KITTI 3D 数据可视化
引言
KITTI 视觉基准测试套件(KITTI Vision Benchmark Suite)提供了大量用于理解自动驾驶场景的工具。尤其是3D数据可视化在分析和解释传感器(如激光雷达)与环境的复杂交互中起到了至关重要的作用。本文将详细探讨KITTI数据集中3D数据可视化的基本方面,涵盖齐次变换、点云、相机和激光雷达的标定以及鸟瞰图生成等技术。
1. 齐次变换
齐次变换在传感器数据集成中扮演着重要角色,特别是在处理多个传感器数据时(如激光雷达和摄像头)。齐次变换通过一个统一的矩阵将旋转和平移结合起来,简化了坐标变换过程。
1.1 为什么使用齐次变换?
在自动驾驶技术中,传感器的数据需要从一个参考坐标系转换到另一个参考坐标系,比如从激光雷达坐标系到车辆坐标系。齐次变换矩阵通过一个4x4矩阵实现这一点,其中包括一个3x3的旋转矩阵和一个平移向量,使得矩阵乘法可以一次性完成旋转和平移。
1.2 齐次变换的组成
- 旋转矩阵(3x3): 定义了空间中的方向变换。
- 平移向量(3x1): 定义了空间中的位置变换。
这种变换使得处理多传感器数据和执行复杂的空间操作变得更为直接和高效。例如,给定一个点 ([x, y, z]) 在激光雷达坐标系中的坐标,通过齐次变换可以将其转换到车辆坐标系中的坐标。
1.3 齐次变换的数学表示
齐次变换矩阵 (\mathbf{T}) 可以表示为:
[
\mathbf{T} = \begin{bmatrix}
\mathbf{R} & \mathbf{t} \
\mathbf{0}^T & 1
\end{bmatrix}
]
其中,(\mathbf{R}) 是旋转矩阵,(\mathbf{t}) 是平移向量。对于一个齐次坐标 (\mathbf{P} = [x, y, z, 1]^T),其变换后的坐标 (\mathbf{P’}) 通过矩阵乘法 (\mathbf{P’} = \mathbf{T} \mathbf{P}) 计算得到。
2. 点云数据与可视化
点云数据是激光雷达传感器捕获的核心数据格式,记录了周围环境的三维空间点。每个点不仅包含位置信息(x, y, z 坐标),还可能包含颜色和强度等信息,这有助于更好地理解和分析场景。
2.1 点云数据的采集
激光雷达通过发射激光脉冲并测量返回时间来确定每个点的距离和方向。多个脉冲形成的集合即为点云数据。点云数据为后续的环境建模和障碍物检测提供了基础。
2.2 点云数据的处理
点云数据的处理通常包括以下步骤:
- 预处理: 过滤噪声和异常点,提取有用信息。
- 配准: 将不同时间或不同传感器采集的点云对齐到同一个坐标系。
- 分割: 将点云分割成不同的部分,如地面、建筑物和车辆等。
- 特征提取: 从点云中提取有意义的特征用于后续分析。
2.3 点云数据的可视化
点云数据本身难以直接理解,因此需要转换为更容易消化的格式,如2D图像或3D模型。在KITTI数据集中,可以利用各种技术将点云转换为图像平面上的视图或生成鸟瞰图(bird’s eye view),后者特别适用于路面和障碍物的直观表示。
3. 鸟瞰图的生成
鸟瞰图通过从点云中提取顶部视角的信息,创建了一个二维的地图表示。这种视图在路径规划和障碍物检测中非常有用。鸟瞰图生成的关键在于忽略Z坐标(高度),并聚焦于X和Y坐标,从而提供一个清晰的顶视图布局。
3.1 鸟瞰图的优点
- 直观性强: 提供了一个简洁的环境概览,易于理解和分析。
- 实用性高: 在自动驾驶中的路径规划、导航和障碍物检测等任务中具有重要应用价值。
3.2 鸟瞰图的实现
生成鸟瞰图通常涉及以下步骤:
- 数据转换: 将激光雷达点云数据转换到车辆坐标系。
- 投影处理: 忽略Z轴,将点云投影到XY平面。
- 数据滤波: 根据需要过滤不相关或噪声点,提高鸟瞰图的质量。
- 图像生成: 将投影后的点云数据转换为二维图像。
4. 相机和激光雷达的标定
为了在3D空间中精确重建和可视化环境,需要精确的相机和激光雷达之间的标定。这包括了外部参数(描述相机与激光雷达之间物理位置和方向的变换)和内部参数(描述相机本身的焦距、光学中心等属性)。
4.1 标定的重要性
准确的标定确保了从两种传感器获得的数据能在同一个坐标系中正确对齐,从而提高数据融合的准确性和效果。这对于自动驾驶系统的感知模块至关重要。
4.2 标定方法
在KITTI数据集中,通常使用棋盘格方法进行相机标定。这种方法通过拍摄不同角度的棋盘格,利用棋盘格角点的已知几何特性来计算相机参数。激光雷达与相机的联合标定步骤如下:
- 相机内参标定: 使用棋盘格图像计算相机的内参矩阵。
- 相机外参标定: 通过多张棋盘格图像计算相机在不同视角下的姿态。
- 激光雷达标定: 使用地面真实点与激光雷达点的对齐关系计算激光雷达的外参。
- 联合标定: 综合相机和激光雷达的标定结果,得到两者之间的变换矩阵。
4.3 实践中的挑战
标定过程中面临诸多挑战,例如传感器安装位置的变化、环境光线的影响以及棋盘格识别的精度等。为了确保标定结果的可靠性,通常需要多次实验和优化。
5. 数据融合与应用
在完成传感器标定后,下一步是将多传感器数据进行融合。数据融合不仅包括几何信息的对齐,还涉及到时间同步、数据过滤和特征提取等多方面内容。
5.1 数据融合技术
- 时间同步: 确保来自不同传感器的数据在同一时间点采集,避免时序误差。
- 空间对齐: 利用标定结果,将不同传感器的数据映射到同一坐标系。
- 信息融合: 综合利用多传感器的数据,提高环境感知的准确性和鲁棒性。
5.2 应用实例
数据融合在自动驾驶中的应用非常广泛,例如:
- 障碍物检测: 通过融合激光雷达和相机数据,提高对障碍物的检测率和识别精度。
- 路径规划: 利用多传感器数据生成高精度地图,辅助车辆进行路径规划。
- 环境感知: 提供更全面和准确的环境信息,支持自动驾驶决策系统。
6. 总结
KITTI 3D 数据可视化不仅限于将点云转换为图像或模型,它还涉及复杂的数据处理和分析,包括传感器标定、坐标变换等。通过这些高级技术,研究人员和工程师能够更好地理解和开发用于自动驾驶车辆的算法和系统。随着技术的不断进步,我们预期这些可视化工具将变得更加精准和高效,为未来的自动驾驶技术铺平道路。
通过本文的详细介绍,我们可以看到3D数据可视化在自动驾驶研究中的重要性,以及如何通过齐次变换、点云处理和
传感器标定等技术实现这一目标。希望本文能够为研究人员和开发人员提供有价值的参考,推动自动驾驶技术的进一步发展。
相关文章:

