(20)目标检测算法之YOLOv5计算预选框、详解anchor计算
目标检测算法之YOLOv5计算预选框、详解anchor计算
- 单节段目标检测算法中:预选框的设定直接影响最终的检测精度
- 众所周知,yolov5中采用自适应调整预选框anchor的大小,但万事开头难,配置文件config中的预设还是很重要
- yolo算法作为one-stage领域的佼佼者,采用anchor-based的方法进行目标检测,使用不同尺度的anchor直接回归目标框并一次性输出目标框的位置和类别置信度。
- 下边根据最近的调研做出这块的一个详细总结:
1.YOLOv5网络结构
- yolov5中使用的coco数据集输入图片的尺寸为
640x640,但是训练过程的输入尺寸并不唯一,因为v5可以采用masaic增强技术把4张图片的部分组成了一张尺寸一定的输入图片。但是如果需要使用预训练权重,最好将输入图片尺寸调整到与作者相同的尺寸,而且输入图片尺寸必须是32的倍数,这与下面anchor检测的阶段有关。
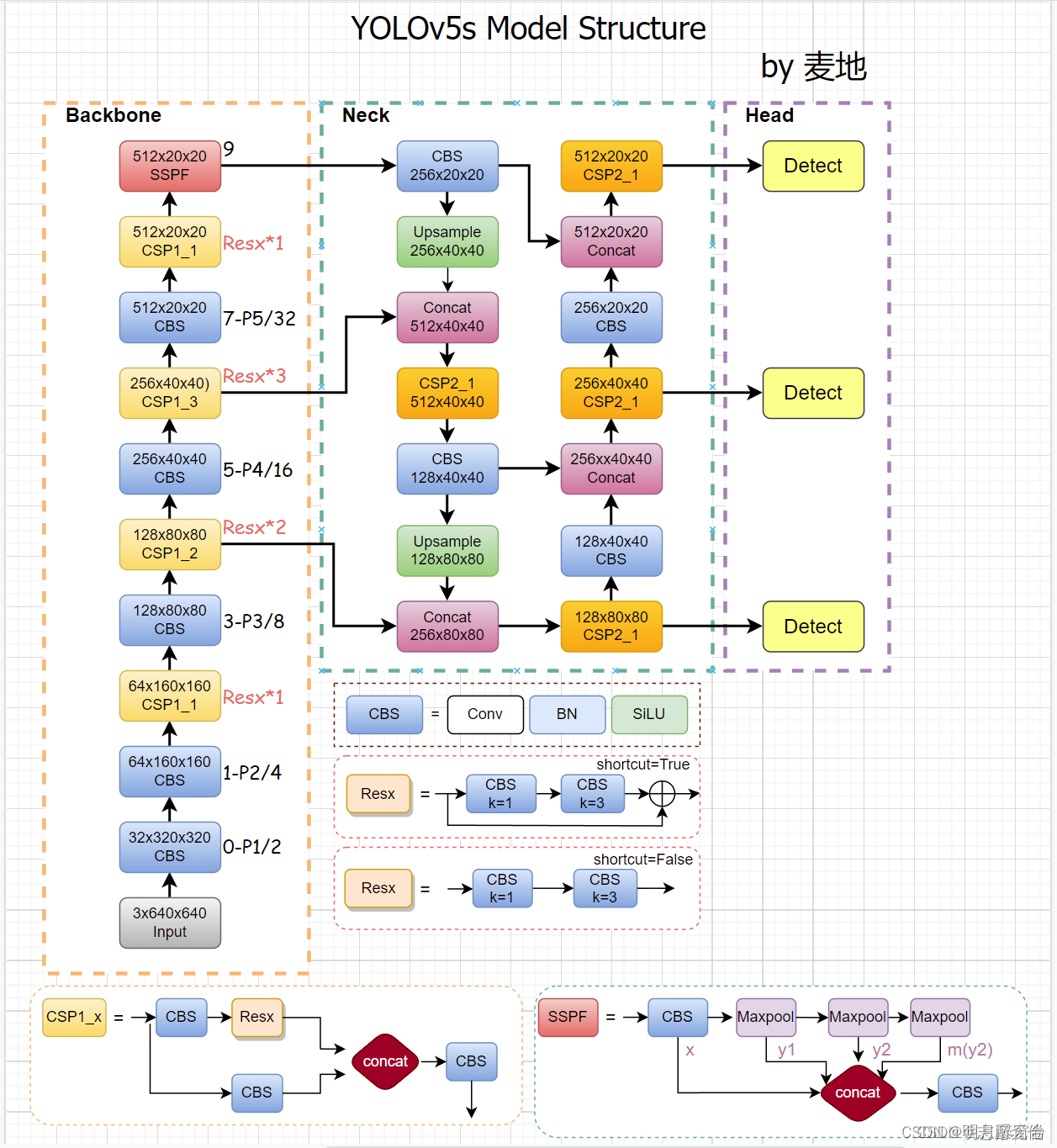
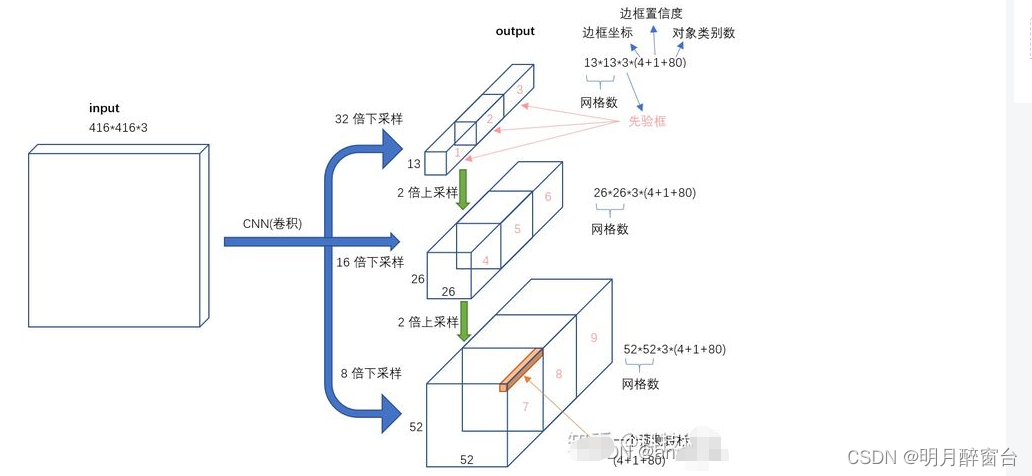
- 当我们的输入尺寸为640*640时,会得到3个不同尺度的输出:80x80(640/8)、40x40(640/16)、20x20(640/32),即上图中的CSP2_3模块的输出。
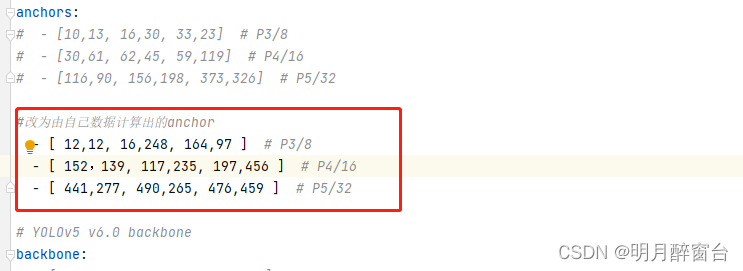
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32
-
anchors参数共有三行,每行9个数值;且每一行代表应用不同的特征图:
-
第一行是在最大的特征图上的锚框,80x80代表浅层的特征图(P3),包含较多的低层级信息,适合用于检测小目标,所以这一特征图所用的anchor尺度较小;
-
第二行是在中间的特征图上的锚框,20x20代表深层的特征图(P5),包含更多高层级的信息,如轮廓、结构等信息,适合用于大目标的检测,所以这一特征图所用的anchor尺度较大;
-
第三行是在最小的特征图上的锚框,另外的40x40特征图(P4)上就用介于这两个尺度之间的anchor用来检测中等大小的目标。
-
-
在目标检测任务中,一般希望在大的特征图上去检测小目标,因为大特征图才含有更多小目标信息,因此大特征图上的anchor数值通常设置为小数值,而小特征图上数值设置为大数值检测大的目标,yolov5之所以能高效快速地检测跨尺度目标,这种对不同特征图使用不同尺度的anchor的思想功不可没。
-
以上就是yolov5中的anchors的具体解释。
2. 训练时自动计算anchor
-
yolov5 中不是只使用默认锚定框,在开始训练之前会对数据集中标注信息进行核查,计算此数据集标注信息针对默认锚定框的最佳召回率,当最佳召回率大于或等于0.98,则不需要更新锚定框;如果最佳召回率小于0.98,则需要重新计算符合此数据集的锚定框。
-
核查锚定框是否适合要求的函数在 /utils/autoanchor.py 文件中:
def check_anchors(dataset, model, thr=4.0, imgsz=640):
#其中 thr 是指 数据集中标注框宽高比最大阈值,默认是使用 超参文件 hyp.scratch.yaml 中的 “anchor_t” 参数值。
- 核查主要代码如下:
def metric(k): # compute metricr = wh[:, None] / k[None]x = torch.min(r, 1. / r).min(2)[0] # ratio metricbest = x.max(1)[0] # best_xaat = (x > 1. / thr).float().sum(1).mean() # anchors above thresholdbpr = (best > 1. / thr).float().mean() # best possible recallreturn bpr, aatbpr, aat = metric(m.anchor_grid.clone().cpu().view(-1, 2))
其中:
bpr(best possible recall)
aat(anchors above threshold)
其中 bpr 参数就是判断是否需要重新计算锚定框的依据(是否小于 0.98)。
- 重新计算符合此数据集标注框的锚定框,是利用
kmean聚类方法实现的,代码在/utils/autoanchor.py文件中:
