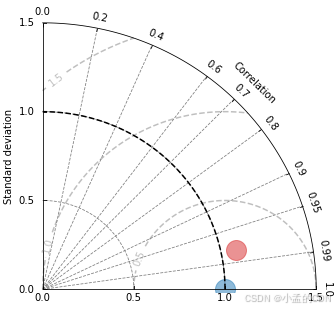
泰勒雷达图2
matplotlib绘制泰勒雷达图
import matplotlib.pyplot as plt
import numpy as np
from numpy.core.fromnumeric import shape
import pandas as pd
import dask.dataframe as dd
from matplotlib.projections import PolarAxes
import mpl_toolkits.axisartist.floating_axes as FA
import mpl_toolkits.axisartist.grid_finder as GF
from matplotlib.transforms import Affine2Dclass TaylorDiagram:"""ref: pandas.DataFrame one columnsamples: pandas.DataFrame multiple columns"""def __init__(self, ax, ref, samples, Normalize=False, markers=[], colors=[], scale=1.2, ms=10, pkwargs={}):self.points = []self.Normalize = Normalizeself.pkwargs = pkwargsself.markers = markers if len(markers) else ['o', 'o', 's', 'v', 'o', 's', 'v'] * 100self.colors = colors if len(colors) else ['tab:blue', 'tab:red', 'tab:red', 'tab:red', 'tab:green', 'tab:green', 'tab:green', '#1abc9c', '#2ecc71', '#3498db', '#9b59b6', '#34495e']self.ms = msself.ref = refself.scale = scaleself.samples = samplesself.fig = plt.gcf() # get current figureself.step_up(ax) # set up a diagram axesself.plot_sample() # draw sample points# self.add_legend() # add legenddef calc_loc(self, x, y):# x为参考数据,y为评估数据# theta为弧度;r为半径R = x.corr(other=y, method='pearson')theta = np.arccos(R)r = y.std()return theta, r / self._refstd if self.Normalize else rdef step_up(self, ax):# close the original axisax.axis('off')ll, bb, ww, hh = ax.get_position().bounds# polar transformtr = PolarAxes.PolarTransform()# theta rangeRlocs = np.array([0, 0.2, 0.4, 0.6, 0.7, 0.8, 0.9, 0.95, 0.99, 1])Tlocs = np.arccos(Rlocs) # convrt to theta locations# grid findergl1 = GF.FixedLocator(Tlocs) # theta locatortf1 = GF.DictFormatter(dict(zip(Tlocs, map(str, Rlocs)))) # theta formatter# std rangeself._refstd = self.ref.std()self.stdmax = max([self.samples[col].std() for col in self.samples.columns] + [self._refstd])self.Smax = (1 if self.Normalize else self.stdmax)* self.scaleself.refstd = 1 if self.Normalize else self._refstdSlocs = np.linspace(0, self.Smax, 4)gl2 = GF.FixedLocator(Slocs) # theta locatortf2 = GF.DictFormatter(dict(zip(Slocs, map(lambda i: '%.1f' % i, Slocs)))) # theta formatter# construct grid helpergrid_helper = FA.GridHelperCurveLinear(tr, extremes=(0, np.pi / 2, 0, self.Smax),grid_locator1=gl1, tick_formatter1=tf1,grid_locator2=gl2, tick_formatter2=tf2,)ax = self.fig.add_axes([ll, bb, ww, hh], facecolor='none', axes_class=FA.FloatingAxes, grid_helper=grid_helper)# thetaax.axis["top"].set_axis_direction("bottom")ax.axis["top"].toggle(ticklabels=True, label=True)ax.axis["top"].major_ticklabels.set_axis_direction("top")ax.axis["top"].label.set_axis_direction("top")ax.axis["top"].label.set_text("Correlation")ax.axis["top"].major_ticklabels.set_pad(8)# std leftax.axis["left"].set_axis_direction("bottom")ax.axis["left"].toggle(ticklabels=True)# std bottomax.axis["right"].set_axis_direction("top")ax.axis["right"].toggle(ticklabels=True, label=True)ax.axis["right"].label.set_text("Standard deviation")ax.axis["right"].major_ticklabels.set_axis_direction("left")ax.axis["right"].major_ticklabels.set_pad(8)# hideax.axis['bottom'].set_visible(False)# draw gridax.grid(linestyle='--', color='gray')self._ax = axself.ax = ax.get_aux_axes(tr)# STD线t = np.linspace(0, np.pi/2)r = np.zeros_like(t) + self.refstdself.ax.plot(t, r, 'k--')# RMS格网rs, ts = np.meshgrid(np.linspace(0, self.Smax, 100), np.linspace(0, np.pi/2, 100))rms = (self.refstd**2 + rs**2 - 2*self.refstd*rs*np.cos(ts))**0.5contours = self.ax.contour(ts, rs, rms, levels=np.linspace(0, self.scale, 4) if self.Normalize else 4,colors='gray', linestyles='--', alpha=.5)self.ax.clabel(contours, contours.levels, inline=True, fmt='%.1f', fontsize=10)# 绘制参考点p, = self.ax.plot(0, self.refstd, linestyle='', marker=self.markers[0], color=self.colors[0],markersize=self.ms, alpha=0.5, **self.pkwargs)p.set_label(self.ref.name)p.set_clip_on(True) # reference点不被裁剪self.points.append(p)def plot_sample(self):stds = []for col, marker, color in zip(self.samples.columns, self.markers[1:], self.colors[1:]):t, s = self.calc_loc(self.ref, self.samples[col])p, = self.ax.plot(t, s, linestyle='', marker=marker, color=color, markersize=self.ms, alpha=.5, **self.pkwargs)p.set_label(col)self.points.append(p)stds.append(s)self.ax.set_xlim(xmax=max(stds))def add_legend(self):ll, bb, ww, hh = self.ax.get_position().boundsself.ax.legend(ncol=len(self.samples) + 1, loc='lower center', frameon=False, bbox_to_anchor=(ll, bb - hh*0.3, ww, hh*0.1))if __name__ == "__main__":print('read data')df =pd.read_csv(r'C:\Users\Administrator\Desktop\123.csv')
# df=pd.DataFrame(df)
# print(df)fig, axes = plt.subplots(1, 1, figsize=(5, 5))td = TaylorDiagram(axes,df.iloc[:, 0], df.iloc[:,1:], ms=20, Normalize=True, scale=1.5)plt.show()
相关文章:
泰勒雷达图2
matplotlib绘制泰勒雷达图 import matplotlib.pyplot as plt import numpy as np from numpy.core.fromnumeric import shape import pandas as pd import dask.dataframe as dd from matplotlib.projections import PolarAxes import mpl_toolkits.axisartist.floating_axes a…...