KITTI 3D 数据可视化
引言 KITTI 视觉基准测试套件(KITTI Vision Benchmark Suite)提供了大量用于理解自动驾驶场景的工具。尤其是3D数据可视化在分析和解释传感器(如激光雷达)与环境的复杂交互中起到了至关重要的作用。本文将详细探讨KITTI数据集中3…...

旅游数据可视化:免费工具让复杂数据变得简单易懂
随着旅游业的蓬勃发展,海量的数据如同繁星点点,记录着每一位旅者的足迹与偏好。然而,如何将这些复杂的数据转化为直观、易懂的信息,为旅游企业精准决策、为消费者提供更加个性化的服务,成为了行业内外共同关注的焦点。…...

数据结构进阶:使用链表实现栈和队列详解与示例(C, C#, C++)
文章目录 1、 栈与队列简介栈(Stack)队列(Queue) 2、使用链表实现栈C语言实现C#语言实现C语言实现 3、使用链表实现队列C语言实现C#语言实现C语言实现 4、链表实现栈和队列的性能分析时间复杂度空间复杂度性能特点与其他实现的比较…...

【线程系列之五】线程池介绍C语言
一、基本概念 1.1 概念 线程池(Thread Pool)是一种基于池化技术管理线程的机制,旨在减少线程创建和销毁的开销,提高系统资源的利用率,以及更好地控制系统中同时运行的线程数量。线程池通过预先创建一定数量的线程&am…...

【学习css3】使用flex和grid实现等高元素布局
过往的实现方法是使用浮动加计算布局来实现,当flex和grid问世时,这一切将变得简单起来 一、简单的两列实现 1、先看页面效果 2、css代码 .container {padding: 10px;width: 100ch;margin: 0 auto;box-shadow: inset 0 0 0 2px #ccc;}.column {margin: 2…...

