ORB-SLAM2运行环境搭建

操作系统:Ubuntu20.04
1.安装Eigen3
推荐大家安装版本 3.2.10
链接:https://eigen.tuxfamily.org/index.php?title=Main_Page

mkdir build
cd build
cmake ..
sudo make install
2.安装Pangolin
推荐安装0.5版本
链接:https://github.com/stevenlovegrove/Pangolin/releases/tag/v0.5
先安装两个必要依赖:
sudo apt install pkg-config python3-pip
sudo apt install libglew-dev
推荐依赖:python2、用于python和C++互相调用所需的库pybind11、图形库Pillow等其他python模块、Linux 新型显示服务架构Wayland
sudo apt install libpython2.7-dev
git submodule init && git submodule update
sudo python -mpip install numpy pyopengl Pillow pybind11
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
3.安装ceres-solver
推荐安装2.2.0
链接:https://github.com/ceres-solver/ceres-solver/tags

4.安装opencv3
推荐安装3.4.16版本
地址:https://opencv.org/releases/

下载完成后,将其提取到主目录。将该文件夹重命名为opencv3。
(1)安装依赖环境
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
(2)编译
cd opencv3
mkdir build
cd build
sudo cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
sudo make -j4

(3)安装
sudo make install

(4)环境配置
修改ld.so.conf文件
用gedit打开/etc/ld.so.conf
在文件中加上一行 /usr/loacal/lib
其中/user/loacal是opencv安装路径也就是makefile中指定的安装路径
sudo gedit /etc/ld.so.conf

(5)运行下面语句刷新库链接配置
sudo ldconfig
(6)修改bash.bashrc文件
终端执行:
sudo gedit /etc/bash.bashrc
在文件末尾加入:
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH

(6)刷新配置文件
source /etc/bash.bashrc
(7)检查是否安装成功
pkg-config opencv --modversion

1.opencv 出问题解决
Rebuild the library with Windows, GTK+ 2.x or Carbon support. If you are on Ubuntu or Debian, install libgtk2.0-dev and pkg-config, then re-run cmake or configure script in function 'cvNamedWindow'
如何解决链接:https://blog.csdn.net/Zoey_chn/article/details/137687229
5.安装g2o
链接:https://github.com/RainerKuemmerle/g2o
mkdir build && cd build
cmake ..
make
sudo make install
6.安装 DBoW3
7.安装ORB_SLAM 2
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
cd ORB_SLAM2
chmod +x build.sh
./build.sh
安装遇到的常见问题及解决方法
https://blog.csdn.net/wakeup_high/article/details/138011781?spm=1001.2014.3001.5502
8.运行ORB-SLAM2
1.单目
KITTI数据集
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTI00-02.yaml /home/wm/Downloads/slam_data/KITTI/sequences/00/
TUM 数据集
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml /home/wm/Downloads/slam_data/rgbd_dataset_freiburg1_xyz2双目
KITTI数据集
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTI00-02.yaml /home/wm/Downloads/slam_data/KITTI/sequences/00/
3.RGB-D
TUM数据集
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml /home/wm/Downloads/slam_data/rgbd_dataset_freiburg1_xyz /home/wm/Downloads/ORB_SLAM2/Examples/RGB-D/associations/fr1_desk.txt
相关文章:
ORB-SLAM2运行环境搭建
操作系统:Ubuntu20.04 1.安装Eigen3 推荐大家安装版本 3.2.10 链接:https://eigen.tuxfamily.org/index.php?titleMain_Page mkdir build cd build cmake .. sudo make install2.安装Pangolin 推荐安装0.5版本 链接:https://github.com…...

Nginx高频核心面试题2
目录 高级问题1. **Nginx中如何实现URL重写?**2. **如何在Nginx中设置基本的HTTP身份验证?**3. **如何限制Nginx中的请求速率?**4. **如何在Nginx中设置自定义错误页面?**5. **Nginx的worker_processes和worker_connections参数有…...

