嵌入式C++、Qt/QML和MQTT:智能工厂设备监控系统的全流程介绍(附代码示例)
1. 项目概述
本项目旨在开发一套先进的智能工厂设备监控系统,集成嵌入式技术、工业通信协议和人机界面等多项技术,实现对工厂设备的全方位实时监控、高精度数据采集和智能化分析。该系统将显著提升工厂设备的运行效率,大幅降低维护成本,并为管理层决策提供可靠的数据支持。
主要功能包括:
- 实时监控多种工业设备的运行状态
- 高精度采集和智能处理设备运行数据
- 通过标准工业协议与各类设备进行可靠通信
- 提供直观、友好的人机交互界面
- 智能异常检测、报警和处理机制
2. 系统设计
2.1 硬件设计

硬件系统主要包括以下组件:
- ARM Cortex-M4微控制器:选用STM32F407VGT6,主频168MHz,1MB Flash,192KB RAM,作为系统的核心处理单元。
- 16位ADC/DAC模块:利用STM32内置的12位ADC,外接16位ADC扩展芯片AD7606,实现高精度数据采集。
- 7寸电容触摸屏:分辨率800x480,提供清晰直观的人机交互界面。
- Modbus-RTU/Profibus-DP接口:集成MAX485芯片实现Modbus-RTU通信,使用Profibus-DP控制器芯片VPC3+C实现Profibus-DP通信。
- 传感器系统:包括PT100温度传感器、压力变送器和三轴加速度传感器,用于全面采集设备运行数据。
2.2 软件设计

