使用机器学习 最近邻算法(Nearest Neighbors)进行点云分析 (scikit-learn Open3D numpy)
使用 NearestNeighbors 进行点云分析
在数据分析和机器学习领域,最近邻算法(Nearest Neighbors)是一种常用的非参数方法。它广泛应用于分类、回归和聚类分析等任务。下面将介绍如何使用 scikit-learn 库中的 NearestNeighbors 类来进行点云数据的处理,并通过 Open3D 库进行可视化展示。

最近邻算法简介
最近邻算法是一种基于距离的算法,它通过计算数据点之间的距离来查找给定数据点的最近邻居。常用的距离度量包括欧氏距离、曼哈顿距离和余弦相似度等。最近邻算法的优点在于简单易懂且无需假设数据的分布形式,适用于各种类型的数据。
代码示例
使用 NearestNeighbors 查找点云数据的最近邻,并使用 Open3D 进行可视化。

步骤一:导入必要的库
import open3d as o3d
import numpy as np
from sklearn.neighbors import NearestNeighbors
import time
步骤二:定义函数来创建点与点之间的连接线
def create_lines_from_points(points, k_neighbors=6, color=[0, 1, 0]):if len(points) < 2:return Nonestart_time = time.time()neighbors = NearestNeighbors(n_neighbors=k_neighbors)neighbors.fit(points)distances, indices = neighbors.kneighbors(points)end_time = time.time()print(f"Nearest neighbors computation time: {end_time - start_time:.4f} seconds")start_time = time.time()lines = []for i in range(len(points)):for j in indices[i]:if i < j: # 避免重复的线lines.append([i, j])end_time = time.time()print(f"Line creation time: {end_time - start_time:.4f} seconds")colors = [color for i in range(len(lines))]line_set = o3d.geometry.LineSet()line_set.points = o3d.utility.Vector3dVector(points)line_set.lines = o3d.utility.Vector2iVector(lines)line_set.colors = o3d.utility.Vector3dVector(colors)return line_set
步骤三:加载点云数据
使用点云数据文件 .pcd 的内容。
pcd_file = """\
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 28
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 28
DATA ascii
0.301945 -0.1810271 1.407832
0.3025161 -0.1733161 1.322455
0.3003909 -0.167791 1.717239
0.2926154 -0.1333728 1.246899
0.2981626 -0.1311488 1.376031
0.300947 -0.1268353 1.719725
0.2944916 -0.1170874 1.545582
0.3008177 -0.09701672 1.395218
0.2989618 -0.08497152 1.699149
0.3039065 -0.07092351 1.32867
0.3031552 -0.05290076 1.509094
0.2906472 0.02252534 1.617192
0.2972519 0.02116165 1.457043
0.3024158 0.02067187 1.402361
0.2987708 0.01975626 1.286629
0.3014581 0.06462696 1.304869
0.289153 0.1107126 1.859879
0.2879259 0.1625713 1.583842
0.2952633 0.1989845 1.431798
0.3078183 -0.1622952 1.816048
0.3001072 -0.147239 1.970708
0.2990342 -0.1194922 1.950798
0.2979593 -0.09225944 1.931052
0.2929263 0.02492997 1.965327
0.3061717 0.1117098 1.621875
0.3004842 0.03407142 1.999085
0.3023082 -0.1527775 1.553968
0.3008434 0.250506 1.55337
"""# 解析点云数据
lines = pcd_file.strip().split("\n")
points = []
for line in lines[11:]:points.append([float(value) for value in line.split()])
points = np.array(points)
步骤四:创建连接线并进行可视化
# 创建连接线并进行可视化
line_set = create_lines_from_points(points, k_neighbors=6, color=[0, 1, 0])
o3d.visualization.draw_geometries([line_set])
结论
以上展示了如何使用 scikit-learn 中的 NearestNeighbors 类来计算点云数据的最近邻,并使用 Open3D 库将结果进行可视化。这种方法可以用于点云数据的分析、物体检测以及3D建模等多个领域。
完整代码
import open3d as o3d
import numpy as np
from sklearn.neighbors import NearestNeighbors
import timedef create_lines_from_points(points, k_neighbors=6, color=[0, 1, 0]):if len(points) < 2:return Nonestart_time = time.time()neighbors = NearestNeighbors(n_neighbors=k_neighbors)neighbors.fit(points)distances, indices = neighbors.kneighbors(points)end_time = time.time()print(f"Nearest neighbors computation time: {end_time - start_time:.4f} seconds")start_time = time.time()lines = []for i in range(len(points)):for j in indices[i]:if i < j: # avoid duplicate lineslines.append([i, j])end_time = time.time()print(f"Line creation time: {end_time - start_time:.4f} seconds")colors = [color for i in range(len(lines))]line_set = o3d.geometry.LineSet()line_set.points = o3d.utility.Vector3dVector(points)line_set.lines = o3d.utility.Vector2iVector(lines)line_set.colors = o3d.utility.Vector3dVector(colors)return line_set# Load point cloud data from a .pcd file
pcd_file = """\
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 28
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 28
DATA ascii
0.301945 -0.1810271 1.407832
0.3025161 -0.1733161 1.322455
0.3003909 -0.167791 1.717239
0.2926154 -0.1333728 1.246899
0.2981626 -0.1311488 1.376031
0.300947 -0.1268353 1.719725
0.2944916 -0.1170874 1.545582
0.3008177 -0.09701672 1.395218
0.2989618 -0.08497152 1.699149
0.3039065 -0.07092351 1.32867
0.3031552 -0.05290076 1.509094
0.2906472 0.02252534 1.617192
0.2972519 0.02116165 1.457043
0.3024158 0.02067187 1.402361
0.2987708 0.01975626 1.286629
0.3014581 0.06462696 1.304869
0.289153 0.1107126 1.859879
0.2879259 0.1625713 1.583842
0.2952633 0.1989845 1.431798
0.3078183 -0.1622952 1.816048
0.3001072 -0.147239 1.970708
0.2990342 -0.1194922 1.950798
0.2979593 -0.09225944 1.931052
0.2929263 0.02492997 1.965327
0.3061717 0.1117098 1.621875
0.3004842 0.03407142 1.999085
0.3023082 -0.1527775 1.553968
0.3008434 0.250506 1.55337
"""# Parse the point cloud data
lines = pcd_file.strip().split("\n")
points = []
for line in lines[11:]:points.append([float(value) for value in line.split()])
points = np.array(points)# Create lines from points and visualize
line_set = create_lines_from_points(points, k_neighbors=6, color=[0, 1, 0])
o3d.visualization.draw_geometries([line_set])
相关文章:
使用机器学习 最近邻算法(Nearest Neighbors)进行点云分析 (scikit-learn Open3D numpy)
使用 NearestNeighbors 进行点云分析 在数据分析和机器学习领域,最近邻算法(Nearest Neighbors)是一种常用的非参数方法。它广泛应用于分类、回归和聚类分析等任务。下面将介绍如何使用 scikit-learn 库中的 NearestNeighbors 类来进行点云数…...