如何防止Eclipse格式化程序在行注释开头插入空格
格式化前: //foo bar 格式化后: // foo bar 这种看着不是很舒服。如果不让格式化时自动在注释符后面插入空格呢? 要在Eclipse中进行代码格式化时防止在行注释(//)后面自动增加空格,可以通过调整…...

Nextjs 调用组件内的方法
在 Next.js 中,如果你想从一个组件外部调用组件内部的方法,可以使用 React 的 useRef 钩子来引用组件实例并调用其方法。这种方法主要适用于类组件,但也可以用于函数组件,通过将方法暴露在 ref 对象上。 以下是一个示例ÿ…...

ip地址是电脑还是网线决定的
在数字化时代的浪潮中,网络已经成为了我们日常生活和工作不可或缺的一部分。当我们谈论网络时,IP地址无疑是一个核心的概念。然而,关于IP地址的分配和决定因素,很多人可能存在误解。有些人认为IP地址是由电脑决定的,而…...

Hadoop中HDFS、Hive 和 HBase三者之间的关系
HDFS(Hadoop Distributed File System)、Hive 和 HBase 是 Hadoop 生态系统中三个重要的组件,它们各自解决了大数据存储和处理的不同层面的问题。我们用大白话来解释这三个组件之间的关系: HDFS - 数据的仓库: HDFS 是…...

opencv—常用函数学习_“干货“_10
目录 二七、离散余弦变换 执行离散余弦变换 (dct) 和逆变换 (idct) 解释 实际应用 JPEG压缩示例(简化版) 二八、图像几何变换 仿射变换 (warpAffine 和 getAffineTransform) 透视变换 (warpPerspective 和 getPerspectiveTransform) 旋转变换 (g…...

Jmeter二次开发Demo
Jmeter二次开发Demo 前言 在上一集,我们已经完成了JMX脚本的分析,大致了解了JMX脚本的基本元素。 那么在这一集,我们将会介绍一下Jmeter二次开发的Demo。 Demo代码 那么话不多说,我们就直接上代码。 public class TestStress…...
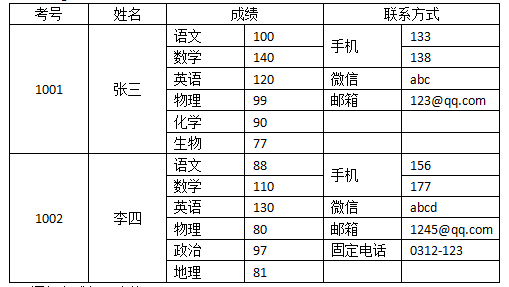
MongoDB综合实战篇(超容易)
一、题目引入 在MongoDB的gk集合里插入以下数据: 用语句完成如下功能: (1)查询张三同学的成绩信息 (2)查询李四同学的语文成绩 (3)查询没有选化学的同学 (4…...

框架设计MVVM
重点: 1.viewmodel 包含model 2.view包含viewmodel,通过驱动viewmodel去控制model的数据和业务逻辑 // Test.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。 //#include <iostream> #include <vector>using namespace std;#p…...

RK3399基础部分
1.RK3399介绍 基础特性: 高达1.8GHz的双核Cortex-A72 四核Cortex-A53高达1.4GHz NPU高达3.0TOPS Mali-T860MP4 GPU 双通道DDR3/DDR3L/LPDDR3/LPDDR4 4K超高清H265/H264/VP9 HDR10/HLG H264编码器 双MIPI CSI和ISP USB Type-CGPU: 图形处理器(英语&…...
)
linux高级编程(广播与组播)
广播与组播: 广播: 局域网,一个人发所有人都能收(服务器找客户端),(发给路由器的广播地址后后路由器自动给所有人发,可用于服务器找客户端) 只能udp来做 setsocketopt…...

Andriod Stdio新建Kotlin的Jetpack Compose简单项目
1.选择 No Activity 2.选择kotlin 4.右键选择 在目录MyApplication下 New->Compose->Empty Project 出现下面的画面 Finish 完成...

Linux多线程编程-哲学家就餐问题详解与实现(C语言)
在哲学家就餐问题中,假设有五位哲学家围坐在圆桌前,每位哲学家需要进行思考和进餐两种活动。他们的思考不需要任何资源,但进餐需要使用两根筷子(左右两侧各一根)。筷子是共享资源,哲学家们在进行进餐时需要…...