软件系统主要包括以下模块:
-
数据采集模块:负责配置和控制ADC,实现高速数据采集,包括传感器数据的预处理和缓存。支持多通道并行采集,采样率可达1MSPS。
-
通信模块:实现Modbus-RTU和Profibus-DP协议,与各种工业设备进行数据交换。支持多设备并发通信,确保实时性和可靠性。
-
人机界面模块:基于Qt/C++开发,使用QML实现流畅的触摸屏交互和数据可视化。提供实时数据展示、历史趋势查询、报警管理等功能。
-
数据处理模块:实现数字滤波、FFT频谱分析、异常检测等算法。使用卡尔曼滤波器进行数据平滑,快速傅里叶变换进行频域分析,基于机器学习的异常检测算法实现设备故障预警。
-
系统管理模块:负责系统配置、用户权限管理、日志记录等功能。支持远程配置和固件升级。
-
数据存储模块:使用轻量级数据库SQLite存储历史数据和配置信息,支持数据导出和备份恢复。
-
网络通信模块:实现与上位机或云平台的数据交互,支持MQTT协议,实现远程监控和数据上报。
3. 代码实现
3.1 数据采集模块
// adc_driver.h
#ifndef ADC_DRIVER_H
#define ADC_DRIVER_H#include <stdint.h>#define ADC_CHANNELS 8
#define ADC_RESOLUTION 65536 // 16-bit ADCtypedef struct {uint16_t raw_data[ADC_CHANNELS];float voltage[ADC_CHANNELS];
} ADC_Data;void ADC_Init(void);
void ADC_StartConversion(void);
ADC_Data ADC_GetData(void);#endif// adc_driver.c
#include "adc_driver.h"
#include "stm32f4xx_hal.h"static ADC_HandleTypeDef hadc1;
static DMA_HandleTypeDef hdma_adc1;
static uint16_t adc_raw_buffer[ADC_CHANNELS];void ADC_Init(void) {// ADC GPIO配置__HAL_RCC_GPIOA_CLK_ENABLE();GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);// ADC1配置hadc1.Instance = ADC1;hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;hadc1.Init.Resolution = ADC_RESOLUTION_12B;hadc1.Init.ScanConvMode = ENABLE;hadc1.Init.ContinuousConvMode = ENABLE;hadc1.Init.DiscontinuousConvMode = DISABLE;hadc1.Init.NbrOfConversion = ADC_CHANNELS;hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;hadc1.Init.NbrOfDiscConversion = 0;hadc1.Init.DMAContinuousRequests = ENABLE;hadc1.Init.EOCSelection = ADC_EOC_SEQ_CONV;HAL_ADC_Init(&hadc1);// 配置ADC通道ADC_ChannelConfTypeDef sConfig = {0};for (int i = 0; i < ADC_CHANNELS; i++) {sConfig.Channel = ADC_CHANNEL_0 + i;sConfig.Rank = i + 1;sConfig.SamplingTime = ADC_SAMPLETIME_480CYCLES;HAL_ADC_ConfigChannel(&hadc1, &sConfig);}// 配置DMA__HAL_RCC_DMA2_CLK_ENABLE();hdma_adc1.Instance = DMA2_Stream0;hdma_adc1.Init.Channel = DMA_CHANNEL_0;hdma_adc1.Init.Direction = DMA_PERIPH_TO_MEMORY;hdma_adc1.Init.PeriphInc = DMA_PINC_DISABLE;hdma_adc1.Init.MemInc = DMA_MINC_ENABLE;hdma_adc1.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;hdma_adc1.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;hdma_adc1.Init.Mode = DMA_CIRCULAR;hdma_adc1.Init.Priority = DMA_PRIORITY_HIGH;hdma_adc1.Init.FIFOMode = DMA_FIFOMODE_DISABLE;HAL_DMA_Init(&hdma_adc1);__HAL_LINKDMA(&hadc1, DMA_Handle, hdma_adc1);
}void ADC_StartConversion(void) {HAL_ADC_Start_DMA(&hadc1, (uint32_t*)adc_raw_buffer, ADC_CHANNELS);
}ADC_Data ADC_GetData(void) {ADC_Data data;for (int i = 0; i < ADC_CHANNELS; i++) {data.raw_data[i] = adc_raw_buffer[i];data.voltage[i] = (float)adc_raw_buffer[i] * 3.3f / ADC_RESOLUTION;}return data;
}说明:
-
ADC_Init()函数初始化ADC和DMA。它配置GPIO引脚为模拟输入,设置ADC参数(如时钟、分辨率、扫描模式等),并配置DMA以自动传输ADC转换结果。 -
ADC_StartConversion()函数启动ADC转换,使用DMA模式连续采集数据。 -
ADC_GetData()函数返回最新的ADC数据,包括原始数字值和转换后的电压值。
3.2 通信模块
// modbus_rtu.h
#ifndef MODBUS_RTU_H
#define MODBUS_RTU_H#include <stdint.h>#define MAX_MODBUS_FRAME_SIZE 256typedef struct {uint8_t slave_address;uint8_t function_code;uint8_t data[MAX_MODBUS_FRAME_SIZE];uint16_t data_length;
} ModbusFrame;void Modbus_Init(void);
int Modbus_SendFrame(ModbusFrame *frame);
int Modbus_ReceiveFrame(ModbusFrame *frame);#endif// modbus_rtu.c
#include "modbus_rtu.h"
#include "stm32f4xx_hal.h"static UART_HandleTypeDef huart2;
static uint8_t rx_buffer[MAX_MODBUS_FRAME_SIZE];
static uint16_t rx_index = 0;void Modbus_Init(void) {// UART2 初始化huart2.Instance = USART2;huart2.Init.BaudRate = 9600;huart2.Init.WordLength = UART_WORDLENGTH_8B;huart2.Init.StopBits = UART_STOPBITS_1;huart2.Init.Parity = UART_PARITY_NONE;huart2.Init.Mode = UART_MODE_TX_RX;huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart2.Init.OverSampling = UART_OVERSAMPLING_16;HAL_UART_Init(&huart2);// 启动接收中断HAL_UART_Receive_IT(&huart2, rx_buffer, 1);
}uint16_t Modbus_CRC16(uint8_t *buffer, uint16_t length) {uint16_t crc = 0xFFFF;for (uint16_t i = 0; i < length; i++) {crc ^= buffer[i];for (int j = 0; j < 8; j++) {if (crc & 0x0001) {crc = (crc >> 1) ^ 0xA001;} else {crc >>= 1;}}}return crc;
}int Modbus_SendFrame(ModbusFrame *frame) {uint8_t tx_buffer[MAX_MODBUS_FRAME_SIZE + 4];uint16_t tx_length = 0;tx_buffer[tx_length++] = frame->slave_address;tx_buffer[tx_length++] = frame->function_code;memcpy(&tx_buffer[tx_length], frame->data, frame->data_length);tx_length += frame->data_length;uint16_t crc = Modbus_CRC16(tx_buffer, tx_length);tx_buffer[tx_length++] = crc & 0xFF;tx_buffer[tx_length++] = (crc >> 8) & 0xFF;return HAL_UART_Transmit(&huart2, tx_buffer, tx_length, 100);