安装jenkins最新版本初始化配置及使用JDK1.8构建项目详细讲解
导读 1.安装1.1.相关网址1.2.准备环境1.3.下载安装 2. 配置jenkins2.1.安装插件2.2.配置全局工具2.3.系统配置 3. 使用3.1.配置job3.2.构建 提示:如果只想看如何使用jdk1.8构建项目,直接看3.1即可。 1.安装 1.1.相关网址 Jenkins官网:https…...

微软子公司Xandr遭隐私诉讼,或面临巨额罚款
近日,欧洲隐私权倡导组织noyb对微软子公司Xandr提起了诉讼,指控其透明度不足,侵犯了欧盟公民的数据访问权。据指控,Xandr的行为涉嫌违反《通用数据保护条例》(GFPR),因其处理信息并创建用于微目…...

【VRP】基于常春藤算法IVY求解带时间窗的车辆路径问题TWVRP,最短距离附Matlab代码
% VRP - 基于IVY算法的TWVRP最短距离求解 % 数据准备 % 假设有一组客户点的坐标和对应的时间窗信息 % 假设数据已经存储在 coordinates、timeWindows 和 demands 变量中 % 参数设置 numCustomers size(coordinates, 1); % 客户点数量 vehicleCapacity 100; % 车辆容量 numV…...