def kmean_anchors(dataset='./data/coco128.yaml', n=9, img_size=640, thr=4.0, gen=1000, verbose=True):""" Creates kmeans-evolved anchors from training datasetArguments:dataset: path to data.yaml, or a loaded datasetn: number of anchorsimg_size: image size used for trainingthr: anchor-label wh ratio threshold hyperparameter hyp['anchor_t'] used for training, default=4.0gen: generations to evolve anchors using genetic algorithmverbose: print all resultsReturn:k: kmeans evolved anchorsUsage:from utils.autoanchor import *; _ = kmean_anchors()"""from scipy.cluster.vq import kmeansnpr = np.randomthr = 1 / thrdef metric(k, wh): # compute metricsr = wh[:, None] / k[None]x = torch.min(r, 1 / r).min(2)[0] # ratio metric# x = wh_iou(wh, torch.tensor(k)) # iou metricreturn x, x.max(1)[0] # x, best_xdef anchor_fitness(k): # mutation fitness_, best = metric(torch.tensor(k, dtype=torch.float32), wh)return (best * (best > thr).float()).mean() # fitnessdef print_results(k, verbose=True):k = k[np.argsort(k.prod(1))] # sort small to largex, best = metric(k, wh0)bpr, aat = (best > thr).float().mean(), (x > thr).float().mean() * n # best possible recall, anch > thrs = f'{PREFIX}thr={thr:.2f}: {bpr:.4f} best possible recall, {aat:.2f} anchors past thr\n' \f'{PREFIX}n={n}, img_size={img_size}, metric_all={x.mean():.3f}/{best.mean():.3f}-mean/best, ' \f'past_thr={x[x > thr].mean():.3f}-mean: 'for x in k:s += '%i,%i, ' % (round(x[0]), round(x[1]))if verbose:LOGGER.info(s[:-2])return kif isinstance(dataset, str): # *.yaml filewith open(dataset, errors='ignore') as f:data_dict = yaml.safe_load(f) # model dictfrom utils.dataloaders import LoadImagesAndLabelsdataset = LoadImagesAndLabels(data_dict['train'], augment=True, rect=True)# Get label whshapes = img_size * dataset.shapes / dataset.shapes.max(1, keepdims=True)wh0 = np.concatenate([l[:, 3:5] * s for s, l in zip(shapes, dataset.labels)]) # wh# Filteri = (wh0 < 3.0).any(1).sum()if i:LOGGER.info(f'{PREFIX}WARNING: Extremely small objects found: {i} of {len(wh0)} labels are < 3 pixels in size')wh = wh0[(wh0 >= 2.0).any(1)] # filter > 2 pixels# wh = wh * (npr.rand(wh.shape[0], 1) * 0.9 + 0.1) # multiply by random scale 0-1# Kmeans inittry:LOGGER.info(f'{PREFIX}Running kmeans for {n} anchors on {len(wh)} points...')assert n <= len(wh) # apply overdetermined constraints = wh.std(0) # sigmas for whiteningk = kmeans(wh / s, n, iter=30)[0] * s # pointsassert n == len(k) # kmeans may return fewer points than requested if wh is insufficient or too similarexcept Exception:LOGGER.warning(f'{PREFIX}WARNING: switching strategies from kmeans to random init')k = np.sort(npr.rand(n * 2)).reshape(n, 2) * img_size # random initwh, wh0 = (torch.tensor(x, dtype=torch.float32) for x in (wh, wh0))k = print_results(k, verbose=False)# Plot# k, d = [None] * 20, [None] * 20# for i in tqdm(range(1, 21)):# k[i-1], d[i-1] = kmeans(wh / s, i) # points, mean distance# fig, ax = plt.subplots(1, 2, figsize=(14, 7), tight_layout=True)# ax = ax.ravel()# ax[0].plot(np.arange(1, 21), np.array(d) ** 2, marker='.')# fig, ax = plt.subplots(1, 2, figsize=(14, 7)) # plot wh# ax[0].hist(wh[wh[:, 0]<100, 0],400)# ax[1].hist(wh[wh[:, 1]<100, 1],400)# fig.savefig('wh.png', dpi=200)# Evolvef, sh, mp, s = anchor_fitness(k), k.shape, 0.9, 0.1 # fitness, generations, mutation prob, sigmapbar = tqdm(range(gen), bar_format='{l_bar}{bar:10}{r_bar}{bar:-10b}') # progress barfor _ in pbar:v = np.ones(sh)while (v == 1).all(): # mutate until a change occurs (prevent duplicates)v = ((npr.random(sh) < mp) * random.random() * npr.randn(*sh) * s + 1).clip(0.3, 3.0)kg = (k.copy() * v).clip(min=2.0)fg = anchor_fitness(kg)if fg > f:f, k = fg, kg.copy()pbar.desc = f'{PREFIX}Evolving anchors with Genetic Algorithm: fitness = {f:.4f}'if verbose:print_results(k, verbose)return print_results(k)
对 kmean_anchors()函数中的参数做一下简单解释(代码中已经有了英文注释):
- path:包含数据集文件路径等相关信息的 yaml 文件(比如 coco128.yaml), 或者 数据集张量(yolov5 自动计算锚定框时就是用的这种方式,先把数据集标签信息读取再处理) n:锚定框的数量,即有几组;默认值是9