}int Modbus_ReceiveFrame(ModbusFrame *frame) {if (rx_index < 4) {return -1; // 帧不完整}uint16_t received_crc = (rx_buffer[rx_index - 1] << 8) | rx_buffer[rx_index - 2];uint16_t calculated_crc = Modbus_CRC16(rx_buffer, rx_index - 2);if (received_crc != calculated_crc) {rx_index = 0;return -2; // CRC错误}frame->slave_address = rx_buffer[0];frame->function_code = rx_buffer[1];frame->data_length = rx_index - 4;memcpy(frame->data, &rx_buffer[2], frame->data_length);rx_index = 0;return 0; // 成功接收帧
}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {if (huart->Instance == USART2) {if (rx_index < MAX_MODBUS_FRAME_SIZE) {rx_index++;HAL_UART_Receive_IT(&huart2, &rx_buffer[rx_index], 1);} else {rx_index = 0; // 缓冲区溢出,重置接收}}
}说明:
-
Modbus_Init()函数初始化UART2用于Modbus-RTU通信,并启动接收中断。 -
Modbus_CRC16()函数计算Modbus帧的CRC校验码。 -
Modbus_SendFrame()函数发送Modbus帧,包括添加CRC校验码。 -
Modbus_ReceiveFrame()函数处理接收到的Modbus帧,验证CRC校验码并解析帧内容。 -
HAL_UART_RxCpltCallback()函数是UART接收中断回调,用于连续接收Modbus帧数据。
3.3 人机界面模块
由于人机界面模块使用Qt/QML开发,这里提供一个简化的QML示例:
// MainScreen.qml
import QtQuick 2.12
import QtQuick.Controls 2.12
import QtCharts 2.3Rectangle {width: 800height: 480ChartView {id: temperatureCharttitle: "温度趋势"anchors.left: parent.leftanchors.top: parent.topwidth: parent.width / 2height: parent.height / 2LineSeries {name: "温度"// 数据点将通过C++后端更新}}ChartView {id: pressureCharttitle: "压力趋势"anchors.right: parent.rightanchors.top: parent.topwidth: parent.width / 2height: parent.height / 2LineSeries {name: "压力"// 数据点将通过C++后端更新}}ListView {id: alarmListanchors.left: parent.leftanchors.bottom: parent.bottomwidth: parent.widthheight: parent.height / 2model: AlarmModel {} // 假设有一个C++实现的AlarmModeldelegate: Text {text: model.timestamp + ": " + model.messagecolor: model.severity === "High" ? "red" : "yellow"}}
}
说明:
- 这个QML文件定义了一个简单的用户界面,包含两个图表(用于显示温度和压力趋势)和一个报警列表。
- 实际应用中,数据会通过C++后端与QML前端进行交互,动态更新图表和报警列表。
3.4 数据处理模块
// data_processing.h
#ifndef DATA_PROCESSING_H
#define DATA_PROCESSING_H#include <vector>
#include <complex>class DataProcessing {
public:static std::vector<float> applyKalmanFilter(const std::vector<float>& input, float processNoise, float measurementNoise);static std::vector<std::complex<float>> performFFT(const std::vector<float>& input);static bool detectAnomaly(const std::vector<float>& data, float threshold);private:static void fft(std::vector<std::complex<float>>& x);
};#endif// data_processing.cpp
#include "data_processing.h"
#include <cmath>std::vector<float> DataProcessing::applyKalmanFilter(const std::vector<float>& input, float processNoise, float measurementNoise) {std::vector<float> filtered(input.size());float estimate = input[0];float errorEstimate = 1.0f;for (size_t i = 0; i < input.size(); ++i) {// 预测步骤float predictedEstimate = estimate;float predictedErrorEstimate = errorEstimate + processNoise;// 更新步骤float kalmanGain = predictedErrorEstimate / (predictedErrorEstimate + measurementNoise);estimate = predictedEstimate + kalmanGain * (input[i] - predictedEstimate);errorEstimate = (1 - kalmanGain) * predictedErrorEstimate;filtered[i] = estimate;}return filtered;
}std::vector<std::complex<float>> DataProcessing::performFFT(const std::vector<float>& input) {size_t n = input.size();std::vector<std::complex<float>> data(n);for (size_t i = 0; i < n; ++i) {data[i] = std::complex<float>(input[i], 0);}fft(data);return data;
}void DataProcessing::fft(std::vector<std::complex<float>>& x) {size_t n = x.size();if (n <= 1) return;std::vector<std::complex<float>> even(n/2), odd(n/2);for (size_t i = 0; i < n/2; ++i) {even[i] = x[2*i];odd[i] = x[2*i+1];}fft(even);fft(odd);for (size_t k = 0; k < n/2; ++k) {std::complex<float> t = std::polar(1.0f, -2 * M_PI * k / n) * odd[k];x[k] = even[k] + t;x[k+n/2] = even[k] - t;}
}bool DataProcessing::detectAnomaly(const std::vector<float>& data, float threshold) {float mean = 0.0f;for (float value : data) {mean += value;}mean /= data.size();float variance = 0.0f;for (float value : data) {variance += (value - mean) * (value - mean);}variance /= data.size();float stdDev = std::sqrt(variance);for (float value : data) {if (std::abs(value - mean) > threshold * stdDev) {return true; // 检测到异常}}return false; // 未检测到异常
}说明:
-
applyKalmanFilter()函数实现了一维卡尔曼滤波器,用于平滑传感器数据。它接受原始数据、过程噪声和测量噪声作为输入,返回滤波后的数据。卡尔曼滤波器通过预测和更新两个步骤,有效地减少了数据中的噪声。 -
performFFT()函数实现了快速傅里叶变换(FFT),用于将时域信号转换为频域。这对于分析设备振动等周期性信号非常有用。该函数使用了递归的 Cooley-Tukey FFT 算法。 -
fft()是一个私有辅助函数,实现了实际的 FFT 算法。它使用分治法递归地计算 FFT。 -