数据库容灾 | MySQL MGR与阿里云PolarDB-X Paxos的深度对比
开源生态 众所周知,MySQL主备库(两节点)一般通过异步复制、半同步复制(Semi-Sync)来实现数据高可用,但主备架构在机房网络故障、主机hang住等异常场景下,HA切换后大概率就会出现数据不一致的问…...

react根据后端返回数据动态添加路由
以下代码都为部分核心代码 一.根据不同的登录用户,返回不同的权限列表 ,以下是三种不同用户限权列表 const pression { //超级管理员BigAdmin: [{key: "screen",icon: "FileOutlined",label: "数据图表",},{key: "…...

机器学习中的可解释性
「AI秘籍」系列课程: 人工智能应用数学基础 人工智能Python基础 人工智能基础核心知识 人工智能BI核心知识 人工智能CV核心知识 为什么我们需要了解模型如何进行预测 我们是否应该始终信任表现良好的模型?模型可能会拒绝你的抵押贷款申请或诊断你患…...

上海慕尼黑电子展开展,启明智显携物联网前沿方案亮相
随着科技创新的浪潮不断涌来,上海慕尼黑电子展在万众瞩目中盛大开幕。本次展会汇聚了全球顶尖的电子产品与技术解决方案,成为业界瞩目的焦点。启明智显作为物联网彩屏显示领域的佼佼者携产品亮相展会,为参展者带来了RTOS、LINUX全系列方案及A…...

Centos7离线安装ElasticSearch7.4.2
一、官网下载相关的安装包 ElasticSearch7.4.2: elasticsearch-7.4.2-linux-x86_64.tar.gz 下载中文分词器: elasticsearch-analysis-ik-7.4.2.zip 二、上传解压文件到服务器 上传到目录:/home/data/elasticsearch 解压文件࿱…...

深入理解sklearn中的模型参数优化技术
参数优化是机器学习中的关键步骤,它直接影响模型的性能和泛化能力。在sklearn中,参数优化可以通过多种方式实现,包括网格搜索(GridSearchCV)、随机搜索(RandomizedSearchCV)和贝叶斯优化等。本文…...