- img_size:图像尺寸。计算数据集样本标签框的宽高比时,是需要缩放到 img_size 大小后再计算的;默认值是640
- thr:数据集中标注框宽高比最大阈值,默认是使用 超参文件 hyp.scratch.yaml 中的 “anchor_t”参数值;默认值是4.0;自动计算时,会自动根据你所使用的数据集,来计算合适的阈值。 gen:kmean聚类算法迭代次数,默认值是1000
- verbose:是否打印输出所有计算结果,默认值是true
- 如果你不想自动计算锚定框,可以在 train.py 中设置参数即可:
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
3. 训练前手动计算anchor
-
- 修改./data/xxx.yaml文件:将训练数据路径设为绝对路径
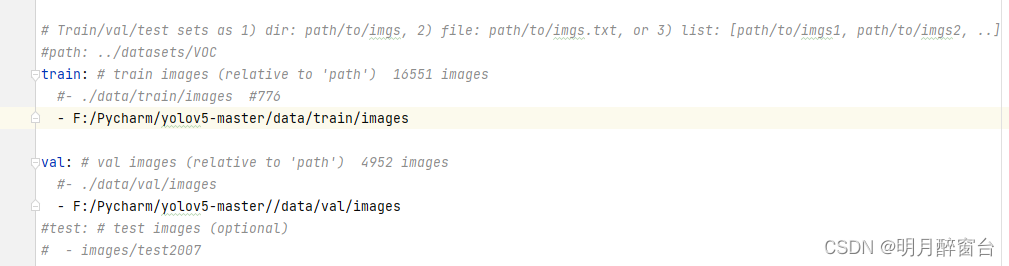
- 修改./data/xxx.yaml文件:将训练数据路径设为绝对路径
-
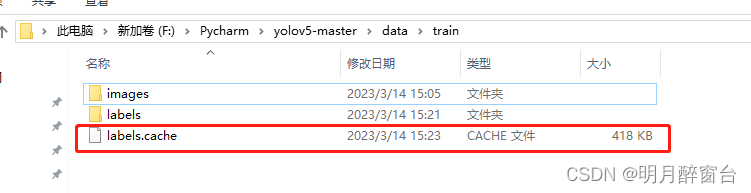
数据集下需包含
.cache文件:
-
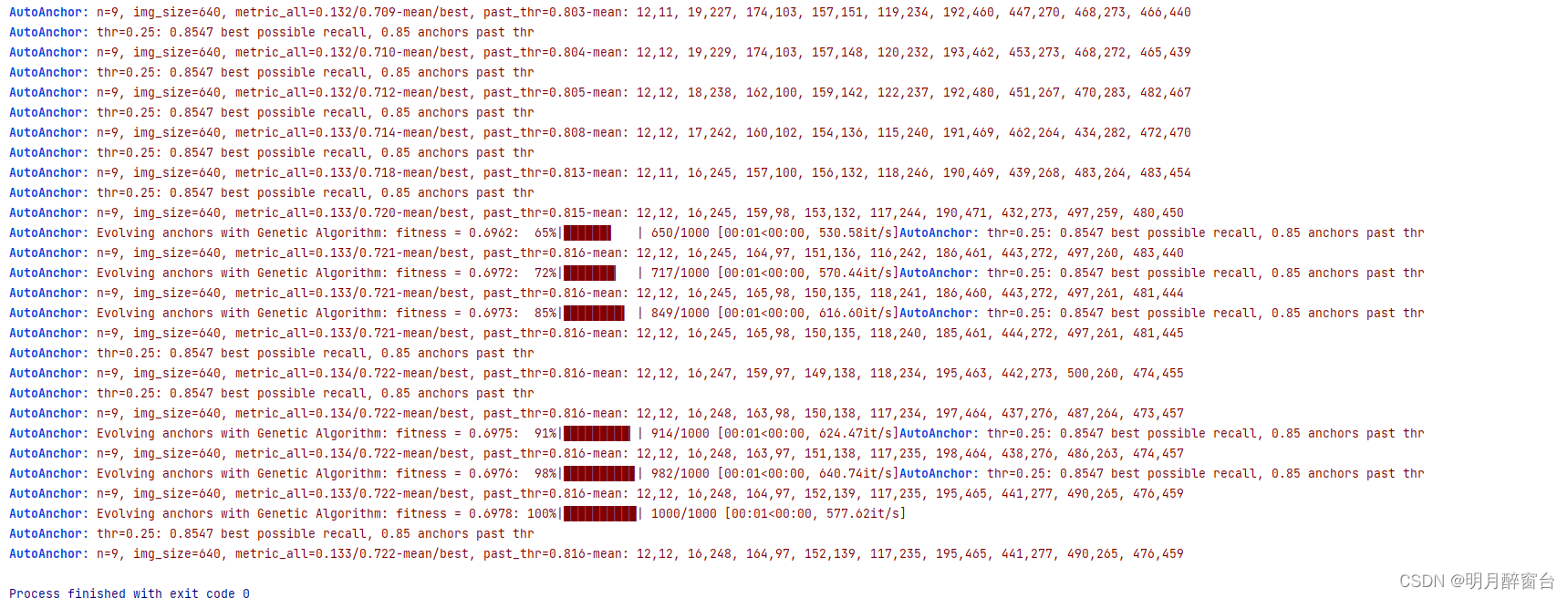
- 调用kmeans算法计算
anchor:
- 调用kmeans算法计算
from utils.autoanchor import *config="../data/xxx.yaml"_=kmean_anchors(config)
输出如下:
- 将最后计算得出的值按顺序修改至模型配置文件
./model/xxx.yaml中,重新训练即可:
4. 检测模块
-
接下来就是anchor在模型中的应用了。这就涉及到了yolo系列目标框回归的过程了。yolov5中的detect模块沿用了v3检测方式,这里就用这种方式来阐述了。
-
- 检测到的不是框,是偏移量:
tx,ty指的是针对所在grid的左上角坐标的偏移量, tw,th指的是相对于anchor的宽高的偏移量,通过如下图的计算方式,得到bx,by,bw,bh就是最终的检测结果。
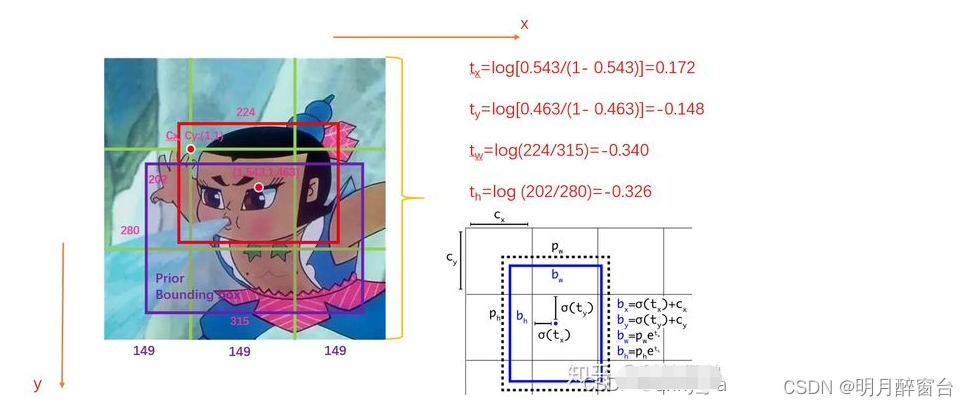
- 检测到的不是框,是偏移量:
-
- 前面经过backbone,neck, head是panet的三个分支,可见特征图size不同,每个特征图分了13个网格,同一尺度的特征图对应了3个anchor,检测了[c,x,y,w,h]和num_class个的one-hot类别标签。3个尺度的特征图,总共就有9个anchor。
参考
1.yolov5 anchors设置详解
2.yolov5的anchor详解
3.YOLOv5的anchor设定
相关文章:
(20)目标检测算法之YOLOv5计算预选框、详解anchor计算
目标检测算法之YOLOv5计算预选框、详解anchor计算 单节段目标检测算法中:预选框的设定直接影响最终的检测精度众所周知,yolov5中采用自适应调整预选框anchor的大小,但万事开头难,配置文件config中的预设还是很重要yolo算法作为on…...
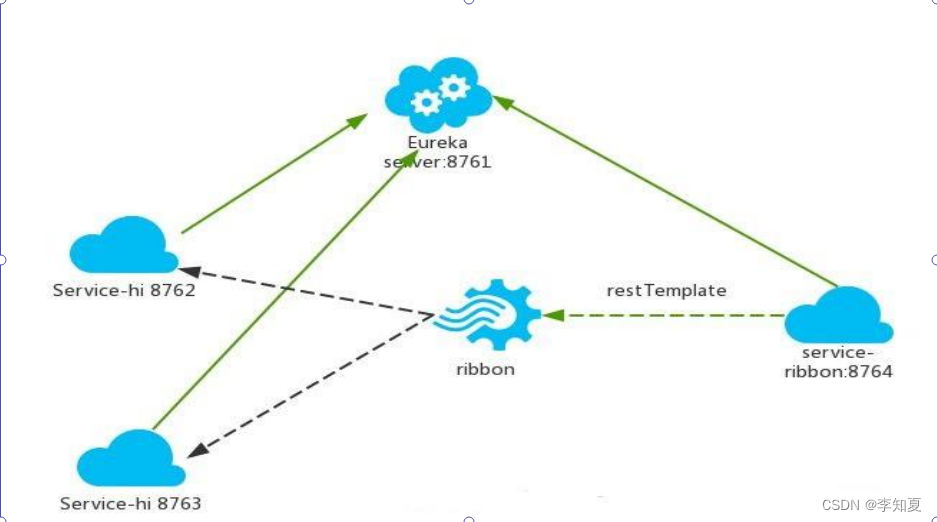
3-1 SpringCloud快速开发入门: Ribbon 是什么
接上一章节Eureka 服务注册中心自我保护机制,这里讲讲Ribbon 是什么 Ribbon 是什么 通常说的负载均衡是指将一个请求均匀地分摊到不同的节点单元上执行,负载均和分为硬件负载均衡和软件负载均衡: **硬件负载均衡:**比如 F5、深信…...
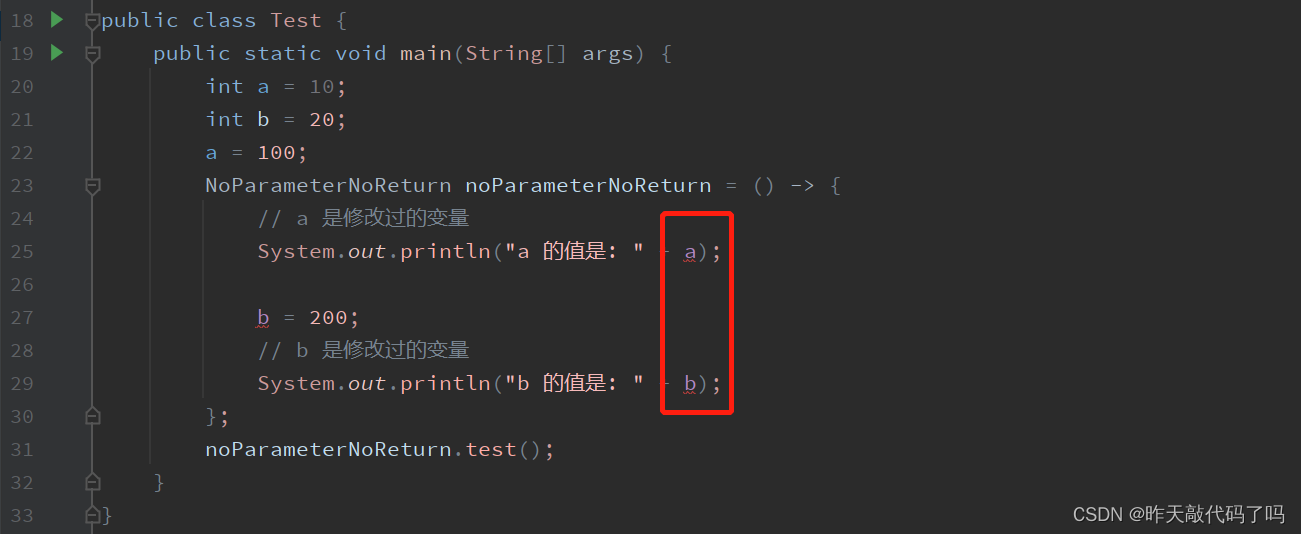
Java【lambda表达式】语法及使用方式介绍
相关文章目录 第一篇: Java【EE初阶】进程相关知识 进程管理 内存管理 文章目录相关文章目录前言一、lambda表达式 是什么?1, lambda表达式 的背景2, 什么是 函数式接口3, lambda表达式 的语法二、lambda表达式 的使用方式1, 无参无返回值2, 有一个参…...
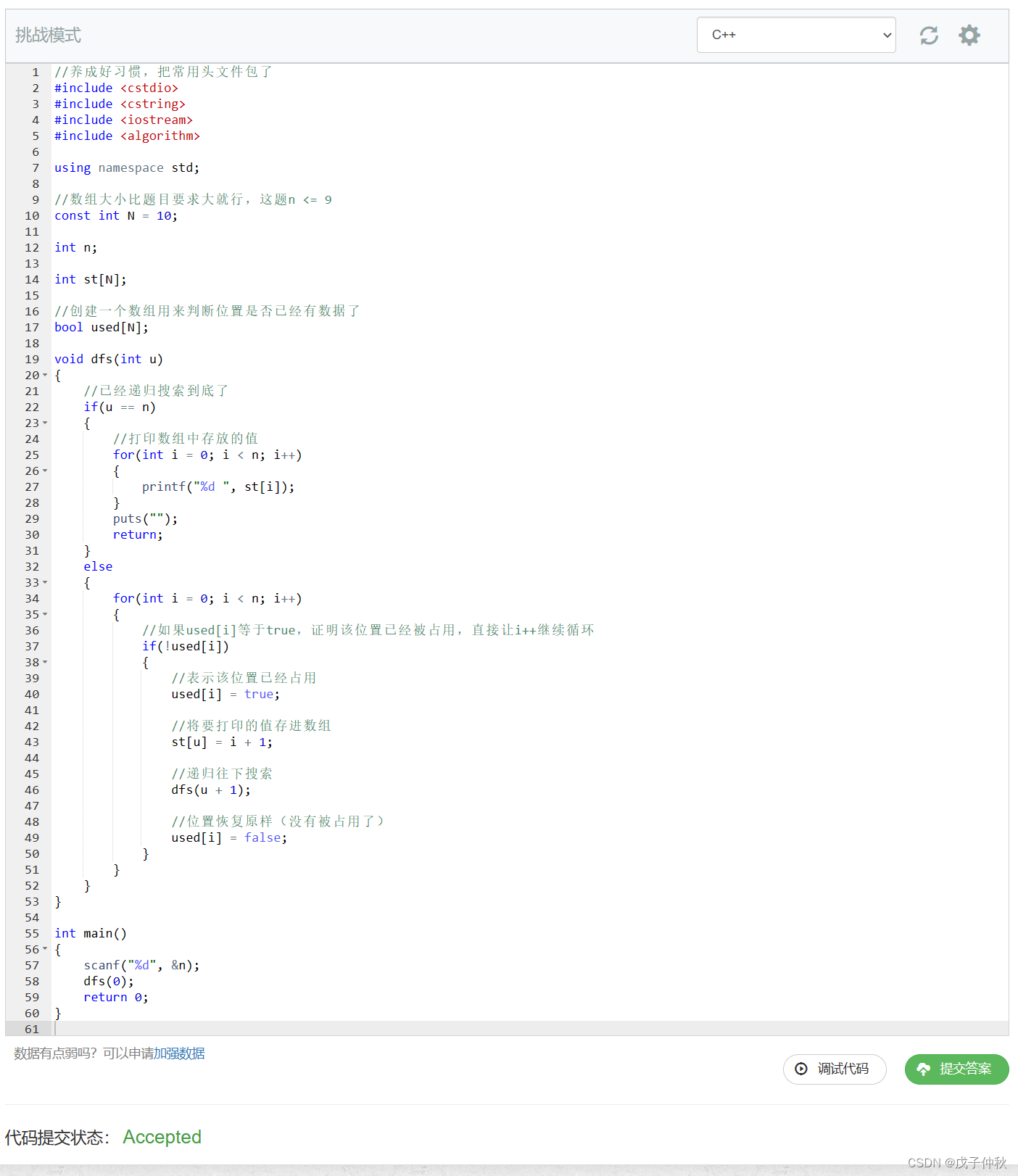
【AcWing】蓝桥杯备赛-深度优先搜索-dfs(2)
目录 写在前面: 题目:94. 递归实现排列型枚举 - AcWing题库 读题: 输入格式: 输出格式: 数据范围: 输入样例: 输出样例: 解题思路: 代码: AC &…...

