景:机器人导航应用与优化
- 问题解决方案与优化
- 收尾与总结
1. 引言
智能机器人导航系统通过STM32嵌入式系统结合各种传感器、执行器和通信模块,实现对机器人路径的实时规划、自动导航和数据传输。本文将详细介绍如何在STM32系统中实现一个智能机器人导航系统,包括环境准备、系统架构、代码实现、应用场景及问题解决方案和优化方法。
2. 环境准备
硬件准备
- 开发板:STM32F4系列或STM32H7系列开发板
- 调试器:ST-LINK V2或板载调试器
- 传感器:如激光雷达、红外传感器、IMU等
- 执行器:如电机、舵机等
- 通信模块:如Wi-Fi模块、蓝牙模块等
- 显示屏:如OLED显示屏
- 按键或旋钮:用于用户输入和设置
- 电源:电池组
软件准备
- 集成开发环境(IDE):STM32CubeIDE或Keil MDK
- 调试工具:STM32 ST-LINK Utility或GDB
- 库和中间件:STM32 HAL库和FATFS库
安装步骤
- 下载并安装STM32CubeMX
- 下载并安装STM32CubeIDE
- 配置STM32CubeMX项目并生成STM32CubeIDE项目
- 安装必要的库和驱动程序
3. 智能机器人导航系统基础
控制系统架构
智能机器人导航系统由以下部分组成:
- 数据采集模块:用于采集机器人环境中的距离、姿态等数据
- 数据处理与导航算法模块:对采集的数据进行处理和分析,执行导航算法
- 通信与网络系统:实现机器人与服务器或其他设备的通信
- 显示系统:用于显示系统状态和导航信息
- 用户输入系统:通过按键或旋钮进行设置和调整
功能描述
通过各种传感器采集机器人周围环境中的关键数据,并实时显示在OLED显示屏上。系统通过SLAM(同步定位与地图构建)算法和网络通信,实现对机器人路径的实时规划和导航。用户可以通过按键或旋钮进行设置,并通过显示屏查看当前状态。
4. 代码实现:实现智能机器人导航系统
4.1 数据采集模块
配置激光雷达
使用STM32CubeMX配置UART接口:
- 打开STM32CubeMX,选择您的STM32开发板型号。
- 在图形化界面中,找到需要配置的UART引脚,设置为UART模式。
- 生成代码并导入到STM32CubeIDE中。
代码实现:
#include "stm32f4xx_hal.h"
#include "usart.h"
#include "lidar.h"UART_HandleTypeDef huart1;void UART1_Init(void) {huart1.Instance = USART1;huart1.Init.BaudRate = 115200;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;HAL_UART_Init(&huart1);
}void Read_Lidar_Data(float* distance) {Lidar_Read(distance);
}int main(void) {HAL_Init();SystemClock_Config();UART1_Init();float distance;while (1) {Read_Lidar_Data(&distance);HAL_Delay(100);}
}
配置IMU
使用STM32CubeMX配置I2C接口:
- 打开STM32CubeMX,选择您的STM32开发板型号。
- 在图形化界面中,找到需要配置的I2C引脚,设置为I2C模式。
- 生成代码并导入到STM32CubeIDE中。
代码实现:
#include "stm32f4xx_hal.h"
#include "i2c.h"
#include "mpu6050.h"I2C_HandleTypeDef hi2c1;void I2C1_Init(void) {hi2c1.Instance = I2C1;hi2c1.Init.ClockSpeed = 100000;hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;hi2c1.Init.OwnAddress1 = 0;hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;hi2c1.Init.OwnAddress2 = 0;hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;HAL_I2C_Init(&hi2c1);
}void Read_IMU_Data(float* accel, float* gyro) {MPU6050_ReadAll(accel, gyro);
