深入浅出WebRTC—ALR
ALR(Application Limited Region)指的是网络传输过程中,由于应用层的限制(而非网络拥塞)导致带宽未被充分利用的情况。在这种情况下,应用层可能因为处理能力、手动配置或其他因素无法充分利用可用带宽,导致实际传输速率低于网络最大可能提供的速率。因此,在进行拥塞控制或带宽估算时,识别和处理 ALR 状态对于避免不必要的码率下调或误判网络状况至关重要。
1. 配置
ALR逻辑比较简单,配置项就3个,主要用来协助定义进入和退出ALR状态的规则。
struct AlrDetectorConfig {// ALR使用的带宽是估计带宽乘以一个比例系数double bandwidth_usage_ratio = 0.65;// 带宽使用从高点下降,且剩余可用带宽占总容量的比例达到或超过此值时,视为开始进入ALR状态。double start_budget_level_ratio = 0.80;// 当带宽使用回升,且实际使用比例再次超过此值时,认为已从ALR状态中恢复出来。double stop_budget_level_ratio = 0.50;std::unique_ptr<StructParametersParser> Parser();
};2. 静态结构
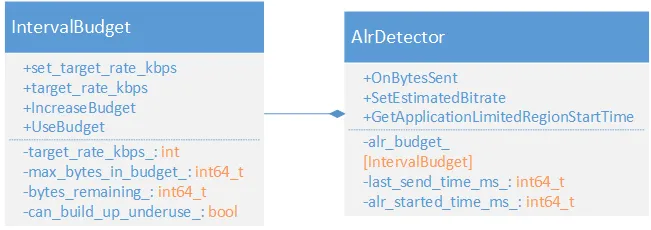
ALR实现只有两个类,AlrDetector提供接口,其内部使用IntervalBudget来更新ALR状态,对外接口只有三个:
1)OnBytesSent:每发送完一个报文需要调用此接口,此接口完成Budget水位的更新。
2)SetEstimatedBitrate:设置估计带宽,估计带宽会影响Budget水位调整的细节。
3)GetApplicationLimitedRegionStartTime:如果有值,表示进入ALR状态,否则表示退出ALR状态。这里为什么不用一个bool值来表示是否处于ALR状态,是因为某些逻辑需要知道是什么时候进入ALR状态和什么时候退出ALR状态的。
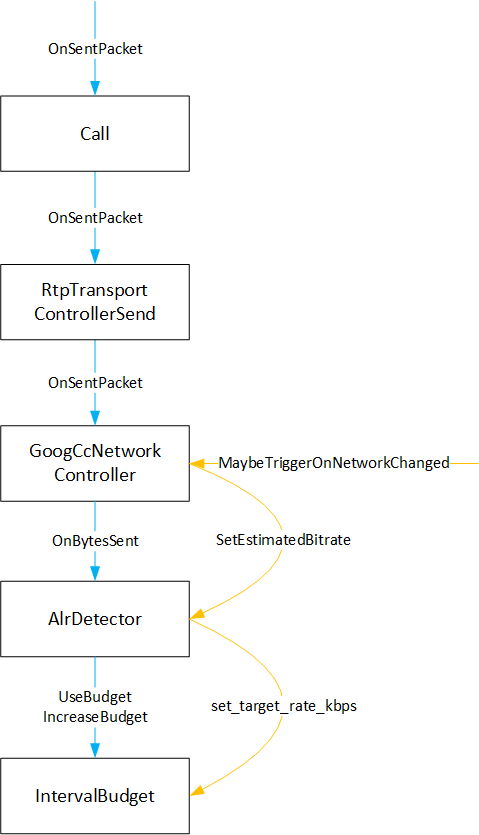
3. 调用流程
ALR处理逻辑主要涉及两个调用链,一个是发送报文后,调用AlrDetector::OnBytesSent更新Budget水位,通过Budget水位才能判断当前ALR状态;另一个是带宽评估变化调用AlrDetector::SetEstimatedBitrate设置估计带宽,估计带宽会影响水位更新细节和ALR状态判断规则。
4. 实现
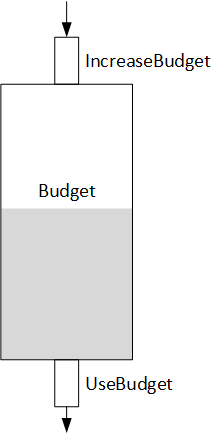
4.1. Bucket模型
为了便于理解WebRTC是如何判断ALR状态,引入一个Bucket模型。Bucket中的水位表示当前Budget,可以认为是账户余额,IncreateBudget会向账户中存入资金,增加账户余额,从而提高Bucket中的水位;UseBudget会从账户中支取资金,减少账户余额,从而降低Bucket中的水位。
IntervalBudget是Bucket模型的实现者,只是Budget从金钱换成了数据,每过一段时间 t 计算应该发送的数据:估计带宽 * t,这些数据会存入Budget,每次发送完报文,需要消耗报文对应数据量的Budget。
相关逻辑代码如下:
void AlrDetector::OnBytesSent(size_t bytes_sent, int64_t send_time_ms) {...int64_t delta_time_ms = send_time_ms - *last_send_time_ms_;last_send_time_ms_ = send_time_ms;// 减少Budgetalr_budget_.UseBudget(bytes_sent);// 增加Budgetalr_budget_.IncreaseBudget(delta_time_ms);...
}通过定义桶的高度,并在桶上面画上80%和50%两个刻度,bytes_remaining_为当前Budget水位,从而形成了一个完整的Bucket模型,如下图所示,图中变量与代码中变量一一对应。
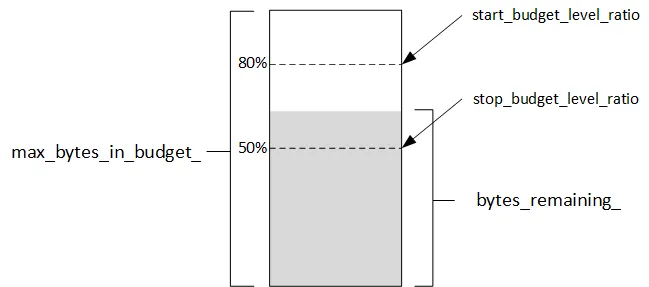
其中桶高度max_bytes_in_budget_定义如下:
void IntervalBudget::set_target_rate_kbps(int target_rate_kbps) {// 更新目标速率target_rate_kbps_ = target_rate_kbps;// 计算时间窗口内最多可以发送多少数据,kWindowMs = 500max_bytes_in_budget_ = (kWindowMs * target_rate_kbps_) / 8;...
}4.2. 估计带宽
从上面的Bucket模型可知,估计带宽会影响到桶的高度和Budget流入的速度。外部会向AlrDectector实时更新估计带宽,但AlrDetector不会全部使用,而是乘以一个系数0.65(这看起来像是一个经验值)再设置到IntervalBudget。
