【网络】网络编程套接字(二)
文章目录
- 1.单执行流的TCP网络程序
- 1.1服务端创建套接字
- 1.2服务端绑定
- 1.3服务端监听
- 1.4服务端获取链接
- 1.5服务端处理请求
- 1.6客户端创建套接字
- 1.7客户端连接服务器
- 1.8客户端发起请求
- 2.多进程版的TCP网络程序
- 2.1单执行流的弊端
- 2.2多进程版的TCP网络程序
- 3.多线程版的TCP网络程序
- 3.1多进程版的弊端
- 3.2多线程版的TCP网络程序
- 4.线程池版的TCP网络程序
- 4.1多线程版的弊端
- 4.2线程池版的TCP网络程序
1.单执行流的TCP网络程序
1.1服务端创建套接字
我们将TCP服务器封装成一个类,当我们定义出一个服务器对象后需要马上对服务器进行初始化,而初始化TCP服务器要做的第一件事就是创建套接字。
TCP服务器在调用socket函数创建套接字时,参数设置如下:
- 协议家族选择
AF_INET,因为我们要进行的是网络通信。 - 创建套接字时所需的服务类型应该是
SOCK_STREAM,因为我们编写的是TCP服务器,SOCK_STREAM提供的就是一个有序的、可靠的、全双工的、基于连接的流式服务。 - 协议类型默认设置为0即可。
如果创建套接字后获得的文件描述符是小于0的,说明套接字创建失败,此时也就没必要进行后续操作了,直接终止程序即可。
class TcpServer
{public:void InitServer(){// 1. 创建流式套接字_sock = ::socket(AF_INET, SOCK_STREAM, 0);if (_sock < 0){LOG(FATAL, "socket error");exit(SOCKET_ERROR);}LOG(DEBUG, "socket create success,sockfd is : %d", _sock);}~TcpServer(){if (_sock >= 0){close(_sock);}}private:int _sock; //套接字
};
1.2服务端绑定
套接字创建完成,此时的_sock只是一个文件描述符,并未与网络进行关联,所以我们需要调用bind函数将该套接字绑定对应的协议家族、IP和PORT等信息。
而协议家族、IP和PORT信息存放在struct sockaddr_in这样的结构体中,所以我们需要创建一个该结构体,并将对应的数据进行填充。
class TcpServer
{public:TcpServer(int port) : _sock(-1), _port(port){}void InitServer(){// 1. 创建流式套接字_sock = ::socket(AF_INET, SOCK_STREAM, 0);if (_sock < 0){LOG(FATAL, "socket error");exit(SOCKET_ERROR);}LOG(DEBUG, "socket create success,sockfd is : %d", _sock);// 2. 绑定struct sockaddr_in local; // struct sockaddr_in 系统提供的数据类型。local是变量,用户栈上开辟空间。bzero(&local, sizeof(local)); // 将从&local开始的sizeof(local)大小的内存区域置零local.sin_family = AF_INET; // 设置网络通信方式local.sin_port = htons(_port); // port要经过网络传输给对面,所有需要从主机序列转换为网络序列local.sin_addr.s_addr = INADDR_ANY;int n = bind(_sock, (struct sockaddr *)&local, sizeof(local));if (n < 0){LOG(FATAL, "bind error");exit(BIND_ERROR);}LOG(DEBUG, "bind success,sockfd is : %d", _sock);}~TcpServer(){if (_sock >= 0){close(_sock);}}private:int _sock; //监听套接字uint16_t _port; //端口号
};
具体细节在网络变成套接字(一)已经讲解过,这里就不重复了。
以上过程TcpServer与UdpServer唯一的区别就在于创建套接字时TcpServer是字节流式SOCK_STREAM,而UdpServer是数据报式SOCK_DGRAM。
1.3服务端监听
UDP服务器的初始化操作只有两步,第一步就是创建套接字,第二步就是绑定。
而TCP服务器是面向连接的,客户端在正式向TCP服务器发送数据之前,需要先与TCP服务器建立连接,然后才能与服务器进行通信。
因此TCP服务器需要时刻注意是否有客户端发来连接请求,此时就需要将TCP服务器创建的套接字设置为监听状态。
int listen(int sockfd, int backlog);
参数说明:
sockfd:需要设置为监听状态的套接字对应的文件描述符。backlog:全连接队列的最大长度。如果有多个客户端同时发来连接请求,此时未被服务器处理的连接就会放入连接队列,该参数代表的就是这个全连接队列的最大长度,一般不要设置太大,设置为5或10即可。
返回值说明:
- 监听成功返回0,监听失败返回-1,同时错误码会被设置。
const static int gbacklog = 5;
class TcpServer
