汽车电子助力转向系统研究
汽车电子助力转向系统研究
摘要
电子助力转向系统(Electric Power Steering,EPS)是一种利用电动机辅助驾驶员进行车辆转向的系统。相比于传统的液压助力转向系统,EPS具有更高的效率、精确性和可控性。本文将详细探讨EPS的工作原理、组成部分、控制策略、优点及其在自动驾驶汽车中的应用。
1. 引言
随着汽车工业的发展,转向系统经历了从机械助力到液压助力再到电子助力的演变。电子助力转向系统(EPS)作为一种先进的转向技术,不仅提高了驾驶的舒适性和安全性,还为自动驾驶技术提供了关键支持。本文旨在介绍EPS系统的设计原理、关键技术及其在现代汽车中的应用。
2. 电子助力转向系统的组成
2.1 基本结构
EPS系统主要由以下几个部分组成:
- **转向传感器(Steering Sensor)**:检测驾驶员的转向输入(如转向角和转向力)。
- **电动助力器(Electric Motor)**:根据传感器信号提供辅助转向力。
- **电子控制单元(Electronic Control Unit,ECU)**:处理传感器数据并控制电动助力器的工作。
- **转向机械装置(Steering Mechanism)**:将转向力传递给车轮,包括转向轴、齿轮齿条机构等。
2.2 传感器
传感器是EPS系统的关键组件之一,常用的传感器包括:
- **转向角传感器**:检测方向盘的转角。
- **转向力矩传感器**:测量方向盘的转向力矩。
3. 工作原理
3.1 信号检测
当驾驶员转动方向盘时,转向角传感器和转向力矩传感器检测相应的转向角度和转向力矩,并将这些信息以电信号的形式传递给ECU。
3.2 信号处理
ECU接收传感器信号后,进行数据处理和分析。根据预设的控制算法,ECU计算出所需的辅助力,并生成控制信号。
3.3 助力控制
电动助力器根据ECU发送的控制信号,产生相应的助力,辅助驾驶员完成转向操作。助力的大小和方向根据驾驶员的输入和行驶状态动态调整。
3.4 反馈机制
EPS系统具有闭环反馈控制功能,实时监测转向状态和助力效果,通过反馈调整确保转向的精确性和稳定性。
4. 控制策略
4.1 基本控制策略
EPS系统的基本控制策略是根据转向力矩和车速调整助力大小。通常在低速时提供较大的助力,在高速时提供较小的助力,以确保驾驶的舒适性和安全性。
4.2 高级控制策略
现代EPS系统引入了多种高级控制策略,如:
- **自适应控制**:根据驾驶员的驾驶风格和道路条件动态调整助力特性。
- **集成稳定控制**:与车身稳定系统(ESP)等集成,增强车辆的稳定性和操控性。
- **路感反馈**:模拟传统机械转向系统的路感,提高驾驶体验。
5. EPS系统的优点
5.1 高效节能
相比于液压助力转向系统,EPS系统不需要发动机提供动力,从而减少了能量消耗,提高了燃油效率。
5.2 精确控制
EPS系统通过电控方式实现精确的助力控制,响应速度快,转向操作更加平顺和精准。
5.3 适应性强
EPS系统可以根据不同车型和驾驶条件进行软件调整,具有很高的适应性。
5.4 安全性高
EPS系统具备自诊断和故障处理功能,能够及时检测并处理系统故障,提高了行车安全性。
6. EPS系统在自动驾驶中的应用
6.1 自动转向控制
在自动驾驶系统中,EPS作为执行机构,可以根据自动驾驶算法的指令实现自动转向控制。
6.2 与其他系统的集成
EPS系统可以与自动驾驶系统中的其他子系统(如路径规划、运动控制等)无缝集成,共同实现车辆的自主驾驶功能。
6.3 冗余设计
为确保自动驾驶系统的安全性,EPS系统通常设计有冗余结构,保障在关键时刻的可靠运行。
7. 结论
电子助力转向系统作为现代汽车中的重要技术,不仅提升了传统车辆的驾驶体验和安全性,还为自动驾驶技术的实现提供了重要支持。随着技术的不断发展,EPS系统将在未来汽车工业中发挥更加重要的作用。
参考文献
- Shimada, K., & Kimura, S. (2010). Electric Power Steering System (EPS). In Advances in Vehicle Control and Safety. Springer.
- Johnson, R. A., & Neale, K. W. (2015). Electric Power Steering: An Advanced Technology for Improved Safety and Comfort. SAE International.
- Thrun, S., Burgard, W., & Fox, D. (2005). Probabilistic Robotics. MIT Press.
- Bosch Automotive Handbook. (2020). Bosch.
相关文章:

汽车电子助力转向系统研究
汽车电子助力转向系统研究 摘要 电子助力转向系统(Electric Power Steering,EPS)是一种利用电动机辅助驾驶员进行车辆转向的系统。相比于传统的液压助力转向系统,EPS具有更高的效率、精确性和可控性。本文将详细探讨EPS的工作原理…...
)
大数据学习之 scala基础(补充)
scala基础: hello world: 写scala可运行文件的注意事项1、如果一个scala文件要运行,class要改成object2、如果是class,就仅单纯代表一个类,如果是object代表的是单例对象3、scala语法中,一句话结束不需要加分号4、sca…...
正向传播和反向传播
正向传播(Forward Propagation) 正向传播是指将输入数据通过神经网络,计算出预测值的过程。具体步骤如下: 输入层:接受输入数据。隐藏层:每个隐藏层中的神经元接收上一层的输出,进行加权求和&…...

前端文件下载的方式
方式一:a标签直接下载 <a href"链接" >下载</a>一个文件链接(一般是服务器上的某个文件),这个链接一般地址栏输入是预览,不是附件下载 如果想改成附件下载,以下两种方式任选一个均…...

视图库对接系列(GA-T 1400)十六、视图库对接系列(本级)通知(订阅回调)
说明 之前我们实现了订阅接口,其中有一个receiveAddr参数, 这个就是对应的回调的地址。一般情况下对应的是同一个服务。 我们推荐使用http://xxx:xxx/VIID/SubscribeNotifications接口文档 SubscribeNotificationList对象对象如下: 文档中是xml,但实际上目前使用的都是jso…...

Python | Leetcode Python题解之第230题二叉搜索树中第K小的元素
题目: 题解: class AVL:"""平衡二叉搜索树(AVL树):允许重复值"""class Node:"""平衡二叉搜索树结点"""__slots__ ("val", "parent&quo…...

Python酷库之旅-第三方库Pandas(018)
目录 一、用法精讲 44、pandas.crosstab函数 44-1、语法 44-2、参数 44-3、功能 44-4、返回值 44-5、说明 44-6、用法 44-6-1、数据准备 44-6-2、代码示例 44-6-3、结果输出 45、pandas.cut函数 45-1、语法 45-2、参数 45-3、功能 45-4、返回值 45-5、说明 4…...

九科bit-Worker RPA 内容学习
入门阶段, 花时间学习和记忆细枝末节,可能会反而分散新手去理解核心逻辑的精力,并且不常用的知识也很容易被遗忘。 简介: 什么是RPA? RPA(Robotic Process Automation,机器人流程自动化&#x…...

vscode编译环境配置-golang
1. 支持跳转 如果单测函数上方不显示run test | debug test,需要安装Code Debugger(因为以前的go Test Explorer不再被维护了) 2. 单测 指定单个用例测试 go test -v run TestXXXdlv 调试 需要安装匹配的go版本和delve版本(如…...

【JavaEE】网络编程——UDP
🤡🤡🤡个人主页🤡🤡🤡 🤡🤡🤡JavaEE专栏🤡🤡🤡 文章目录 1.数据报套接字(UDP)1.1特点1.2编码1.2.1DatagramSocket1.2.2DatagramPacket…...

JAVA毕业设计147—基于Java+Springboot的手机维修管理系统(源代码+数据库)
基于JavaSpringboot的手机维修管理系统(源代码数据库)147 一、系统介绍 本项目分为用户、管理员、维修员三种角色 1、用户: 注册、登录、新闻公告、售后申请、申请列表、意见反馈、个人信息、密码修改 2、管理员: 用户管理、用户管理、栏目管理、网…...

力扣第228题“汇总区间”
在本篇文章中,我们将详细解读力扣第228题“汇总区间”。通过学习本篇文章,读者将掌握如何遍历和汇总区间,并了解相关的复杂度分析和模拟面试问答。每种方法都将配以详细的解释,以便于理解。 问题描述 力扣第228题“汇总区间”描…...