}int main(void) {HAL_Init();SystemClock_Config();I2C1_Init();MPU6050_Init();float accel[3], gyro[3];while (1) {Read_IMU_Data(accel, gyro);HAL_Delay(100);}
}
4.2 数据处理与导航算法
数据处理模块将传感器数据转换为可用于控制系统的数据,并进行必要的计算和分析。
SLAM算法
实现一个简单的SLAM算法,用于机器人导航:
typedef struct {float x;float y;float theta;
} RobotPose;RobotPose current_pose = {0.0f, 0.0f, 0.0f};void SLAM_Update(RobotPose* pose, float* distance, float* accel, float* gyro, float dt) {// 数据处理和SLAM算法// 更新机器人的位姿pose->x += accel[0] * dt * dt;pose->y += accel[1] * dt * dt;pose->theta += gyro[2] * dt;
}int main(void) {HAL_Init();SystemClock_Config();UART1_Init();I2C1_Init();MPU6050_Init();float distance;float accel[3], gyro[3];float dt = 0.01f;while (1) {Read_Lidar_Data(&distance);Read_IMU_Data(accel, gyro);SLAM_Update(¤t_pose, &distance, accel, gyro, dt);HAL_Delay(10);}
}
4.3 通信与网络系统实现
配置Wi-Fi模块
使用STM32CubeMX配置UART接口:
- 打打开STM32CubeMX,选择您的STM32开发板型号。
- 在图形化界面中,找到需要配置的UART引脚,设置为UART模式。
- 生成代码并导入到STM32CubeIDE中。
代码实现:
#include "stm32f4xx_hal.h"
#include "usart.h"
#include "wifi_module.h"UART_HandleTypeDef huart2;void UART2_Init(void) {huart2.Instance = USART2;huart2.Init.BaudRate = 115200;huart2.Init.WordLength = UART_WORDLENGTH_8B;huart2.Init.StopBits = UART_STOPBITS_1;huart2.Init.Parity = UART_PARITY_NONE;huart2.Init.Mode = UART_MODE_TX_RX;huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart2.Init.OverSampling = UART_OVERSAMPLING_16;HAL_UART_Init(&huart2);
}void Send_Data_To_Server(RobotPose* pose) {char buffer[64];sprintf(buffer, "Pose: x=%.2f, y=%.2f, theta=%.2f", pose->x, pose->y, pose->theta);HAL_UART_Transmit(&huart2, (uint8_t*)buffer, strlen(buffer), HAL_MAX_DELAY);
}int main(void) {HAL_Init();SystemClock_Config();UART1_Init();UART2_Init();I2C1_Init();MPU6050_Init();float distance;float accel[3], gyro[3];float dt = 0.01f;while (1) {Read_Lidar_Data(&distance);Read_IMU_Data(accel, gyro);SLAM_Update(¤t_pose, &distance, accel, gyro, dt);Send_Data_To_Server(¤t_pose);HAL_Delay(1000);}
}
4.4 用户界面与数据可视化
配置OLED显示屏
使用STM32CubeMX配置I2C接口:
- 打开STM32CubeMX,选择您的STM32开发板型号。
