【笔记:3D航路规划算法】一、随机搜索锚点(python实现,讲解思路)
目录
- 关键概念
- 3D路径规划算法
- 1. A*算法
- 2. 快速随机锚点
- 1. 初始化:
- 2. 实例化搜索算法:
- 3. 路径生成:
- 4. 绘制图像:
3D路径规划是在三维空间中寻找从起点到终点的最短或最优路径的一种技术。它广泛应用于无人机导航、机器人运动规划、虚拟现实等领域
关键概念
-
节点和网格:
- 在3D路径规划中,节点表示三维空间中的位置,通常用(x, y, z)坐标表示。
- 网格是将三维空间离散化的方式,可以是规则的立方体网格或其他形式的分区。
-
代价函数:
- 代价函数用于评估从一个节点移动到另一个节点的代价,通常包括距离和可能的障碍物影响。
- 常见的距离度量包括欧几里得距离、曼哈顿距离等。
-
启发式函数:
- 启发式函数用于估计当前节点到目标节点的代价,在A*算法中非常重要。
- 例如,三维欧几里得距离可以用作启发式函数。
-
障碍物:
- 障碍物表示在三维空间中不可通过的区域。
- 在路径规划中需要检测和避开这些区域。
3D路径规划算法
1. A*算法
A算法是最常用的路径规划算法之一,它结合了启发式搜索和实际代价来找到最优路径。以下是A算法在3D空间中的步骤:
-
初始化:
- 创建起点节点和终点节点。
- 将起点节点添加到开放集合(open set)中。
-
搜索过程:
- 从开放集合中取出代价最小的节点。
- 生成当前节点的所有邻居节点。
- 对每个邻居节点进行评估,如果节点在障碍物中,跳过该节点。
- 如果邻居节点是终点节点,记录路径并结束搜索。
- 否则,计算邻居节点的代价,并将其添加到开放集合中。
-
路径构建:
- 从终点节点开始回溯到起点节点,构建最终路径。
2. 快速随机锚点
随机锚点是一种适用于高维空间的路径规划算法,通过随机采样和锚点的扩展找到路径。
1. 初始化:
创建一个搜索空间
space_size = np.array([(0, 1000), (0, 1000), (0, 1000)]) # 搜索空间的维度
Z = search_tree(space_size)
生成若干障碍物,这里均为长方体,简单一点可以构建2个顶点就可以制作好障碍物
还需要输入起始位置和目标位置,不能让这两点在障碍物中
n = 100 # n个障碍物
z_start = (0, 0, 0) # 起始位置
z_end = (1000, 1000, 1000) # 目标位置
Cuboid = generate_random_cuboid(Z, z_start, z_end, n)
2. 实例化搜索算法:
q = 50 # 在路径规划过程中,每次扩展时,新的节点之间的最大距离。这个距离越大,扩展速度越快,但可能会导致不够精细的路径
r = 1 # 检测新生成的路径是否与障碍物相交的最小边长度。如果新生成的边长度小于 r,则需要检查该边是否与障碍物相交
max_explore = 512 # 在路径规划过程中最多允许采样的次数。如果达到这个次数还没有找到有效路径,则算法会超时
p = 0.5 # 检查连接到目标的概率。在每次扩展时,有一定的概率直接尝试将新节点连接到目标位置。这个概率值越大,算法越倾向于直接尝试连接到目标,而不是继续随机扩展。
xxx = XXX(Z, q, z_start, z_end, max_explore, r, p)
3. 路径生成:
- 将起点添加到空间中
- 开始循环
- 随机生成一个锚点
- 找到随机锚点距离最近的空间节点(一开始就是起点)
- 找到随机锚点和空间节点,距离为空间节点q的一个点
- 检查锚点是否在长方体内,如果不在则返回
- 判断锚点和空间节点的边是否在障碍物内,若不在,则相连
- 根据检测概率p检查当前新锚点是否可以连接到目标,如果可以则视为成功推出循环
- 从终点反推起点生成路径
4. 绘制图像:

可旋转探索效果展示
相关文章:
【笔记:3D航路规划算法】一、随机搜索锚点(python实现,讲解思路)
目录 关键概念3D路径规划算法1. A*算法2. 快速随机锚点1. 初始化:2. 实例化搜索算法:3. 路径生成:4. 绘制图像: 3D路径规划是在三维空间中寻找从起点到终点的最短或最优路径的一种技术。它广泛应用于无人机导航、机器人运动规划、…...