常用软件的docker compose安装
简介 Docker Compose 是 Docker 的一个工具,用于定义和管理多容器 Docker 应用。通过使用一个单独的 YAML 文件,您可以定义应用所需的所有服务,然后使用一个简单的命令来启动和运行这些服务。Docker Compose 非常适合于微服务架构或任何需要…...

Excel第28享:如何新建一个Excel表格
一、背景需求 小姑电话说:要新建一个表格,并实现将几个单元格进行合并的需求。 二、解决方案 1、在电脑桌面上空白地方,点击鼠标右键,在下拉的功能框中选择“XLS工作表”或“XLSX工作表”都可以,如下图所示。 之后&…...

计算机网络知识汇总
OSI七层模型 七层模型一般指开放系统互连参考模型,开放系统互连参考模型 (Open System Interconnect 简称OSI),OSI参考模型是具有7个层次的框架,自底向上的7个层次分别是物理层、数据链路层、网络层、传输层、会话层、…...
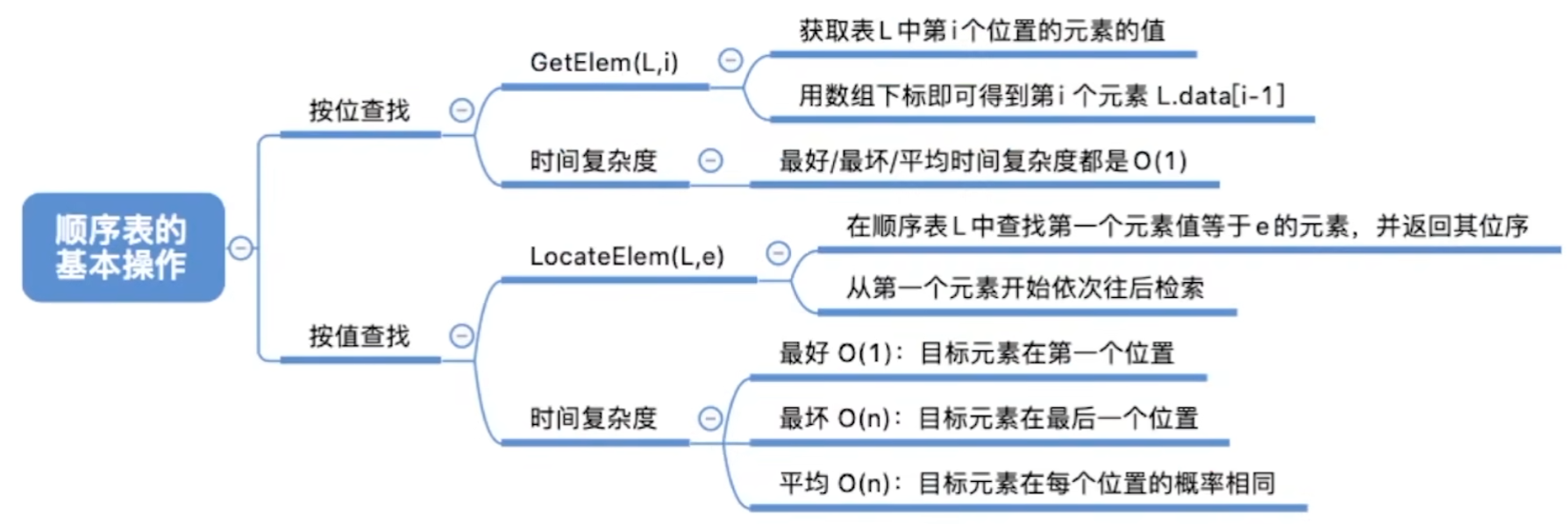
数据结构——考研笔记(二)线性表的定义和线性表之顺序表
文章目录 二、线性表2.1 定义、基本操作2.1.1 知识总览2.1.2 线性表的定义2.1.3 线性表的基本操作2.1.4 知识回顾与重要考点 2.2 顺序表2.2.1 知识总览2.2.2 顺序表的定义2.2.3 顺序表的实现——静态分配2.2.4 顺序表的实现——动态分配2.2.5 知识回顾与重要考点2.2.6 顺序表的…...