detectAnomaly()函数实现了一个简单的异常检测算法。它计算数据的均值和标准差,然后检查是否有数据点偏离均值超过指定的阈值(以标准差为单位)。如果发现异常数据点,函数返回 true。
这个数据处理模块提供了基本的信号处理和异常检测功能。在实际应用中,您可能需要根据具体需求进行调整和扩展。例如,可以添加更复杂的异常检测算法,如基于机器学习的方法,或者实现更多的信号处理功能,如数字滤波器等。
3.5 系统管理模块
// system_manager.h
#ifndef SYSTEM_MANAGER_H
#define SYSTEM_MANAGER_H#include <string>
#include <vector>class SystemManager {
public:static bool initialize();static bool loadConfiguration(const std::string& configFile);static bool saveConfiguration(const std::string& configFile);static bool updateFirmware(const std::string& firmwareFile);static void logEvent(const std::string& event);static std::vector<std::string> getLogEntries(int count);private:static std::vector<std::string> logEntries;
};#endif// system_manager.cpp
#include "system_manager.h"
#include <fstream>
#include <ctime>std::vector<std::string> SystemManager::logEntries;bool SystemManager::initialize() {// 初始化系统组件// ...logEvent("System initialized");return true;
}bool SystemManager::loadConfiguration(const std::string& configFile) {std::ifstream file(configFile);if (!file.is_open()) {logEvent("Failed to load configuration: " + configFile);return false;}// 读取和解析配置文件// ...logEvent("Configuration loaded: " + configFile);return true;
}bool SystemManager::saveConfiguration(const std::string& configFile) {std::ofstream file(configFile);if (!file.is_open()) {logEvent("Failed to save configuration: " + configFile);return false;}// 保存配置到文件// ...logEvent("Configuration saved: " + configFile);return true;
}bool SystemManager::updateFirmware(const std::string& firmwareFile) {// 实现固件更新逻辑// ...logEvent("Firmware updated: " + firmwareFile);return true;
}void SystemManager::logEvent(const std::string& event) {time_t now = time(0);char* dt = ctime(&now);std::string timestamp(dt);timestamp.pop_back(); // 移除换行符std::string logEntry = timestamp + " - " + event;logEntries.push_back(logEntry);// 如果日志条目过多,删除旧条目if (logEntries.size() > 1000) {logEntries.erase(logEntries.begin());}// 在实际应用中,可能还需要将日志写入文件或数据库
}std::vector<std::string> SystemManager::getLogEntries(int count) {if (count <= 0 || count > logEntries.size()) {return logEntries;}return std::vector<std::string>(logEntries.end() - count, logEntries.end());
}说明:
-
initialize()函数用于初始化系统组件,可以在这里添加各个模块的初始化代码。 -
loadConfiguration()和saveConfiguration()函数分别用于加载和保存系统配置。在实际应用中,您需要实现配置文件的解析和生成逻辑。 -
updateFirmware()函数用于更新系统固件。在实际应用中,您需要实现固件验证、写入和重启等逻辑。 -
logEvent()函数用于记录系统事件。它将事件信息与时间戳一起存储在内存中,并限制了最大日志条目数量。 -
getLogEntries()函数允许获取最近的日志条目,方便查看系统状态和故障诊断。
3.6 数据存储模块
为了实现数据的持久化存储,我们使用SQLite数据库。以下是一个简化的数据存储模块实现:
// data_storage.h
#ifndef DATA_STORAGE_H
#define DATA_STORAGE_H#include <string>
#include <vector>
#include <sqlite3.h>struct SensorData {int64_t timestamp;int sensor_id;float value;
};class DataStorage {
public:DataStorage();~DataStorage();bool initialize(const std::string& dbFile);bool storeSensorData(const SensorData& data);std::vector<SensorData> retrieveSensorData(int sensor_id, int64_t start_time, int64_t end_time);bool backupDatabase(const std::string& backupFile);private:sqlite3* db;
};#endif// data_storage.cpp
#include "data_storage.h"
#include <iostream>DataStorage::DataStorage() : db(nullptr) {}DataStorage::~DataStorage() {if (db) {sqlite3_close(db);}
}bool DataStorage::initialize(const std::string& dbFile) {int rc = sqlite3_open(dbFile.c_str(), &db);if (rc) {std::cerr << "Can't open database: " << sqlite3_errmsg(db) << std::endl;return false;}const char* sql = "CREATE TABLE IF NOT EXISTS sensor_data (""timestamp INTEGER NOT NULL,""sensor_id INTEGER NOT NULL,""value REAL NOT NULL);";char* errMsg = nullptr;rc = sqlite3_exec(db, sql, nullptr, nullptr, &errMsg);if (rc != SQLITE_OK) {std::cerr << "SQL error: " << errMsg << std::endl;sqlite3_free(errMsg);return false;}return true;
}
bool DataStorage::storeSensorData(const SensorData& data) {const char* sql = "INSERT INTO sensor_data (timestamp, sensor_id, value) VALUES (?, ?, ?);";sqlite3_stmt* stmt;int rc = sqlite3_prepare_v2(db, sql, -1, &stmt, nullptr);if (rc != SQLITE_OK) {std::cerr << "Failed to prepare statement: " << sqlite3_errmsg(db) << std::endl;return false;}sqlite3_bind_int64(stmt, 1, data.timestamp);sqlite3_bind_int(stmt, 2, data.sensor_id);sqlite3_bind_double(stmt, 3, data.value);rc = sqlite3_step(stmt);if (rc != SQLITE_DONE) {std::cerr << "Failed to insert data: " << sqlite3_errmsg(db) << std::endl;sqlite3_finalize(stmt);return false;}sqlite3_finalize(stmt);return true;
