无人机上磁航技术详解
磁航技术,也被称为地磁导航,是一种利用地球磁场信息来实现导航的技术。在无人机领域,磁航技术主要用于辅助惯性导航系统(INS)进行航向角的测量与校正,提高无人机的飞行稳定性和准确性。其技术原理是,利用搭载在无人机上的磁力计测量地磁场的强度和方向,并结合地球磁场模型,计算得到无人机的航向信息。

系统组成
无人机上磁航系统的主要组成部分包括磁力计、数据采集与处理模块以及飞行控制系统。
1. 磁力计:负责测量地磁场的强度和方向,是磁航系统的核心传感器。
2. 数据采集与处理模块:负责接收磁力计的数据,进行滤波、校准等处理,并输出航向信息。
3. 飞行控制系统:接收磁航系统输出的航向信息,结合其他导航信息(如GPS、INS等),实现无人机的自主飞行和导航。
数据采集
数据采集是磁航系统的关键步骤之一。无人机在飞行过程中,磁力计会实时测量地磁场的强度和方向,并将数据传输到数据采集与处理模块。为了获得准确的数据,需要对磁力计进行校准,以消除环境干扰和传感器误差。
数据处理
数据处理模块接收到磁力计的数据后,会进行一系列的处理操作,包括滤波、校准、解算等。滤波操作可以消除数据中的噪声和干扰;校准操作可以修正传感器误差,提高数据的准确性;解算操作则是根据地球磁场模型和测量数据,计算得到无人机的航向信息。
优势与应用
磁航技术在无人机领域具有独特的优势和应用价值。
1. 不依赖外部信号:磁航技术不依赖于外部信号源(如GPS),因此在GPS信号不可用或受到干扰的情况下,仍能保持较高的导航精度。
2. 长期稳定性好:地球磁场相对稳定,因此磁航系统具有长期稳定性好的特点,适用于长时间、长距离的飞行任务。
3. 抗干扰能力强:磁航系统不易受到电磁干扰的影响,因此在复杂电磁环境下仍能保持良好的性能。
磁航技术在无人机领域的应用非常广泛,包括但不限于以下方面:
军事侦察:无人机搭载磁航系统,可以实现精确的航向控制和导航,提高侦察效率和安全性。
农业植保:在农业植保无人机中,磁航技术可以辅助实现精确施药、播种等作业,提高作业效率和质量。
环境监测:无人机搭载磁航系统,可以实现对环境参数的精确测量和监测,为环境保护和治理提供有力支持。
发展趋势
随着无人机技术的不断发展,磁航技术也将不断进步和完善。未来,磁航技术的发展趋势主要体现在以下几个方面:
1. 高精度化:通过优化传感器设计和数据处理算法,提高磁航系统的测量精度和稳定性。
2. 智能化:结合人工智能、大数据等新技术,实现磁航系统的智能校准、故障诊断等功能,提高系统的可靠性和智能化水平。
3. 微型化:随着传感器技术的进步,磁航系统的体积和重量将不断减小,便于无人机搭载和部署。
4. 集成化:将磁航系统与其他导航系统(如GPS、INS等)进行集成,形成多功能复合导航系统,提高无人机的整体导航性能。
相关文章:
无人机上磁航技术详解
磁航技术,也被称为地磁导航,是一种利用地球磁场信息来实现导航的技术。在无人机领域,磁航技术主要用于辅助惯性导航系统(INS)进行航向角的测量与校正,提高无人机的飞行稳定性和准确性。其技术原理是&#x…...

使用 cURL 命令测试网站响应时间
文章目录 使用 cURL 命令测试网站响应时间工具介绍cURL 命令详解命令参数说明输出格式说明示例运行结果总结使用 cURL 命令测试网站响应时间 本文将介绍如何使用 cURL 命令行工具来测试一个网站的响应时间。具体来说,我们将使用 cURL 命令来测量并显示各种网络性能指标,包括 …...

「网络通信」HTTP 协议
HTTP 🍉简介🍉抓包工具🍉报文结构🍌请求🍌响应🍌URL🥝URL encode 🍌方法🍌报文字段🥝Host🥝Content-Length & Content-Type🥝User…...