从C向C++18——演讲比赛流程管理系统
一.项目需求 1.比赛规则 学校举行一场演讲比赛,共有12个人参加。比赛共两轮,第一轮为淘汰赛,第二轮为决赛。每名选手都有对应的编号,如 10001~ 10012比赛方式:分组比赛,每组6个人;第一轮分为两…...

QThread和std::thread
在 Qt 中, 我们经常会用到多线程,这时候就需要纠结是使用 Qt 的 QThread 还是使用 C 标准库的 std::thread。 这里记录一下我自己的理解,先介绍一下 QThread 和 std::thread 的使用方法,对比一下他们的不同,最后说一下…...

LeetCode 算法:组合总和 c++
原题链接🔗:组合总和 难度:中等⭐️⭐️ 题目 给你一个 无重复元素 的整数数组 candidates 和一个目标整数 target ,找出 candidates 中可以使数字和为目标数 target 的 所有 不同组合 ,并以列表形式返回。你可以按 …...

benchmark-ips源码剖析:理解Ruby性能测试的内部机制
benchmark-ips源码剖析:理解Ruby性能测试的内部机制 【免费下载链接】benchmark-ips Provides iteration per second benchmarking for Ruby 项目地址: https://gitcode.com/gh_mirrors/be/benchmark-ips 什么是benchmark-ips? benchmark-ips是一…...

static-php-cli与Swoole集成:构建高性能微服务应用的最佳实践
static-php-cli与Swoole集成:构建高性能微服务应用的最佳实践 【免费下载链接】static-php-cli Build standalone portable PHP binaries on Linux, macOS, Windows, with PHP project together, with popular extensions included. 项目地址: https://gitcode.co…...

从能算到秒杀:完全平方数与最少数量的数学真相
LeetCode Hot 100 刷题笔记 第 15 篇如果说「跳跃游戏 II」是在教你 什么时候不得不跳,那 279. 完全平方数 就是在考你:最少能用几个平方数,凑出一个整数?这也是我第一次意识到:有些动态规划,其实是在替…...

毫米波高汇聚空馈天线技术【附方案】
✨ 长期致力于透射阵天线、高增益、宽角波束扫描、共形设计、近场赋形研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)低剖面透射阵天线设计ÿ…...

涡流检测驱动的发动机气门硬度分选技术【附算法】
✨ 长期致力于核环境机器人、机器人运动学、机械臂振动抑制、自适应动力学控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)核辐射环境下涡流检测机…...

基于STM32的温室大棚智能监控与无线调控系统设计
摘要:本设计了一种基于STM32的温室大棚智能监控系统。系统采用STM32F103作为主控芯片,集成DHT11温湿度传感器、土壤湿度传感器和C O2传感器实现环境参数采集。通过ESP32-C3 WiFi模块实现数据无线传输和远程控制,OLED屏幕进行本地显示。项目简…...

《CVPR2025-DEIM创新改进项目实战:从原理到部署的深度学习优化全攻略》018、DeepLab-DEIM与SegFormer-DEIM语义分割优化全记录
CVPR2025-DEIM创新改进项目实战:DeepLab-DEIM与SegFormer-DEIM语义分割优化全记录 一、从一次令人崩溃的显存溢出说起 上周三凌晨两点,我盯着屏幕上那个“CUDA out of memory”的红色报错,差点把咖啡泼到键盘上。当时正在跑一个DeepLabV3+的语义分割实验,输入尺寸不过是1…...

如何彻底解决游戏键盘冲突:Hitboxer SOCD Cleaner完整指南
如何彻底解决游戏键盘冲突:Hitboxer SOCD Cleaner完整指南 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 你是否在激烈的游戏对战中遇到过这样的困扰?同时按下W和S键时角色突然卡顿&…...

工厂实验室建设公司厂家:建不好,产品质量白搞|中南实验室建设
在工业4.0浪潮席卷全球的今天,工厂实验室早已不是传统意义上"摆几台仪器、刷几面墙"的简单工程。它是企业质量管控的第一道闸门,是工艺优化的数据引擎,更是技术创新的核心载体。从新能源电池的毫秒级安全测试,到半导体工…...

宣传片微电影制作拍摄
荣誉见证实力・匠心铸就品牌|国隆映像传媒,6 年深耕乌鲁木齐,斩获全国影像盛典、脱贫攻坚、文旅代言等多项大奖,为企事业单位提供一站式影视制作服务。...