ubuntu如何彻底卸载android studio?
最新版的ubuntu已经使用snap进行软件管理了,我用snap-store安装android studio以后,在安装plugin的时候强制退出后,直接再也进不去了,启动就报错。 先后进行了如下操作依然不行: 1 重装snap-store和android studio都…...
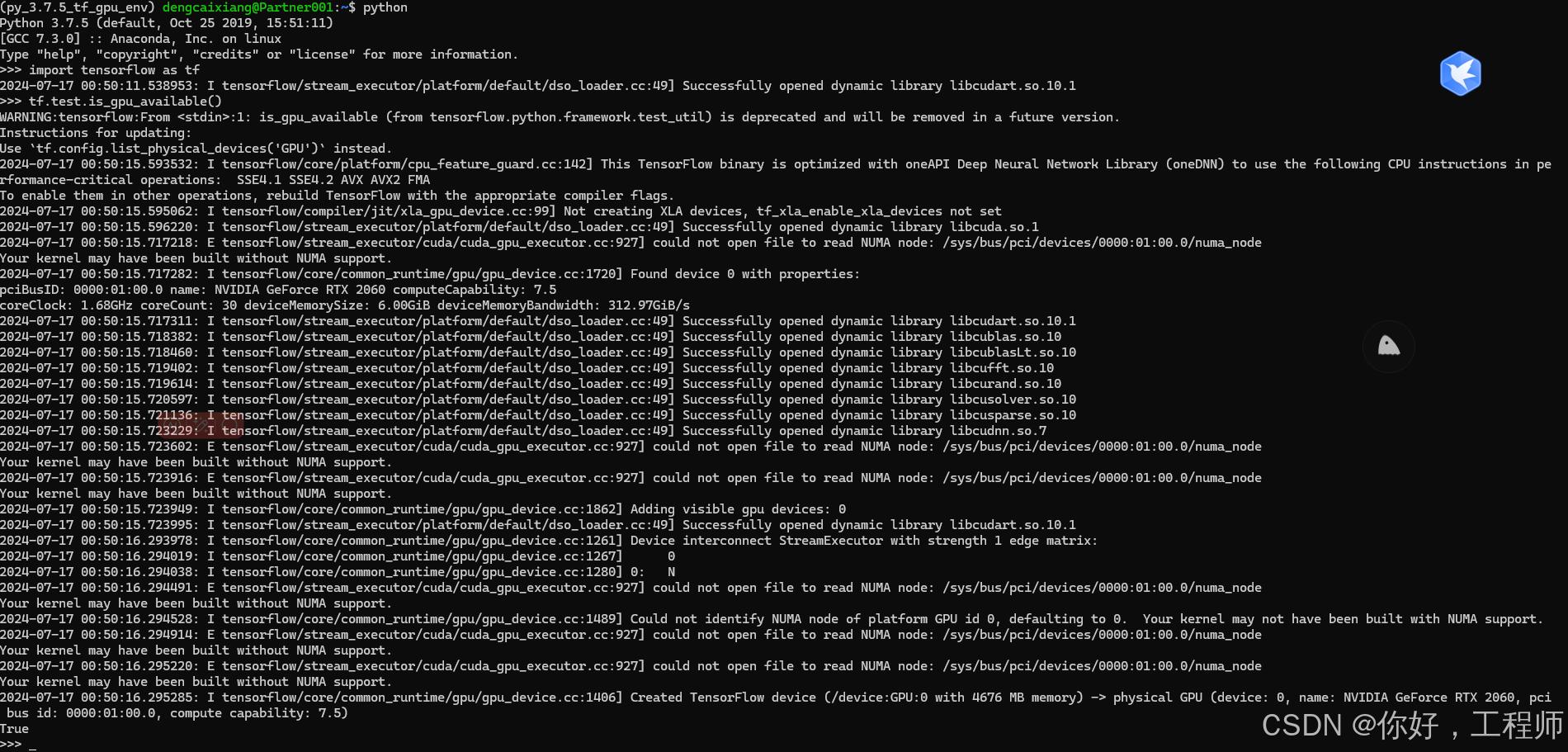
使用Windows Linux 子系统安装 Tensorflow,并使用GPU环境
在Microsoft Store商店安装Ubuntu 20.04 使用 nvidia-smi 命令查看GPU信息,查看支持的CUDA版本,这里最高支持11.7 安装cuda工具集 进入官网:CUDA Toolkit Archive | NVIDIA Developer,现在对应版本,点击 配置平台&…...

C++案例三:猜数字游戏
文章目录 介绍代码说明设置随机种子生成随机数猜测循环完整代码运行效果介绍 猜数字游戏是一个经典的编程练习,通过这个案例可以学习到基本的输入输出、随机数生成、条件判断和循环结构。 代码说明 设置随机种子 std::srand(static_cast<unsigned int>(std::time(nu…...

LNMP架构部署及应用
部署LNMP架构流程 1.安装Nginx(上传软件包,执行脚本) yum -y install pcre-devel zlib-devel gcc gcc useradd -M -s /sbin/nologin nginx tar zxf nginx-1.12.0.tar.gz cd nginx-1.12.0 ./configure --prefix/usr/local/nginx --usernginx…...