void AlrDetector::SetEstimatedBitrate(int bitrate_bps) {RTC_DCHECK(bitrate_bps);int target_rate_kbps =static_cast<double>(bitrate_bps) * conf_.bandwidth_usage_ratio / 1000;alr_budget_.set_target_rate_kbps(target_rate_kbps);
}4.3. 水位变化
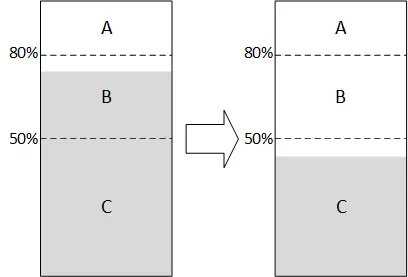
Bucket中的水位用bytes_remaining_表示,80%和50%两条水位线将桶的水位位置划分为三个区:A、B、C,则水位的变化可以穷举为:A -> B、A -> C、B -> A、B -> C、C -> A、C -> B六种情况。
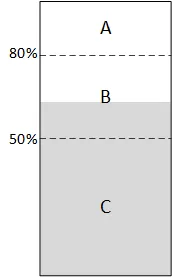
WebRTC实现定义如果水位处于A区,则一定是“进入ALR”状态,因为实际发送数据远少于应该发送数据;如果水位处于C区,则一定是“退出ALR”状态,因为实际发送数据已经大于应该发送数据。B区是一个过渡区,它的ALR状态和上一个水位相关,下面我们看下水位在A、B和C三个区中动态变化中,ALR状态的变化。
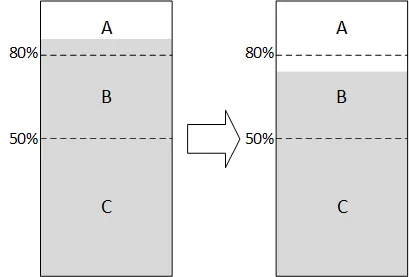
4.3.1. A -> B
刚开始处于“进入ALR”状态,bytes_remaining_比例从高于80%,下降到低于80%但高于50%,ALR状态保持不变。
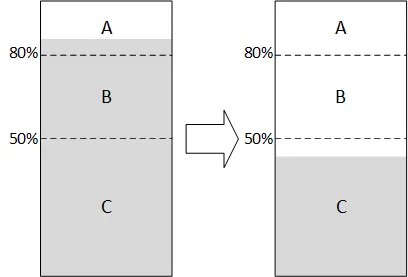
4.3.2. A -> C
刚开始处于“进入ALR”状态,bytes_remaining_比例从高于80%,下降到低于50%,变为“退出ALR”状态。
4.3.3. B -> A
刚开始可能处于“进入ALR”状态也可能处于“退出ALR”状态,bytes_remaining_从低于80%但高于50%变为高于80%。
1)如果刚开始处于“进入ALR”状态(从A区进入B区),则状态保持不变,仍为“进入ALR”状态;
2)如果刚开始处于“退出ALR”状态(从C区进入B区),则变为“进入ALR”状态。
总之,不管之前是什么状态,进入A区后肯定是“进入ALR”状态。
4.3.4. B -> C
刚开始可能处于“进入ALR”状态也可能处于“退出ALR”状态,bytes_remaining_从低于80%但高于50%变为低于50%。
1)如果刚开始处于“进入ALR”状态(从A区进入B区),则状态变为“退出ALR”状态;
2)如果刚开始处于“退出ALR”状态(从C区进入B区),则状态保持不变,仍为“退出ALR”状态。
总之,不管之前是什么状态,进入C区后肯定是“退出ALR”状态。
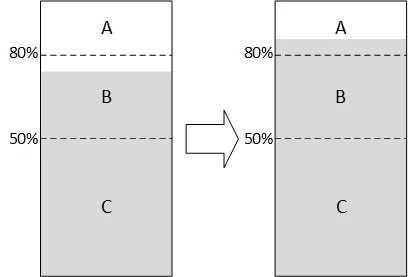
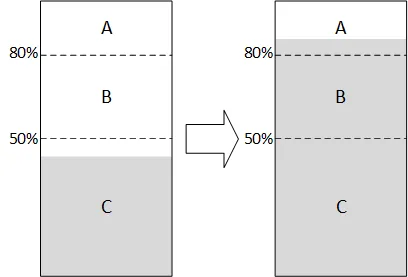
4.3.5. C -> A
刚开始处于“退出ALR”状态,bytes_remaining_从低于50%变为高于80%,变为“进入ALR”状态。
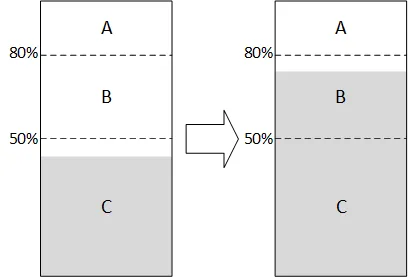
4.3.6. C -> B
刚开始处于“退出ALR”状态,bytes_remaining_从低于50%变为高于50%但低于80%,状态保持不变。
4.4. 状态机
以上ALR状态跟随水位变化可以用状态机表示如下:
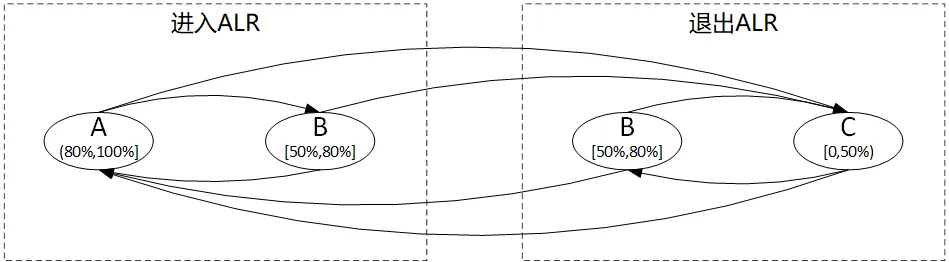
对应源码为:
void AlrDetector::OnBytesSent(size_t bytes_sent, int64_t send_time_ms) {...if (alr_budget_.budget_ratio() > conf_.start_budget_level_ratio && !alr_started_time_ms_) {// 进入ALRalr_started_time_ms_.emplace(rtc::TimeMillis());state_changed = true;} else if (alr_budget_.budget_ratio() < conf_.stop_budget_level_ratio &&alr_started_time_ms_) {// 退出ALRstate_changed = true;alr_started_time_ms_.reset();}...
}5. ALR应用
5.1. ProbeController
进入ALR状态后,真实发送的码率可能会远低于链路真实容量,如果长时间处于ALR状态而不进行带宽探测,持续的ACK反馈码率会影响最终估计码率,从而导致无法估计带宽失真。因此,专门设置了一个ALR带宽探测机制,进入ALR状态后,ProbeController会立即启动一个ALR带宽探测。
1)GoogCcNetworkController在OnProcessInterval中更新ALR开始时间
