【深度强化学习】(6) PPO 模型解析,附Pytorch完整代码
大家好,今天和各位分享一下深度强化学习中的近端策略优化算法(proximal policy optimization,PPO),并借助 OpenAI 的 gym 环境完成一个小案例,完整代码可以从我的 GitHub 中获得:
https://github.com/LiSir-HIT/Reinforcement-Learning/tree/main/Model
1. 算法原理
PPO 算法之所以被提出,根本原因在于 Policy Gradient 在处理连续动作空间时 Learning rate 取值抉择困难。Learning rate 取值过小,就会导致深度强化学习收敛性较差,陷入完不成训练的局面,取值过大则导致新旧策略迭代时数据不一致,造成学习波动较大或局部震荡。除此之外,Policy Gradient 因为在线学习的性质,进行迭代策略时原先的采样数据无法被重复利用,每次迭代都需要重新采样;
同样地置信域策略梯度算法(Trust Region Policy Optimization,TRPO)虽然利用重要性采样(Important-sampling)、共轭梯度法求解提升了样本效率、训练速率等,但在处理函数的二阶近似时会面临计算量过大,以及实现过程复杂、兼容性差等缺陷。
PPO 算法具备 Policy Gradient、TRPO 的部分优点,采样数据和使用随机梯度上升方法优化代替目标函数之间交替进行,虽然标准的策略梯度方法对每个数据样本执行一次梯度更新,但 PPO 提出新目标函数,可以实现小批量更新。
鉴于上述问题,该算法在迭代更新时,观察当前策略在 t 时刻智能体处于状态 s 所采取的行为概率,与之前策略所采取行为概率
,计算概率的比值来控制新策略更新幅度,比值
记作:
若新旧策略差异明显且优势函数较大,则适当增加更新幅度;若 比值越接近 1,表明新旧策略差异越小。
优势函数代表,在状态 s 下,行为 a 相对于均值的偏差。在论文中,优势函数 使用 GAE(generalized advantage estimation)来计算:
PPO 算法可依据 Actor 网络的更新方式细化为含有自适应 KL-散度(KL Penalty)的 PPO-Penalty 和含有 Clippped Surrogate Objective 函数的 PPO-Clip。
(1)PPO-Penalty 基于KL 惩罚项优化目标函数,实验证明惩罚项系数 在迭代过程中并非固定值,需要动态调整惩罚权重,其目标函数 L 可以定义为:
惩罚项 的初始值的选择对算法几乎无影响,原因是它能在每次迭代时依据新旧策略的 KL 散度做适宜调整,首先设置 KL 散度阈值
,再通过下面的表达式计算
:
如果 时,证明散度较小,需要弱化惩罚力度,
调整为
;
如果 时,证明散度较大,需要增强惩罚力度,
调整为
。
(2)PPO-Clip 直接对新旧策略比例进行一定程度的 Clip 操作,以约束变化幅度。其目标函数的计算方式如下:
其中, 代表截断超参数,一般设定值为 0.2;
表示截断函数,负责限制比例
在
区间之内,以保证收敛性;最终
借助
函数选取未截断与截断目标之间的更小值,形成目标下限。
可以分为优势函数 A 为正数和负数两种情况,其变化趋势如下图所示:
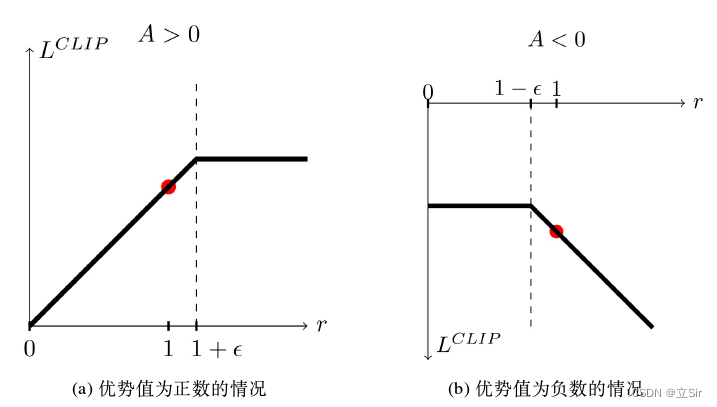
如果优势函数为正数,需要增大新旧策略比值 ,然而当
时,将不提供额外的激励;如果优势函数是负数,需要减少新旧策略比值
,但在
时,不提供额外的激励,这使得新旧策略的差异被限制在合理范围内。PPO 本质上基于 Actor-Critic 框架,算法流程如下:
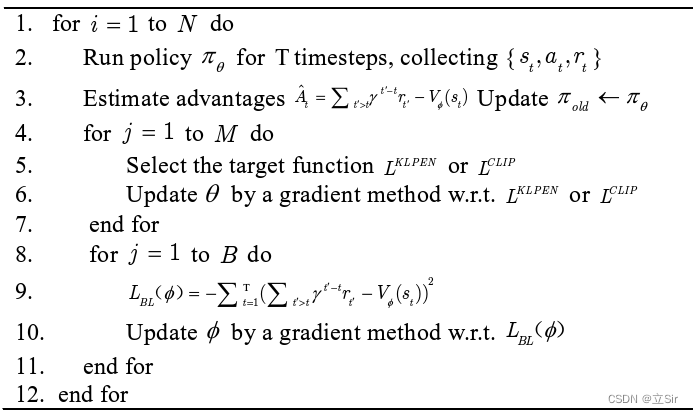
PPO 算法主要由 Actor 和 Critic 两部分构成,Critic 部分更新方式与其他Actor-Critic 类型相似,通常采用计算 TD error(时序差分误差)形式。对于 Actor 的更新方式,PPO 可在KLPENL 、CLIPL 之间选择对于当前实验环境稳定性适用性更强的目标函数,经过 OpenAI 研究团队实验论证,PPO- Clip 比 PPO- Penalty有更好的数据效率和可行性。
2. 代码实现
下面我就采用 Clip 形式的 PPO。模型构建代码如下。下面的模型适用于 action 是离散的情况,连续情况的代码可以从我的 GitHub 中获取。
# 代码用于离散环境的模型
import numpy as np
import torch
from torch import nn
from torch.nn import functional as F# ----------------------------------- #
# 构建策略网络--actor
# ----------------------------------- #class PolicyNet(nn.Module):def __init__(self, n_states, n_hiddens, n_actions):super(PolicyNet, self).__init__()self.fc1 = nn.Linear(n_states, n_hiddens)self.fc2 = nn.Linear(n_hiddens, n_actions)def forward(self, x):x = self.fc1(x) # [b,n_states]-->[b,n_hiddens]x = F.relu(x)x = self.fc2(x) # [b, n_actions]x = F.softmax(x, dim=1) # [b, n_actions] 计算每个动作的概率return x# ----------------------------------- #
# 构建价值网络--critic
# ----------------------------------- #class ValueNet(nn.Module):def __init__(self, n_states, n_hiddens):super(ValueNet, self).