科普文:后端性能优化的实战小结
一、背景与效果 ICBU的核心沟通场景有了10年的“积累”,核心场景的界面响应耗时被拉的越来越长,也让性能优化工作提上了日程,先说结论,经过这一波前后端齐心协力的优化努力,两个核心界面90分位的数据,FCP平…...

LeetCode-day23-3098. 求出所有子序列的能量和
LeetCode-day23-3098. 求出所有子序列的能量和 题目描述示例示例1:示例2:示例3: 思路代码 题目描述 给你一个长度为 n 的整数数组 nums 和一个 正 整数 k 。 一个 子序列的 能量 定义为子序列中 任意 两个元素的差值绝对值的 最小值 。 请…...
CSS3雷达扫描效果
CSS3雷达扫描效果https://www.bootstrapmb.com/item/14840 要创建一个CSS3的雷达扫描效果,我们可以使用CSS的动画(keyframes)和transform属性。以下是一个简单的示例,展示了如何创建一个类似雷达扫描的动画效果: HTM…...

单例模式懒汉模式和饿汉模式
线程安全 单例模式在单线程中,当然是安全的。但是如果在多线程中,由于并行判断,可能会导致创建多个实例。那么如何保证在多线程中单例还是只有一个实例呢? 常见的三种方式: 局部静态变量 原理和饿汉模式相似,利用static只会初始…...

python __repr__和__str__区别
1. __repr__ __repr__ 方法由 repr() 内置函数调用,用于计算对象的“正式”字符串表示形式。理想情况下,这个字符串应该看起来像一个有效的 Python 表达式,可以在适当的环境下用来重新创建具有相同值的对象。如果这不可能实现,那…...

huawei USG6001v1学习----NAT和智能选路
目录 1.NAT的分类 2.智能选路 1.就近选路 2.策略路由 3.智能选路 NAT:(Network Address Translation,网络地址转换) 指网络地址转换,1994年提出的。NAT是用于在本地网络中使用私有地址,在连接互联网时转而使用全局…...

FPGA JTAG最小系统 EP2C5T144C8N
FPGA的文档没有相应的基础还真不容易看懂,下面是B站上对FPGA文档的解读(本文非对文档解读,只是为个人记录第三期:CycloneIV E最小系统板设计(一)从Datasheet上获取FPGA的基本参数_哔哩哔哩_bilibili 电源部份 核心电…...
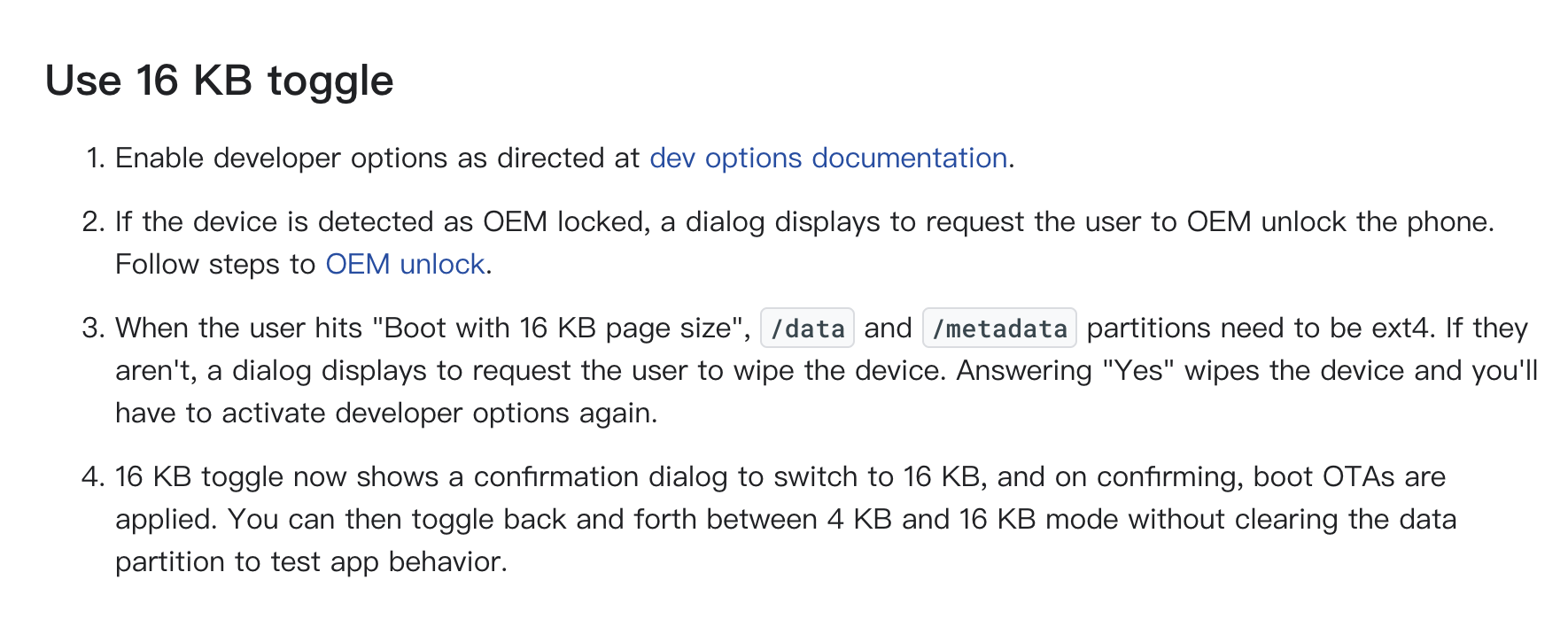
Android 15 之如何快速适配 16K Page Size
在此之前,我们通过 《Android 15 上 16K Page Size 为什么是最坑》 介绍了: 什么是16K Page Size为什么它对于 Android 很坑如何测试 如果你还没了解,建议先去了解下前文,然后本篇主要是提供适配的思路,因为这类适配…...