{public:TcpServer(int port) : _listensockfd(-1), _port(port){}void InitServer(){// 1. 创建流式套接字_listensockfd = ::socket(AF_INET, SOCK_STREAM, 0);if (_listensockfd < 0){LOG(FATAL, "socket error");exit(SOCKET_ERROR);}LOG(DEBUG, "socket create success,sockfd is : %d", _listensockfd);// 2. 绑定struct sockaddr_in local; // struct sockaddr_in 系统提供的数据类型。local是变量,用户栈上开辟空间。bzero(&local, sizeof(local)); // 将从&local开始的sizeof(local)大小的内存区域置零local.sin_family = AF_INET; // 设置网络通信方式local.sin_port = htons(_port); // port要经过网络传输给对面,所有需要从主机序列转换为网络序列local.sin_addr.s_addr = INADDR_ANY;int n = bind(_listensock, (struct sockaddr *)&local, sizeof(local));if (n < 0){LOG(FATAL, "bind error");exit(BIND_ERROR);}LOG(DEBUG, "bind success,sockfd is : %d", _listensockfd);// 3. tcp是面向连接的,所以通信之前,必须先建立连接,服务器是被链接的// tcpserver启动,未来首先要一直等待客户端的连接,listenn = listen(_listensockfd, gbacklog);if (n < 0){LOG(FATAL, "listen error");exit(LISTEN_ERROR);}LOG(DEBUG, "listen success,sockfd is : %d", _listensockfd);}~TcpServer(){if (_listensockfd >= 0){close(_listensockfd);}}private:int _listensockfd; //监听套接字uint16_t _port; //端口号
};
初始化TCP服务器时创建的套接字并不是普通的套接字,而应该叫做监听套接字。为了表明寓意,我们将代码中套接字的名字由_sock改为_listensockfd。
在初始化TCP服务器时,只有创建套接字成功、绑定成功、监听成功,此时TCP服务器的初始化才算完成。
1.4服务端获取链接
TCP服务器初始化后就可以开始运行了,但TCP服务器在与客户端进行网络通信之前,服务器需要先获取到客户端的连接请求。
int accept(int sockfd, struct sockaddr *addr, socklen_t *addrlen);
参数说明:
sockfd:特定的监听套接字,表示从该监听套接字中获取连接。addr:对端网络相关的属性信息,包括协议家族、IP地址、端口号等。addrlen:调用时传入期望读取的addr结构体的长度,返回时代表实际读取到的addr结构体的长度,这是一个输入输出型参数。
返回值说明:
- 获取连接成功返回接收到的套接字的文件描述符,获取连接失败返回-1,同时错误码会被设置。
注意:我们发现accept函数返回的也是套接字的文件描述符,那么监听套接字和该套接字的区别在哪呢?
调用accept函数获取连接时,是从监听套接字当中获取的。如果accept函数获取连接成功,此时会返回接收到的套接字对应的文件描述符。
监听套接字与accept函数返回的套接字的作用:
- 监听套接字:用于获取客户端发来的连接请求。accept函数会不断从监听套接字当中获取新连接。
- accept函数返回的套接字:用于为本次accept获取到的连接提供服务。监听套接字的任务只是不断获取新连接,而真正为这些连接提供服务的套接字是accept函数返回的套接字,而不是监听套接字。
accept函数获取连接时可能会失败,但TCP服务器不会因为获取某个连接失败而退出,因此服务端获取连接失败后应该继续获取连接。
void Loop()
{_isrunning = true;// 4. 不能直接接收数据,先获取连接while (_isrunning){struct sockaddr_in peer;socklen_t len = sizeof(peer);// accept会阻塞等待,直到有客户端连接int sockfd = ::accept(_listensockfd, (struct sockaddr *)&peer, &len);if (sockfd < 0){LOG(WARNING, "accept error");continue; // 失败了就继续获取就行,不需要退出};// 处理请求}_isrunning = false;
}
获取链接后,我们就可以拿着该套接字sockfd进行数据传输了。
1.5服务端处理请求
此时为客户端提供服务的不是监听套接字,因为监听套接字获取到一个连接后会继续获取下一个请求连接,为对应客户端提供服务的套接字实际是accept函数返回的套接字,即服务套接字。
为了让通信双方都能看到对应的现象,我们这里就实现一个简单的回声TCP服务器,服务端在为客户端提供服务时就简单的将客户端发来的数据进行输出,并且将客户端发来的数据重新发回给客户端即可。当客户端拿到服务端的响应数据后再将该数据进行打印输出,此时就能确保服务端和客户端能够正常通信了。