‘conda‘不是内部或外部命令,也不是可运行的程序或批处理文件。
Anaconda环境搭建常见问题 conda不是内部或外部命令,也不是可运行的程序或批处理文件。 解决方案:配置环境变量 1.找到Anaconda Nvaigator单机右键 2.更多 3.打开文件所在位置 4.继续Anaconda Nvaigator单机右键,更多,选择文件…...
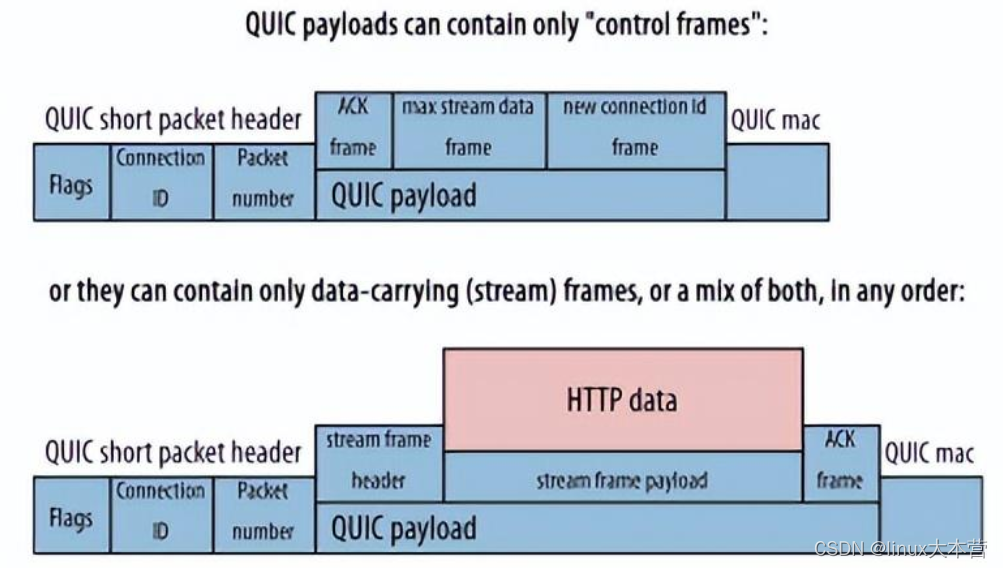
HTTP 3.0来了,UDP取代TCP成为基础协议,TCP究竟输在哪里?
TCP 是 Internet 上使用和部署最广泛的协议之一,多年来一直被视为网络基石,随着HTTP/3正式被标准化,QUIC协议成功“上位”,UDP“取代”TCP成为基础协议,TCP究竟“输”在哪里? HTTP/3 采用了谷歌多年探索的基…...