学习unity官方的网络插件Netcode【一】
对bool值的个人理解: using Unity.Netcode; using UnityEngine; //个人理解:通过Rpc完成了一次客户端给服务端发消息,服务端再向所有客户端广播消息 public class RpcTest : NetworkBehaviour {public override void OnNetworkSpawn(){if (!…...

QT写一个mainWindow
切换风格的写法: 先看看样式效果: mian_window.h文件 #ifndef MAINWINDOW_H #define MAINWINDOW_H#include <QMainWindow>class MainWindow : public QMainWindow {Q_OBJECTpublic:MainWindow(QWidget *parent nullptr);~MainWindow();void Ini…...
)
Java查找算法练习(2024.7.23)
顺序查找 package SearchExercise20240723; import java.util.Scanner; public class SearchExercise {public static void main(String[] args) {Scanner sc new Scanner(System.in);System.out.println("需要多大的数组?");int size sc.nextInt();int[] array …...

洗地机哪个牌子好?四款口碑最好的洗地机排名推荐
随着“懒人经济”的出现,越来越多的人开始使用洗地机。洗地机哪个牌子好?为了帮助大家在这个琳琅满目的市场中做出明智决策,本文特别整理了四款口碑最好的洗地机排名推荐,它们凭借出色的清洁效果、智能化的操作体验以及用户的高度…...

如何提升短视频的曝光量和获客效能?云微客来解决
在流量至上的当下,短视频凭借其优势,迅速成为了众多企业获客引流的核心营销手段。进入短视频赛道后,如何提升短视频的曝光量和获客效能,就成为了众多企业亟待解决的焦点。 如果你不想投入大量的广告预算,还想在短视频平…...

SpringBoot开发中如何缓存数据, 减少数据库的访问频率?
一:自定义是否开启缓存 方法一: 在不同环境的配置文件中如application-dev.yml、application-test.yml、application-prod.yml,修改 spring.cache.type none; spring:cache:type: none 方法二: 自定义配置 application.yml&…...

PostgreSQL如何在windows/linux开启归档
linux开启归档: archive_mode onarchive_command test ! -f /mnt/pg12/archivedir/%f && cp %p /mnt/pg12/archivedir/%fwindows开启归档: archive_mode onarchive_command copy "%p" "C:\\server\\pg12\\archivedir\\%f&q…...

【启明智显分享】基于国产Model3芯片的7寸触摸屏助力智慧医疗,电子床头屏提升护理交互
未来医院必然是以信息化为基础,以物联网为特征,以医疗为核心的服务型医院。病房作为医院的重要服务场所,成为智慧医院建设的重要一环。 为提高医护人员与患者的互动交流,给医疗注入智慧元素,让患者享受智能服务&#…...

