【学习笔记】无人机(UAV)在3GPP系统中的增强支持(八)-通过无人机进行无线接入
引言
本文是3GPP TR 22.829 V17.1.0技术报告,专注于无人机(UAV)在3GPP系统中的增强支持。文章提出了多个无人机应用场景,分析了相应的能力要求,并建议了新的服务级别要求和关键性能指标(KPIs)。

下载资源:3GPPTR22.829R17EnhancementforUnmannedAerialVehicles资源-CSDN文库
主要内容包括:
- 无人机高清视频直播:支持4K乃至8K视频实时上传,要求低延迟、高可靠性和精确定位,以避免事故。
- 无人机作为空中基站:在灾难监测等场景中,无人机携带基站设备,提供临时覆盖,强调快速部署和灵活配置。
- 无人机命令与控制(C2)通信:定义了直接C2、网络辅助C2等多种模式,强调QoS保障和安全性,以适应不同飞行环境和需求。
- 无人机与地面用户共存:探讨了无人机与增强型移动宽带(eMBB)用户共享网络资源时的干扰最小化问题。
- 自主无人机控制:AI系统通过5G网络控制无人机,对上下行传输提出了高带宽和低延迟要求,并需要高精度定位信息。
- 无人机群管理:支持无人机群在物流等领域的应用,强调群管理和协同作业能力。
- 服务可用性和体验保障:提出通过边缘计算和路径优化,确保无人机通信服务的低延迟和高可靠性。
文章最后总结了无人机通信服务的潜在要求,并建议3GPP制定相关服务规范,以更好地支持无人机生态系统的发展。
5.7 通过无人机进行无线接入
5.7.1 描述
目前可用的无人机飞行时间有限,通常在10分钟到1小时之间。由于重量、电池电量、有效载荷、空气动力学、可控性以及法规等之间的复杂关系,飞行时间不能任意或无限增加。
当无人机作为飞行无线电接入网络时,由于无线电接入网络设备的有效载荷,无人机的重量会增加。反过来,这将进一步减少无人机的实际可实现飞行时间。
无人机作为移动无线电接入网络平台的有效性将进一步受到部署场景的影响。例如,地面无线电接入网络设备无法安装的地区,通常需要飞行无线电接入网络。因此,无人机必须从基地飞往偏远地区,并且必须在耗尽电量之前飞回基地。如下图所示。

图5.7.1-1:无人机操作时间分析。
图中每项操作的时间总和应小于无人机的最大飞行时间。那么,飞行无线电接入网络实际可操作的时间将小于该时间。
因此,为了通过无人机提供连续的通信服务,需要多个无人机,即在部署的悬停无线电接入网络电池耗尽之前,应更换其他无人机。
5.7.2 前提条件
悬停无线电接入网络(RAN)由携带无线电接入网络设备的无人机实现。它被派往没有通信基础设施的地区。
由于技术限制,悬停RAN的最大飞行时间为1小时。不使用时,悬停RAN在中央基地进行保存和充电。
5.7.3 服务流程
紧急救援行动在树林中开始,那里没有安装有线通信设备。为了协助救援人员之间的通信,决定向该地区派遣悬停RAN。悬停RAN从中央基地飞往救援区需要15分钟。以下是事件的时间表。
- 上午12:00:无人机1装备悬停RAN。无人机1从中央基地起飞,前往救援区。
- 上午12:15:无人机1到达救援区。安装在无人机1上的悬停RAN开始运行。因为无人机1的位置有回程,所以由悬停RAN服务的用户设备(UE)可以连接到远程操作控制服务器。为了节省电力,悬停RAN会根据它需要服务的用户调整其覆盖范围。由于回程连接是通过无线介质提供的,因此有必要有效利用此回程来传送信令和用户数据。由于无人机上的电力容量有限,这一点尤其重要。随着设备功耗的增加,飞行时间将缩短。
- 上午12:25:无人机2也配备了悬停RAN。无人机2从中央基地起飞,前往救援区。
- 上午12:40:无人机2到达救援区。安装在无人机2上的悬停RAN开始运行。当无人机2上的悬停RAN正在设置时,应将对无人机1上悬停RAN服务的UE的影响降至最低。例如,由于无人机1和无人机2的接近,应尽量减少悬停RAN之间的干扰。此外,当UE的控制从无人机1上的悬停RAN转移到无人机2时,悬停RAN之间的信息交换应迅速且最小化。切换程序不应造成不必要的延迟、数据转发和信令。在上下文传输完成后,无人机2的悬停RAN开始为无人机1的悬停RAN服务的UE提供服务。
- 上午12:41:无人机1离开救援区。
- 上午12:50:无人机3从中央基地起飞,接替无人机2的角色。
- 上午12:56:无人机1抵达中央基地并开始充电。