- 在图形化界面中,找到需要配置的I2C引脚,设置为I2C模式。
- 生成代码并导入到STM32CubeIDE中。
代码实现:
首先,初始化OLED显示屏:
#include "stm32f4xx_hal.h"
#include "i2c.h"
#include "oled.h"void Display_Init(void) {OLED_Init();
}
然后实现数据展示函数,将机器人导航数据展示在OLED屏幕上:
void Display_Data(RobotPose* pose) {char buffer[32];sprintf(buffer, "x: %.2f", pose->x);OLED_ShowString(0, 0, buffer);sprintf(buffer, "y: %.2f", pose->y);OLED_ShowString(0, 1, buffer);sprintf(buffer, "theta: %.2f", pose->theta);OLED_ShowString(0, 2, buffer);
}int main(void) {HAL_Init();SystemClock_Config();I2C1_Init();Display_Init();UART1_Init();I2C1_Init();MPU6050_Init();float distance;float accel[3], gyro[3];float dt = 0.01f;while (1) {Read_Lidar_Data(&distance);Read_IMU_Data(accel, gyro);SLAM_Update(¤t_pose, &distance, accel, gyro, dt);// 显示机器人导航数据Display_Data(¤t_pose);HAL_Delay(100);}
}
5. 应用场景:机器人导航应用与优化
自动化仓库
智能机器人导航系统可以用于自动化仓库,通过实时规划和导航路径,提高物料搬运效率和精度。
智能安防
在智能安防中,智能机器人导航系统可以实现自主巡逻和监控,提高安防效果。
室内导航
智能机器人导航系统可以用于室内导航,通过实时构建地图和规划路径,为用户提供导航服务。
智能制造
智能机器人导航系统可以用于智能制造,通过自主导航和操作,提高生产效率和灵活性。
⬇帮大家整理了单片机的资料
包括stm32的项目合集【源码+开发文档】
点击下方蓝字即可领取,感谢支持!⬇
点击领取更多嵌入式详细资料
问题讨论,stm32的资料领取可以私信!
6. 问题解决方案与优化
常见问题及解决方案
传感器数据不准确
确保传感器与STM32的连接稳定,定期校准传感器以获取准确数据。
解决方案:检查传感器与STM32之间的连接是否牢固,必要时重新焊接或更换连接线。同时,定期对传感器进行校准,确保数据准确。
导航系统不稳定
优化导航算法和硬件配置,减少导航系统的不稳定性,提高系统反应速度。
解决方案:优化SLAM算法,调整参数,提高定位和地图构建的精度和稳定性。使用高精度传感器,提高数据采集的精度和稳定性。选择更高效的执行器,提高导航系统的响应速度。
数据传输失败
确保Wi-Fi或蓝牙模块与STM32的连接稳定,优化通信协议,提高数据传输的可靠性。
解决方案:检查Wi-Fi或蓝牙模块与STM32之间的连接是否牢固,必要时重新焊接或更换连接线。优化通信协议,减少数据传输的延迟和丢包率。选择更稳定的通信模块,提升数据传输的可靠性。
显示屏显示异常
检查I2C通信线路,确保显示屏与MCU之间的通信正常,避免由于线路问题导致的显示异常。
解决方案:检查I2C引脚的连接是否正确,确保电源供电稳定。使用示波器检测I2C总线信号,确认通信是否正常。如有必要,更换显示屏或MCU。
优化建议
数据集成与分析
集成更多类型的传感器数据,使用数据分析技术进行环境状态的预测和优化。
建议:增加更多监测传感器,如超声波传感器、深度摄像头等。使用云端平台进行数据分析和存储,提供更全面的环境监测和管理服务。
用户交互优化
改进用户界面设计,提供更直观的数据展示和更简洁的操作界面,增强用户体验。
建议:使用高分辨率彩色显示屏,提供更丰富的视觉体验。设计简洁易懂的用户界面,让用户更容易操作。提供图形化的数据展示,如实时环境参数图表、历史记录等。
智能化控制提升
增加智能决策支持系统,根据历史数据和实时数据自动调整控制策略,实现更高效的环境控制和管理。
建议:使用数据分析技术分析环境数据,提供个性化的环境管理建议。结合历史数据,预测可能的问题和需求,提前优化控制策略。
7. 收尾与总结
本教程详细介绍了如何在STM32嵌入式系统中实现智能机器人导航系统,从硬件选择、软件实现到系统配置和应用场景都进行了全面的阐述。
相关文章:

STM32智能机器人导航系统教程
目录 引言环境准备智能机器人导航系统基础代码实现:实现智能机器人导航系统 4.1 数据采集模块 4.2 数据处理与导航算法 4.3 通信与网络系统实现 4.4 用户界面与数据可视化应用场景:机器人导航应用与优化问题解决方案与优化收尾与总结 1. 引言 智能机器…...
Android 15 适配之16K Page Size :为什么它会是最坑的一个适配点
首先什么是 Page Size ?一般意义上,页面(Page)指的就是 Linux 虚拟内存管理中使用的最小数据单位,页面大小(Page Size)就是虚拟地址空间中的页面大小, Linux 中进程的虚拟地址空间是由固定大小的页面组成。 Page Size 对于虚拟内…...

下载linux的吐槽
本来这几天放假了,想下一个linux玩一玩 教程(我就是根据这个教程进行下载的,但是呢在进行修改BIOS 模式的 地方遇见了困难,也许是电脑修过的原因,我狂按F12 以及 FnF12都没有BIOS设置,只有一个让我选择用w…...

【HTML入门】第四课 - 换行、分割横线和html的注释
这一小节,我们继续说HTML的入门知识,包括换行、横线分割以及注释(html的注释)。 目录 1 换行 2 分割横线 3 html注释 1 换行 html中分为块元素和行内元素。这一小节呢,先不说这些元素们,我们先说一下换…...
基于Hadoop平台的电信客服数据的处理与分析④项目实现:任务15:数据生产
任务描述 电信数据生产是一个完整且严密的体系,这样可以保证数据的鲁棒性。在本项目的数据生产模块中,我们来模拟生产一些电信数据。同时,我们必须清楚电信数据的格式和数据结构,这样才能在后续的数据产生、存储、分析和展示环节…...
Kotlin中的数据类型
人不走空 🌈个人主页:人不走空 💖系列专栏:算法专题 ⏰诗词歌赋:斯是陋室,惟吾德馨 目录 🌈个人主页:人不走空 💖系列专栏:算法专题 ⏰诗词歌…...

提高交易决策质量,Anzo Capital昂首资本只需两个交易策略
要想提高交易决策质量,其实很简单,Anzo Capital昂首资本只需两个交易策略,结合价格行为和VSA(成交量与价格分析)就可以达成我们的目的。首先,理解这两个概念: 1. 价格行为:价格行为是市场价格变动的方式&a…...
Ubuntu TensorRT安装
什么是TensorRT 一般的深度学习项目,训练时为了加快速度,会使用多 GPU 分布式训练。但在部署推理时,为了降低成本,往往使用单个 GPU 机器甚至嵌入式平台(比如 NVIDIA Jetson)进行部署,部署端也…...

spring mvc学习
第四章 Spring MVC 第一节 Spring MVC 简介 1. Spring MVC SpringMVC是一个Java 开源框架, 是Spring Framework生态中的一个独立模块,它基于 Spring 实现了Web MVC(数据、业务与展现)设计模式的请求驱动类型的轻量级Web框架&am…...

第4集《修习止观坐禅法要》
请打开讲义第七面,四、悟道。 我们前面讲到智者大师出家以后,他除了持戒以外,一方面拜忏,一方面就是打坐,来调伏他过去的烦恼跟罪业,以为他未来圆顿止观的一个基础,这以下讲到他开悟的情况&…...

IPython 日志的开关:精通 %logoff 命令的实用指南
IPython 日志的开关:精通 %logoff 命令的实用指南 在 IPython 的强大功能中,日志记录是一个不可或缺的工具,它帮助用户记录会话历史,以便日后分析和重现。%logoff 命令作为日志记录功能的补充,允许用户在需要时停止日…...

Redis 分布式集群方案 Cluster
引言 相比于Codis,Redis Cluster是Redis官方提供的解决方案。相比于Codis的不同,他是去中心化的,如图所示,该集群有三个Redis节点组成,每个节点负责整个集群的一部分数据,每个节点负责的数据多少可能不一样…...

Redis的两种持久化方案
Redis 提供了多种持久化机制来保证数据在发生意外情况下(如断电或服务器崩溃)不丢失。以下是几种主要的 Redis 持久化方案及其特点: 1. RDB (Redis Database Backup) RDB 是 Redis 创建的数据库快照,它可以将数据集快照以二进制…...