}std::vector<SensorData> DataStorage::retrieveSensorData(int sensor_id, int64_t start_time, int64_t end_time) {std::vector<SensorData> result;const char* sql = "SELECT timestamp, sensor_id, value FROM sensor_data ""WHERE sensor_id = ? AND timestamp BETWEEN ? AND ? ""ORDER BY timestamp;";sqlite3_stmt* stmt;int rc = sqlite3_prepare_v2(db, sql, -1, &stmt, nullptr);if (rc != SQLITE_OK) {std::cerr << "Failed to prepare statement: " << sqlite3_errmsg(db) << std::endl;return result;}sqlite3_bind_int(stmt, 1, sensor_id);sqlite3_bind_int64(stmt, 2, start_time);sqlite3_bind_int64(stmt, 3, end_time);while ((rc = sqlite3_step(stmt)) == SQLITE_ROW) {SensorData data;data.timestamp = sqlite3_column_int64(stmt, 0);data.sensor_id = sqlite3_column_int(stmt, 1);data.value = sqlite3_column_double(stmt, 2);result.push_back(data);}if (rc != SQLITE_DONE) {std::cerr << "Error retrieving data: " << sqlite3_errmsg(db) << std::endl;}sqlite3_finalize(stmt);return result;
}bool DataStorage::backupDatabase(const std::string& backupFile) {sqlite3* pBackupDB;int rc = sqlite3_open(backupFile.c_str(), &pBackupDB);if (rc != SQLITE_OK) {std::cerr << "Cannot open backup database: " << sqlite3_errmsg(pBackupDB) << std::endl;sqlite3_close(pBackupDB);return false;}sqlite3_backup* pBackup = sqlite3_backup_init(pBackupDB, "main", db, "main");if (pBackup) {sqlite3_backup_step(pBackup, -1);sqlite3_backup_finish(pBackup);}rc = sqlite3_errcode(pBackupDB);sqlite3_close(pBackupDB);return rc == SQLITE_OK;
}说明:
-
retrieveSensorData()函数从数据库中检索指定时间范围内特定传感器的数据。它同样使用预处理语句,并返回一个包含查询结果的向量。 -
backupDatabase()函数创建数据库的备份副本。它使用SQLite的内置备份API来确保数据的一致性。
这个数据存储模块提供了基本的数据持久化功能,包括数据的存储、检索和备份。在实际应用中,您可能需要根据具体需求进行优化和扩展,例如:
- 添加索引以提高查询性能
- 实现数据压缩或归档功能以节省存储空间
- 添加数据完整性检查和错误恢复机制
- 实现数据加密以提高安全性
3.7 网络通信模块
为了实现与上位机或云平台的数据交互,我们可以使用MQTT协议。以下是一个简化的网络通信模块实现,使用Paho MQTT C++客户端库:
// mqtt_client.h
#ifndef MQTT_CLIENT_H
#define MQTT_CLIENT_H#include <string>
#include <mqtt/async_client.h>class MqttClient {
public:MqttClient(const std::string& serverAddress, const std::string& clientId);~MqttClient();bool connect();bool disconnect();bool publish(const std::string& topic, const std::string& payload);bool subscribe(const std::string& topic);private:mqtt::async_client client;mqtt::connect_options connOpts;
};#endif// mqtt_client.cpp
#include "mqtt_client.h"
#include <iostream>MqttClient::MqttClient(const std::string& serverAddress, const std::string& clientId): client(serverAddress, clientId) {connOpts.set_keep_alive_interval(20);connOpts.set_clean_session(true);
}MqttClient::~MqttClient() {disconnect();
}bool MqttClient::connect() {try {mqtt::token_ptr conntok = client.connect(connOpts);conntok->wait();return true;}catch (const mqtt::exception& exc) {std::cerr << "Error: " << exc.what() << std::endl;return false;}
}bool MqttClient::disconnect() {try {client.disconnect()->wait();return true;}catch (const mqtt::exception& exc) {std::cerr << "Error: " << exc.what() << std::endl;return false;}
}bool MqttClient::publish(const std::string& topic, const std::string& payload) {try {client.publish(topic, payload, 1, false)->wait();return true;}catch (const mqtt::exception& exc) {std::cerr << "Error: " << exc.what() << std::endl;return false;}
}bool MqttClient::subscribe(const std::string& topic) {try {client.subscribe(topic, 1)->wait();return true;}catch (const mqtt::exception& exc) {std::cerr << "Error: " << exc.what() << std::endl;return false;}
}这个网络通信模块提供了基本的MQTT客户端功能,包括连接、断开、发布和订阅。在实际应用中,您需要根据具体需求进行扩展,例如:
- 实现消息回调处理
- 添加重连机制
- 实现 QoS 级别的控制
- 添加 SSL/TLS 支持以增强安全性
- 实现消息持久化,以处理网络中断情况
- 添加消息过滤和优先级处理
4. 项目总结
本智能工厂设备监控系统项目整合了多种先进技术,包括嵌入式系统、工业通信协议、数据采集与处理、人机界面设计、数据存储和网络通信等。通过这些模块的协同工作,系统能够实现对工厂设备的全面监控、数据分析和远程管理。
主要特点和优势:
- 高性能数据采集:利用 ARM Cortex-M4 微控制器和高精度 ADC,实现快速、准确的数据采集。
- 可靠的工业通信:支持 Modbus-RTU 和 Profibus-DP 协议,确保与各种工业设备的兼容性。
- 智能数据处理:应用卡尔曼滤波、FFT 分析和异常检测算法,提供深入的数据洞察。
- 直观的人机界面:基于 Qt/QML 的触摸屏界面,提供友好的用户体验。
- 灵活的数据存储:使用 SQLite 数据库,支持本地数据存储和查询。
- 远程监控能力:通过 MQTT 协议实现与云平台的数据交互,支持远程监控和控制。
5. 参考文献
- ARM. (2021). Cortex-M4 Processor. Cortex-M4
- Modbus Organization. (2021). Modbus Application Protocol Specification V1.1b3. http://www.modbus.org/docs/Modbus_Application_Protocol_V1_1b3.pdf
- The Qt Company. (2021). Qt Documentation. Qt Documentation | Home
- SQLite. (2021). SQLite Documentation. SQLite Documentation
- Eclipse Foundation. (2021). Paho MQTT C++ Client Library. Eclipse Paho | The Eclipse Foundation
相关文章:
嵌入式C++、Qt/QML和MQTT:智能工厂设备监控系统的全流程介绍(附代码示例)
1. 项目概述 本项目旨在开发一套先进的智能工厂设备监控系统,集成嵌入式技术、工业通信协议和人机界面等多项技术,实现对工厂设备的全方位实时监控、高精度数据采集和智能化分析。该系统将显著提升工厂设备的运行效率,大幅降低维护成本&…...