图5.7.3-1:无人机的更换。
5.7.4 后续条件
在地面救援行动进行期间,救援区域内的UE将获得连续的连接服务。
5.7.5 对现有服务/功能的潜在影响或交互
关于无线电覆盖范围的调整,TS 25.463规定了远程电气倾斜(RET)天线应用部分(RETAP)信令。本规范适用于UTRAN,并不适用于无人机上的无线电接入网络。
5.7.6 潜在的新要求
[P.R.5.7-001] 3GPP系统应能够提供支持UxNB的方法。
[P.R.5.7-002] 3GPP系统应能够提供最小化UxNB功耗的方法(例如优化操作参数、优化流量传输)。
[P.R.5.7-003] 当服务UxNB发生变化时,3GPP系统应能够提供优化信令的方法。
[P.R.5.7-004] 3GPP系统应尽量减少近距离UxNB之间的干扰。
往期内容:
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(一)-3GPP TR 22.829 V17.1.0技
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(一)-3GPP TR 22.829 V17.1.0技
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(二)-支持高分辨率视频直播应用-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(三)-机上无线电接入节点无人机-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(四)-无人机系统(UAS)命令与控制(C2)通信用例-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(五)-同时支持无人机和eMBB用户数据传输的用例-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(六)-人工智能控制的自主无人机用例-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(七)-通过无人机实现无线接入的独立部署-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(八)-通过无人机进行无线接入-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(九)-无人机服务区分离-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(十)-服务体验保证的用例-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(十一)-无人机服务可用性用例需求-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(十二)-无人机群在物流中的应用-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(十三)-更换无人机控制器-CSDN博客
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(十四)-无人机操控关键绩效指标(KPI)框架-CSDN博客
相关文章:
【学习笔记】无人机(UAV)在3GPP系统中的增强支持(八)-通过无人机进行无线接入
引言 本文是3GPP TR 22.829 V17.1.0技术报告,专注于无人机(UAV)在3GPP系统中的增强支持。文章提出了多个无人机应用场景,分析了相应的能力要求,并建议了新的服务级别要求和关键性能指标(KPIs)。…...

PTrade量化交易终端常见问题11
盈亏分析为空。 回测详情内,盈亏分析内为空。 1、回测正常结束,并且产生多笔交易; 2、盈亏分析热力图无任何内容,检查支持版本,盈亏分析是在需求单号:202211114089,于PTrade1.0-QTV202301.01.…...

被动的机器人非线性MPC控制
MPC是一种基于数学模型的控制策略,它通过预测系统在未来一段时间内的行为,并求解优化问题来确定当前的控制输入,以实现期望的控制目标。对于非线性系统,MPC可以采用非线性模型进行预测和优化,这种方法被称为非线性模型…...

什么样的服务器是合乎直销网站标准
现在社会的发展,有着越来越多的人想要利用互联网来做直销。做好直销行业系统解决方案离不开好的服务器支持,服务器的的稳定性和速度是直接影响网站后期运作,可以看做是网站的根基。 做网站直销选择租用服务器需要注意的几点要素 一些大的直销互联网公司如安利、雅芳、康宝莱、玫…...

python 语法学习 day13
一.判断题错题反思 1.创建对象是通过调用构造方法完成的 3.python方法定义的第一个参数是self 4.一个对象只能有一个实例变量(错) 5.在python类中,构造方法的名称为__init__ 6.从类定义之外直接访问实例变量是不好的程序设计风格 7.在python中定义类是时…...

Spring MVC中Restful风格引入
一,RESTful概述 在现代Web应用开发中,RESTful架构风格已成为一种标准实践,特别是在构建可扩展的Web服务时。Spring MVC提供了全面的支持来构建遵循REST原则的Web服务。我在此介绍如何在Spring MVC中实现RESTful风格的Web服务,并通…...

C# Winform 系统方案目录的管理开发
在做一个中等复杂程度项目时,我们通常有系统全局配置,还要有对应的方案目录的管理和更新。 比如我们有如下需求:开发一个方案管理,可以新建、打开和保存方案,同时还需要保存方案中的各种文件。我设计的采用目录管理和…...