全面提升PDF编辑效率,2024年五大顶级PDF编辑器推荐!
在这个数字化飞速发展的时代,PDF文件已经成为我们日常工作和学习中不可或缺的一部分。然而,面对PDF文件的编辑和管理,许多人仍然感到困惑和无助。今天,就让我们一起探索几款高效、易用的PDF编辑器,它们将彻底改变你的工…...

代码随想录算法训练营第二十天|235. 二叉搜索树的最近公共祖先 701.二叉搜索树中的插入操作 450.删除二叉搜索树中的节点
写在前边的话 235. 二叉搜索树的最近公共祖先 题目链接 力扣题目链接 题目难度 中等 看到题目的第一想法 看到题目的第一想法,除了昨天做过的普通二叉树的最近祖先的解法利用回溯从底向上搜索,我会想到使用迭代法,但我好像不太会使用到二…...

视频美颜SDK与直播美颜插件在实时视频中的应用
视频美颜技术作为提升视频质量的重要手段,已经成为了许多视频和直播应用中不可或缺的一部分。本篇文章,笔者将探讨视频美颜SDK与直播美颜插件在实时视频中的应用,并分析其在用户体验和技术实现方面的重要性。 一、视频美颜SDK的应用场景 视…...

【Linux】yum(工具篇)
文章目录 前言:什么是软件包yum 的介绍yum源yum源的配置第三方源的配置官方源的配置镜像站点安装wget包备份本地yum源配置网易yum源重新生成yum缓存 前言:什么是软件包 在Linux下安装软件, 一个通常的办法是下载到程序的源代码, 并进行编译, 得到可执行程…...

3GPP入门
官网地址 3GPP – The Mobile Broadband Standard 协议下载链接 Directory Listing /ftp/specs/archive 总纲 重点series Signalling protocols ("stage 3") - user equipment to network24 series信令Radio aspects25 series3G 基础LTE (Evolved UTRA), LTE-Adva…...
FFmpeg内存对齐简述
目录 引文 行字节数的计算 ffmpeg中的align ffmpeg中的linesize 内容参考 引文 在ffmpeg的使用过程中有时会发现align这个参数,那么这个参数代表什么意思,不同的值会产生什么影响呢,详见下文。 行字节数的计算 理解内存对齐之前首先要…...
)
手机号码归属地查询接口如何对接?(一)
一、什么是手机号码归属地接口? 通过手机号查询归属地信息、是否虚拟运营商等。 二、手机号码归属地接口适用哪些场景? 例如:市场营销领域 (1)精准营销:企业可以通过手机号归属地查询接口了解客户的大致…...

DDei在线设计器-加载数据
加载数据 本示例演示了怎样加载已有的JSON到设计器中。 如需了解详细的API教程以及参数说明,请参考DDei文档 外部数据JSON demo.vue <script setup lang"ts"> import DDeiEditorView from "ddei-editor"; import { DDeiCoreStandLayou…...
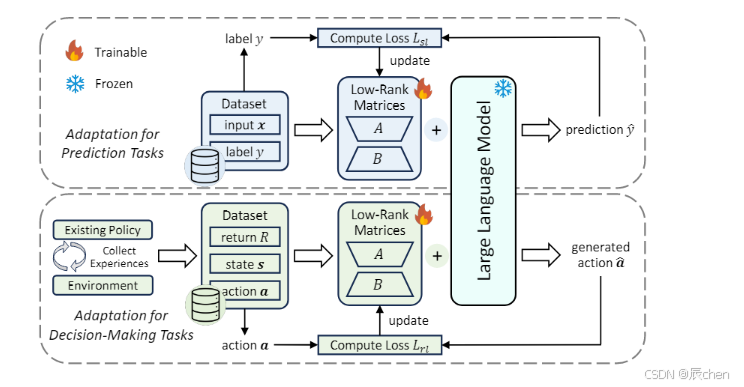
NetLLM: Adapting Large Language Models for Networking.
目录 NetLLM: Adapting Large Language Models for Networking.GlossaryNotesINTRODUCTIONThe Main Roadmap so farNew Opportunities and ChallengesDesign and Contributions BACKGROUNDLearning-Based Networking AlgorithmsLarge Language Models MOTIVATIONNETLLM DESIGNM…...