部署大语言模型并对话
在阿里云的https://developer.aliyun.com/adc/scenario/b105013328814fe995c0f091d708d67d 选择函数计算 设置服务器配置 复制公网地址 这个地址不能直接 在返回应用,创建应用LLM 对话页面 Open WebUI 点击下面的创建应用 部署完成后访问域名 打开访问地址...

WebSocket、socket.io-client
WebSocket WebSocket 是一种网络通信协议,它提供了一个在单个长期持久的 TCP 连接上进行全双工(full-duplex)通信的通道。 WebSocket 允许客户端和服务器之间进行双向的数据交换,这意味着服务器可以主动向客户端推送数据&#x…...

Maven 仓库
在 Maven 世界中,任何一个依赖、插件或者项目构建的输出,都可以称为 构件 。 坐标和依赖是构件在 Maven 世界中的逻辑表示方式,构件的物理表示方式是文件,Maven 通过仓库来统一管理这些文件。 任何一个构件都有一组坐标唯一标识。…...
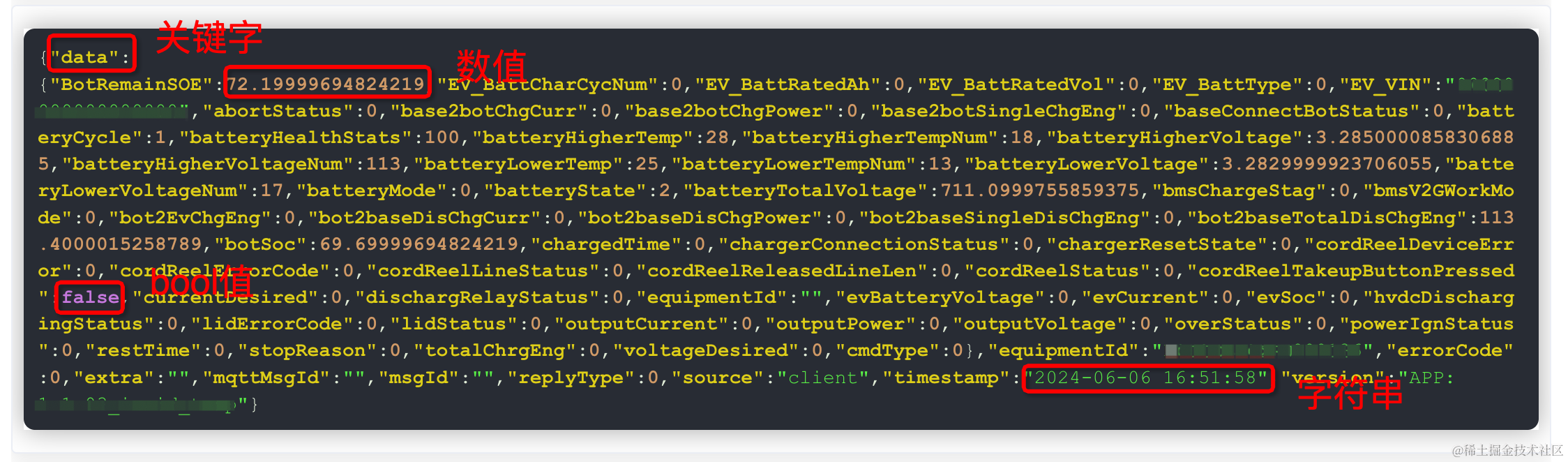
给后台写了一个优雅的自定义风格的数据日志上报页面
highlight: atelier-cave-dark 查看后台数据日志是非常常见的场景,经常看到后台的小伙伴从服务器日志复制一段json数据字符串,然后找一个JSON工具网页打开,在线JSON格式化校验。有的时候,一些业务需要展示mqtt或者socket的实时信息展示,如果不做任何修改直接展示一串字符…...

【React Native优质开源项目】
🌈个人主页: 程序员不想敲代码啊 🏆CSDN优质创作者,CSDN实力新星,CSDN博客专家 👍点赞⭐评论⭐收藏 🤝希望本文对您有所裨益,如有不足之处,欢迎在评论区提出指正,让我们共…...

Android 自动更新时间的数字时钟 TextClock
TextClock 继承 TextView ,使用方法和 TextView 一样。 它专门用于显示数字时钟,可以自定义显示格式。 只要在布局文件里添加,它会自动更新时间,不需要添加刷新逻辑。 布局文件, <?xml version"1.0"…...

