Stm32-使用TB6612驱动电机及编码器测速
这里写目录标题
- 起因
- 一、电机及编码器的参数
- 二、硬件
- 三、接线
- 四、驱动电机
- 1、TB6612电机驱动
- 2、定时器的PWM模式驱动电机
- 五、编码器测速
- 1、定时器的编码器接口模式
- 2、定时器编码器模式测速的原理
- 3、编码器模式的配置
- 4、编码器模式相关代码
- 5、测速方法
- 六、相关问题以及解答
- 1、编码器模式下的自动重装值ARR和预分频PSC应该如何设置
- 2、如何判断正反转
- 3、圈数如何计算
- 4、转速如何计算
- 5、为什么我的编码器没有输出,获取到的脉冲数是0
- 七、测速硬件展示及测速现象
- 八、总结
- 九、大家可以参考
- 参考链接1
- 参考链接2
- 参考链接3
- 参考链接4
起因
最近在学习编码电机以及尝试使用编码电机测速。遇到了很多问题,花费了很多时间,在这里做一个记录,对自己学习到的知识进行一个总结
找了很多资料,看了很多视频,这些太多了,以至于让我不知道究竟哪一个是正确的,今天看这个,明天看这个,导致自己的学习效率低下
当然,有很多大佬的文章和资料给了我很大的启发
这个电机我玩了四天,把自己觉得重要的东西和大家分享一下
现在一般都是用编码器电机,参加比赛啥的,编码电机常用于测速,所以编码电机就成了一个必须学习的知识点
编码器被广泛应用于电机测速,实现电机闭环控制。
相关的知识点有:定时器的输出比较(输出PWM)、定时器的输入捕获,定时器的编码器接口、速度控制
一、电机及编码器的参数
编码电机其实就是一个带有编码器的电机,我的这个电机是一个增量式的带霍尔传感器的电机
电机的型号是JGB37-520电机
下方是电机的参数
主要关注的就是电机的额定电压 12V
电机的减速比 30(这个很重要)
编码器的参数
主要关注编码器的线数 11线 (也就是说电机转一圈会产生11个脉冲)
供电电压 5V
输出类型 方波

编码器的连接
一般这种编码器都有六根线
两边靠外的两根线是电机电源线
往里两根是编码器的电源线
中间两根是编码器的A,B相
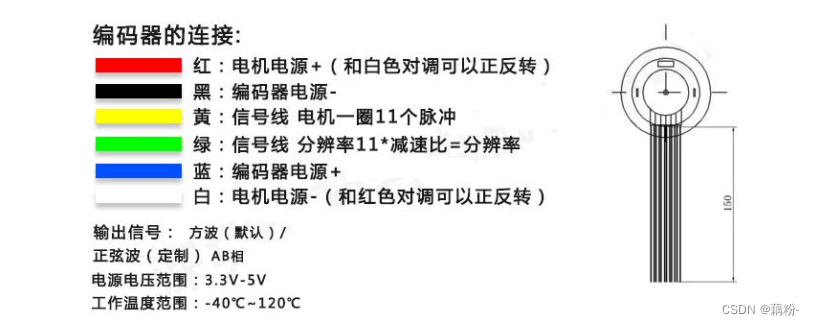
具体大概是啥意思呢?
就是电机转动的时候编码器会通过编码电机的A相和B相输出两个正交的方波
通过输出的两个方波就可以对电机进行测速和识别电机的方向
二、硬件
整体结构采用洞洞板+TB6612+Stm32C8T6+编码电机(起初采用的是这种结构)
后面采用Stm32ZET6+TB6612+洞洞板+编码电机+12V电源(原因是C8T6烧坏了,哭😥)
主控Stm32C8T6 or Stm32ZET6
电机驱动 TB6612(由于上一个L298N烧了)
520霍尔编码电机
12V电源
三、接线
这里展示驱动一个编码电机的示例,毕竟先从一个电机玩起,弄懂后后面就会使用的更加得心应手啦
主要使用到了定时器的PWM模式(输出比较)功能
大家一定要认真接线,看清出每根线的作用,不要随便接线,一不小心电机驱动就烧了,或者是单片机烧了(在学习的时候就烧了一个单片机,人民币-15)
注意这个是我实现的接线,大家可以根据自己单片机的片上资源合理选择,选择合适的IO口
电机驱动
TB6612 | C8T6 |
|---|---|
| STBY | 高电平(+3.3V) |
| AIN1 | PB14 |
| AIN2 | PB15 |
PWMA | PA8 (TIM1-CH1) |
| AO1 | 电机电源+ |
| AO2 | 电机电源- |
| VM | 12V |
| VCC | 3.3V |
| GND | 和单片机共地 |
编码器
| 编码器的A、B相 | C8T6 |
|---|---|
| A相 | PA0 (TIM2-CH1) |
| B相 | PA1 (TIM2-CH2) |
四、驱动电机
1、TB6612电机驱动
首先了解一下TB6612
下图是TB6612驱动模块
原理图
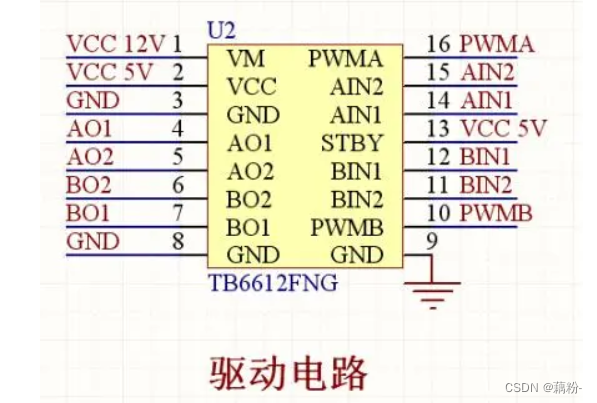
STBY接高电平 清零电机全部停止
置 1 通过 AIN1 AIN2, BIN1,BIN2 引脚来控制正反转
PWM引脚控制占空比
VM: 接 12V 以内电源
VCC: 接 5V 电源
GND: 接电源负极
下图是驱动逻辑
可以看出IN引脚控制正反转,PWM引脚控制速度