quota使用
一、检查系统是否支持 grep CONFIG_QUOTA /boot/config* CONFIG_QUOTAy CONFIG_QUOTA_NETLINK_INTERFACEy # CONFIG_QUOTA_DEBUG is not set CONFIG_QUOTA_TREEy CONFIG_QUOTACTLy CONFIG_QUOTACTL_COMPATy二、安装 yum install -y quota三、配置 3.1 创建磁盘 格式一定要 …...

解决fidder小黑怪倒出JMeter文件缺失域名、请求头
解决fidder小黑怪倒出JMeter文件缺失域名、请求头 1、目录结构: 2、代码 coding:utf-8 Software:PyCharm Time:2024/7/10 14:02 Author:Dr.zxyimport zipfile import os import xml.etree.ElementTree as ET import re#定义信息头 headers_to_extract [Host, Conn…...
智慧城市的神经网络:Transformer模型在智能城市构建中的应用
智慧城市的神经网络:Transformer模型在智能城市构建中的应用 随着城市化的快速发展,智能城市的概念应运而生,旨在通过先进的信息技术提升城市管理效率和居民生活质量。Transformer模型,作为人工智能领域的一颗新星,其…...

产品经理-研发流程-敏捷开发-迭代-需求评审及产品规划(15)
敏捷开发是以用户的需求进化为核心,采用迭代、循序渐进的方法进行软件开发。 通俗来说,敏捷开发是一个软件开发流程,是一个采用了迭代方法的开发流程 简单来说,迭代就是把一个大产品拆分出一些最小的实现单位。完成不同的迭代就最…...

Ansible 安装及使用说明
方案1. 直接下载 源码包到本地后安装 ansible 下载地址:https://releases.ansible.com/ansible/ ansible社区: https://github.com/ansible/ansible 下载地址:GitHub - ansible/ansible at v2.9.0 方案2. 以腾讯的yum源说明:腾讯云文档…...

MyBatisPlus实现增删改查
文章目录 MyBatisPlus实现增删改查基本操作分页查询配置分页插件 MyBatisPlus实现增删改查 实体类GkUser package com.geekmice.springbootselfexercise.entity;import com.baomidou.mybatisplus.annotation.IdType; import com.baomidou.mybatisplus.annotation.TableField;…...

【Rust】——不安全Rust
💻博主现有专栏: C51单片机(STC89C516),c语言,c,离散数学,算法设计与分析,数据结构,Python,Java基础,MySQL,linux…...