__init__()self.fc1 = nn.Linear(n_states, n_hiddens)self.fc2 = nn.Linear(n_hiddens, 1)def forward(self, x):x = self.fc1(x) # [b,n_states]-->[b,n_hiddens]x = F.relu(x)x = self.fc2(x) # [b,n_hiddens]-->[b,1] 评价当前的状态价值state_valuereturn x# ----------------------------------- #
# 构建模型
# ----------------------------------- #class PPO:def __init__(self, n_states, n_hiddens, n_actions,actor_lr, critic_lr, lmbda, epochs, eps, gamma, device):# 实例化策略网络self.actor = PolicyNet(n_states, n_hiddens, n_actions).to(device)# 实例化价值网络self.critic = ValueNet(n_states, n_hiddens).to(device)# 策略网络的优化器self.actor_optimizer = torch.optim.Adam(self.actor.parameters(), lr=actor_lr)# 价值网络的优化器self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), lr = critic_lr)self.gamma = gamma # 折扣因子self.lmbda = lmbda # GAE优势函数的缩放系数self.epochs = epochs # 一条序列的数据用来训练轮数self.eps = eps # PPO中截断范围的参数self.device = device# 动作选择def take_action(self, state):# 维度变换 [n_state]-->tensor[1,n_states]state = torch.tensor(state[np.newaxis, :]).to(self.device)# 当前状态下,每个动作的概率分布 [1,n_states]probs = self.actor(state)# 创建以probs为标准的概率分布action_list = torch.distributions.Categorical(probs)# 依据其概率随机挑选一个动作action = action_list.sample().item()return action# 训练def learn(self, transition_dict):# 提取数据集states = torch.tensor(transition_dict['states'], dtype=torch.float).to(self.device)actions = torch.tensor(transition_dict['actions']).to(self.device).view(-1,1)rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).to(self.device).view(-1,1)next_states = torch.tensor(transition_dict['next_states'], dtype=torch.float).to(self.device)dones = torch.tensor(transition_dict['dones'], dtype=torch.float).to(self.device).view(-1,1)# 目标,下一个状态的state_value [b,1]next_q_target = self.critic(next_states)# 目标,当前状态的state_value [b,1]td_target = rewards + self.gamma * next_q_target * (1-dones)# 预测,当前状态的state_value [b,1]td_value = self.critic(states)# 目标值和预测值state_value之差 [b,1]td_delta = td_target - td_value# 时序差分值 tensor-->numpy [b,1]td_delta = td_delta.cpu().detach().numpy()advantage = 0 # 优势函数初始化advantage_list = []# 计算优势函数for delta in td_delta[::-1]: # 逆序时序差分值 axis=1轴上倒着取 [], [], []# 优势函数GAE的公式advantage = self.gamma * self.lmbda * advantage + deltaadvantage_list.append(advantage)# 正序advantage_list.reverse()# numpy --> tensor [b,1]advantage = torch.tensor(advantage_list, dtype=torch.float).to(self.device)# 策略网络给出每个动作的概率,根据action得到当前时刻下该动作的概率old_log_probs = torch.log(self.actor(states).gather(1, actions)).detach()# 一组数据训练 epochs 轮for _ in range(self.epochs):# 每一轮更新一次策略网络预测的状态log_probs = torch.log(self.actor(states).gather(1, actions))# 新旧策略之间的比例ratio = torch.exp(log_probs - old_log_probs)# 近端策略优化裁剪目标函数公式的左侧项surr1 = ratio * advantage# 公式的右侧项,ratio小于1-eps就输出1-eps,大于1+eps就输出1+epssurr2 = torch.clamp(ratio, 1-self.eps, 1+self.eps) * advantage# 策略网络的损失函数actor_loss = torch.mean(-torch.min(surr1, surr2))# 价值网络的损失函数,当前时刻的state_value - 下一时刻的state_valuecritic_loss = torch.mean(F.mse_loss(self.critic(states), td_target.detach()))# 梯度清0self.actor_optimizer.zero_grad()self.critic_optimizer.zero_grad()# 反向传播actor_loss.backward()critic_loss.backward()# 梯度更新self.actor_optimizer.step()self.critic_optimizer.step()3. 案例演示
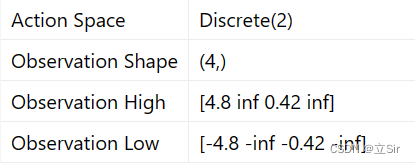