由于TCP面向字节流,所以通信接口我们可以使用read、write,或者使用recv、send。
ssize_t read(int fd, void *buf, size_t count);
参数说明:
fd:特定的文件描述符,表示从该文件描述符中读取数据。buf:数据的存储位置,表示将读取到的数据存储到该位置。count:数据的个数,表示从该文件描述符中读取数据的字节数。
返回值说明:
- 如果返回值大于0,则表示本次实际读取到的字节个数。
- 如果返回值等于0,则表示读到了文件结尾,即client退出&&关闭连接了。
- 如果返回值小于0,则表示读取时遇到了错误。
或者使用recv函数。
ssize_t recv(int sockfd, void *buf, size_t len, int flags);
参数说明:
sockfd:套接字描述符,表示要接收数据的套接字。buf:指向缓冲区的指针,接收到的数据将被存储在这个缓冲区中。len:缓冲区的大小,即最多可以接收多少字节的数据。flags:指定接收操作的行为,通常是0,但在某些情况下可以指定特殊的行为,如非阻塞模式。
返回值说明:
- 成功时,
recv返回接收到的字节数。如果连接正常关闭,且没有数据可读,则返回0。 - 失败时,返回-1,并设置相应的errno以指示错误原因。
当服务端调用read函数收到客户端的数据后,就可以再调用write函数将该数据再响应给客户端。
ssize_t write(int fd, const void *buf, size_t count);
参数说明:
fd:特定的文件描述符,表示将数据写入该文件描述符对应的套接字。buf:需要写入的数据。count:需要写入数据的字节个数。
返回值说明:
- 写入成功返回实际写入的字节数,写入失败返回-1,同时错误码会被设置。
或者使用send函数。
ssize_t send(int sockfd, const void *buf, size_t len, int flags);
参数说明:
sockfd:套接字描述符,表示要发送数据的套接字。buf:指向包含要发送数据的缓冲区的指针。len:要发送的字节数。flags:指定发送操作的行为,通常是0,但在某些情况下可以指定特殊的行为,如非阻塞模式。
返回值说明:
- 成功时,
send返回实际发送的字节数。这通常等于请求发送的字节数,但在某些情况下(如非阻塞套接字且缓冲区已满时),它可能小于请求发送的字节数。 - 失败时,返回-1,并设置相应的错误码errno以指示错误原因。
需要注意的是,服务端读取数据是服务套接字中读取的,而写入数据的时候也是写入进服务套接字的。也就是说这里为客户端提供服务的套接字,既可以读取数据也可以写入数据,这就是TCP全双工的通信的体现。
在从服务套接字中读取客户端发来的数据时,注意及时关闭服务套接字对应的文件描述符。因为文件描述符本质就是数组的下标,因此文件描述符的资源是有限的,如果我们一直占用,那么可用的文件描述符就会越来越少,因此服务完客户端后要及时关闭对应的文件描述符,否则会导致文件描述符泄漏。
void Service(int sockfd, InetAddr client)
{LOG(DEBUG, "get a new link ,info %s:%d,fd:%d", client.Ip(), client.Port(), sockfd);std::string clientaddr = "[" + client.Ip() + ":" + std::to_string(client.Port()) + "]#";while (true){// tcp连接面向字节流,可以使用文件接口:read,writechar inbuffer[1024];ssize_t n = read(sockfd, inbuffer, sizeof(inbuffer) - 1);if (n > 0){inbuffer[n] = 0;std::cout << clientaddr << inbuffer << std::endl;std::string echo_string = "[server echo]# ";echo_string += inbuffer;write(sockfd, echo_string.c_str(), echo_string.size());}else if (n == 0) // read返回值如果为0,表示读到了文件结尾,即client退出&&关闭连接了{LOG(INFO, "%s quit", clientaddr.c_str());break;}else{LOG(ERROR, "read error");break;}}close(sockfd); // 文件描述符泄露
}
void Loop()
{_isrunning = true;// 4. 不能直接接收数据,先获取连接while (_isrunning){struct sockaddr_in peer;socklen_t len = sizeof(peer);// accept会阻塞等待,直到有客户端连接int sockfd = ::accept(_listensockfd, (struct sockaddr *)&peer, &len);if (sockfd < 0){LOG(WARNING, "accept error");continue; // 失败了就继续获取就行,不需要退出};// version 0 :一次只能处理一个请求Service(sockfd, InetAddr(peer));}_isrunning = false;
}
1.6客户端创建套接字
简单些,我们这里不对客户端进行封装了。
上篇文章我们提到过:客户端是否需要绑定的问题:
客户端要不要绑定?