2、定时器的PWM模式驱动电机
使用定时器的PWM模式 生成一个需要的 占空比可调的 频率 符合要求的方波信号。
方波信号的频率不宜过高或者过低,过高容易导致电机驱动的晶闸管经常处于开关状态–发热巨大;过低则容易产生噪音,对电机也低频的冲击
这里输出PWM信号的定时器是TIM1-CH1
设置成PWM模式,频率和占空比可调
有关定时器PWM模式,可以看其他大佬的文章和资料,看看手册
可以看看江科大的教学视频,比我讲的详细多了,也很好理解
我贴出视频链接,大家学习32的时候可以跟他
TIM输出比较,PWM模式
下方的PWM模式的代码作为一个参考
Motor.h
#ifndef __MOTOR_H
#define __MOTOR_H
#include "sys.h" #define PWMA TIM1->CCR1 //PA8 PWMA TIM1_CH1
#define AIN2 PBout(15)
#define AIN1 PBout(14)void Motor_PWM_Init(u16 arr,u16 psc);
void Motor_SetSpeed(u8 mode ,u16 speed);#endif
Motor.c
void Motor_Init(void) //IN引脚初始化
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14|GPIO_Pin_15; //端口配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50MGPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB
}
void Motor_PWM_Init(u16 arr,u16 psc) //PWM引脚初始化
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;Motor_Init();RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1 | RCC_APB2Periph_AFIO,ENABLE);//开启时钟//输出TIM1 CH1 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);//初始化定时器。TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMxTIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能 高级定时器一定要写这个语句TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器TIM_Cmd(TIM1, ENABLE); //使能TIM1
}void Motor_SetSpeed(u8 mode ,u16 speed) //mode 代表正反转 speed PWM占空比即速度
{PWMA = speed;if(mode==1){AIN1 = 1;AIN2 = 0;}else {AIN1 = 0;AIN2 = 1;}
}五、编码器测速
编码器一般应用于电机控制,使用PWM驱动电机,然后再使用编码器测量速度,再使用PID算法进行闭环控制
记住下面这句话
在一定的时间内,电机转动一圈,通过霍尔传感器的A、B两相输出一定数量的脉冲,我们可以根据一定时间内的脉冲数计算出电机的瞬时速度。
1、定时器的编码器接口模式
采用的是定时器的编码器接口模式,Stm32中的定时器只有TIM1-5和TIM8才有编码器接口功能,而且只有CH1通道和CH2通道有用。
2、定时器编码器模式测速的原理
原理:接收编码器的A、B相产生的正交信号,根据编码器产生的正交信号脉冲,自动控制CNT自增或自减,根据计数方向和编码器的信号关系来指示编码器的位置、旋转方向和旋转速度,利用脉冲值来计算电机的转动位移
这个可以参考手册里定时器的编码器模式,比我讲的清楚多了
定时器的编码器接口托管了输入捕获的前两个接口
还有一句话记住,编码器模式下就相当于一个带有方向选择的外部时钟
3、编码器模式的配置
具体配置流程就是
时钟–>GPIO–>时基单元配置–>编码器接口配置–>开启定时器–>读取一个时间段内的脉冲–>计算电机旋转轴转速
使用这个函数把定时器设置为编码器接口模式
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
采用的是编码器模式3,在TI1和TI2边沿都计数,也就是在一个周期内对A相和B相的上升沿下降沿都计数,一个周期内计4次,所以采用这种模式后,相应的计数值(CNT)就会变成4倍,这就是很多资料里说的四倍频计数。
4、编码器模式相关代码
采用的是定时器2的编码器接口模式,通道1和通道2捕获
encoder.c
/*** @brief 把TIM2初始化为编码器接口模式* @param psc 预分频系数* @param arr 自动重装载值* @retval None*/