从理论到实践:如何用 TDengine 打造完美数据模型
在用 TDengine 进行数据建模之前,我们需要回答两个关键问题:建模的目标用户是谁?他们的具体需求是什么?在一个典型的时序数据管理方案中,数据采集和数据应用是两个主要环节。如下图所示: 对于数据采集工程师…...

彻底告别Row-By-Row:标量子查询外连接改写与向量化引擎深潜
在实际的复杂业务系统开发与运维中,SQL查询的结构往往会随着业务复杂度的提升而变得臃肿不堪。为了保证代码的可读性和逻辑的直观性,开发者非常喜欢使用 CTE(公共表表达式)、多层子查询、窗口函数,以及标量子查询&…...

2025年知识竞赛行业趋势报告:智能化、场景化与生态融合
📊 2025年知识竞赛行业趋势报告技术更智能 场景更融合 内容更鲜活 工具更普惠🚀 引言:变革中的竞赛生态知识竞赛,这一古老的知识检验与娱乐形式,在数字技术的持续赋能下,正经历着一场深刻的范式变革。从…...

Sora-FullStack全栈开发框架:构建AI视频生成应用的工程实践
1. 项目概述:一个全栈式Sora应用开发框架的诞生最近在AI视频生成领域,Sora的横空出世无疑点燃了无数开发者和创业者的热情。但兴奋过后,一个现实问题摆在眼前:如何将Sora这类前沿模型的能力,真正落地成一个稳定、可用、…...

Adafruit Metro ESP32-S3开发板深度评测:从硬件解析到低功耗物联网实践
1. 项目概述:为什么选择Metro ESP32-S3作为你的下一个开发平台?如果你正在寻找一块既能快速原型开发,又能直接用于产品部署,同时兼顾了强大无线连接、丰富生态和极低功耗的开发板,那么Adafruit Metro ESP32-S3绝对是一…...

大模型接入业务系统:如何用RAG技术让AI精准回答内部文档问题?
本文探讨了如何利用RAG(检索增强生成)技术使大模型能够回答公司内部文档问题。文章首先介绍了企业面临的需求挑战,即大模型缺乏对私有内部知识的理解。接着详细解析了RAG的基本原理,即通过检索相关资料再让大模型生成答案。随后&a…...

从10G到40G/50G:UltraScale+以太网IP核升级实战与GT资源规划
1. 从10G到40G/50G的升级挑战 当你第一次把项目从10G升级到40G/50G以太网时,最直观的感受就是"资源突然不够用了"。我去年接手一个视频处理项目时就深有体会——原本在10G环境下游刃有余的FPGA设计,切换到40G后GT资源立刻捉襟见肘。这里说的GT…...

如何快速搭建大众点评数据采集系统:Python爬虫完整指南
如何快速搭建大众点评数据采集系统:Python爬虫完整指南 【免费下载链接】dianping_spider 大众点评爬虫(全站可爬,解决动态字体加密,非OCR)。持续更新 项目地址: https://gitcode.com/gh_mirrors/di/dianping_spider…...

基于SpringBoot的民宿预订与评价系统毕业设计
博主介绍:✌ 专注于Java,python,✌关注✌私信我✌具体的问题,我会尽力帮助你。一、研究目的本研究旨在构建一个基于Spring Boot与Vue框架的民宿预订与评价系统以解决当前旅游住宿服务领域存在的信息不对称问题用户体验碎片化问题以及数据管理分散化问题该…...

大语言模型驱动SVG代码生成:原理、实践与应用前景
1. 项目概述:当大语言模型遇上SVG图形生成最近在开源社区里,一个名为“ximinng/LLM4SVG”的项目引起了我的注意。这个项目名字直译过来就是“用于SVG的大语言模型”,它瞄准了一个非常具体且有趣的交叉领域:利用大语言模型来生成或…...

中国500万医生的新AI:顶刊独家联手,卷的就是证据源
金磊 发自 杭州量子位 | 公众号 QbitAI很反差。明明是一场AI的发布会,台下却坐满了医学界的大佬们:有北大、清华的,有浙江、上海的,甚至医学顶刊BMJ集团的主编都来围观了……△图片由AI生成为啥会这样?因为阿里健康正式…...