答案是肯定的,因为网络通信的前提就是需要客户端的IP和PORT,服务端的IP和PORT,通过他们两个网络中的进程才可以进行通信。但是客户端不能像服务端一样显式的bind,设想一个场景,淘宝写了一个客户端,显示绑定了端口号8080,而微信写的客户端也显示绑定的8080端口号,那此时就会因为端口冲突导致你只能使用一项服务,这很明显是不现实的,所以客户端绑定端口的操作由操作系统自动完成,就是为了防止客户端端口号冲突,一般在首次发送数据的时候绑定。
客户端必须要知道它要连接的服务端的IP地址和端口号,因此客户端除了要有自己的套接字之外,还需要知道服务端的IP地址和端口号,这样客户端才能够通过套接字向指定服务器进行通信。
void Usage(std::string proc)
{std::cout << "Usage:\n\t" << proc << " serverip serverport\n"<< std::endl;
}
// ./tcpclient serverip serverport
int main(int argc, char *argv[])
{if (argc != 3){Usage(argv[0]);exit(1);}std::string serverip = argv[1];uint16_t serverport = std::stoi(argv[2]);int sockfd = socket(AF_INET, SOCK_STREAM, 0);if (sockfd < 0){std::cerr << "socket error" << std::endl;exit(2);}close(sockfd);return 0;
}
1.7客户端连接服务器
客户端不需要显式绑定,也不需要监听,因此当客户端创建完套接字后就可以向服务端发起连接请求。
int connect(int sockfd, const struct sockaddr *addr, socklen_t addrlen);
参数说明:
sockfd:特定的套接字,表示通过该套接字发起连接请求。addr:对端网络相关的属性信息,包括协议家族、IP地址、端口号等。addrlen:传入的addr结构体的长度。
返回值说明:
- 连接或绑定成功返回0,连接失败返回-1,同时错误码会被设置。
需要注意的是,客户端不是不需要进行绑定,而是不需要我们自己进行绑定操作,当客户端向服务端发起连接请求时,系统会给客户端随机指定一个端口号进行绑定。因为通信双方都必须要有IP地址和端口号,否则无法唯一标识通信双方。也就是说,如果connect函数调用成功了,客户端本地会随机给该客户端绑定一个端口号发送给对端服务器。
此外,调用connect函数向服务端发起连接请求时,需要传入服务端对应的网络信息,否则connect函数也不知道该客户端到底是要向哪一个服务端发起连接请求。
void Usage(std::string proc)
{std::cout << "Usage:\n\t" << proc << " serverip serverport\n"<< std::endl;
}
// ./tcpclient serverip serverport
int main(int argc, char *argv[])
{if (argc != 3){Usage(argv[0]);exit(1);}std::string serverip = argv[1];uint16_t serverport = std::stoi(argv[2]);int sockfd = socket(AF_INET, SOCK_STREAM, 0);if (sockfd < 0){std::cerr << "socket error" << std::endl;exit(2);}// 构建目标主机的socket信息struct sockaddr_in server;memset(&server, 0, sizeof(server)); // bzeroserver.sin_family = AF_INET;server.sin_port = htons(serverport);server.sin_addr.s_addr = inet_addr(serverip.c_str());int n = connect(sockfd, (struct sockaddr *)&server, sizeof(server));if (n < 0){std::cerr << "connect error" << std::endl;exit(3);}close(sockfd);return 0;