【Elasticsearch】开源搜索技术的演进与选择:Elasticsearch 与 OpenSearch
开源搜索技术的演进与选择:Elasticsearch 与 OpenSearch 1.历史发展2.OpenSearch 与 Elasticsearch 相同点3.OpenSearch 与 Elasticsearch 不同点3.1 版本大不同3.2 许可证不同3.3 社区不同3.4 功能不同3.5 安全性不同3.6 性能不同3.7 价格不同3.8 两者可相互导入 4…...

欧拉openEuler 22.03 LTS-部署k8sv1.03.1
1.设置ip # vi /etc/sysconfig/network-scripts/ifcfg-ens32 TYPEEthernet PROXY_METHODnone BROWSER_ONLYno BOOTPROTOstatic DEFROUTEyes IPV4_FAILURE_FATALno #IPV6INITyes #IPV6_AUTOCONFyes #IPV6_DEFROUTEyes #IPV6_FAILURE_FATALno #IPV6_ADDR_GEN_MODEeui64 NAMEens1…...

老年生活照护实训室:为养老服务业输送专业人才
本文探讨了老年生活照护实训室在养老服务业专业人才培养中的关键作用。通过详细阐述实训室的功能、教学实践、对学生能力的培养以及面临的挑战和解决方案,强调了其在提升人才素质、满足行业需求方面的重要性,旨在为养老服务业的可持续发展提供有力的人才…...

go语言中使用WaitGroup和channel实现处理多线程问题
WaitGroup 背景 如果将一个任务分为任意个小任务,并且不关心小任务的执行顺序,并且希望等待全部的小任务执行完成后再去操作后面的逻辑,那我推荐你用sync.WaitGRoup 使用方法 比如,有一个任务需要执行 3 个子任务,…...

Open3D 计算点云的平均密度
目录 一、概述 1.1基于领域密度计算原理 1.2应用 二、代码实现 三、实现效果 2.1点云显示 2.2密度计算结果 一、概述 在点云处理中,点的密度通常表示为某个点周围一定区域内的点的数量。高密度区域表示点云较密集,低密度区域表示点云较稀疏。计算…...

C语言之数据在内存中的存储(1),整形与大小端字节序
目录 前言 一、整形数据在内存中的存储 二、大小端字节序 三、大小端字节序的判断 四、字符型数据在内存中的存储 总结 前言 本文主要讲述整型包括字符型是如何在内存中存储的,涉及到大小端字节序这一概念,还有如何判断大小端,希望对大…...
B端全局导航:左侧还是顶部?不是随随便便,有依据在。
一、什么是全局导航 B端系统的全局导航是指在B端系统中的主要导航菜单,它通常位于系统的顶部或左侧,提供了系统中各个模块和功能的入口。全局导航菜单可以帮助用户快速找到和访问系统中的各个功能模块,提高系统的可用性和用户体验。 全局导航…...

什么是海外仓管理自动化?策略及落地实施步骤指南
作为海外仓的管理者,你每天都面临提高海外仓运营效率、降低成本和满足客户需求的问题。海外仓自动化管理技术为这些问题提供了不错的解决思路,不过和任何新技术一样,从策略到落地实施,都有一个对基础逻辑的认识过程。 今天我们整…...
Paint之函数大汇总、ColorMatrix与滤镜效果、setColorFilter)
自定义控件三部曲之绘图篇(六)Paint之函数大汇总、ColorMatrix与滤镜效果、setColorFilter
在自定义控件的绘图篇中,Paint 类是核心的组成部分之一,它控制了在 Canvas 上绘制的内容的各种属性,包括颜色、风格、抗锯齿、透明度等等。下面将详细介绍 Paint 的主要功能以及如何使用 ColorMatrix 和 setColorFilter 来实现滤镜效果。 Pa…...

请写sql满足业务:找到连续登录3天以上的用户
为了找到连续登录超过 3 天的用户,我们可以使用 SQL 窗口函数和递归查询来实现。假设有一个 user_logins 表,包含以下字段: user_id(用户ID)login_date(登录日期) 假设 login_date 是 DATE 类…...

fatal error: apriltag/apriltag.h: No such file or directory 的 参考解决方法
文章目录 写在前面一、问题描述二、解决方法参考链接 写在前面 自己的测试环境: Ubuntu20.04,ROS-Noteic 一、问题描述 自己编译ROS程序的时候遇到如下问题: fatal error: apriltag/apriltag.h: No such file or directory9 | #include &…...

C++继承(一文说懂)
目录 一: 🔥继承的概念及定义1.1 继承的概念1.2 继承定义1.2.1 定义格式1.2.2 继承关系和访问限定符1.2.3 继承基类成员访问方式的变化 二:🔥基类和派生类对象赋值转换三:🔥继承中的作用域四:&a…...