void Encoder_Init_TIM2(uint16_t psc,uint16_t arr)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_ICInitTypeDef TIM_ICInitStructure;GPIO_InitTypeDef GPIO_InitStructure;//NVIC_InitTypeDef NVIC_InitStructure;//使能定时器2的时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能PB端口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//端口配置GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;//浮空输入GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//根据设定参数初始化GPIOBGPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);// 预分频器TIM_TimeBaseStructure.TIM_Prescaler = psc;//设定计数器自动重装值TIM_TimeBaseStructure.TIM_Period = arr;//选择时钟分频:不分频TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//TIM向上计数TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);//使用编码器模式3TIM_EncoderInterfaceConfig(TIM2, \TIM_EncoderMode_TI12, \TIM_ICPolarity_Rising, \TIM_ICPolarity_Rising);TIM_ICStructInit(&TIM_ICInitStructure);TIM_ICInitStructure.TIM_ICFilter = 10;TIM_ICInit(TIM2, &TIM_ICInitStructure);//清除TIM的更新标志位TIM_ClearFlag(TIM2, TIM_FLAG_Update);TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//Reset counterTIM_SetCounter(TIM2,0);TIM_Cmd(TIM2, ENABLE);
}/*** @brief 单位时间读取编码器计数* @param TIMX 定时器* @retval 速度值 是编码器返回的脉冲*/
int Read_Encoder()
{int Encoder_TIM;Encoder_TIM= (short)TIM2 -> CNT;//Encoder_TIM= (int)((int16_t)(TIM4->CNT));;TIM2 -> CNT=0;return Encoder_TIM;
}
encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H#include "sys.h"void Encoder_Init_TIM2(uint16_t psc,uint16_t arr);
int Read_Encoder();#endif
5、测速方法
在一个时间周期T0内,定时的读取编码器产生的脉冲,以我的编码器为例(11线,减速比30),转一圈会产生1320个脉冲(因为采用的是编码模式3)
这个1320 = 11 * 30 * 4
通过在固定的周期T0内,产生的脉冲就相当于路程,而这个固定的周期就相当于时间
所以速度就等于 在T0这段时间获取到的脉冲总数/(编码器单圈产生的总脉冲数*T0)
对于我的电机就是
T0这段时间获取到的脉冲总数/(1320*T0)
六、相关问题以及解答
在看了前面之后,应该对编码器模式和编码器测速有了一个大概的认识,知道了它测速的原理,但肯定有好多疑问,我把我学习过程中遇到的问题和解决方法做一个总结,你肯定也有这些疑问,不要着急,看下去。
1、编码器模式下的自动重装值ARR和预分频PSC应该如何设置
ARR,自动重装值,指的是CNT计数自增或自减到ARR就会溢出,(可以产生中断),然后继续从0开始计数。
PSC,预分频系数,(前面不是说过编码器相当于一个外部时钟吗),PSC相当于外部时钟的频率,如果分频(假设PSC=2)的话,就会(比如电机转一圈产生100个脉冲),此时编码器模式下只能计数50个脉冲。
所以我们应该如何设置?
PSC呢? PSC没有必要设置,因为我要计数的本来就是电机转动一圈产生的真实脉冲,所以PSC给0就好啦
ARR呢? 目前在各种论坛和博客和资料中有两种版本。
第一种,根据电机的线数和减速比来设置,比如我的电机是11线,减速比30,转动一圈的脉冲数是1320,这个值就可以设置为1320。
产生的脉冲数恰好是你定时器溢出的时候,溢出一次记录一次,这个的次数就是电机的圈数(当然这种误差很大)
也就是说电机转一圈正好是1320,当CNT计数到ARR时,计数器就会清零并且重新计数,所以这个ARR就是电机转一圈产生的脉冲数的最大值。
第二种,直接设置成定时器ARR的最大值,也就是65535(2^16-1),这样设置的目的就是无论你电机产生多少脉冲,都可以记录,且不会溢出。
不过使用65535的话,就要在最开始的时候初始化编码器模式提前把CNT清零,然后再开始计数。再在一个周期内定时读取脉冲数,再清零,这个脉冲也是周期内读取到的脉冲值。
电机旋转一圈能产生脉冲,那么我们就能记录一段时间产生的脉冲数来计算速度
2、如何判断正反转
可以通过判断CR1寄存器中的DIR位,这个位是计数方向位