基于 OpenAI 的 gym 环境完成一个推车游戏,一个离散的环境,目标是左右移动小车将黄色的杆子保持竖直。动作维度为2,属于离散值;状态维度为 4,分别是坐标、速度、角度、角速度。
import numpy as np
import matplotlib.pyplot as plt
import gym
import torch
from RL_brain import PPOdevice = torch.device('cuda') if torch.cuda.is_available() \else torch.device('cpu')# ----------------------------------------- #
# 参数设置
# ----------------------------------------- #num_episodes = 100 # 总迭代次数
gamma = 0.9 # 折扣因子
actor_lr = 1e-3 # 策略网络的学习率
critic_lr = 1e-2 # 价值网络的学习率
n_hiddens = 16 # 隐含层神经元个数
env_name = 'CartPole-v1'
return_list = [] # 保存每个回合的return# ----------------------------------------- #
# 环境加载
# ----------------------------------------- #env = gym.make(env_name, render_mode="human")
n_states = env.observation_space.shape[0] # 状态数 4
n_actions = env.action_space.n # 动作数 2# ----------------------------------------- #
# 模型构建
# ----------------------------------------- #agent = PPO(n_states=n_states, # 状态数n_hiddens=n_hiddens, # 隐含层数n_actions=n_actions, # 动作数actor_lr=actor_lr, # 策略网络学习率critic_lr=critic_lr, # 价值网络学习率lmbda = 0.95, # 优势函数的缩放因子epochs = 10, # 一组序列训练的轮次eps = 0.2, # PPO中截断范围的参数gamma=gamma, # 折扣因子device = device)# ----------------------------------------- #
# 训练--回合更新 on_policy
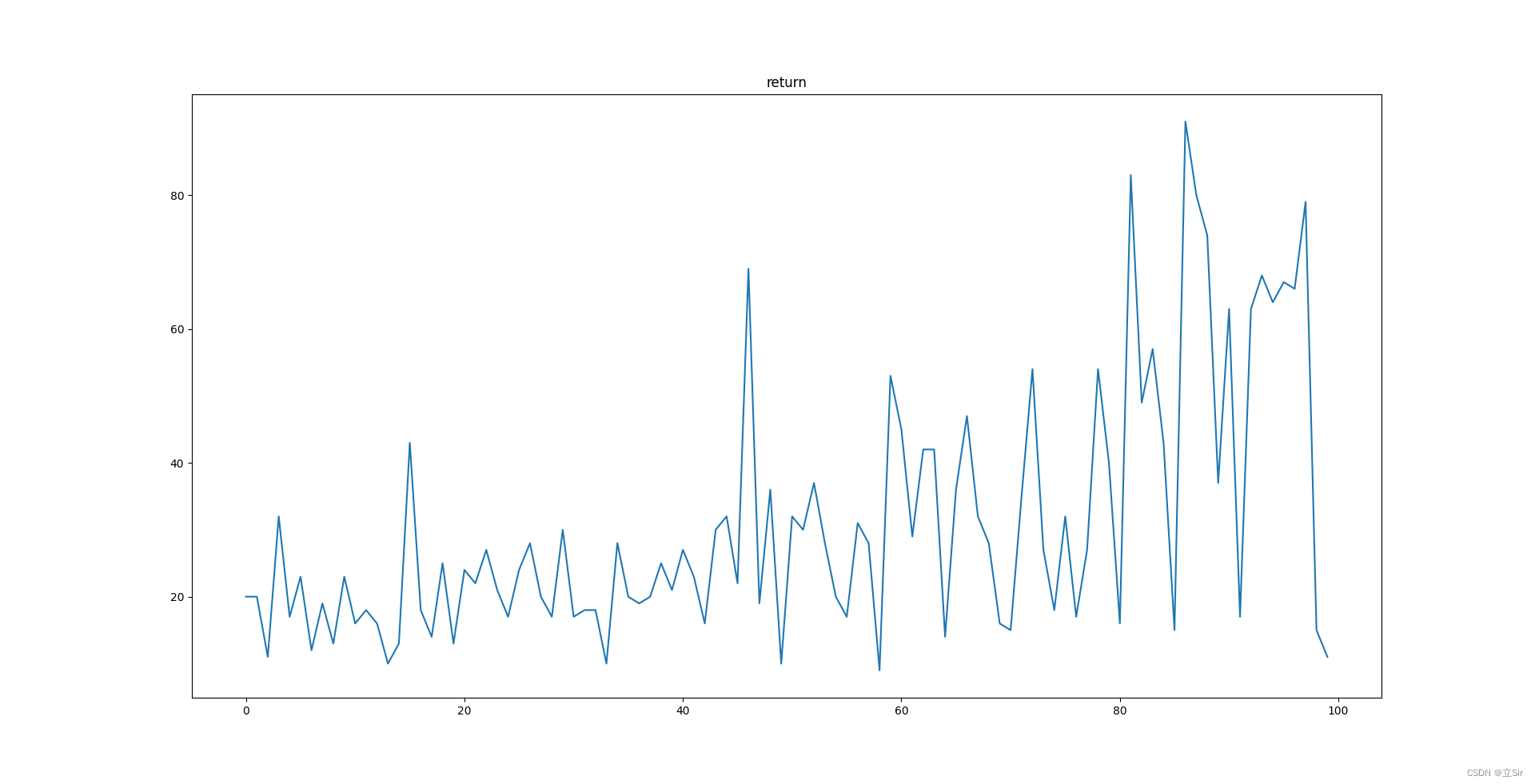
# ----------------------------------------- #for i in range(num_episodes):state = env.reset()[0] # 环境重置done = False # 任务完成的标记episode_return = 0 # 累计每回合的reward# 构造数据集,保存每个回合的状态数据transition_dict = {'states': [],'actions': [],'next_states': [],'rewards': [],'dones': [],}while not done:action = agent.take_action(state) # 动作选择next_state, reward, done, _, _ = env.step(action) # 环境更新# 保存每个时刻的状态\动作\...transition_dict['states'].append(state)transition_dict['actions'].append(action)transition_dict['next_states'].append(next_state)transition_dict['rewards'].append(reward)transition_dict['dones'].append(done)# 更新状态state = next_state# 累计回合奖励episode_return += reward# 保存每个回合的returnreturn_list.append(episode_return)# 模型训练agent.learn(transition_dict)# 打印回合信息print(f'iter:{i}, return:{np.mean(return_list[-10:])}')# -------------------------------------- #
# 绘图
# -------------------------------------- #plt.plot(return_list)
plt.title('return')
plt.show()训练100回合,绘制每回合的 return
相关文章:
【深度强化学习】(6) PPO 模型解析,附Pytorch完整代码
大家好,今天和各位分享一下深度强化学习中的近端策略优化算法(proximal policy optimization,PPO),并借助 OpenAI 的 gym 环境完成一个小案例,完整代码可以从我的 GitHub 中获得: https://gith…...
【数据结构】第二站:顺序表
目录 一、线性表 二、顺序表 1.顺序表的概念以及结构 2.顺序表的接口实现 3.顺序表完整代码 三、顺序表的经典题目 1.移除元素 2.删除有序数组中的重复项 3.合并两个有序数组 一、线性表 在了解顺序表前,我们得先了解线性表的概念 线性表(linear…...