使机器人在执行任务时更加稳定
为了使机器人在执行任务时更加稳定,调整参数时需要考虑多个因素,如步态、速度、角度等。这些参数的调整需要基于实际环境、任务需求和机器人自身的物理特性。以下是一些具体的调整建议: 1. 调整步态和步高 gait_type3; step_height0.03;步态…...
-- libswresample使用说明及函数介绍)
FFmpeg学习(五)-- libswresample使用说明及函数介绍
libswresample Audio合成和重采样 libswresample库用来进行audio数据的合成和重采样操作。调用流程: 调用 swr_alloc 创建SwrContext结构体。设置SwrContext参数,有两种方法: 调用av_opt_set_xx函数逐项设置参数;swr_alloc_set_…...
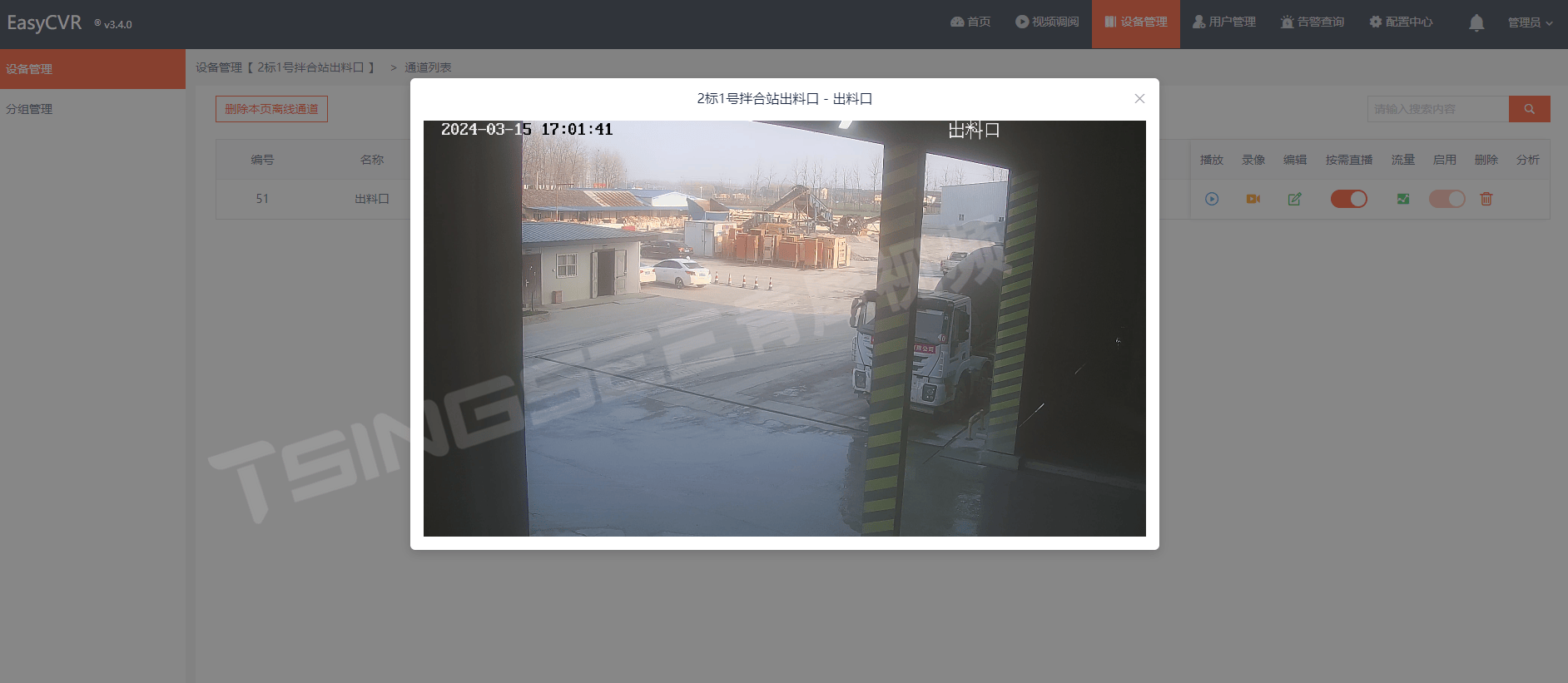
车载视频监控管理方案:无人驾驶出租车安全出行的保障
近日,无人驾驶出租车“萝卜快跑”在武汉开放载人测试成为热门话题。随着科技的飞速发展,无人驾驶技术已逐渐从概念走向现实,特别是在出租车行业中,无人驾驶出租车的推出将为公众提供更为安全、便捷、高效的出行服务。 视频监控技…...

05STM32EXIT外部中断中断系统
STM32EXIT外部中断&中断系统 中断系统中断触发条件:中断处理流程和用途: STM32中断NVIC嵌套中断向量控制器基本结构NVIC基本结构NVIC优先级分组EXTI简介EXTI基本结构AFIO复用IO口EXTI内部框图旋转编码器简介硬件电路外设手册里的介绍NVIC中断使能寄存…...

MetaGPT和LangGraph对比
MetaGPT和LangGraph是两个不同的AI Agent框架,各有其特点和优势:MetaGPT: MetaGPT是一个多Agent协作框架,模拟软件公司的运作方式。它包含多个角色如产品经理、架构师、项目经理和工程师,每个角色都有特定的职责。MetaGPT采用对话模式&#…...