}
1.8客户端发起请求
由于我们实现的是一个简单的回声服务器,因此当客户端连接到服务端后,客户端就可以向服务端发送数据了,这里我们可以让客户端将用户输入的数据发送给服务端,发送时调用send函数向套接字当中写入数据即可。
当客户端将数据发送给服务端后,由于服务端读取到数据后还会进行回显,因此客户端在发送数据后还需要调用recv函数读取服务端的响应数据,然后将该响应数据进行打印,以确定双方通信无误。
void Usage(std::string proc)
{std::cout << "Usage:\n\t" << proc << " serverip serverport\n"<< std::endl;
}
// ./tcpclient serverip serverport
int main(int argc, char *argv[])
{if (argc != 3){Usage(argv[0]);exit(1);}std::string serverip = argv[1];uint16_t serverport = std::stoi(argv[2]);int sockfd = socket(AF_INET, SOCK_STREAM, 0);if (sockfd < 0){std::cerr << "socket error" << std::endl;exit(2);}// 构建目标主机的socket信息struct sockaddr_in server;memset(&server, 0, sizeof(server)); // bzeroserver.sin_family = AF_INET;server.sin_port = htons(serverport);server.sin_addr.s_addr = inet_addr(serverip.c_str());int n = connect(sockfd, (struct sockaddr *)&server, sizeof(server));if (n < 0){std::cerr << "connect error" << std::endl;exit(3);}while (true){std::cout << "Please Enter# ";std::string outstring;std::getline(std::cin, outstring);ssize_t s = send(sockfd, outstring.c_str(), outstring.size(), 0); // writeif (s > 0){char inbuffer[1024];ssize_t m = recv(sockfd, inbuffer, sizeof(inbuffer) - 1, 0);if (m > 0){inbuffer[m] = 0;std::cout << inbuffer << std::endl;}elsebreak;}else{break;}}close(sockfd);return 0;
}
经过测试,服务正常运行。
2.多进程版的TCP网络程序
2.1单执行流的弊端
当我们仅用一个客户端连接服务端时,这一个客户端能够正常享受到服务端的服务。
但在这个客户端正在享受服务端的服务时,我们让另一个客户端也连接服务器,此时虽然在客户端显示连接是成功的,但这个客户端发送给服务端的消息既没有在服务端进行打印,服务端也没有将该数据回显给该客户端。
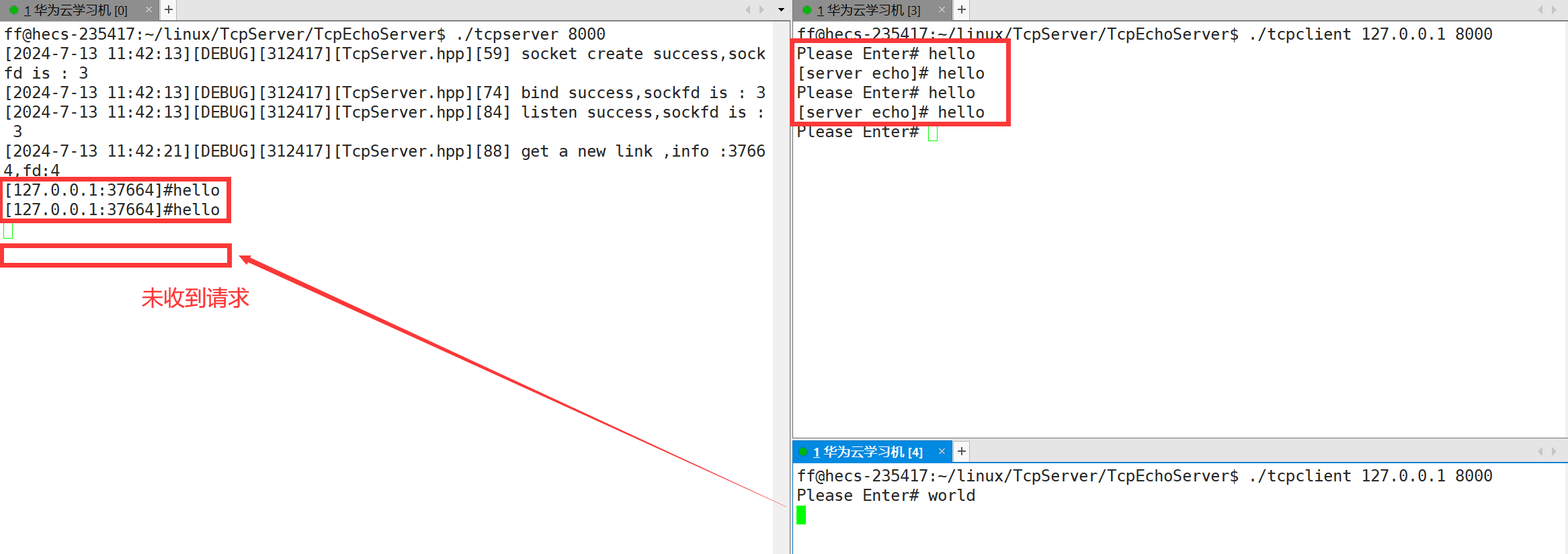
只有当第一个客户端退出后,服务端才会将第二个客户端发来是数据进行打印,并回显该第二个客户端。
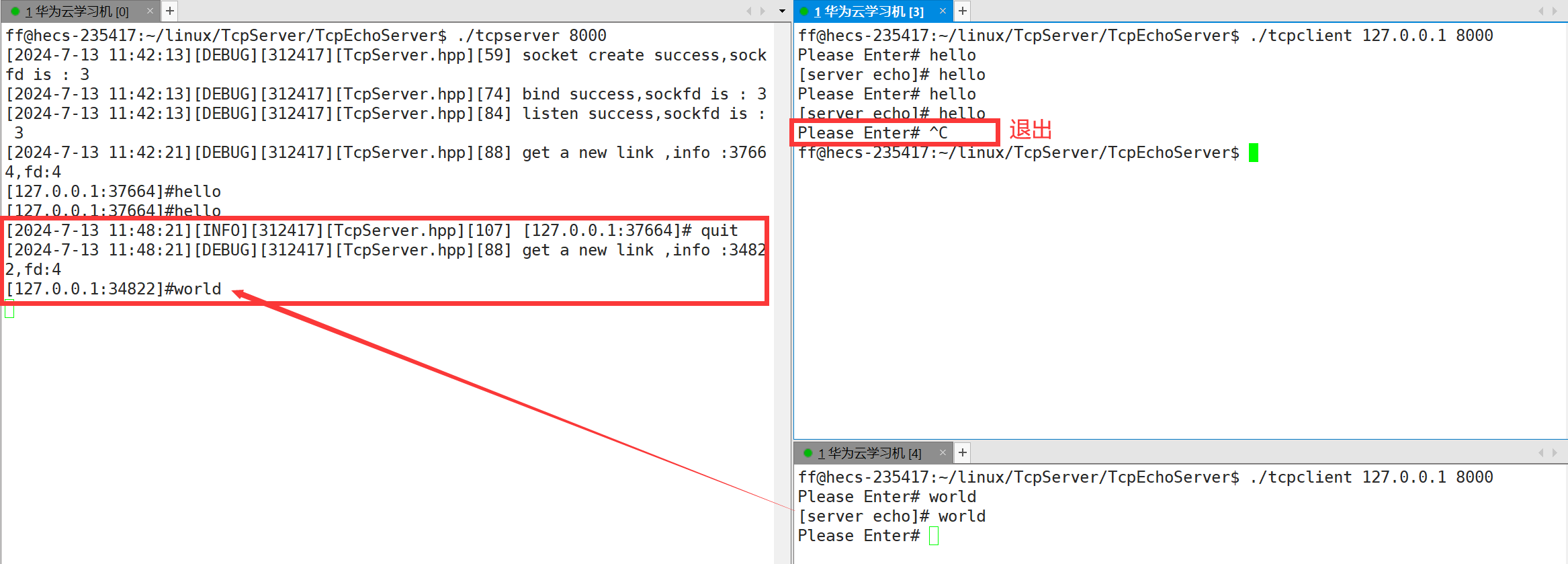
通过实验现象可以看到,这服务端只有服务完一个客户端后才会服务另一个客户端。因为我们目前所写的是一个单执行流版的服务器,这个服务器一次只能为一个客户端提供服务。
当服务端调用accept函数获取到连接后就给该客户端提供服务,但在服务端提供服务期间可能会有其他客户端发起连接请求,但由于当前服务器是单执行流的,只能服务完当前客户端后才能继续服务下一个客户端。