基于Yolov8面部七种表情检测与识别C++模型部署
表情识别 七种表情识别是一个多学科交叉的研究领域,它结合了心理学、认知科学、计算机视觉和机器学习等学科的知识和技术。 基本概念 表情的定义:表情是人们在情绪体验时面部肌肉活动的结果,是人类情感交流的基本方式之一。基本表情理论&a…...

未确认融资费用含义及会计处理流程
文章目录 一、含义二、会计处理流程2.1、初始计量2.2、后续计量2.3、报表列式 三、实务中的注意事项 一、含义 未确认融资费用: 由于企业现有资金不足,购买资产时选择分期支付款项,导致实际支付的款项大于资产的购入价值,两者的差额就是由于…...

Linux配置go程序为service后台开机自启动
1.编写需要启动的项目路径以及简单配置 sudo nano /etc/systemd/system/go.service#定义服务的元数据和依赖关系。 [Unit] #这是对服务的简短描述。 DescriptionMy Go Service #network.target 是一个虚拟目标,它表示网络服务已经初始化完成。该指令告诉 systemd 在…...

汇舟问卷:完成16份调查,挣了40美金,换算后美滋滋
这个世界有太多的人30岁,35岁以后,当初没有去做自己想做的工作,没有花时间去坚持想做的工作,他们在选择这份想做的事业的前提被自己的父母朋友爱人阻断了。 他们告诉你,要努力的做好现在的工作,争取升职…...

Nacos 202407月RCE漏洞(0day)与复现
免责声明:请勿利用文章内的相关技术从事非法测试,由于传播、利用此文所提供的信息或者工具而造成的任何直接或者间接的后果及损失,均由使用者本人负责,所产生的一切不良后果与文章作者无关。该文章仅供学习用途使用。 一、背景与…...
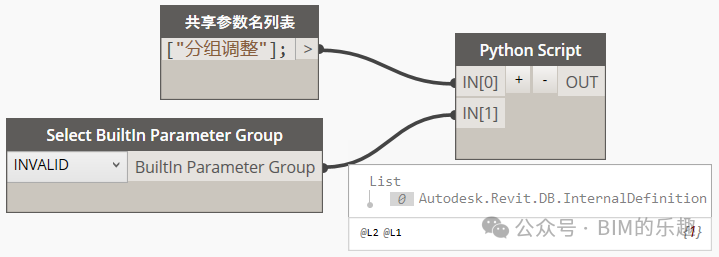
Dynamo修改共享参数绑定的分组——群问题整理005
Hello大家好!我是九哥~ 今天继续给大家分享一些短平快的小教程,是来自群里面的问题。 问题005:Dynamo修改共享参数绑定的分组 今天看到群里询问如何修改参数所在的分组,查了下API,项目参数是不行的,不过共享参数是允许ReInsert()的,那么就好办了。 然后在Document下…...

聚焦汽车软件开发与测试:静态代码扫描、单元测试与集成测试等方面的实践应用
2024年7月18-19日,龙智携汽车软件开发及管理解决方案创新亮相2024 ATC汽车软件与安全技术周。龙智技术支持部负责人&Atlassian认证专家叶燕秀、龙智功能安全高级工程师景玉鑫在活动主会场联合发表了精彩演讲,分享推动汽车软件开发与功能安全的创新实…...

「队列」实现FIFO队列(先进先出队列|queue)的功能 / 手撕数据结构(C++)
概述 队列,是一种基本的数据结构,也是一种数据适配器。它在底层上以链表方法实现。 队列的显著特点是他的添加元素与删除元素操作:先加入的元素总是被先弹出。 一个队列应该应该是这样的: --------------QUEUE-------------——…...

C++ STL中 `set` 和 `multiset` 简单对比
在 C STL 中,set 和 multiset 都是用于存储唯一或重复元素的关联容器,但它们在处理元素的唯一性和特性方面有显著的区别。以下是这两个容器的详细比较: 1. 数据结构 set:基于红黑树(自平衡的二叉搜索树)实…...