NetworkControlUpdate GoogCcNetworkController::OnProcessInterval(ProcessInterval msg) {...// 获取ALR状态absl::optional<int64_t> start_time_ms =alr_detector_->GetApplicationLimitedRegionStartTime();// 设置ALR状态probe_controller_->SetAlrStartTimeMs(start_time_ms);...
}2)在OnTransportPacketsFeedback中更新ALR结束时间
NetworkControlUpdate GoogCcNetworkController::OnTransportPacketsFeedback(TransportPacketsFeedback report) {...// 获取ALR状态absl::optional<int64_t> alr_start_time =alr_detector_->GetApplicationLimitedRegionStartTime();// 退出ALR状态if (previously_in_alr_ && !alr_start_time.has_value()) {int64_t now_ms = report.feedback_time.ms();acknowledged_bitrate_estimator_->SetAlrEndedTime(report.feedback_time);probe_controller_->SetAlrEndedTimeMs(now_ms);}...
}3)ProbeController会定时检测ALR状态,适时启动ALR带宽探测,探测码率是当前评估码率的2倍,带宽探测结果在带宽探测机制中获得。
std::vector<ProbeClusterConfig> ProbeController::Process(Timestamp at_time) {...// 以两倍估算带宽进行探测:alr_probe_scale("alr_scale", 2)if (TimeForAlrProbe(at_time) || TimeForNetworkStateProbe(at_time)) {return InitiateProbing(at_time, {estimated_bitrate_ * config_.alr_probe_scale}, true);}...
}5.2. AcknowledgedBitrateEstimator
ACK码率估计器使用贝叶斯估计算法,其中很重要的一个参数就是数据样本的不确定性,应用如果进入ALR状态,则说明此时真实发送的码率低于链路容量,当前ACK样本不能真实反映链路带宽,则应该适当增加当前数据样本的不确定性,使得带宽评估值更加真实可靠。
1)GoogCcNetworkController在OnSentPacket中设置ALR状态
NetworkControlUpdate GoogCcNetworkController::OnSentPacket(SentPacket sent_packet) {alr_detector_->OnBytesSent(sent_packet.size.bytes(), sent_packet.send_time.ms());acknowledged_bitrate_estimator_->SetAlr(alr_detector_->GetApplicationLimitedRegionStartTime().has_value());...
}2)在OnTransportPacketsFeedback中更新ALR结束时间
NetworkControlUpdate GoogCcNetworkController::OnTransportPacketsFeedback(TransportPacketsFeedback report) {...// 获取ALR状态absl::optional<int64_t> alr_start_time =alr_detector_->GetApplicationLimitedRegionStartTime();// 退出ALR状态if (previously_in_alr_ && !alr_start_time.has_value()) {int64_t now_ms = report.feedback_time.ms();acknowledged_bitrate_estimator_->SetAlrEndedTime(report.feedback_time);probe_controller_->SetAlrEndedTimeMs(now_ms);}...
}3)ALR刚结束,码率增速会比正常快,增加贝叶斯估计器历史数据的方差,也就是历史数据的贡献变小,能够更快速响应码率变化。