正转就是CNT向上计数(DIR==0)
反转就是CNT向下计数(DIR==1)
3、圈数如何计算
就是上方说的,把ARR设置为电机旋转一周产生的脉冲数
电机转一圈,CNT达到ARR,溢出,进中断,设置一个变量++(正转),–(反转)
4、转速如何计算
规定某个某个时钟周期内,读取有多少脉冲,从而计算转速
这里采用的是M法测速,测出的是电机是多少转/s
脉冲相当于路程,某个时钟周期相当于时间
这个上方有描述,可以往上翻翻
5、为什么我的编码器没有输出,获取到的脉冲数是0
检查一下接线,从硬件开始,一步一步排查,对应的引脚是否正确
检查电源,编码器的电源是否打开,相应的PWM波是否有效
硬件确认没有错误,检查软件,编码器接口是否打开,PWM模式是否输出,电机IN引脚是否配置
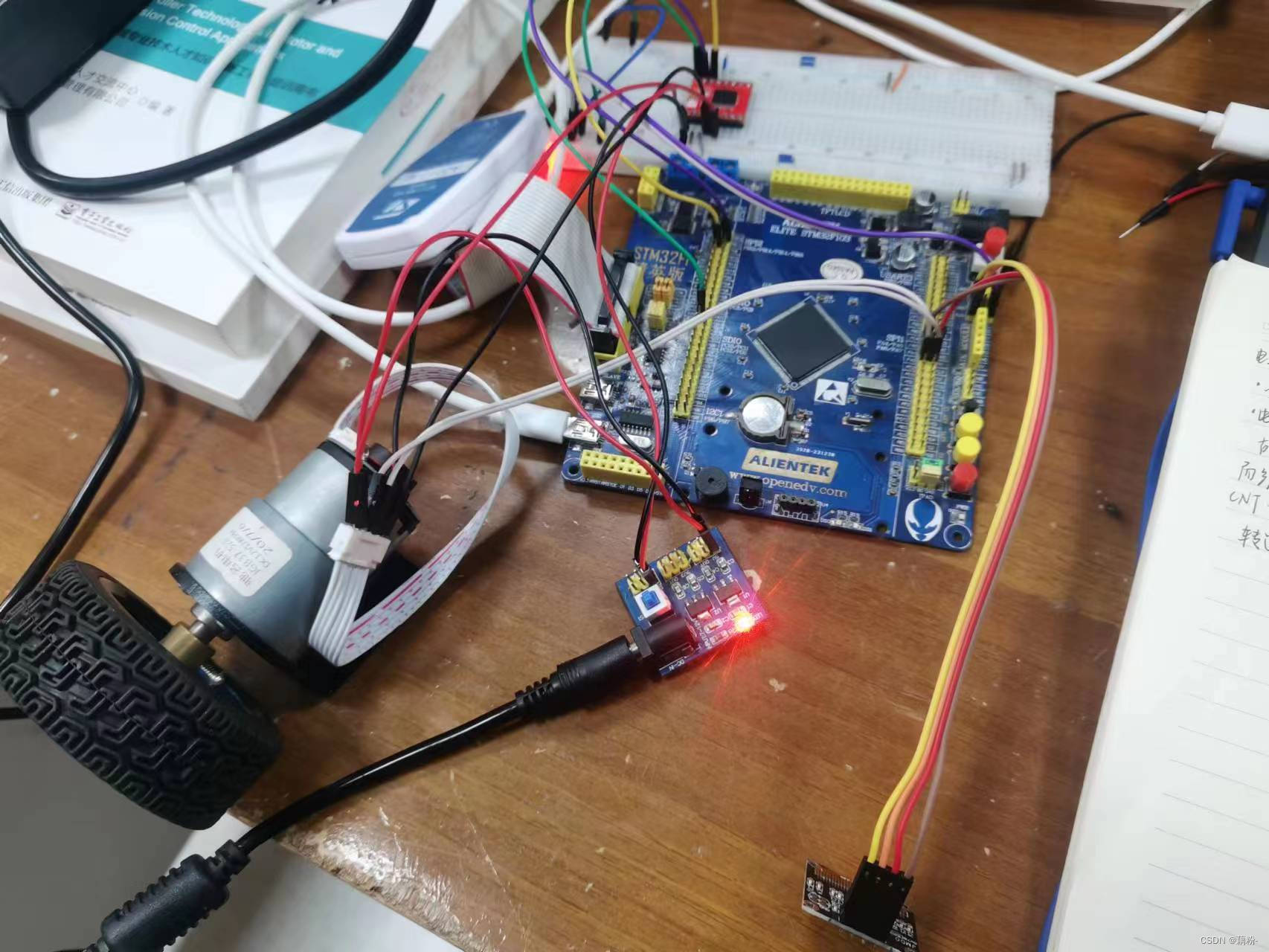
七、测速硬件展示及测速现象
硬件展示
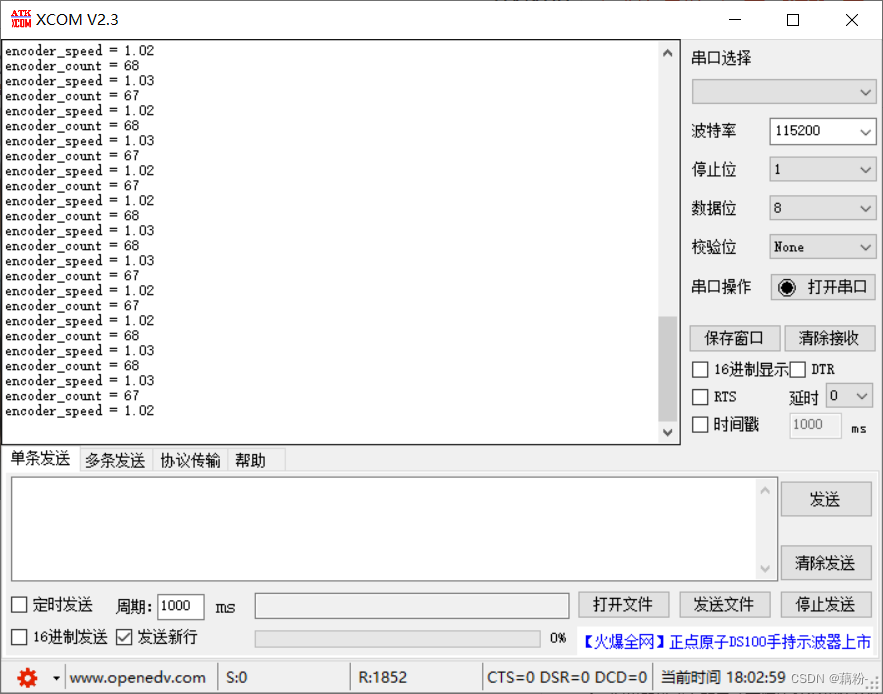
测速展示
可以看到当转速为1的时候,产生的脉冲是66-68,而我设置的闸门时间是50ms,结合电机转一圈是1320个脉冲,也就是说测量的脉冲数几乎正确。
(66*2=132) 和编码器的线数完全吻合,测速成功!!!
八、总结
这个编码器花费了我几乎四天的时间,也可能是自己比较小白,不懂得如何通过电机转一圈产生的脉冲数来计算速度,第一天就实现了读取脉冲