【医学影像】X86+FPGA:支持AI医学影像设备应用的工控主板,赋能CT、MRI、X线、超声等医学影像设备
支持AI医学影像设备应用的工控主板 在我国人口老龄化问题不断加剧,对影像诊断需求持续增长,和国家利好高端医学影像市场发展的系列法规和政策接连出台的大环境下,AI医学影像设备产业迎来发展黄金期。紧跟发展大势,基于12/13代 In…...

【PostgreSQL】PostgreSQL简史
博主介绍:✌全网粉丝20W,CSDN博客专家、Java领域优质创作者,掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域✌ 技术范围:SpringBoot、SpringCloud、Vue、SSM、HTML、Nodejs、Python、MySQL、PostgreSQL、大数据、物…...

Linux的热插拔UDEV机制和守护进程
目录 一、Linux的热插拔UDEV机制 二、守护进程 2.1 守护进程概念和基本特点: 2.2 显示进程信息: 2.3 守护进程和后台进程的区别: 2.4 创建守护进程的步骤和守护进程的特征: 2.4.1 创建守护进程的步骤: 2.4.2 守…...

laravel框架基础通识-新手
常用目录及其解析 routes 该目录为路由目录 一般根据api uri可以反向查找对应路由及其controller,目录下的文件名一般和url的第一级对应为了规范,然后根据根据里面具体分组和别名对应拼接对应路由url,后面对应的则是controller,…...

c++ extern 关键字
C中的extern关键字和跨语言互操作 变量的声明与定义 extern关键字用于声明在另一个翻译单元(文件)中定义的变量或函数。通过extern关键字,可以在多个文件中访问全局变量或函数。 变量声明示例 文件:main.cpp #include <io…...
)
Meta KDD Cup 2024 CRAG: Comphrehensive RAG Benchmark参赛指南(写了一半跑去改大论文了所以没正式参赛)
诸神缄默不语-个人CSDN博文目录 因为比赛过程正好和我毕业答辩的时间段高度重合,所以我……最后其实还是相当于没有成功参赛。 呃反正现在已经咕咕咕了,就把当时写了一半(一小半)的参赛指南发一下吧。 官网:AIcrowd …...

系统架构设计师教程 第3章 信息系统基础知识-3.7 企业资源规划(ERP)-解读
系统架构设计师教程 第3章 信息系统基础知识-3.7 企业资源规划(ERP) 3.7.1 企业资源规划的概念3.7.2 企业资源规划的结构3.7.2.1 生产预测3.7.2.2 销售管理(计划)3.7.2.3 经营计划(生产计划大纲)3.7.2.4 …...
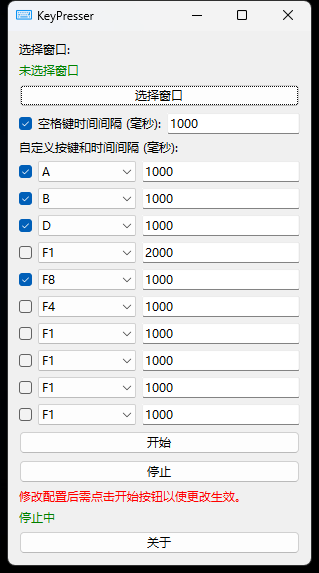
windows实现自动化按键
1.选择目标窗口 获取窗口句柄 void KeyPresser::selectWindow() {SetWinEventHook(EVENT_SYSTEM_FOREGROUND, EVENT_SYSTEM_FOREGROUND, NULL, WinEventProc, 0, 0, WINEVENT_OUTOFCONTEXT);selectedWindowLabel->setText("请点击目标窗口..."); }void CALLBACK …...

阿里云 https证书部署
一.申请证书 二.查看状态 查看状态,已签发是完成了申请证书 三.部署 我在nginx服务器上部署 具体操作链接:阿里云文档 修改前 修改后 四.重启ngnix 五.验证是否成功 在浏览器输入域名查看...

DX-10A信号继电器 柜内安装,板前接线 约瑟JOSEF
DX-10型闪光信号继电器型号: DX-10A闪光信号继电器; DX-10B闪光信号继电器; DX-10C闪光信号继电器; 用途 DX-10 闪光继电器用于电力系统断路器的位置信号灯不对应闪光,该继电器是为了适应当前推广使用发光二极管节能指示灯而…...

芯片光刻后的晶片多层组合构成的吗
是的,芯片(尤其是集成电路芯片)确实是通过光刻后的晶片多层组合构成的。在芯片制造过程中,光刻是一个至关重要的步骤,用于在硅片(或称为晶片)上刻画出精确的电路图案。然而,一个完整…...