算法-二叉树常见问题详解
文章目录 1. 二叉树的三种遍历方式的实质2. 二叉树的序列化与反序列化3. 根据前序中序反序列创建二叉树4. 二叉树的路径问题5. LCA公共祖先问题6. 二叉搜索树的LCA问题7. 验证搜索二叉树8. 修建搜索二叉树9. 二叉树打家劫舍问题 1. 二叉树的三种遍历方式的实质 这个相信大家都不…...

【流媒体】 通过ffmpeg硬解码拉流RTSP并播放
简介 目前RTSP拉流是网络摄像头获取图片数据常用的方法,但通过CPU软解码的方式不仅延时高且十分占用资源,本文提供了一种从网络摄像头RTSP硬解码的拉流的方法,并且提供python代码以便从网络摄像头获取图片进行后续算法处理。 下载ffmpeg F…...

Go语言指针及不支持语法汇总
本文为Go语言中指针定义和示例及不支持语法汇总。 目录 指针 定义指针 关键字new定义 函数返回指针 空指针 Go不支持语法汇总 总结 指针 Go语言也有指针,结构体成员调用时,obj.name Go语言在使用指针时,会使用内容的垃圾回收机制&am…...

Why can‘t I access GPT-4 models via API, although GPT-3.5 models work?
题意:为什么我无法通过API访问GPT-4模型,尽管GPT-3.5模型可以工作? 问题背景: Im able to use the gpt-3.5-turbo-0301 model to access the ChatGPT API, but not any of the gpt-4 models. Here is the code I am using to tes…...
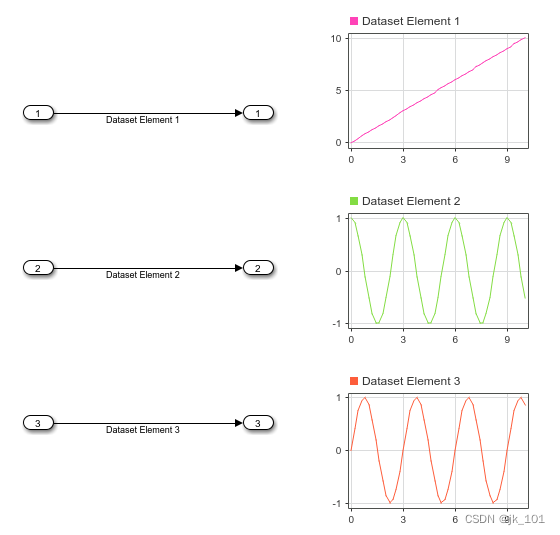
MATLAB中Simulink.SimulationData.Dataset用法
目录 语法 说明 示例 访问使用Dataset格式记录的数据 打开模型vdp 使用 Dataset 对象来组合模拟输入信号 Simulink.SimulationData.Dataset的功能是访问已记录的模拟数据或组合模拟输入数据。 语法 ds Simulink.SimulationData.Dataset ds Simulink.SimulationData.Da…...

Spring Security学习笔记(一)Spring Security架构原理
前言:本系列博客基于Spring Boot 2.6.x依赖的Spring Security5.6.x版本 Spring Security中文文档:https://springdoc.cn/spring-security/index.html 一、什么是Spring Security Spring Security是一个安全控制相关的java框架,它提供了一套全…...

nginx的access.log日志输出请求数
适用格式 #log_format main $remote_addr - $remote_user [$time_local] "$request" # $status $body_bytes_sent "$http_referer" # "$http_user_agent" "$http_x_forwarded_for"; 形如: 12…...

前端网站(三)-- 记事本【附源码】
开篇(请大家看完):此网站写给挚爱,后续页面还会慢慢更新,大家敬请期待~ ~ ~ 此前端框架,主要侧重于前端页面的视觉效果和交互体验。通过运用各种前端技术和创意,精心打造了一系列引人入胜的页面…...

java——Junit单元测试
测试分类 黑盒测试:不输入代码,给输入值,看程序能够给出期望的值。 白盒测试:写代码,关注程序具体执行流程。 JUnit单元测试 一个测试框架,供java开发人员编写单元测试。 是程序员测试,即白…...

Scala学习笔记17: Try与异常处理
目录 第十七章 Try与异常处理1- 异常的抛出和捕获1. 异常抛出2. 异常捕获 2- 函数式的错误处理1. Try 类型2. 使用 Try3. 处理 Try 结果4. Try 的常用方法5. Try 的优势总结 end 第十七章 Try与异常处理 1- 异常的抛出和捕获 Scala 的异常处理机制与 Java非常相似, 但也有一些…...