但是后面几天执着于测速,没有采取正确的方法,导致自己无线内耗,浪费了大量时间。
由于网上资料繁杂,找不到自己想要的,浪费了很多时间,很多只是一笔带过,没有系统的讲解原理和方法,我也不知道自己这篇文章是否正解
所以将这个学习总结分享给大家
当然,这都是在借鉴了前人的肩膀下,谢谢各位大佬和优秀的文章,我会在下方贴出自己觉得值得一看大佬们的链接,大家可以一看
欢迎大家指错,看到了就会修改,大家一起共同进步。
九、大家可以参考
参考链接1
带霍尔传感器编码器的直流减速电机测速原理讲解(附源码)-OpenEdv-开源电子网
参考链接2
编码器分类及原理和测速应用(含代码) - 古月居
参考链接3
stm32平衡小车(2)-----编码器电机驱动
参考链接4
带编码器的直流减速电机——基于STM32F407_编码器直流减速电机磁极数目_谁还不是个程序猿的博客
谢谢各位大佬的文章,让我受益匪浅,站在前人的肩膀下才能看的更远
相关文章:
Stm32-使用TB6612驱动电机及编码器测速
这里写目录标题起因一、电机及编码器的参数二、硬件三、接线四、驱动电机1、TB6612电机驱动2、定时器的PWM模式驱动电机五、编码器测速1、定时器的编码器接口模式2、定时器编码器模式测速的原理3、编码器模式的配置4、编码器模式相关代码5、测速方法六、相关问题以及解答1、编码…...