监控易V7.6.6.15升级详解8:机房动环管理功能
随着企业IT基础设施的不断发展,机房动环管理成为保障系统稳定运行的关键环节。为了满足广大用户对于机房动环管理的高效、精准需求,监控易系统近期完成了一次重要版本升级。本次升级不仅优化了原有功能,还新增了一系列实用特性,旨…...

C++ | Leetcode C++题解之第232题用栈实现队列
题目: 题解: class MyQueue { private:stack<int> inStack, outStack;void in2out() {while (!inStack.empty()) {outStack.push(inStack.top());inStack.pop();}}public:MyQueue() {}void push(int x) {inStack.push(x);}int pop() {if (outStac…...

Git-Updates were rejected 解决
Git-Updates were rejected 解决 文章目录 1. 杂话2. 问题3. 解决3.1 拉取远程的最新版本(AC)3.2 解决可能的冲突3.3 提交3.4 再次推送 1. 杂话 大伙儿应该都用过Git吧,具体是个啥东西我就不说了哈。之前我在用git push的时候遇到了这个报错&…...

Java常用的API_02(正则表达式、爬虫)
Java正则表达式 七、正则表达式7.1 格式7.1.1 字符类注意字符类示例代码1例2 7.1.2 预定义字符预定义字符示例代码例2 7.1.3 区别总结 7.2 使用Pattern和Matcher类与直接使用String类的matches方法的区别。(1) 使用Pattern和Matcher类示例代码 ÿ…...

2024最新图纸加密软件Top5排行榜
“小张,你听说了吗?最近我们部门又发生了一起图纸泄露事件,真是让人头疼。”小李眉头紧锁,手中紧握着一份重要的设计图纸。 “是啊,这图纸可是咱们的心血,一旦泄露出去,后果不堪设想。”小张回…...
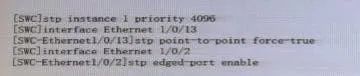
每日一练 - IEEE 802.1Q中STP协议
01 真题题目 关于设备 SWC 的上述配置说法正确的是 (多选) A.SWC 为根交换机 B.stp instance 1 priority 4096 是配置交换机在实例 1 中的优先级为 4096, 该优先级默认为0 C.gtp edged-port enable 该命令是启用交换机 5WC 的 Ethernet 1/0/2 为边缘端口 D.sto …...