void AcknowledgedBitrateEstimator::IncomingPacketFeedbackVector(const std::vector<PacketResult>& packet_feedback_vector) {...for (const auto& packet : packet_feedback_vector) {// ALR刚结束,设置码率估计器快速响应新的码率if (alr_ended_time_ && packet.sent_packet.send_time > *alr_ended_time_) {bitrate_estimator_->ExpectFastRateChange();alr_ended_time_.reset();}...}
}4)贝叶斯估计器在更新数据时,如果当前正处于ALR状态,会为数据样本赋予一个更大的不确定性,使得其在整体数据中的贡献占比降低。
void BitrateEstimator::Update(Timestamp at_time, DataSize amount, bool in_alr) {...float scale = uncertainty_scale_;if (is_small_sample && bitrate_sample_kbps < bitrate_estimate_kbps_) {scale = small_sample_uncertainty_scale_;} else if (in_alr && bitrate_sample_kbps < bitrate_estimate_kbps_) {// Optionally use higher uncertainty for samples obtained during ALR.scale = uncertainty_scale_in_alr_;}...
}5.3. DelayBasedBWE
由于在 ALR 状态下获取的反馈不是链路满载下的反馈,基于这种反馈向上调整带宽估计值很可能是不准确的,因此,ALR 状态保持原来的估计值,是比较明智的。
void AimdRateControl::ChangeBitrate(const RateControlInput& input, Timestamp at_time) {absl::optional<DataRate> new_bitrate;...switch (rate_control_state_) {case RateControlState::kRcHold:break;case RateControlState::kRcIncrease: {// ALR状态不允许升速if (send_side_ && in_alr_ && no_bitrate_increase_in_alr_) {increase_limit = current_bitrate_;}...}...
}5.4. LossBasedBweV2
基于丢包的带宽估计器,在全局搜索最优带宽和固有丢包率组合时,需要先构造候选带宽。如果当前正处于 ALR 状态,ACK 码率不能反映网络真实带宽,不应该将 ACK 码率作为候选带宽(可配置)。
std::vector<LossBasedBweV2::ChannelParameters> LossBasedBweV2::GetCandidates(bool in_alr) const {...// 添加一个基于 ACK 码率但进行了回退因子调整的候选带宽if (acknowledged_bitrate_.has_value() &&config_->append_acknowledged_rate_candidate) {if (!(config_->not_use_acked_rate_in_alr && in_alr) ||(config_->padding_duration > TimeDelta::Zero() &&last_padding_info_.padding_timestamp + config_->padding_duration >=last_send_time_most_recent_observation_)) {bandwidths.push_back(*acknowledged_bitrate_ *config_->bandwidth_backoff_lower_bound_factor);}}...
}6. 总结
识别 ALR 状态对 WebRTC 的拥塞控制来说非常重要,很多人可能没有意识到这一点。为什么这么说,是因为,WebRTC 的拥塞控制算法本质上是一种“刀尖上跳舞”的算法,只有当你要求的最大带宽超过链路容量时,才需要做拥塞控制,此时 WebRTC 会在链路容量的上限疯狂试探。如果带宽随便你使用,怎么用都用不完,怎么用都不会造成拥塞,那也就没必要做拥塞控制了。
ALR 状态本质上是用来标识当前带宽是否够用,进入 ALR 状态和退出 ALR 状态,所需要的控制策略是不一样的,相关算法都需要做调整。ALR 状态就像一个全局开关,开和关直接控制着拥塞控制的行为。
相关文章:
深入浅出WebRTC—ALR
ALR(Application Limited Region)指的是网络传输过程中,由于应用层的限制(而非网络拥塞)导致带宽未被充分利用的情况。在这种情况下,应用层可能因为处理能力、手动配置或其他因素无法充分利用可用带宽&…...