【JS】常用js方法
1、判断是否是数组、字符串等方法a instanceof ba是你需要判断的数据b是判断的类型//直接判断原型 var a [1,5,8] var b 123456console.log(a instanceof Array)//true console.log(a instanceof String)//falseconsole.log(b instanceof String)//true2、分割字符串a.split(…...

Android---动态权限申请
目录 权限分类 动态权限核心函数 简易实现案例 完整代码 Google 在 Android 6.0 开始引入了权限申请机制,将所有权限分成了正常权限和危险权限。App 每次在使用危险权限时需要动态的申请并得到用户的授权才能使用。 权限分类 系统权限分为两类:正常…...

【Linux】环境变量(基本概念 常见环境变量 测试PATH 环境变量相关命令)
文章目录环境变量基本概念常见环境变量测试PATH别的环境变量通过系统调用获取或设置环境变量环境变量相关命令export: 设置一个新的环境变量set: 显示本地定义的shell变量和环境变量unset: 清除环境变量通过代码如何获取环境变量环境变量 基本概念 环境变量(environment vari…...

安全牛+瑞数信息:《数据安全管控平台应用指南》报告共同发布
随着《中华人民共和国网络安全法》《中华人民共和国数据安全法》《中华人民共和国个人信息保护法》和《关键信息基础设施安全保护条例》“三法一条例”的陆续发布,从国家、社会与个人已经逐步形成了加强数据安全保护的态势。 2023年1月中旬,工业和信息化…...
【洛谷刷题】蓝桥杯专题突破-深度优先搜索-dfs(6)
目录 写在前面: 题目:P1683 入门 - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) 题目描述: 输入格式: 输出格式: 输入样例: 输出样例: 解题思路: 代码: AC &a…...
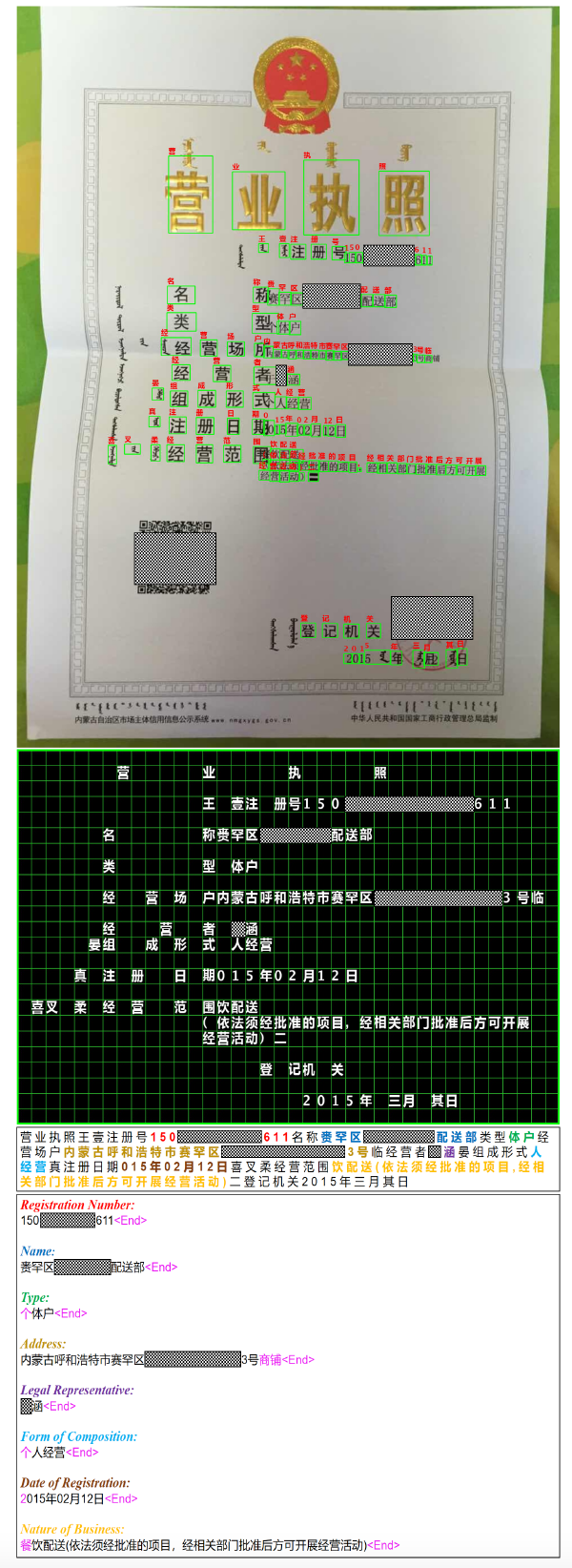
论文解读TCPN
一、简要介绍视觉信息提取(VIE)近年来受到了越来越多的关注。现有的方法通常首先将光学字符识别(OCR)结果组织成纯文本,然后利用标记级实体注释作为监督来训练序列标记模型。但是,它花费大量的注释成本&…...

性能优化之防抖与节流
(一)防抖 (1)定义:单位事件内,频繁触发,只执行最后一次(像王者荣耀的回城操作) (2)使用场景:搜索输入框、手机号邮箱输入检测 &…...

数组模拟单链表
实现一个单链表,链表初始为空,支持三种操作: 向链表头插入一个数; 删除第 k个插入的数后面的数; 在第 k个插入的数后插入一个数。 现在要对该链表进行 M次操作,进行完所有操作后,从头到尾输出整…...