《JavaCV从入门到实战教程合集》介绍和目录
前言 《JavaCV从入门到实战教程合集》是2016年《JavaCV开发实战教程》和2018年《JavaCV入门教程》2022年《JavaCV音视频实战宝典》三合一汇总合集,完整包含JavaCV入门教程》、《JavaCV开发实战教程》系列和《JavaCV音视频实战宝典》系列所有付费内容。 《JavaCV入…...
Form Generator扩展 文本 组件
一、form-generator是什么?✨ ⭐️ 🌟 form-generator的作者是这样介绍的:Element UI表单设计及代码生成器,可将生成的代码直接运行在基于Element的vue项目中;也可导出JSON表单,使用配套的解析器将JSON解析成真实的表单。 但目前它提供的组件并不能满足我们在项目中的…...

【C/C++】必知必会知识点大总结
✍个人博客:https://blog.csdn.net/Newin2020?spm1011.2415.3001.5343 📚专栏地址:C/C知识点 📣专栏定位:整理一下 C 相关的知识点,供大家学习参考~ ❤️如果有收获的话,欢迎点赞👍…...
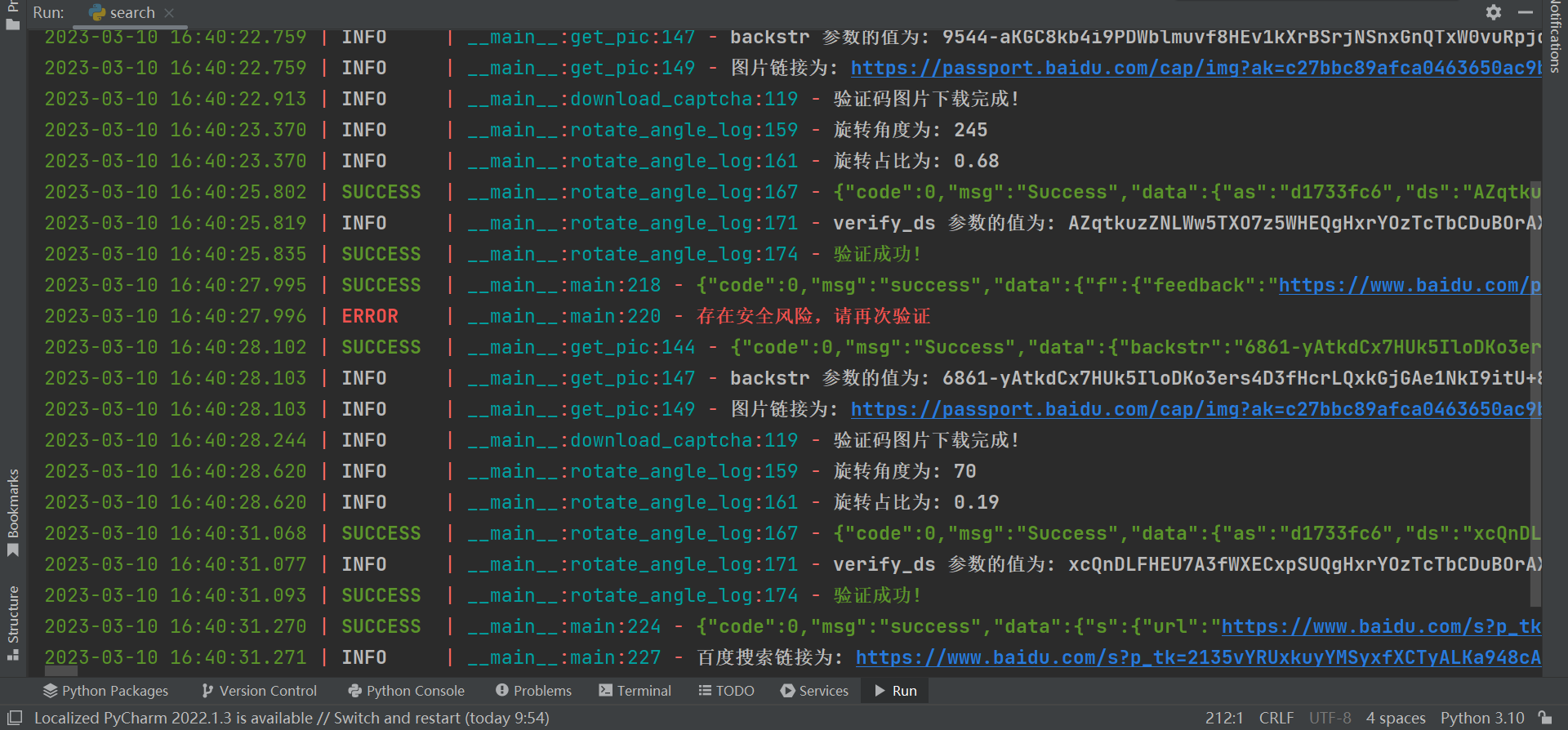
【JavaScript 逆向】百度旋转验证码逆向分析
声明本文章中所有内容仅供学习交流,相关链接做了脱敏处理,若有侵权,请联系我立即删除!案例目标爱企查百度安全验证百度搜索:aHR0cHM6Ly93YXBwYXNzLmJhaWR1LmNvbS9zdGF0aWMvY2FwdGNoYS8以上均做了脱敏处理,B…...
)
PCL 点云投影到直线(C++详细过程版)
目录 一、算法原理二、代码实现三、结果展示1、原始点云2、投影结果一、算法原理 直线方程有三种表示法:一般式、点向式、参数式。PCL中统一采用的是点向式,直线的点向式方程为: x − x 0 m = y −...
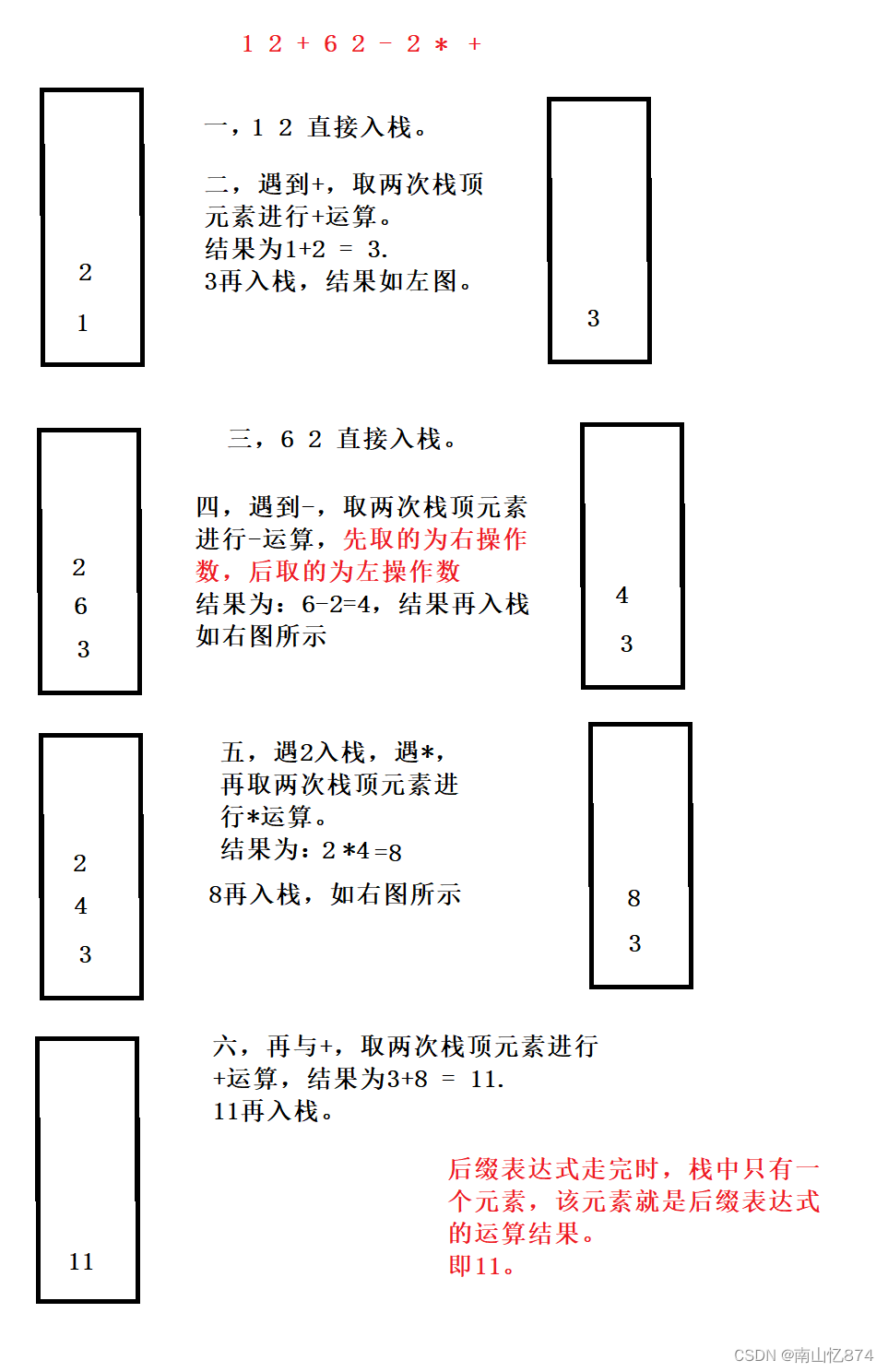
中缀表达式转后缀表示式,及后缀表达式的运算规则
后缀表达式又称为逆波兰表达式 一,中缀表达式如何转后缀表达式 假定给出以下中缀表达式 132*2-1; 要将该表达式转为后缀表达式,我们要按照一定的规则去走,并且用到栈。 先来看规则中缀转后缀的规则: 前提&#x…...