实际上当服务端在给第一个客户端提供服务期间,第二个客户端向服务端发起的连接请求时是成功的,只不过服务端没有调用accept函数将该连接获取上来罢了。
在底层会为我们维护一个连接队列,服务端没有accept的新连接就会放到这个连接队列当中,而这个连接队列的最大长度就是通过
listen函数的第二个gbacklog来指定的,因此服务端虽然没有获取第二个客户端发来的连接请求,但是在第二个客户端那里显示是连接成功的。
所以我们需要多执行流,即多进程 | 多线程。
2.2多进程版的TCP网络程序
当服务端调用accept函数获取到新连接后不是由当前执行流为该连接提供服务,而是当前执行流调用fork函数创建子进程,然后让子进程为父进程获取到的连接提供服务。
由于父子进程是两个不同的执行流,当父进程调用fork创建出子进程后,父进程就可以继续从监听套接字当中获取新连接,而不用关心获取上来的连接是否服务完毕。
需要注意的问题:
(1)有关套接字
当创建了子进程后,子进程继承父进程的文件描述符表,注意这个文件描述符表父子是独立拥有的,即父子进程现在都持有监听套接字对应的文件描述符_listensockfd和服务套接字sockfd。
那么此时我们建议:
- 在子进程中关闭监听套接字
_listensockfd,防止子进程误写_listensockfd。
要求:
- 在父进程中关闭服务套接字
sockfd,如果服务进程不及时关掉不用的文件描述符,最终服务进程中可用的文件描述符就会越来越少。
(2)有关等待子进程
当父进程创建出子进程后,父进程是需要等待子进程退出的,否则子进程会变成僵尸进程,进而造成内存泄漏。因此服务端创建子进程后需要调用wait或waitpid函数对子进程进行等待。
阻塞式等待与非阻塞式等待:
- 如果服务端采用阻塞的方式等待子进程,那么服务端还是需要等待服务完当前客户端,才能继续获取下一个连接请求,此时服务端仍然是以一种串行的方式为客户端提供服务。
- 如果服务端采用非阻塞的方式等待子进程,虽然在子进程为客户端提供服务期间服务端可以继续获取新连接,但此时服务端就需要将所有子进程的PID保存下来,并且需要不断花费时间检测子进程是否退出。
总之,服务端要等待子进程退出,无论采用阻塞式等待还是非阻塞式等待,都不尽人意。此时我们可以考虑让服务端不等待子进程退出。
不等待子进程退出的方式:
- 捕捉SIGCHLD信号,将其处理动作设置为忽略。
- 让父进程创建子进程,子进程再创建孙子进程,最后让孙子进程为客户端提供服务。
首先是捕捉SIGCHLD信号,将其处理动作设置为忽略。
当子进程退出时会给父进程发送SIGCHLD信号,如果父进程将SIGCHLD信号进行捕捉,并将该信号的处理动作设置为忽略,此时父进程就只需专心处理自己的工作,不必关心子进程了。
实现方式很简单,我们也推荐这样做:
void Loop()
{signal(SIGCHLD, SIG_IGN); //忽略SIGCHLD信号_isrunning = true;// 4. 不能直接接收数据,先获取连接while (_isrunning){struct sockaddr_in peer;socklen_t len = sizeof(peer);// accept会阻塞等待,直到有客户端连接int sockfd = ::accept(_listensockfd, (struct sockaddr *)&peer, &len);if (sockfd < 0){LOG(WARNING, "accept error");continue; // 失败了就继续获取就行,不需要退出};// version 1 :多进程版pid_t id = fork();if (id == 0){// child :关心sockfd,不关心listensockfdclose(_listensockfd); // 建议关闭,防止子进程误写_listensockfdService(sockfd, InetAddr(peer)); exit(0);}// father :关心listensockfd,不关心sockfd,因为父进程已经将sockfd交给了子进程close(sockfd);// 必须关闭,防止父进程打开过多的文件描述符而不关闭}_isrunning = false;
}
其次是让父进程创建子进程,子进程再创建孙子进程,最后让孙子进程为客户端提供服务。。
让孙子进程为客户端提供服务, 此时我们就不用等待孙子进程退出了。
我先将代码贴出来:
void Loop()