嵌入式安防监控项目——实现真实数据的上传
目录 一、相关驱动开发 二、A9主框架 三、脚本及数据上传实验 https://www.yuque.com/uh1h8r/dqrma0/tx0fq08mw1ar1sor?singleDoc# 《常见问题》 上个笔记的相关问题 一、相关驱动开发 /* mpu6050六轴传感器 */ i2c138B0000 { /* #address-cells <1>…...
SAP 生成UUID
UUID含义是通用唯一识别码 (Universally Unique Identifier),这 是一个软件建构的标准,也是被开源软件基金会 (Open Software Foundation, OSF) 的组织应用在分布式计算环境 (Distributed Computing Environment, DCE) 领域的一部分。 UUID-Universally…...

DevOPs介绍,这一篇就足够了
一、什么是DevOps? DevOps是一种将软件开发和IT运维进行整合的文化和运动。它的目标是通过加强软件开发、测试和运维之间的协作和沟通,使整个软件开发和交付过程更加高效、快速、安全和可靠。DevOps涵盖了从计划和设计到开发、测试、交付和部署的全生命…...
libcurl库简介
一、libcurl简介libcurl是一个跨平台的网络协议库,支持http, https, ftp, gopher, telnet, dict, file, 和ldap 协议。libcurl同样支持HTTPS证书授权,HTTP POST, HTTP PUT, FTP 上传, HTTP基本表单上传,代理,cookies,和用户认证。…...
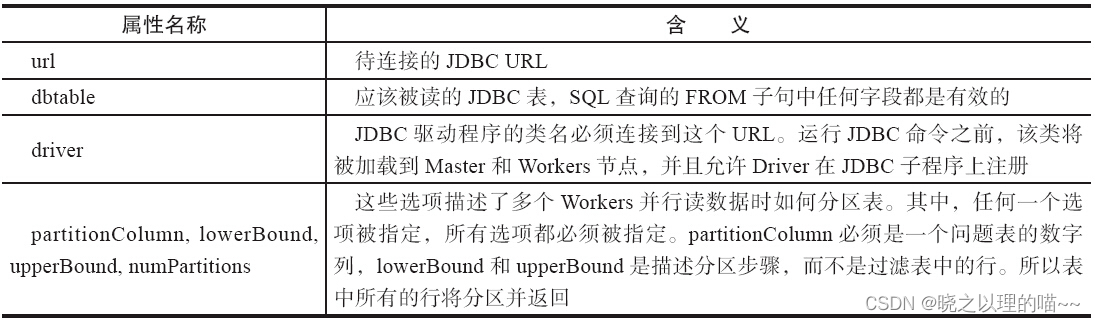
Spark SQL支持DataFrame操作的数据源
DataFrame提供统一接口加载和保存数据源中的数据,包括:结构化数据、Parquet文件、JSON文件、Hive表,以及通过JDBC连接外部数据源。一个DataFrame可以作为普通的RDD操作,也可以通过(registerTempTable)注册成…...
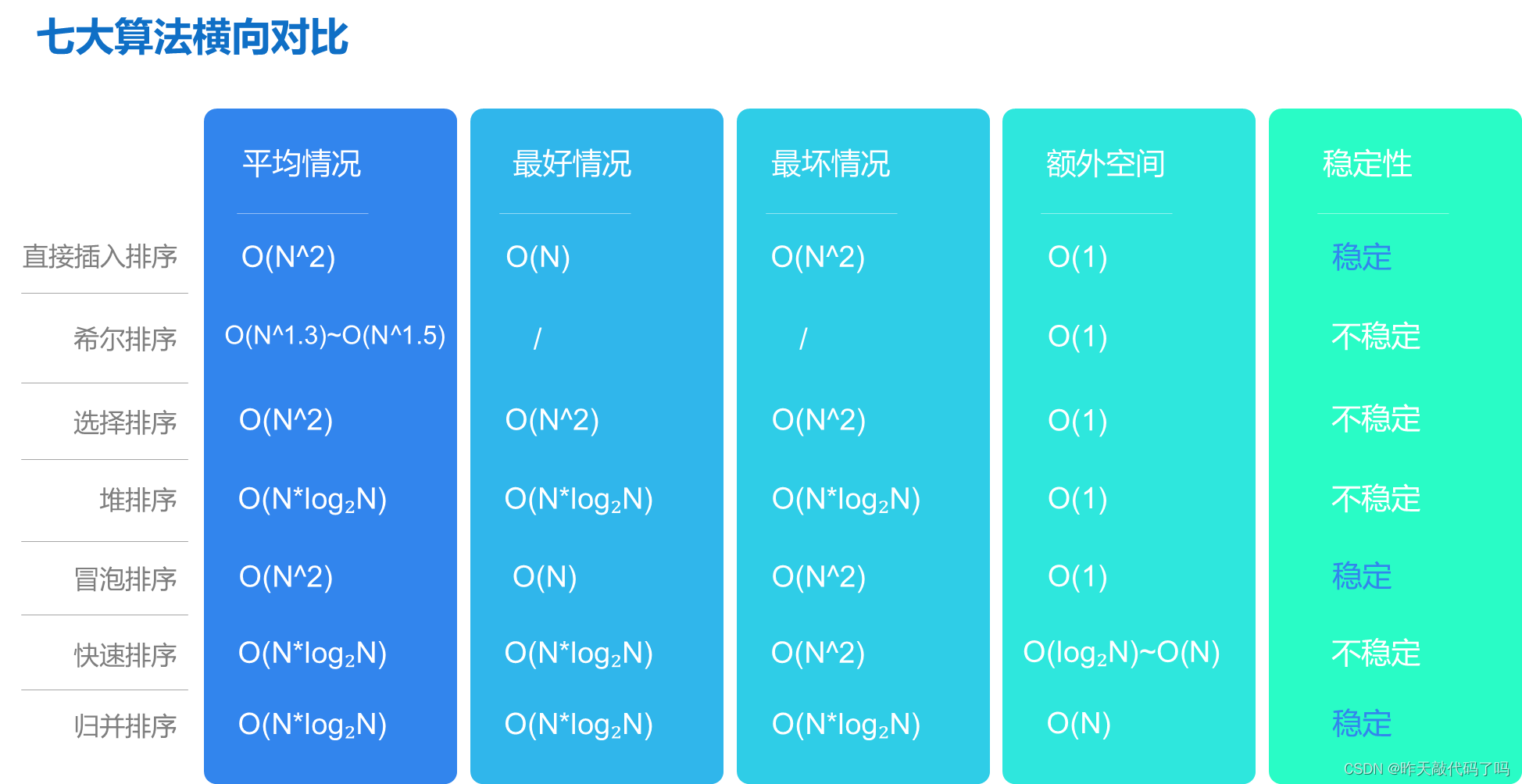
Java【归并排序】算法, 大白话式图文解析(附代码)
文章目录前言一、排序相关概念1, 什么是排序2, 什么是排序的稳定性3, 七大排序分类二、归并排序1, 图文解析2, 代码实现三、性能分析四、七大排序算法总体分析前言 各位读者好, 我是小陈, 这是我的个人主页 小陈还在持续努力学习编程, 努力通过博客输出所学知识 如果本篇对你有…...
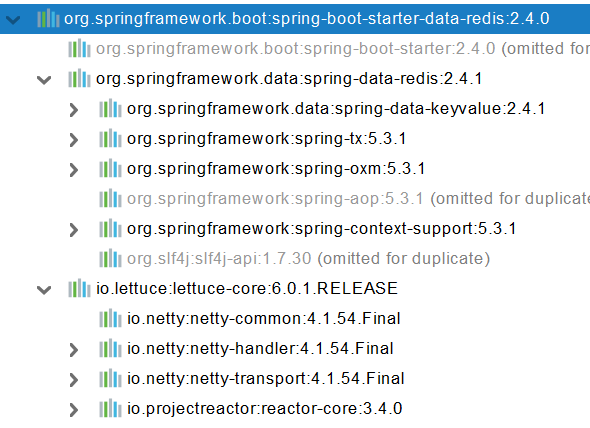
【springboot】数据库访问
1、SQL 1、数据源的自动配置-HikariDataSource 1、导入JDBC场景 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-jdbc</artifactId></dependency>数据库驱动? 为什么导入JD…...