【C++】STL简介
文章目录什么是STLSTL版本 原始版本(HP版本) P.J.版本 RW版本 SGI版本STL六大组件 容器 算法 仿函数 空间配置器 迭代器 配接器STL缺陷什么是STL STL(standard template libaray-标准模板库):是C标准库的重要组成部分,不…...
文件永久存储(上)总结 python文件永久存储(创建打开文件、文件对象的各种方法及含义))
(小甲鱼python)文件永久存储(上)总结 python文件永久存储(创建打开文件、文件对象的各种方法及含义)
一、文件永久存储 如何将数据永久的存放在硬盘上,具体如下。 1.打开文件 定义:往大了讲计算机系统中由操作系统管理的具有名称的存储区域,往小了讲是生活中的PPT、Excel、word三剑客、视频文件、音频文件等。 创建打开文件: open…...

甲酸溶液除钠离子,丙酸溶液除钾离子,医药液体除钾
水是医药行业中用量大、使用 泛的一种原料,它在生产过程中和药剂药品的制备中发挥着极其重要的作用。制药用水的原水通常为自来水或深井水,原水不能直接用作制剂用水或实验用水。因为原水中含有各类盐类和化合物,溶有CO2,还存在大…...
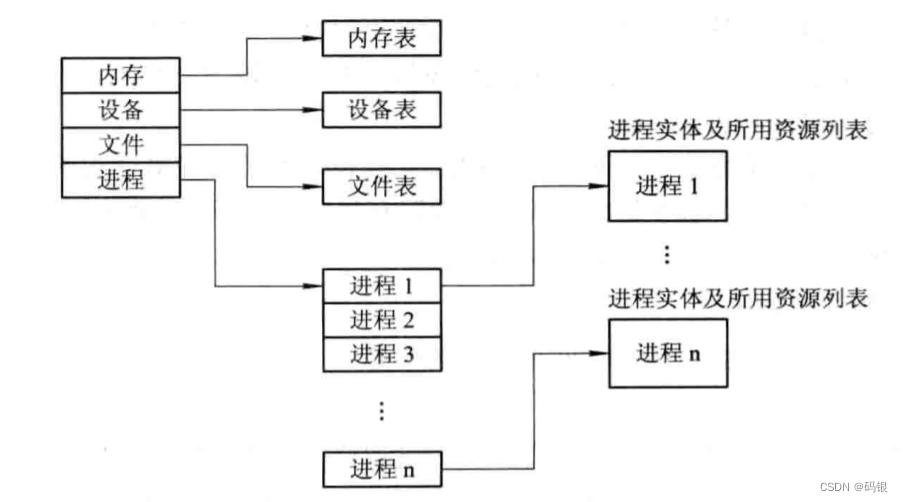
操作系统(2.2)--进程的描述与控制
目录 二、进程的描述 1.进程的定义和特征 1.1进程的定义 1.2进程的特征 2.进程的基本状态及转换 2.1进程的三种基本状态 2.2 三种基本状态的转换 2.3创建状态和中止状态 3.挂起操作和进程状态的转换 3.1 挂起状态的引入 3.2 引入挂起操作后三个进程状态的转换 …...