Win10硬盘分区后盘符出现黄色感叹号?别慌,这是BitLocker在‘待机’,教你5分钟彻底关闭它
Win10硬盘分区后盘符出现黄色感叹号?5分钟解除BitLocker待机状态全指南当你完成Win10硬盘分区调整后,突然发现资源管理器中的盘符旁出现了醒目的黄色感叹号标志,这确实会让人心头一紧。别担心,这并非硬盘故障或数据丢失的征兆&…...
)
胖头鱼的技术专栏-427 AI Agent记忆系统可视化页面介绍(20260524)
数据库管理426期 2026-05-17胖头鱼的技术专栏-427 AI Agent记忆系统可视化页面介绍(20260524)写在开始之前记忆系统可视化页面一、登录页面二、知识页面(Knowledge)三、记忆页面(Memory)四、智能体页面&…...

【深度解析】从 Mythos 到 DeepSeek 降价:大模型工程化选型、成本控制与 API 实战
摘要 近期 AI 大模型市场持续加速迭代:Anthropic Mythos 进入部署测试信号增强,OpenAI、Gemini 系列持续升级,DeepSeek 则通过永久降价重塑开发成本结构。本文从工程视角解析模型发布信号、Agentic 系统成本模型,并给出 OpenAI 兼…...

SpringBoot+Vue汽车4S店销售管理系统源码+论文
代码可以查看文章末尾⬇️联系方式获取,记得注明来意哦~🌹 分享万套开题报告任务书答辩PPT模板 作者完整代码目录供你选择: 《SpringBoot网站项目》1800套 《SSM网站项目》1500套 《小程序项目》1600套 《APP项目》1500套 《Python网站项目》…...

美国RTP全系列抗静电塑料产品服务介绍
宏裕塑胶代理美国RTP全系列材料,专注于为制造业企业提供高性价比、稳定可控的工程塑料原料供应及全流程技术支持,凭借源头直采优势与专业服务能力,成为塑胶制品厂、汽车零部件厂及精密电子企业的可靠合作伙伴。宏裕塑胶代理美国RTP全系列材料…...

iOS抓包防护绕过:合规调试的三层穿透实践
1. 这不是“破解”,而是开发者本该掌握的合规调试能力很多人看到“iOS抓包防护绕过”第一反应是:这不就是搞逆向、破壳、绕过安全检测?甚至下意识联想到灰色工具链或越狱环境。但我要先说清楚——本文所有操作,均在苹果官方允许的…...

Gemini SQL生成准确率暴跌87%?揭秘模型幻觉的4个致命诱因及实时校验方案
更多请点击: https://intelliparadigm.com 第一章:Gemini SQL生成准确率暴跌87%?揭秘模型幻觉的4个致命诱因及实时校验方案 近期多项基准测试显示,Gemini Pro 1.5 在复杂业务场景下的SQL生成任务中,准确率从历史平均9…...

徒手撸极简前后端分离Demo!吃透原生JS动态渲染底层
之前一直觉得前后端分离是个特别高大上的工程化概念,总以为得学一堆框架、接口规范、部署流程才能上手。 直到昨天我没用Vue、没用React,纯靠原生JSHTMLCSSjson-server,手写了一套最朴素的前后端分离小案例,瞬间把底层逻辑彻底打通…...

智能体通信的序列化标准探索:JSON、ProtoBuf与自定义格式的效率之争
智能体通信的「快递员之战」:JSON、ProtoBuf与自定义格式的效率深度探索 关键词 智能体通信、序列化/反序列化、JSON、Protocol Buffers、自定义二进制格式、传输效率、编码效率、跨语言兼容 摘要 在人工智能多智能体系统(Multi-Agent System, MAS)、大语言模型(LLM)驱…...

macOS微信防撤回终极指南:3分钟掌握WeChatIntercept完整使用方法
macOS微信防撤回终极指南:3分钟掌握WeChatIntercept完整使用方法 【免费下载链接】WeChatIntercept 微信防撤回插件,一键安装,仅MAC可用,支持v3.7.0微信 项目地址: https://gitcode.com/gh_mirrors/we/WeChatIntercept 还在…...