BSV区块链技术现实应用原理解析
BSV区块链以其卓越的可扩展性、坚如磐石的安全性、极低的交易成本等特性,成为满足企业当下需求并为企业未来成功奠基铺路的理想技术。 BSV协会近期发布了一个题为《驾驭数字化转型:在自动化世界中建立信任——区块链在数据保护和交易优化中的角色》的报…...

七大基于比较的排序算法
目录 一、基于比较的排序算法概述 1. 插入排序(Insertion Sort) 2. 选择排序(Selection Sort) 3. 冒泡排序(Bubble Sort) 4. 归并排序(Merge Sort) 5. 快速排序(Qu…...
)
web前端 React 框架面试200题(四)
面试题 97. React 两种路由模式的区别?hash和history? 参考回答: 1: hash路由 hash模式是通过改变锚点(#)来更新页面URL,并不会触发页面重新加载,我们可以通过window.onhashchange监听到hash的改变,从而处…...
5.Fabric的共识机制
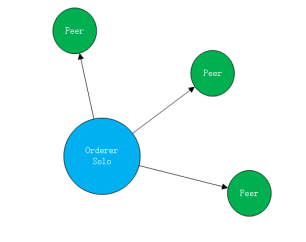
在Fabric中,有以下3中典型共识机制。 Solo共识 solo共识机制只能用于单节点模式,即只能有一个Orderer节点,因此,其共识过程很简单,每接收到一个交易信息,就在共识模块的控制下产生区块并广播给节点存储到账本中。 Solo 模式下的共识只适用于一个Orderer节点,所以可以在…...