Spring中常见知识点及使用
Spring Framework 是 Java 生态系统中最流行的开源框架之一,它提供了一系列强大的功能,用于构建企业级应用。以下是一些常见的 Spring 知识点及其使用方法: 1. 依赖注入(Dependency Injection) 依赖注入是 Spring 的…...
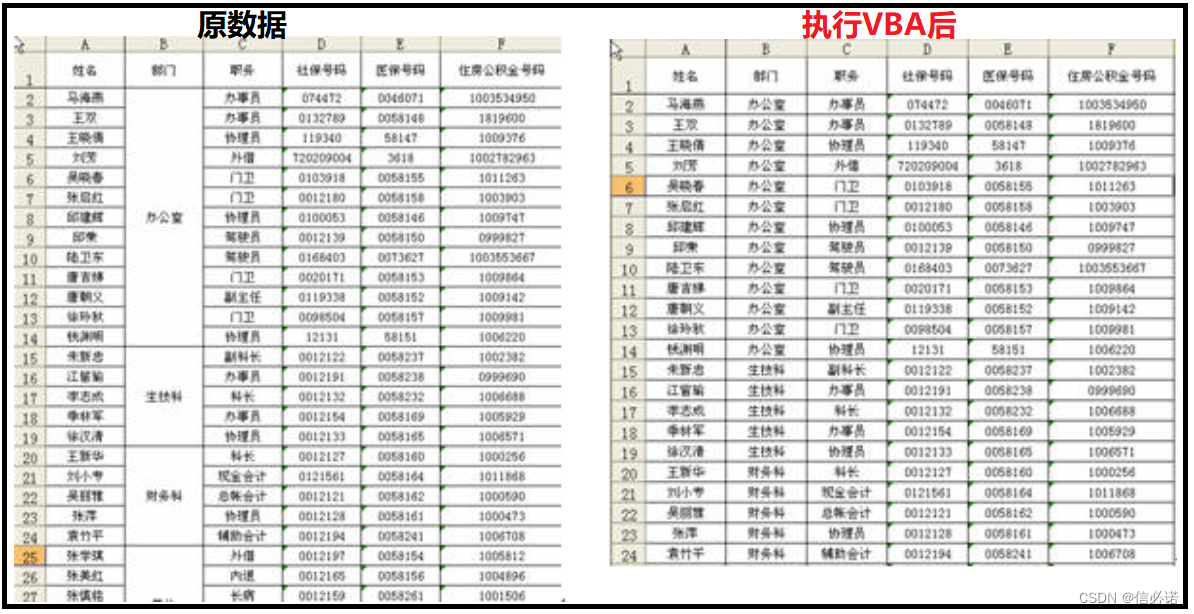
Excel 宏录制与VBA编程 ——VBA编程技巧篇二 (合并内容相同连续单元格、取消合并单元格并在每个单元格中保留内容)
1、合并内容相同的连续单元格 如果需要合并如图所示的工作表中B列中部门相同的连续单元格 VBA代码: Sub Mergerng()Dim IntRow As IntegerDim i As IntegerApplication.DisplayAlerts FalseWith Sheet1IntRow .Range("A65536").End(xlUp).RowFor i In…...

理解和应用工业设备字典文件:一篇详细指南
理解和应用工业设备字典文件:一篇详细指南 在工业自动化领域,设备和模块的配置和管理是一个复杂而重要的任务。为了简化这个过程,字典文件被广泛应用于描述离线对象字典。本文将详细解释字典文件的用途、格式,并举例说明如何引用…...

Python酷库之旅-第三方库Pandas(010)
目录 一、用法精讲 22、pandas.read_hdf函数 22-1、语法 22-2、参数 22-3、功能 22-4、返回值 22-5、说明 22-6、用法 22-6-1、数据准备 22-6-2、代码示例 22-6-3、结果输出 23、pandas.HDFStore.put方法 23-1、语法 23-2、参数 23-3、功能 23-4、返回值 23-5…...

海康威视监控web实时预览解决方案
海康威视摄像头都试rtsp流,web页面无法加载播放,所以就得转换成web页面可以播放的hls、rtmp等数据流来播放。 一:萤石云 使用萤石云平台,把rtsp转化成ezopen协议,然后使用组件UIKit 最佳实践 萤石开放平台API文档 …...
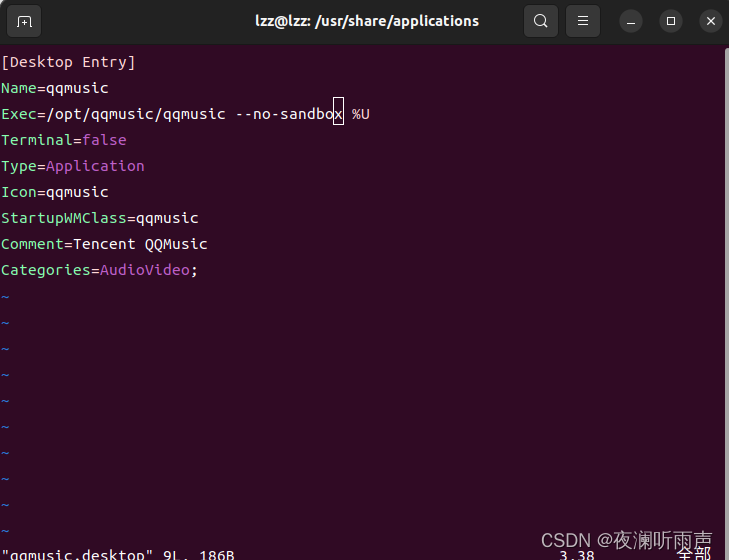
ubuntu运行qq音乐闪退
ubuntu运行qq音乐闪退 修改/usr/share/applications中的qqmusic.desktop,在Exec后加上 --no-sandbox,如下图所示: 该文件有可能是只读,权限不够的话用sudo vim qqmusic.desktop...