内网信息收集——MSF信息收集浏览器记录配置文件敏感信息
文章目录 一、配置文件敏感信息收集二、浏览器密码&记录三、MSF信息收集 域控:windows server 2008 域内机器:win7 攻击机:kali 就是红日靶场(一)的虚拟机。 一、配置文件敏感信息收集 使用searchall64.exe&#…...

C++ STL中的std::remove_if 的用法详解
在现代C++编程中,标准模板库(STL)提供了一系列功能强大的算法,这些算法极大地简化了日常的编程任务。其中,std::remove_if是一个非常实用的函数,它允许我们从容器中移除满足特定条件的所有元素。本文将深入探讨std::remove_if的使用方法,并通过一个具体的例子——基于St…...

基于AT89C51单片机的16×16点阵LED显示器字符滚动显示设计(含文档、源码与proteus仿真,以及系统详细介绍)
本篇文章论述的是基于AT89C51单片机的1616点阵LED显示器字符滚动显示设计的详情介绍,如果对您有帮助的话,还请关注一下哦,如果有资源方面的需要可以联系我。 目录 仿真效果图 仿真图 代码 系统论文 资源下载 设计的内容和要求 熟悉51系…...

Unity签到系统架构设计:配置驱动与状态同步实践
1. 这不是个“签到页面”,而是一套可落地的用户留存引擎很多人看到“Unity七日签到”第一反应是:不就是做个UI面板,点七次按钮,发七种奖励?我试过——真这么干,上线三天就被运营打回来重做。原因很简单&…...

【Coze工作流】零代码做AI自动化,小白也能5分钟上手
一、问题背景:手工做重复AI任务太累,想自动化但不会写代码在日常办公或者内容创作中,很多人都有过这样的痛点:每天要重复打开各种AI工具。比如你要写一篇爆款文章,先要找AI找选题,再让AI写大纲,…...

KMS_VL_ALL_AIO:智能激活脚本的完整使用指南
KMS_VL_ALL_AIO:智能激活脚本的完整使用指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO KMS_VL_ALL_AIO是一款基于微软官方KMS协议开发的智能激活脚本,为Windows系统…...

3个关键问题揭示:为什么你需要DLSS版本管理器提升游戏体验
3个关键问题揭示:为什么你需要DLSS版本管理器提升游戏体验 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 你是否曾因游戏卡顿而烦恼?是否想知道为什么别人的游戏画面更流畅?DLSS Sw…...

如何告别网盘限速?9大主流平台直链解析完整指南
如何告别网盘限速?9大主流平台直链解析完整指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 /…...

保姆级教程:在Ubuntu上配置Frida环境,搞定Android App的签名与CRC校验
从零构建Ubuntu下的Android逆向工作流:Frida实战签名与CRC校验 当第一次尝试在Linux环境下搭建Android逆向工具链时,我花了整整三天时间解决各种依赖冲突和设备连接问题。这份经历让我意识到,一个完整的Ubuntu环境配置指南对逆向新手有多重要…...

CANN/pypto量化矩阵乘法
pypto.scaled_mm 【免费下载链接】pypto PyPTO(发音: pai p-t-o):Parallel Tensor/Tile Operation编程范式。 项目地址: https://gitcode.com/cann/pypto 产品支持情况 产品是否支持Ascend 950PR/Ascend 950DT√ 功能说明 实现mat_…...

SVM实战调参指南:从标准化、核函数到支持向量解读
1. 这不是教科书里的SVM,而是我亲手调过37次参数后才敢写的入门实录Support Vector Machine(SVM)这个词,第一次见是在三年前的某次算法面试里。面试官问:“你说说SVM为什么叫‘支持向量’?”我张了张嘴&…...

如何用openpilot升级你的驾驶体验:让300+车型秒变智能座驾
如何用openpilot升级你的驾驶体验:让300车型秒变智能座驾 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_Tren…...

2026 最新 Web 安全入门教程 零基础全面吃透 Web 攻防
“未知攻,焉知防”——真正的安全始于理解攻击者的思维 在日益数字化的世界中,Web安全工程师已成为企业防护体系的“数字盾牌”。本文将提供一条清晰的进阶路径,助你在2025年的网络安全领域脱颖而出。 一、认知篇:理解安全本质 …...