【safari】react在safari浏览器中,遇到异步时间差的问题,导致状态没有及时更新到state,引起传参错误。如何解决
在safari浏览器中,可能会遇到异步时间差的问题,导致状态没有及时更新到state,引起传参错误。 PS:由于useState是一个普通的函数, 定义为() > void;因此此处不能用await/async替代setTimeout,只能用在返…...

京准:GPS北斗卫星授时信号安全隔离防护装置
京准:GPS北斗卫星授时信号安全隔离防护装置 京准:GPS北斗卫星授时信号安全隔离防护装置 1、主要特点 ★信号加固功能: GPS/BDS单系统信号拒止情况下(包含受到GPS L1欺骗干扰、GPS L1压制干扰、BDS B1欺骗干扰、BDS B1压制干扰&…...

解决方案架构师系列 - AWS - Pinpoint
AWS Pinpoint介绍 Amazon Pinpoint 为营销人员和开发人员提供了一款可自定义的工具,助力他们大规模地开展跨渠道、行业和活动的客户通信。 Amazon Pinpoint是一个全面的客户参与平台,旨在帮助营销人员和开发人员大规模地开展跨渠道、行业和活动的客…...

MF173:将多个工作表转换成PDF文件
我给VBA的定义:VBA是个人小型自动化处理的有效工具。利用好了,可以大大提高自己的工作效率,而且可以提高数据的准确度。“VBA语言専攻”提供的教程一共九套,分为初级、中级、高级三大部分,教程是对VBA的系统讲解&#…...

Docker、containerd、CRI-O 和 runc 之间的区别
容器与 Docker 这个名称并不紧密相关。你可以使用其他工具来运行容器 您可以使用 Docker 或一堆非Docker 的其他工具来运行容器。docker只是众多选项之一,Docker(公司)在生态系统中创建了一些很棒的工具,但不是全部。 容器方面有…...

PRISM-Python 中的规则一个简单的 Python 规则感应系统
欢迎来到雲闪世界.PRISM 是一种现有算法(尽管我确实创建了一个 Python 实现),PRISM 相对简单,但在机器学习中,有时最复杂的解决方案效果最好,有时最简单的解决方案效果最好。然而,当我们希望建立…...