PostgreSQL CASE语句深度解析:性能、类型与NULL安全实战指南
1. 为什么你必须真正吃透 PostgreSQL 的 CASE 语句——它远不止是 SQL 里的“if-else”翻译器在 PostgreSQL 实战中,我见过太多人把CASE当成一个语法糖:写几个WHEN...THEN,加个ELSE,再套个END,就以为搞定了。结果呢&am…...

Hirschmann RS20-0800M4M4SDAE工业以太网交换机
Hirschmann RS20-0800M4M4SDAE 工业以太网交换机产品特点:端口配置:共8个端口,含6个RJ45电口和2个ST光纤接口。端口速率:所有端口均为100Mbps快速以太网。光纤类型:2个光纤端口为多模、ST接头。管理类型:二…...

OpenClaw 连接阿里云百炼图文教程
OpenClaw 连接阿里云百炼图文教程 前置准备 已安装并可以正常打开 OpenClaw Windows。 OpenClaw 顶部 Gateway 状态保持在线。 已准备好可正常登录的阿里云账号。 可以正常访问阿里云百炼登录地址:https://bailian.console.aliyun.com/cn-beijing#/home 建议提…...

写论文的神助攻!好用的AI写作辅助软件,逻辑清晰质量高
作为一名刚完成毕业论文的过来人,我太懂写论文的痛苦了 —— 选题迷茫、文献浩如烟海、框架混乱、逻辑不清、反复修改、查重降重反复折腾... 直到我发现了这套 AI 写作工具组合,简直是论文写作的 "开挂神器",效率直接拉满ÿ…...

Unity Visual Scripting不是拖拽玩具:中阶开发者的编程范式重构指南
1. 为什么Unity官方Visual Scripting不是“拖拽完就能跑”的玩具,而是一套需要重新理解的编程范式很多人第一次点开Unity的Visual Scripting(VS)面板时,看到那些五颜六色的节点和丝滑的连线,下意识觉得:“这…...

FairyGUI Unity鼠标悬停与点击对象获取原理与实战
1. 这不是“加个OnMouseEnter就能用”的事:FairyGUI在Unity中处理鼠标交互的真实困境很多人第一次在Unity里集成FairyGUI,想实现“鼠标悬停显示提示”或“点击高亮当前按钮”,下意识就去翻Unity的MonoBehaviour文档,找OnMouseEnte…...

Vue2-Verify:解决前端验证码安全性与用户体验平衡问题的技术方案实现
Vue2-Verify:解决前端验证码安全性与用户体验平衡问题的技术方案实现 【免费下载链接】vue2-verify vue的验证码插件 项目地址: https://gitcode.com/gh_mirrors/vu/vue2-verify 在当今Web应用开发中,验证码作为防止自动化攻击的关键安全组件&…...

3步快速部署:智能茅台抢购平台的终极自动化解决方案
3步快速部署:智能茅台抢购平台的终极自动化解决方案 【免费下载链接】campus-imaotai i茅台app自动预约,每日自动预约,支持docker一键部署(本项目不提供成品,使用的是已淘汰的算法) 项目地址: https://gi…...

5步彻底解决Windows DLL加载冲突:UE4SS系统故障排查指南
5步彻底解决Windows DLL加载冲突:UE4SS系统故障排查指南 【免费下载链接】RE-UE4SS Injectable LUA scripting system, SDK generator, live property editor and other dumping utilities for UE4/5 games 项目地址: https://gitcode.com/gh_mirrors/re/RE-UE4SS…...

Avidemux视频编辑工具终极指南:5个简单步骤快速上手专业剪辑
Avidemux视频编辑工具终极指南:5个简单步骤快速上手专业剪辑 【免费下载链接】avidemux2 Avidemux2, simple video editor 项目地址: https://gitcode.com/gh_mirrors/avi/avidemux2 你是否曾经因为复杂的视频编辑软件而头疼?想要一个免费、开源且…...