蓝桥杯刷题第十四天
第二题:不同子串题目描述本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。一个字符串的非空子串是指字符串中长度至少为 1 的连续的一段字符组成的串。例如,字符串aaab 有非空子串 a, b, aa, ab, aaa, aa…...

面试了8家软件公司测试岗位,面试题大盘点,我真的尽力了
包含的模块:本文分为十九个模块,分别是:软件测试 基础、liunx、MySQL、web测试、接口测试、APP测试 、管理工具、Python、性能测试、selenium、lordrunner、计算机网络、组成原理、数据结构与算法、逻辑题、人力资源需要的可以看文末获取方式…...
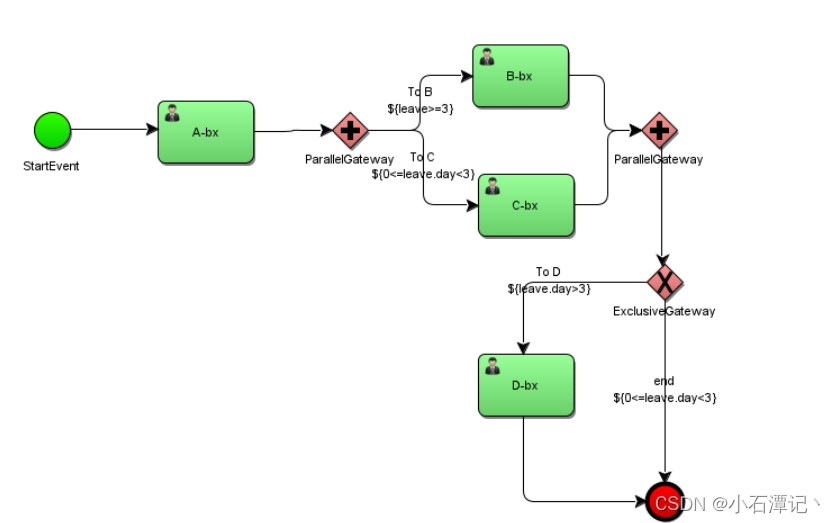
Activiti 工作流简介
1、什么是工作流 工作流(Workflow),就是通过计算机对业务流程自动化执行管理。它主要解决的是“使在多个参与者之间按照某种预定义的规则自动进行传递文档、信息或任务的过程,从而实现某个预期的业务目标,或者促使此目标的实现”。 1.2、工作…...

【华为机试真题详解 Python实现】统计差异值大于相似值二元组个数【2023 Q1 | 100分】
文章目录 前言题目描述输入描述输出描述题目解析参考代码前言 《华为机试真题详解》专栏含牛客网华为专栏、华为面经试题、华为OD机试真题。 如果您在准备华为的面试,期间有想了解的可以私信我,我会尽可能帮您解答,也可以给您一些建议! 本文解法非最优解(即非性能最优)…...

【C++】Google编码风格学习
Google规范线上地址:https://zh-google-styleguide.readthedocs.io/en/latest/ 文章目录1. 头文件2. 作用域3. 类4. 函数5. 其他C特性6. 命名约定7. 注释8. 格式1. 头文件 每个cpp/cc文件都对应一个h头文件,除单元测试代码和只包含main()的文件外。 所…...

JavaScript 中的Promise 函数
JavaScript 中的Promise 函数 目录JavaScript 中的Promise 函数1 创建Promise2 Promise的方法3 Promises的状态4 Promise的使用5 返回 Promise 类型6 Promise级联使用在现在的前端开发中我们常常会使用到 JavaScript Promise 函数,但是很多人都不能正确理解Promise …...

学校教的Python,找工作没企业要,太崩溃了【大四真实求职经历】
如果只靠学校学的东西去找工作,能找到工作吗? 今天给大家看一个粉丝的真实求职案例,想做Python方面的工作,投了二十几个简历却没人要,心态崩了。为什么没人要?我来告诉你答案。 然后我还会结合我的这些年的…...
快看!这只猫两次登上 Github Trending !!!
前几天我在逛 Github Trending,无意间发现这个Postcat 登上榜单 !好奇心驱使我去了解这个 Postcat。近期它上新了几个有意思的插件,其中 ChatGPT 插件,用户可以直接省去复杂的流程,直接体验 ChatGPT,懂的都懂ÿ…...

Linux->文件系统初识
目录 前言: 1 认识文件 2 文件使用 2.1 文件加载 2.2 外设文件使用 3 文件接口和文件描述符 3.1 文件系统调用接口 open: 3.2 文件描述符 4 缓冲区 前言: 在大家看这篇文章之前,我得提出几个问题: 1. 我们有多…...