DB-GPT:LLM应用的集大成者
整体架构 架构解读 可以看到,DB-GPT把架构抽象为7层,自下而上分别为: 运行环境:支持本地/云端&单机/分布式等部署方式。顺便一提,RAY是蚂蚁深度参与的一个开源项目,所以对RAY功能的支持应该非常完善。…...
汉明权重(Hamming Weight)(统计数据中1的个数)VP-SWAR算法
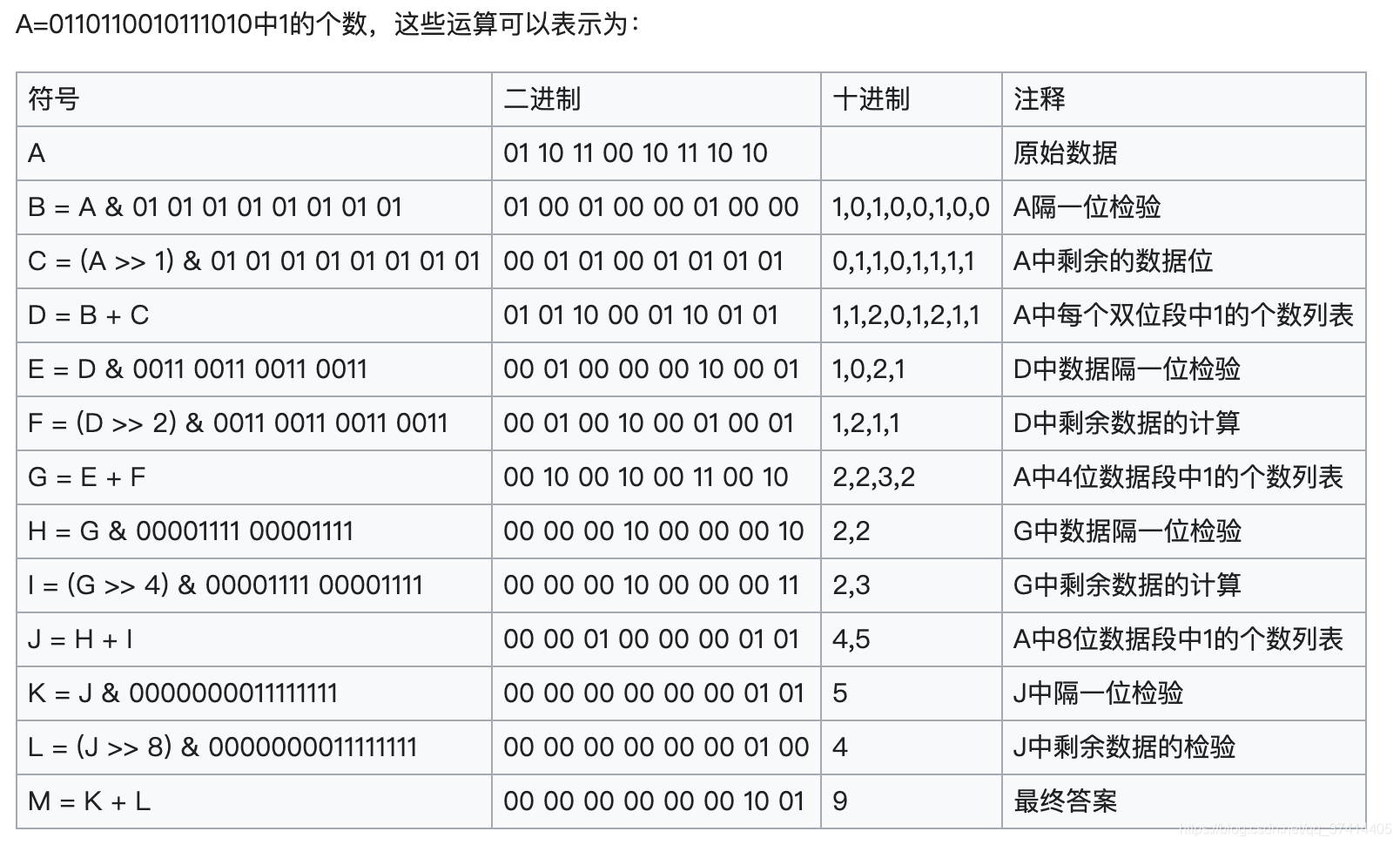
汉明权重(Hamming Weight)(统计数据中1的个数)VP-SWAR算法 定义 汉明重量是一串符号中非零符号的个数。它等于同样长度的全零符号串的汉明距离(在信息论中,两个等长字符串之间的汉明距离等于两个字符串对应位置的不同…...

基于 PyTorch 的模型瘦身三部曲:量化、剪枝和蒸馏,让模型更短小精悍!
基于 PyTorch 的模型量化、剪枝和蒸馏 1. 模型量化1.1 原理介绍1.2 PyTorch 实现 2. 模型剪枝2.1 原理介绍2.2 PyTorch 实现 3. 模型蒸馏3.1 原理介绍3.2 PyTorch 实现 参考文献 1. 模型量化 1.1 原理介绍 模型量化是将模型参数从高精度(通常是 float32࿰…...

二、原型模式
文章目录 1 基本介绍2 实现方式深浅拷贝目标2.1 使用 Object 的 clone() 方法2.1.1 代码2.1.2 特性2.1.3 实现深拷贝 2.2 在 clone() 方法中使用序列化2.2.1 代码 2.2.2 特性 3 实现的要点4 Spring 中的原型模式5 原型模式的类图及角色5.1 类图5.1.1 不限制语言5.1.2 在 Java 中…...

【目标检测】Anaconda+PyTorch(GPU)+PyCharm(Yolo5)配置
前言 本文主要介绍在windows系统上的Anaconda、PyTorch、PyCharm、Yolov5关键步骤安装,为使用yolo所需的环境配置完善。同时也算是记录下我的配置流程,为以后用到的时候能笔记查阅。 Anaconda 软件安装 Anaconda官网:https://www.anaconda…...

Django实战项目之进销存数据分析报表——第二天:项目创建和 PyCharm 配置
在上一篇博客中,我们讨论了如何搭建一个全栈 Web 应用的开发环境,包括 Python 环境的创建、Django 和 MySQL 的安装以及前端技术栈的选择。现在,让我们继续深入,学习如何在 PyCharm 中创建一个新的 Django 项目并进行配置。 一…...