Python连接es笔记四之创建和删除操作
这一篇笔记介绍一下索引和数据的创建和删除。 其实对于索引来说,如果可以接触到 kibana 的话,可以很方便的在界面进行操作,这里简单介绍一下如何使用代码来操作索引的创建和删除。 索引的创建和删除操作 使用的还是 es 的连接:…...

字符串填充到指定长度
一、需求 在传输一个文件的时候,传输的是二进制数据,整个数据文件的结构为: 文件名称 文件本身 其中文件名称固定占30个byte,存在的情况就是,有的文件名比较长,有的文件名比较短,所有要补足30…...
macOS虚拟机安装全过程(VMware)
作为一名忠实果粉,我最大的愿望就是能够拥有一台Macbook,体验macOS,但是作为学生党,这价钱,贵到离谱啊~~~ 不过,VMware这个神器,可以解决一切问题:既然macOS可以在Macbook上运行&…...
)
第十三届蓝桥杯A组:选数异或——三种解法(线段树、DP、ST表)
[蓝桥杯 2022 省 A] 选数异或 题目描述 给定一个长度为 nnn 的数列 A1,A2,⋯,AnA_{1}, A_{2}, \cdots, A_{n}A1,A2,⋯,An 和一个非负整数 xxx, 给定 mmm 次查询, 每次询问能否从某个区间 [l,r][l, r][l,r] 中选择两个数使得他们的异或等于 xxx 。 输入格式 输入的第一…...

AI智能体编排平台:从任务自动化到生态协作的架构与实践
1. 项目概述:一个面向AI编排与技能提升的生态协作平台最近在和一些做AI应用开发的朋友聊天,大家普遍有个痛点:现在AI工具和模型太多了,从大语言模型到图像生成,再到各种自动化脚本,每个都很强大,…...

全域态势数字孪生,筑牢楼宇长效安全透明防护屏障
全域态势数字孪生,筑牢楼宇长效安全透明防护屏障副标题:全要素三维动态实时复刻楼宇实景,依托无感全域人员感知、多机位跨镜联动追踪、身体指纹唯一身份归档,异常行为、区域滞留、安全隐患提前透明预警处置一、方案概述伴随城市高…...

基于Claude API构建AI代码生成工具:从API封装到工程化实践
1. 项目概述与核心价值最近在开发者社区里,一个名为ashish200729/claude-code-source-code的项目标题引起了不小的讨论。乍一看,这个标题很容易让人产生误解,以为这是某个知名AI模型的源代码被公开了。但作为一名在软件开发和开源领域摸爬滚打…...

蜘蛛池技术解析:网站收录提速的关键工具与运营策略
在搜索引擎优化领域,蜘蛛池是助力网站收录提速的重要辅助工具,尤其适配新站、低权重站或海量内容站,能有效破解收录慢、收录少、深层页面难抓取等痛点。本文从技术原理、核心价值、搭建要点及合规运营策略四方面,全面解析蜘蛛池的…...

CI/CD安全最佳实践:保护软件交付流程
CI/CD安全最佳实践:保护软件交付流程 一、CI/CD安全最佳实践概述 1.1 CI/CD安全最佳实践的定义 CI/CD安全最佳实践是指在持续集成和持续部署流程中实施的安全策略和措施。它涵盖代码提交、构建、测试、部署等各个阶段的安全防护。 1.2 CI/CD安全最佳实践的价值 安全…...

MPLAB代码配置器实战:图形化配置PIC/AVR单片机外设,提升开发效率
1. 项目概述:为什么你需要关注MPLAB代码配置器如果你正在使用Microchip的PIC或AVR单片机,并且还在手动编写外设初始化代码、一遍遍翻阅数据手册核对寄存器位,那今天聊的这个工具,可能会让你有种“相见恨晚”的感觉。我说的就是MPL…...

DeepMind Lab:强化学习研究的3D视觉仿真平台搭建与实战指南
1. 项目概述:一个被低估的强化学习研究“健身房”如果你在深度强化学习(Deep Reinforcement Learning, DRL)这个圈子里待过一段时间,或者正试图入门,那么你大概率听说过OpenAI的Gym、Unity的ML-Agents,甚至…...

【Clickhouse从入门到精通】第08篇:揭秘ClickHouse为何如此之快——五大设计哲学
上一篇【第07篇】ClickHouse执行引擎架构——Parser、Interpreter与Function体系 下一篇【第09篇】ClickHouse安装部署全攻略——从环境准备到服务启动 摘要 ClickHouse能在十亿行级别数据的聚合查询中实现毫秒级响应,绝非偶然。这种极致性能的背后,是一…...

Noto Emoji字体架构深度解析:现代表情符号渲染的技术实现与性能优化
Noto Emoji字体架构深度解析:现代表情符号渲染的技术实现与性能优化 【免费下载链接】noto-emoji Noto Emoji fonts 项目地址: https://gitcode.com/gh_mirrors/no/noto-emoji Noto Emoji作为Google开源的表情符号字体库,提供了跨平台的Unicode表…...

解密ComfyUI-WanVideoWrapper:在ComfyUI中突破AI视频生成的技术壁垒
解密ComfyUI-WanVideoWrapper:在ComfyUI中突破AI视频生成的技术壁垒 【免费下载链接】ComfyUI-WanVideoWrapper 项目地址: https://gitcode.com/GitHub_Trending/co/ComfyUI-WanVideoWrapper 你是否曾想过将脑海中的创意场景转化为生动的视频内容࿰…...