InfluxDB和IotDB介绍与性能对比
InfluxDB简介 InfluxDB 是用Go语言编写的一个开源分布式时序、事件和指标数据库,无需外部依赖。用于存储和分析时间序列数据的开源数据库。 适合存储设备性能、日志、物联网传感器等带时间戳的数据,其设计目标是实现分布式和水平伸缩扩展。 InfluxDB 包括用于存储和…...

计算机体系结构(校验码+总线)
校验码计算机系统运行时,为了确保数据在传送过程中正确无误,一是提高硬件电路的可靠性;二就是是提高代码的校验能力,包括查错和纠错。通常使用校验码的方法检测传送的数据是否出错。这里的校验码主要是指循环冗余校验码࿰…...

从开发到上线:在快马平台部署一个可商用的旗博士口播智能体
最近在做一个电商直播相关的项目,需要快速搭建一个智能口播文案生成工具。经过一番摸索,我发现用InsCode(快马)平台可以非常高效地完成从开发到上线的全流程。下面分享下我的实战经验。 项目需求分析 这个旗博士口播智能体主要面向直播运营人员ÿ…...
)
NXP S32K3开发日记:PIT0的RTI唤醒功能调试全记录(含时钟源配置误区)
NXP S32K3开发实战:PIT0 RTI唤醒功能深度解析与排错指南 作为一名长期深耕汽车电子领域的嵌入式工程师,最近在基于NXP S32K3系列MCU开发低功耗应用时,遇到了一个颇具挑战性的问题——如何可靠地使用PIT0的RTI(Real Time Interrupt…...

Java外部函数接口不是“能用就行”——从内存泄漏、线程崩溃到ABI不兼容,这9类致命缺陷正在 silently 摧毁你的微服务
第一章:Java外部函数接口(JEP 454)核心原理与演进脉络Java外部函数接口(Foreign Function & Memory API,JEP 454)标志着Java平台原生互操作能力的根本性重构。它取代了长期受限且易出错的JNI࿰…...

实战指南 — 基于TCGA数据的差异表达分析全流程与可视化呈现
1. TCGA数据获取与准备 第一次接触TCGA数据库时,我被它庞大的数据量震撼到了。作为癌症基因组图谱计划,TCGA收录了33种癌症类型、超过2万例患者的基因组数据。对于肝癌(LIHC)研究来说,这里简直就是一座金矿。 进入TCGA官网后,你会…...

解锁5大跨平台无线控制能力:QtScrcpy全方位使用指南
解锁5大跨平台无线控制能力:QtScrcpy全方位使用指南 【免费下载链接】QtScrcpy Android实时投屏软件,此应用程序提供USB(或通过TCP/IP)连接的Android设备的显示和控制。它不需要任何root访问权限 项目地址: https://gitcode.com/barry-ran/QtScrcpy …...
)
SPM12实战:手把手教你搞定fMRI数据预处理(从时间矫正到空间平滑)
SPM12实战:零基础入门fMRI数据预处理全流程解析 第一次接触功能磁共振成像(fMRI)数据分析时,面对SPM12复杂的界面和晦涩的术语,很多新手都会感到无从下手。这篇文章将带你从零开始,用最直观的方式掌握fMRI数…...

智能提取B站字幕:告别手动抄录的高效开源工具
智能提取B站字幕:告别手动抄录的高效开源工具 【免费下载链接】BiliBiliCCSubtitle 一个用于下载B站(哔哩哔哩)CC字幕及转换的工具; 项目地址: https://gitcode.com/gh_mirrors/bi/BiliBiliCCSubtitle 还在为手动记录B站视频字幕而烦恼?BiliBiliC…...

DeepSeek-Coder-V2本地化部署指南:构建你的专属AI编程助手
DeepSeek-Coder-V2本地化部署指南:构建你的专属AI编程助手 【免费下载链接】DeepSeek-Coder-V2 DeepSeek-Coder-V2: Breaking the Barrier of Closed-Source Models in Code Intelligence 项目地址: https://gitcode.com/GitHub_Trending/de/DeepSeek-Coder-V2 …...

Univer全栈框架实战指南:3步构建企业级AI原生表格应用
Univer全栈框架实战指南:3步构建企业级AI原生表格应用 【免费下载链接】univer Build AI-native spreadsheets. Univer is a full-stack framework for creating and editing spreadsheets on both web and server. With Univer Platform, Univer Spreadsheets is d…...

OpenSSL实战:从零构建私有CA体系及多级证书签发指南
1. 为什么需要私有CA体系? 在日常开发中,我们经常遇到需要HTTPS加密通信的场景。比如微服务之间的API调用、内部系统的数据传输、物联网设备的安全连接等。虽然可以使用公共CA机构颁发的证书,但在以下场景中,自建CA体系会更加灵活…...