OpenGL-ES 学习(7) ---- VBO EBO 和 VAO
目录 VBO(Vertex Buffer Object)EBO(Element Buffer Object)VAO(Vertex Array Object) VBO(Vertex Buffer Object) EBO(Element Buffer Object) VBO(Vertex Buffer Object) 实际是指顶点缓冲器对象 在 opengl-es 2.0 的编程中,用于绘制图元的顶点数据是从 CPU 传…...

github如何实现和gitlab的同步
要实现 GitHub 和 GitLab 之间的同步,你可以使用以下几种方法。这里介绍两种常用的方法:使用 GitLab CI/CD 和使用镜像仓库。 方法1:使用 GitLab CI/CD 通过 GitLab CI/CD,可以在每次推送到 GitLab 时自动同步到 GitHub。以下是…...

内网隧道——隧道技术基础
文章目录 一、正向连接与反向连接1.1 正向连接1.2 反向连接 二、端口转发三、端口映射四、端口复用五、代理和隧道的区别六、常见隧道穿透分类 环境: kali:192.168.92.6,MSF v6.3.25 win7:192.168.92.7 一、正向连接与反向连接 1…...

NAS新品“翻车”后,绿联科技要上市了
在消费电子市场回暖的东风中,又一消费电子知名企业登陆A股。 近日,深圳市绿联科技股份有限公司(下称“绿联科技”)开启申购,将在创业板上市。本次上市,绿联科技的发行价为21.21元/股,发行数量为…...

Beyond Compare 5完全激活指南:3种简单方法告别30天试用限制
Beyond Compare 5完全激活指南:3种简单方法告别30天试用限制 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen 你是否正在使用Beyond Compare 5这款强大的文件对比工具,却因…...

基于ChatGPT与Next.js的React组件自然语言生成器开发实战
1. 项目概述:一个由ChatGPT驱动的React组件实时生成器 作为一名在React生态里摸爬滚打了多年的前端开发者,我深知从零开始构建一个UI组件,尤其是那些需要反复调整样式和交互逻辑的组件,是多么耗时耗力。我们常常在Figma里画好了设…...

基于Azure SQL与Semantic Kernel的RAG应用实战:低成本实现向量搜索与智能问答
1. 项目概述:当SQL数据库遇上向量搜索如果你正在用.NET技术栈构建智能应用,并且数据已经躺在Azure SQL Database里,那么“如何低成本、高效率地实现语义搜索和RAG(检索增强生成)”很可能就是你当前最头疼的问题。传统的…...

Power Automate调用Azure Foundry智能体
Power Automate调用Azure Foundry智能体一、创建Foundry智能体二、发送HTTP请求,调用Foundry智能体三、拓展一、创建Foundry智能体 先从创建开始吧 填好,然后直接审阅并创建就行了。一个资源下可以创建多个项目 转到资源 转到门户 这里有API密钥&…...

OpenClaw-Readwise:开源高亮同步工具的设计与实现
1. 项目概述:一个连接知识碎片的“机械爪” 如果你和我一样,是个重度阅读爱好者,并且习惯把在各种地方(比如Kindle、网页文章、PDF文档)看到的好句子、有启发的段落,用高亮(Highlightÿ…...

Bevy引擎拾取系统:从射线检测到事件冒泡的完整交互方案
1. 项目概述与核心价值在构建交互式应用,尤其是游戏或3D编辑器时,一个基础且高频的需求就是让用户能够用鼠标、触摸屏等指针设备与屏幕上的物体进行交互。简单来说,就是“点选”功能。在Bevy引擎的早期版本中,这个看似简单的功能实…...

superpowers skill 3.1: using-git-worktrees
智能体工作流 安装 $ npx skills add https://github.com/obra/superpowers --skill using-git-worktrees摘要 具有智能目录选择和安全验证的隔离 Git 工作树。 通过检查现有目录、CLAUDE.md 偏好设置或询问用户来自动检测工作树目录位置;支持项目本地ÿ…...

AGHub:统一管理AI编码助手配置与技能,打造高效开发工作流
1. 项目概述:为什么我们需要一个AI编码代理的“集线器”? 最近一年,我几乎把所有主流的AI编码助手都试了个遍:Cursor、Windsurf、Claude Code、Gemini CLI,还有各种基于OpenCode的本地模型。它们各有千秋,…...

浏览器缓存揭秘:它什么时候“自动”生效?
🚀 浏览器缓存揭秘:它什么时候“自动”生效? 🤔 什么是浏览器缓存? 简单来说,浏览器缓存就是浏览器把下载过的资源(HTML, CSS, JS, 图片等)保存在本地硬盘或内存中。当再次请求相同…...

使用Taotoken后模型API调用的延迟与稳定性观测体验分享
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Taotoken后模型API调用的延迟与稳定性观测体验分享 作为一名日常需要与多种大模型API打交道的开发者,模型服务的稳…...