设计模式--工厂设计模式
什么是工厂模式? 工厂模式是一种创建型设计模式,它定义了一个用于创建对象的接口,但由子类决定要实例化的类是哪一个。这样,工厂方法模式让类的实例化延迟到子类。通过工厂方法模式,我们可以在不修改现有代码的情况下…...

消息队列-MQ
消息队列-MQ 1、什么是MQ?为什么要使用MQ?2、MQ有什么优缺点?3、有哪些常见的MQ实现?都有什么区别?4、MQ如何保证消息的可靠传输?消息丢了怎么办?5、如何保证消息的顺序性?6、如何解决消息队列的延时以及过期失效问题?7、消息队列满了以后该怎么处理?8、假设有几百万…...

近源渗透简介
什么是近源渗透 通过乔装、社工等方式实地物理侵入企业办公区域,通过其内部各种潜在攻击面(如Wi-Fi网络、RFID门禁、暴露的有线网口、USB接口等)获得“战果”,最后以隐秘的方式将评估结果带出上报,由此证明企业安全防…...
13 IP层协议-网际控制报文协议ICMP
计算机网络资料下载:CSDNhttps://mp.csdn.net/mp_blog/creation/editor/140148186 为了更有效的转发IP数据报和提高交付成果的机会,在网际层使用了网际控制报文协议ICMP。ICMP允许主机或路由器报告差错情况和提供有关异常情况的报告。ICMP不是高层协议数…...
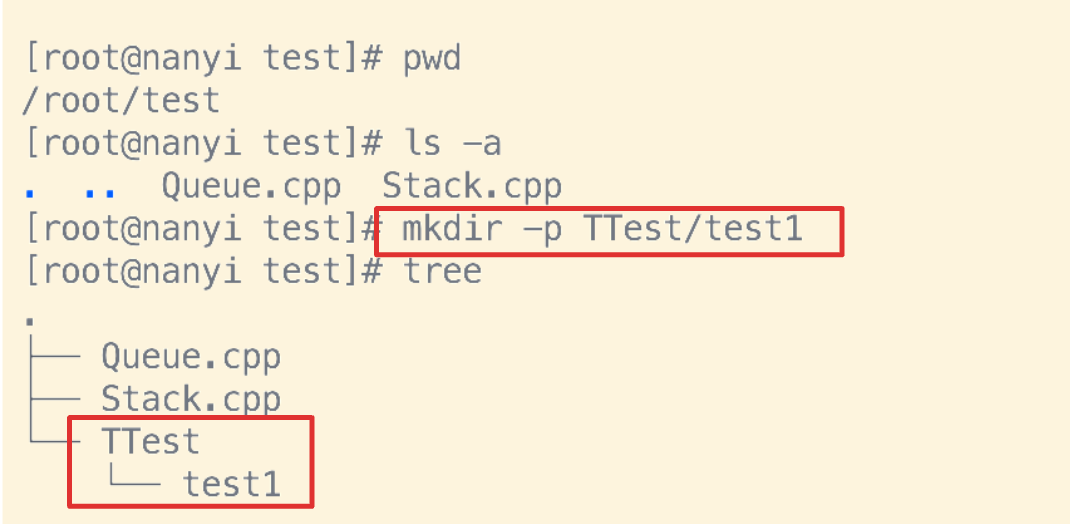
第一节Linux常见指令
目录 1.Linux下基本指令 ls指令 pwd 命令 cd 指令 知识点:理解树形结构 touch 指令 mkdir指令(重要) rmdir指令 && rm指令(重要) 知识点:ls file* 可以找到当前目录下任何以file开头的文件编辑 知识点:热键 man指令()重要 补充知识点:nano cp…...

嵌入式全栈设计思路:STM32G4+ChibiOS+FreeRTOS+PID控制+PFC算法构建高效智能电源管理系统(附代码示例)
智能电源管理系统是一个基于STM32G4微控制器的高性能数字电源控制解决方案。本项目旨在设计一个功能全面、高效稳定的电源管理系统,可广泛应用于工业控制、新能源、通信设备等领域。 1.1 系统主要特点 高精度数字电源控制:利用STM32G4的高性能ADC和定时器,实现精确…...

Linux驱动开发-04LED灯驱动实验(直接操作寄存器)
一、Linux 下LED 灯驱动原理 Linux 下的任何外设驱动,最终都是要配置相应的硬件寄存器。驱动访问底层的硬件除了使用内存映射将物理地址空间转化为虚拟地址空间,去进行读写修改,还可以通过各种子系统函数去进行操作 1.1 地址映射 MMU 全称…...

Linux命令更新-sort 和 uniq 命令
简介 sort 和 uniq 都是 Linux 系统中常用的文本处理命令。 sort 命令用于对文件内容进行排序。 uniq 命令用于去除文件中重复出现的行。 1. sort 命令 命令格式 sort [选项] [文件]选项: -n: 按照数字进行排序 -r: 反向排序 -c: 统计每个元素出现的次数 -…...
【密码学】密码学数学基础:剩余系
不得不啃的密码学数学基础之剩余系是个啥?数学里面有好多的定义都有前置的数学概念,要想弄懂剩余系还得先说说“同余”。 一、同余 那么“同余”有是个什么呢?在谈论“同余”之前,我们先圈定个讨论的范围。接下来讨论的都是整数集…...