{signal(SIGCHLD, SIG_IGN); //忽略SIGCHLD信号_isrunning = true;// 4. 不能直接接收数据,先获取连接while (_isrunning){struct sockaddr_in peer;socklen_t len = sizeof(peer);// accept会阻塞等待,直到有客户端连接int sockfd = ::accept(_listensockfd, (struct sockaddr *)&peer, &len);if (sockfd < 0){LOG(WARNING, "accept error");continue; // 失败了就继续获取就行,不需要退出};// version 1 :采用多进程pid_t id = fork();if (id == 0){// child :关心sockfd,不关心listensockfdclose(_listensockfd); // 建议关闭,防止子进程误写_listensockfdif (fork() > 0)exit(0);// 子进程直接退出,留下孙子进程(孤儿),被系统领养,执行完service自动回收Service(sockfd, InetAddr(peer)); // Service由孙子进程执行exit(0);}// father :关心listensockfd,不关心sockfd,因为父进程已经将sockfd交给了子进程close(sockfd); // 必须关闭,防止父进程打开过多的文件描述符而不关闭waitpid(id, nullptr, 0); // 子进程直接退出,所以这里直接瞬间等待成功,所以可以继续accept}_isrunning = false;
}
在子进程中创建孙子进程,然后让孙子进程执行服务,子进程直接退出,此时孙子进程就变成了孤儿进程,会被系统领养,等待的问题也不需要我们考虑了。
3.多线程版的TCP网络程序
3.1多进程版的弊端
多进程版本的TCP网络程序在面对大量请求时也会显得力不从心,因为创建进程的成本是很高的,创建进程时需要创建该进程对应的进程控制块task_struct、进程地址空间mm_struct、页表等数据结构。
而创建线程的成本比创建进程的成本会小得多,因为线程本质是在进程地址空间内运行,创建出来的线程会共享该进程的大部分资源,因此在实现多执行流的服务器时最好采用多线程进行实现。
3.2多线程版的TCP网络程序
当服务进程调用accept函数获取到一个新连接后,就可以直接创建一个线程,让该线程为对应客户端提供服务。
当然,主线程(服务进程)创建出新线程后,也是需要等待新线程退出的,否则也会造成类似于僵尸进程这样的问题。但对于线程来说,如果不想让主线程等待新线程退出,可以让创建出来的新线程调用pthread_detach函数进行线程分离,当这个线程退出时系统会自动回收该线程所对应的资源。此时主线程(服务进程)就可以继续调用accept函数获取新连接,而让新线程去服务对应的客户端。
参数传递的问题:
新线程在为客户端提供服务时就是调用Service函数,而调用Service函数时是需要传入两个参数的,分别是客户端对应的套接字和InetAddr。因此主线程创建新线程时需要给新线程传入两个参数,但实际在调用pthread_create函数创建新线程时,只能传入一个类型为void*的参数。
所以根据我们之前学习线程创建的知识,我们一般是定义一个ThreadData结构体,用来存放需要传递给执行函数的参数。
当主线程创建新线程时就可以定义一个ThreadData对象,将客户端对应的套接字、InetAddr设计进这个ThreadData对象当中,然后将ThreadData对象的地址作为新线程执行例程的参数进行传入。
此时新线程在执行例程当中再将这个void*类型的参数强转为ThreadData*类型,然后就能够拿到客户端对应的套接字,InetAddr,进而调用Service函数为对应客户端提供服务。
注意:新线程的执行例程是一个参数为void*,返回值为void*的函数。但由于执行例程函数我们放在了类内,它隐藏的第一个参数为this指针,所以我们需要将线程例程函数HandlerSock设置为静态成员函数,即在函数前方加static 修饰,但是如果加static修饰后,就无法调用类内的Service函数了(因为没有this指针了),所以我们需要将this指针设为ThreadData的类内成员,再通过这个this调用Service,或者将Service也设置为静态成员函数。