【Linux Git入门】Git的介绍
文章目录 前言git简介git是什么git的作用为什么要学习git安装git总结前言 在现代软件开发中,版本控制系统已经成为了不可或缺的工具。其中,Git是最受欢迎的版本控制系统之一。Git是由Linux的创造者Linus Torvalds在2005年创建的,用于管理Linux内核的开发。Git是一个分布式版…...
)
kafka面试题(基础-进阶-高阶)
目录 Kafka 基础篇 1.Kafka 的用途有哪些?使用场景如何? 2.Kafka 中的ISR、AR 又代表什么?ISR 的伸缩又指什么 3.Kafka 中的 HW、LEO、LSO、LW 等分别代表什么? 4.Kafka 中是怎么体现消息顺序性的? 5.Kafka 中的分区器、序列化器、拦截器是否了解?它们之间的处理顺序…...
XUnity Auto Translator:如何用智能翻译插件打破游戏语言壁垒?
XUnity Auto Translator:如何用智能翻译插件打破游戏语言壁垒? 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 你是否曾经因为语言障碍而错过了精彩的日本视觉小说或欧美独立游戏&…...

数字孪生赋能设备预测性维护:构建工业设备全生命周期智能运维新模式
在智能制造加速推进的今天,工业设备作为生产体系的核心资产,其稳定运行直接决定着企业的生产效率、产品质量与经济效益。但据行业统计,全球制造业每年因设备非计划停机造成的损失超过 5000 亿美元,单台关键设备每分钟停机损失可达…...

还在熬夜调地图?让AI替你干
你还在为地图开发熬夜吗? "这个标注位置怎么不对?" "图层叠加出问题了,谁来看看?" "地图加载太慢,客户在催……" 每次做地图相关项目,开发者群里总是一片哀嚎。查文档、…...

Serverless多事件触发器:提升FaaS效率的关键技术
1. Serverless计算中的多事件触发器:突破传统FaaS的局限在当今云原生架构中,Serverless计算已成为构建弹性应用的重要范式。作为其核心组件的函数即服务(FaaS)平台,如AWS Lambda和Google Cloud Functions,通过事件驱动机制实现了资…...

Linux 环境变量详解及实例
Linux环境变量 1 ~/.bash_profile && ~/.bashrc 用户登陆Linux操作系统的时候,"/etc/profile", "~/.bash_profile"等配置文件会被自动执行。 执行过程是这样的: 登陆Linux系统时,首先启动"/etc/profil…...

Claude Desktop for Linux桌面集成:.desktop文件与MIME类型配置
Claude Desktop for Linux桌面集成:.desktop文件与MIME类型配置 【免费下载链接】claude-desktop-debian Claude Desktop for Linux 项目地址: https://gitcode.com/GitHub_Trending/cl/claude-desktop-debian Claude Desktop for Linux是一款强大的桌面应用…...
)
编译和链接(以Windows,VS环境下C语言为例)
编译和链接(以Windows,VS环境下C语言为例)一.什么是翻译环境和运行环境?二.翻译环境2.1预处理(预编译)2.2编译2.2.1词法分析2.2.2语法分析2.2.3语义分析2.3汇编2.4链接三.运行环境提前说明一下,虽然说我们是以Windows操作系统为例,…...

Cortex-M3/M4处理器模式判断与调试技巧
1. Cortex-M3/M4处理器模式判断原理在嵌入式开发中,理解Cortex-M3和Cortex-M4处理器的运行模式对调试和异常处理至关重要。这两种处理器架构都采用了两级特权等级和两种执行模式的组合设计:特权等级(Privilege Level):…...

通过curl命令快速测试Taotoken平台API连通性与模型列表
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令快速测试Taotoken平台API连通性与模型列表 基础教程类,本文面向需要快速验证环境或进行排错的开发者&…...

千问 LeetCode 2569. 更新数组后处理求和查询 TypeScript实现
这道题的核心是高效维护 nums1 的区间反转操作,因为数据规模达到 10^5,暴力反转会超时。下面给出 TypeScript 实现,采用线段树 懒标记的方案。function handleQuery(nums1: number[], nums2: number[], queries: number[][]): number[] {con…...