普通和hive兼容模式下sql的差异
–odps sql –– –author:宋文理 –create time:2023-03-08 15:23:52 –– – 差异分为三块 – 1.运算符的差异 – 2.类型转换的差异 – 3.内建函数的差异 – 以下是运算符的差异: – BITAND(&) – 当输入参数是BIGINT类型的时候&…...
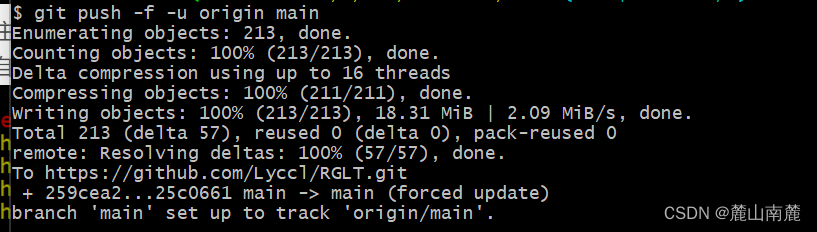
github开源自己代码
接下来,我们需要先下载Git,的网址:https://git-scm.com/downloads,安装时如果没有特殊需求,一直下一步就可以了,安装完成之后,双击打开Git Bash 出现以下界面: 第一步:…...
数据库基础语法
sql(Structured Query Language 结构化查询语言) SQL语法 use DataTableName; 命令用于选择数据库。set names utf8; 命令用于设置使用的字符集。SELECT * FROM Websites; 读取数据表的信息。上面的表包含五条记录(每一条对应一个网站信息&…...
【Java】期末复习知识点总结(4)
适合Java期末的复习~ (Java期末复习知识点总结分为4篇,这里是最后一篇啦)第一篇~https://blog.csdn.net/qq_53869058/article/details/129417537?spm1001.2014.3001.5501第二篇~https://blog.csdn.net/qq_53869058/article/details/1294751…...
IDEA好用插件:MybatisX快速生成接口实体类mapper.xml映射文件
目录 1、在Idea中找到下载插件,Install,重启Idea 2、一个测试java文件,里面有com包 3、在Idea中添加数据库 --------以Oracle数据库为例 4、快速生成entity-service-mapper方法 5、查看生成的代码 6、自动生成(增删查改࿰…...