静态路由实验
1.实验拓扑图 二、实验要求 1.R6为ISP,接口IP地址均为公有地址,该设备只能配置IP地址,之后不能再对其进行任何配置; 2.R1-R5为局域网,私有IP地址192.168.1.0/24,请合理分配; 3.R1、R2、R4&…...

VSCode STM32嵌入式开发插件记录
要卸载之前搭建的VSCode嵌入式开发环境了,记录一下用的插件。 1.Cortex-Debug https://github.com/Marus/cortex-debug 2.Embedded IDE https://github.com/github0null/eide 3.Keil uVision Assistant https://github.com/jacksonjim/keil-assistant/ 4.RTO…...

linux cpu 占用超100% 分析。
感谢: https://www.cnblogs.com/wolfstark/p/16450131.html 总结: 查看进程中各个线程占用百分比 top -H -p <pid> 某线程100%了 说明 任务处理不过来 会卡 但是永远不可能超100% 系统监视器里面看到的是 所有线程占用的 总和会超100%。 所以最好的情况是&…...

LayerDivider:用AI智能算法重新定义图像分层技术
LayerDivider:用AI智能算法重新定义图像分层技术 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider 在数字设计领域,图像分层是创意工…...
)
【独家首发】SITS 2026 MLOps平台内核解析:基于eBPF+Wasm的实时模型行为沙箱(实测拦截未授权数据外泄成功率99.997%)
更多请点击: https://intelliparadigm.com 第一章:AI原生模型管理:SITS 2026 MLOps完整解决方案 SITS 2026 是面向AI原生工作负载设计的下一代MLOps平台,深度集成模型生命周期治理、动态推理编排与可信AI审计能力。其核心突破在于…...

具身智能新突破:AI驱动机器人迈向真实世界
抱歉,未能检索到过去24小时内符合您特定偏好(具身智能、机器人、芯片、大模型)的10条高影响力科技新闻。这可能是因为当前时间段内相关领域的重大突破性新闻较少,或者全网实时数据源暂时未更新。不过,基于近期的行业趋…...

如何3步完成AI图像分层:设计师的终极智能图层分离指南
如何3步完成AI图像分层:设计师的终极智能图层分离指南 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider layerdivider是一款革命性的AI图像分层…...

5分钟终极指南:Steam成就管理器如何帮你找回错过的游戏成就
5分钟终极指南:Steam成就管理器如何帮你找回错过的游戏成就 【免费下载链接】SteamAchievementManager A manager for game achievements in Steam. 项目地址: https://gitcode.com/gh_mirrors/st/SteamAchievementManager 你是否曾经因为游戏Bug、存档损坏或…...

如何3步掌握图表数据提取:WebPlotDigitizer让科研数据重获新生
如何3步掌握图表数据提取:WebPlotDigitizer让科研数据重获新生 【免费下载链接】WebPlotDigitizer Computer vision assisted tool to extract numerical data from plot images. 项目地址: https://gitcode.com/gh_mirrors/we/WebPlotDigitizer 你是否曾面对…...

如何快速下载高解析无损音乐:Qobuz-DL完整指南
如何快速下载高解析无损音乐:Qobuz-DL完整指南 【免费下载链接】qobuz-dl A complete Lossless and Hi-Res music downloader for Qobuz 项目地址: https://gitcode.com/gh_mirrors/qo/qobuz-dl 想要构建个人高品质音乐库吗?Qobuz-DL这款开源音频…...

从CU、DU到AAU:手把手拆解一个O-RAN 5G小基站的软硬件架构
从CU、DU到AAU:手把手拆解一个O-RAN 5G小基站的软硬件架构 在5G网络建设的热潮中,开放无线接入网(O-RAN)正以其模块化、开放化的架构理念重塑着传统基站的形态。不同于传统封闭式基站设备由单一厂商提供"黑盒"解决方案的模式,O-RAN…...
)
手把手教你用C语言写一个Linux文件访问监控工具(基于fanotify API)
从零构建Linux文件监控工具:基于fanotify的实战指南 在服务器运维和安全审计中,实时监控关键文件的访问行为是一项基础但至关重要的需求。想象这样一个场景:你的服务器上存放着包含数据库凭证的配置文件,突然有一天你发现这些文件…...

初创团队如何利用 Taotoken 低成本启动 AI 功能开发
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初创团队如何利用 Taotoken 低成本启动 AI 功能开发 对于初创团队和独立开发者而言,在项目早期验证一个 AI 驱动的产品…...