卷积神经网络可视化的探索
文章目录 训练LeNet模型下载FashionMNIST数据训练保存模型 卷积神经网络可视化加载模型一个测试图像不同层对图像处理的可视化第一个卷积层的处理第二个卷积层的处理 卷积神经网络是利用图像空间结构的一种深度学习网络架构,图像在经过卷积层、激活层、池化层、全连…...

Youtu-VL-4B-Instruct基础教程:system message规范写法避免API响应异常
Youtu-VL-4B-Instruct基础教程:system message规范写法避免API响应异常 你是不是在用Youtu-VL-4B-Instruct的API时,偶尔会遇到一些奇怪的响应?比如模型突然不按套路出牌,或者干脆给你返回一些看不懂的内容? 别担心&a…...

对于对话中的用户长期兴趣建模,OpenClaw 的序列推荐方法?
关于对话系统中如何捕捉用户长期兴趣这件事,业内琢磨了挺长时间。传统的序列推荐模型,比如那些基于循环神经网络或者注意力机制的,往往更擅长处理短期的、密集的交互序列。它们像是一个敏锐的现场观察者,能立刻抓住你刚才点击了什…...

Flutter Gradle插件迁移指南:从apply script到声明式plugins的实践
1. 为什么需要迁移到声明式plugins块 最近在维护一个Flutter项目时,我发现每次构建Android端都会弹出一个黄色警告:"You are applying Flutters app_plugin_loader Gradle plugin imperatively using the apply script method..."。这个警告看…...

MAX30102传感器寄存器深度解析与实战配置指南
1. MAX30102传感器核心功能解析 MAX30102是一款集成了红光和红外光LED的光学传感器,专门用于非侵入式心率监测和血氧饱和度(SpO2)测量。这个火柴盒大小的芯片内部藏着精密的模拟前端和数字信号处理单元,能够捕捉到人体脉搏带来的微弱光信号变化。 我第一…...

别再被‘万向死锁’吓到了!一个拧瓶盖的日常例子,5分钟搞懂欧拉角和四元数的区别
从拧瓶盖到游戏开发:用生活常识破解万向死锁之谜 想象一下,你正试图拧开一瓶顽固的矿泉水瓶盖。第一次尝试,你顺时针旋转瓶盖——没动静;于是你调整手腕角度再次尝试,这次瓶盖却意外滑脱了方向。这种日常挫败感&#x…...

让 TDengine 在 JetBrains IDEs 里更像“原生数据库”一点
让 TDengine 在 JetBrains IDEs 里更像“原生数据库”一点 Author: ChangJin Wei (魏昌进) 最近我做了一个小插件,把 TDengine 接入到了 JetBrains IDEs 的数据库工具链里。 先埋个小提示:文末有彩蛋。 项目地址: GitHub: https://github.…...

不会写C代码也能做飞控?手把手教你用Matlab/Simulink和FMT搭建无人机算法模型
零代码飞控开发实战:用Matlab/SimulinkFMT实现无人机算法快速迭代 当无人机行业从极客玩具转向工业级应用时,传统飞控开发模式正面临严峻挑战——某高校研究团队曾花费三个月手工编写PID控制代码,却在首次试飞时因姿态解算模块的数值溢出导致…...
定制MongoDB 4.4.9的完整避坑流程)
告别‘Illegal instruction’:为老旧ARM芯片(如鲲鹏920)定制MongoDB 4.4.9的完整避坑流程
为老旧ARM芯片定制MongoDB 4.4.9的完整避坑指南 当你在国产ARM服务器上部署MongoDB时,是否遇到过Illegal instruction错误?这个问题往往源于硬件与软件版本之间的指令集不匹配。本文将带你深入理解ARM架构的版本差异,并提供一套完整的解决方案…...
)
避坑指南:单相有源逆变电路Simulink仿真中那些教科书没讲的细节(附反电动势设置模板)
单相有源逆变电路Simulink仿真实战:从参数配置到波形调试的工程化指南 第一次在Simulink里搭建单相有源逆变电路时,看着报错窗口弹出的"Algebraic loop detected"提示,我盯着屏幕足足愣了五分钟。教科书上明明写着"连接好器件…...

告别窗口拖拽:用Loop实现Mac高效分屏的5个核心技巧
告别窗口拖拽:用Loop实现Mac高效分屏的5个核心技巧 【免费下载链接】Loop MacOS窗口管理 项目地址: https://gitcode.com/GitHub_Trending/lo/Loop 每天在Mac上工作时,你是否经常被这些问题困扰:窗口太多找不到想要的那个?…...