【JavaEE】初识线程
一、简述进程认识线程之前我们应该去学习一下“进程" 的概念,我们可以把一个运行起来的程序称之为进程,进程的调度,进程的管理是由我们的操作系统来管理的,创建一个进程,操作系统会为每一个进程创建一个 PCB&…...

智慧水务监控系统-智慧水务信息化平台建设
平台概述柳林智慧水务监控系统(智慧水务信息化平台)是以物联感知技术、大数据、智能控制、云计算、人工智能、数字孪生、AI算法、虚拟现实技术为核心,以监测仪表、通讯网络、数据库系统、数据中台、模型软件、前台展示、智慧运维等产品体系为…...
【Linux】进程优先级前后台理解
环境:centos7.6,腾讯云服务器Linux文章都放在了专栏:【Linux】欢迎支持订阅🌹相关文章推荐:【Linux】冯.诺依曼体系结构与操作系统【Linux】进程理解与学习(Ⅰ)浅谈Linux下的shell--BASH【Linux…...
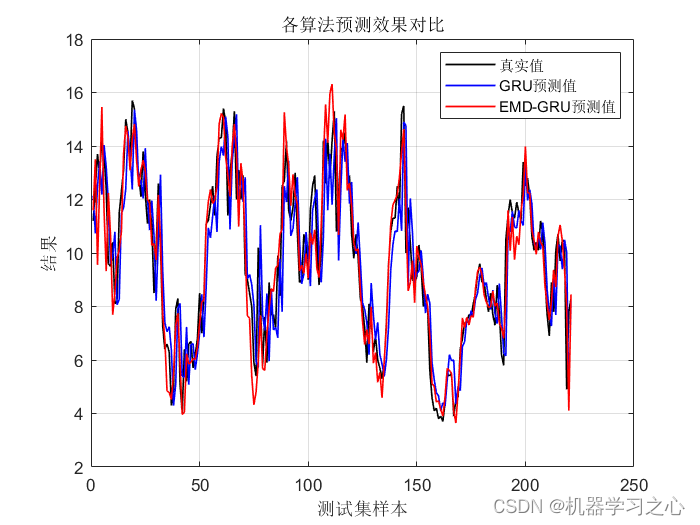
时序预测 | MATLAB实现基于EMD-GRU时间序列预测(EMD分解结合GRU门控循环单元)
时序预测 | MATLAB实现基于EMD-GRU时间序列预测(EMD分解结合GRU门控循环单元) 目录 时序预测 | MATLAB实现基于EMD-GRU时间序列预测(EMD分解结合GRU门控循环单元)效果一览基本描述模型描述程序设计参考资料效果一览...