人脸检测(Python)
目录 环境: 初始化摄像头: 初始化FaceDetector对象: 获取摄像头帧: 获取数据: 绘制数据: 显示图像: 完整代码: 环境: cvzone库:cvzone是一个基于…...

用C语言解决‘换硬币’问题?我来教你如何调试和验证你的循环逻辑
用C语言解决‘换硬币’问题?我来教你如何调试和验证你的循环逻辑 当你第一次面对"换硬币"这类组合问题时,那种既兴奋又困惑的感觉我至今记忆犹新。作为C语言初学者,理解多重循环的运作机制就像在迷宫中寻找出口——每次你以为找到了…...

PA100K数据集实战:从下载到结构化解析全流程
1. PA100K数据集初探:为什么选择它?如果你正在研究行人属性识别,PA100K绝对是个绕不开的宝藏数据集。这个数据集包含了10万张真实监控场景下的行人图像,每张图都标注了26种常见属性——从衣着风格(比如是否穿T恤、裙子…...

Office RibbonX Editor:让Office界面定制变得像搭积木一样简单
Office RibbonX Editor:让Office界面定制变得像搭积木一样简单 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbon…...

Arduino PWM转4-20mA工业电流信号:二阶滤波与V/I转换电路设计
1. 项目概述:从PWM到工业标准电流信号在工业自动化、过程控制和传感器领域,4-20 mA电流环是一个几乎无处不在的标准。它用4 mA代表测量值的下限(如0C),20 mA代表上限(如100C),这种设…...

别再死记硬背Payload了!我用XSS-Game靶场,带你拆解18种过滤规则背后的绕过逻辑
从XSS-Game靶场实战中掌握18种过滤规则的逆向思维在网络安全领域,跨站脚本攻击(XSS)始终是Web应用面临的主要威胁之一。许多开发者虽然了解XSS的基本概念,但当面对各种复杂的过滤规则时,往往不知如何系统分析并构造有效…...

WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南
WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 魔兽争霸III作为经典即时战…...

【DeepSeek架构评审功能深度解密】:20年架构师亲授3大避坑指南与5步落地 checklist
更多请点击: https://kaifayun.com 第一章:DeepSeek架构评审功能全景概览 DeepSeek架构评审功能是一套面向大模型系统设计与工程落地的自动化分析框架,聚焦于模型结构合理性、计算图优化潜力、内存访问模式、算子兼容性及部署约束等多维度评…...

Taotoken如何帮助教育科技产品实现个性化学习辅导
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助教育科技产品实现个性化学习辅导 1. 场景与挑战 教育科技公司在开发个性化学习助手时,常常面临一个核…...

Taotoken的审计日志功能为企业API安全与合规管理提供支持
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的审计日志功能为企业API安全与合规管理提供支持 当企业决定将大模型能力集成到内部业务流程中时,IT管理员和安…...

万星easy-vibe:描述需求即发布 零基础无需学语法
开源Easy-Vibe是一套开源AI编程学习方案,把学习顺序从先学语法再做项目翻转为直接做项目。文章拆解了项目驱动、提示词编写、AI编辑器和多Agent协作的完整流程,解释了为什么想法比语法更重要。 github上datawhalechina/easy-vibe:它在GitHub…...