量化发展历史简述,QMT/PTrade+恒生UFT、LDP极速柜台适用哪些情形?
量化发展简述 1.2004年萌发阶段:策略局限在量化择时,量化选股等; 光大保德信量化核 心基金 上投摩根阿尔法基 金 金融危机,海归引入。 2.2010量化元年:中低频交易为主,主要依靠套利、对冲、多因子策略等…...

linux服务器anaconda安装及环境变量配置
1.下载anaconda Index of /可以在此链接中下载所需要的anaconda安装文件。使用一下的命令进行下载: wget https://repo.anaconda.com/archive/Anaconda3-2024.06-1-Linux-x86_64.sh2.安装anaconda 进入到下载的目录下,使用下面的的命令进行安装&#…...

如何在 Objective-C 中实现多态性,并且它与其他面向对象编程语言的多态性实现有何差异?
在Objective-C中,多态性可以通过使用父类的指针来调用子类的方法来实现。具体来说,可以定义一个父类的指针,然后将子类的实例赋值给这个指针。这样,即使使用父类的指针来调用方法,实际上会调用子类的方法。 需要注意的…...

阿里云OSS简单应用
前提条件 购买OSS标准存储包之后,就可以使用OSS的各种服务了 1 获取自己的OSS Endpoint OSS访问域名和数据中心_对象存储(OSS)-阿里云帮助中心 在官方的表格上找到自己OSS标准存储包对应的外网Endpoint即可 2 创建自己的阿里云Access Key ID 和 Access Key Secret …...

焊接型球头杆端关节轴承鱼眼接头缺陷检测数据集VOC+YOLO格式3205张4类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件)图片数量(jpg文件个数):3205标注数量(xml文件个数):3205标注数量(txt文件个数):3205标注类别…...

用达尔文进化论重构神经网络设计
1. 这不是科幻脑洞,而是一次严肃的思想实验 “What if Charles Darwin Built a Neural Network?”——这个标题乍看像咖啡馆里哲学系学生的即兴发问,但在我过去十年拆解过37个跨学科AI项目、亲手复现过12种生物启发式学习模型后,我敢说&…...

分布式/集群/微服务
分布式:将一个系统划分为多个子系统,每个子系统在不同的服务器上运行,并通过网络通信进行协作集群:一组相互独立的计算机系统协同工作,共同提供服务或处理任务,它们之间可以共享资源和负载均衡微服务&#…...

AspectCore-Framework高级特性:参数拦截、异步切面、作用域管理
AspectCore-Framework高级特性:参数拦截、异步切面、作用域管理 【免费下载链接】AspectCore-Framework AspectCore is an AOP-based cross platform framework for .NET Standard. 项目地址: https://gitcode.com/gh_mirrors/as/AspectCore-Framework Aspec…...

微信聊天数据本地化:开源工具WeChatMsg的技术架构与数据主权实践
微信聊天数据本地化:开源工具WeChatMsg的技术架构与数据主权实践 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trendin…...

怎样快速去掉照片背景?2026年AI抠图工具实测对比与使用指南
还在为复杂的照片背景发愁?想要快速批量处理多张照片?本文将带你深入了解2026年最新的照片去背景方法,从零基础的在线工具到专业级别的桌面软件,再到智能AI抠图方案,帮你找到最适合自己的解决方案。快速去背景的核心方…...

GRETNA脑网络分析工具包:MATLAB中的图论网络分析终极指南
GRETNA脑网络分析工具包:MATLAB中的图论网络分析终极指南 【免费下载链接】GRETNA A Graph-theoretical Network Analysis Toolkit in MATLAB 项目地址: https://gitcode.com/gh_mirrors/gr/GRETNA GRETNA(Graph-theoretical Network Analysis To…...

如何在RK35XX设备上部署稳定高效的Ubuntu系统?
如何在RK35XX设备上部署稳定高效的Ubuntu系统? 【免费下载链接】ubuntu-rockchip Ubuntu for Rockchip RK35XX Devices 项目地址: https://gitcode.com/gh_mirrors/ub/ubuntu-rockchip 想要在Rockchip RK35XX系列开发板上获得接近原生Ubuntu的体验吗…...

抖音资源下载新体验:douyin-downloader一站式解决方案
抖音资源下载新体验:douyin-downloader一站式解决方案 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback suppo…...

Photoshop到URP的法线验证闭环:跨引擎法线贴图精准调试指南
1. 这不是个“一键生成法线”的玩具,而是一套跨引擎、跨工作流的材质验证闭环你有没有遇到过这样的情况:在 Photoshop 里辛苦调出一张完美的 Normal Map,导入 Unity 后却发现高光方向反了、边缘发灰、贴图在 Decal 上拉伸变形,甚至…...