python 模拟鼠标,键盘点击
信息爆炸 消息轰炸模拟鼠标和键盘敲击import time from pynput.keyboard import Controller as key_col from pynput.mouse import Button,Controller def keyboard_input(insertword):keyboardkey_col()keyboard.type(insertword)def mouth():mouseController()mouse.press(…...
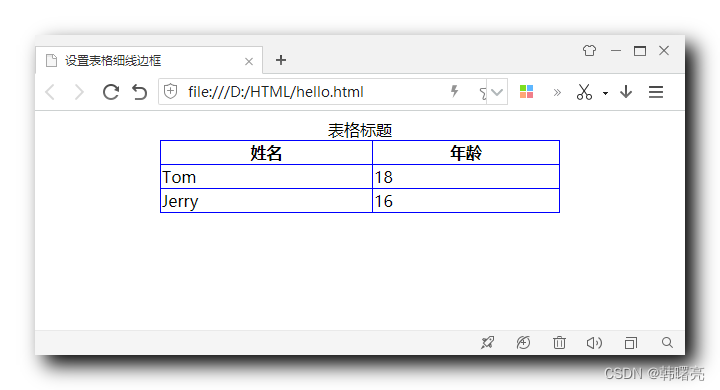
【CSS】盒子边框 ③ ( 设置表格细线边框 | 合并相邻边框 border-collapse: collapse; )
文章目录一、设置表格细线边框1、表格示例2、合并相邻边框3、完整代码示例一、设置表格细线边框 1、表格示例 给定一个 HTML 结构中的表格 , 默认样式如下 : <!DOCTYPE html> <html lang"en"> <head> <meta charset"UTF-8" />…...

零配置部署Wan2.2-I2V-A14B:RTX4090D优化镜像实战,快速生成高质量视频
零配置部署Wan2.2-I2V-A14B:RTX4090D优化镜像实战,快速生成高质量视频 1. 开箱即用的视频生成解决方案 想象一下,你只需要一条简单的文本描述,就能在几分钟内生成一段高清视频——夕阳下的海浪拍打着沙滩,海鸥在低空…...

3个步骤解决CAJ文献跨平台阅读难题:开源格式转换工具全解析
3个步骤解决CAJ文献跨平台阅读难题:开源格式转换工具全解析 【免费下载链接】caj2pdf Convert CAJ (China Academic Journals) files to PDF. 转换中国知网 CAJ 格式文献为 PDF。佛系转换,成功与否,皆是玄学。 项目地址: https://gitcode.c…...
)
别再乱用Adam了!PyTorch中AdamW优化器的正确打开方式(附代码示例)
别再乱用Adam了!PyTorch中AdamW优化器的正确打开方式(附代码示例) 当你盯着训练曲线发呆,发现验证集表现始终不如预期时,或许该检查一下优化器的选择了。很多开发者习惯性地在PyTorch脚本里写下optim.Adam(model.para…...

为什么你的脑影像分析总出错?聊聊AC-PC线标准化背后的原理与MIPAV实现
为什么你的脑影像分析总出错?AC-PC线标准化原理与MIPAV实战解析 在神经影像研究的实验室里,最常听到的抱怨莫过于"同样的分析方法,这次的结果怎么完全对不上?"。就像用不同比例尺的地图导航会迷路一样,忽略A…...

5步搞定Qwen3-ASR语音识别:支持多语言和方言,快速上手教程
5步搞定Qwen3-ASR语音识别:支持多语言和方言,快速上手教程 语音识别技术正在改变我们与数字世界的交互方式,而Qwen3-ASR以其强大的多语言和方言支持能力脱颖而出。本文将带你用最简单的方式,在5个步骤内完成这个专业级语音识别系…...

300FPS的实时目标跟踪是怎么炼成的?手把手拆解KCF算法里的数学魔法
300FPS实时目标跟踪背后的数学魔法:KCF算法深度解密 在计算机视觉领域,实时目标跟踪一直是个令人着迷又充满挑战的问题。想象一下,当你在观看一场足球比赛时,摄像机需要实时锁定某个球员;或者当自动驾驶汽车行驶时&am…...

STM32F103C8T6连接HC-06蓝牙模块的完整避坑指南:从AT指令调试到数据收发异常处理
STM32F103C8T6与HC-06蓝牙模块实战避坑手册:从AT指令异常到数据收发的深度解决方案 当你第一次尝试用STM32F103C8T6驱动HC-06蓝牙模块时,是否遇到过这样的场景:AT指令发送后如同石沉大海,串口调试助手始终一片空白;或是…...

造相-Z-Image-Turbo 结合JavaScript动态网页:打造浏览器端实时AI绘图演示
造相-Z-Image-Turbo 结合JavaScript动态网页:打造浏览器端实时AI绘图演示 最近在折腾AI绘图模型部署的时候,我发现了一个挺有意思的事儿:很多朋友把模型在服务器上跑起来,测试一下生成效果,就觉得完事儿了。但怎么把这…...

用Python脚本让Crazyflie 2.X无人机动起来:手把手教你写第一个自主飞行程序
用Python脚本让Crazyflie 2.X无人机动起来:从零编写自主飞行程序 当第一次看到Crazyflie这个巴掌大的无人机在桌面上悬停时,我意识到微小型飞行器的编程控制远比想象中更有趣。与传统无人机不同,Crazyflie 2.X系列通过Python脚本就能实现毫米…...

RVC效果对比实测:原声vs克隆声,你能听出区别吗?
RVC效果对比实测:原声vs克隆声,你能听出区别吗? 1. 引言:AI语音克隆技术的新突破 想象一下,你最喜欢的歌手正在用你的声音唱歌,或者你的播客节目突然有了专业播音员的音色。这不再是科幻场景,…...