class ThreadData
{public:ThreadData(int fd, InetAddr addr, TcpServer *s) : sockfd(fd), clientaddr(addr), self(s){}public:int sockfd;InetAddr clientaddr;TcpServer *self;
};class TcpServer
{public:TcpServer(int port) : _port(port), _listensockfd(sockfddefault), _isrunning(false){}void InitServer(){//略}void Service(int sockfd, InetAddr client){LOG(DEBUG, "get a new link ,info %s:%d,fd:%d", client.Ip(), client.Port(), sockfd);std::string clientaddr = "[" + client.Ip() + ":" + std::to_string(client.Port()) + "]#";while (true){// tcp连接面向字节流,可以使用文件接口:read,writechar inbuffer[1024];ssize_t n = read(sockfd, inbuffer, sizeof(inbuffer) - 1);if (n > 0){inbuffer[n] = 0;std::cout << clientaddr << inbuffer << std::endl;std::string echo_string = "[server echo]# ";echo_string += inbuffer;write(sockfd, echo_string.c_str(), echo_string.size());}else if (n == 0) // read返回值如果为0,表示读到了文件结尾,即client退出&&关闭连接了{LOG(INFO, "%s quit", clientaddr.c_str());break;}else{LOG(ERROR, "read error");break;}}close(sockfd); // 文件描述符泄露}static void *HandlerSock(void *args){pthread_detach(pthread_self()); // 线程分离ThreadData *td = static_cast<ThreadData *>(args);// 需要调用Service函数,但是Service函数是类内函数,静态成员函数没有this指针无法调用,如何解决?// 将this指针设为ThreadData的类内成员,再通过这个this调用Servicetd->self->Service(td->sockfd, td->clientaddr);delete td;return nullptr;}void Loop(){_isrunning = true;// 4. 不能直接接收数据,先获取连接while (_isrunning){struct sockaddr_in peer;socklen_t len = sizeof(peer);// accept会阻塞等待,直到有客户端连接int sockfd = ::accept(_listensockfd, (struct sockaddr *)&peer, &len);if (sockfd < 0){LOG(WARNING, "accept error");continue; // 失败了就继续获取就行,不需要退出};// version 2 :采用多线程pthread_t t;ThreadData *td = new ThreadData(sockfd, InetAddr(peer), this);pthread_create(&t, nullptr, HandlerSock, td);}_isrunning = false;}~TcpServer(){//略}private:uint16_t _port;int _listensockfd;bool _isrunning;
};
4.线程池版的TCP网络程序
4.1多线程版的弊端
每当有新连接到来时,服务端的主线程都会重新为该客户端创建为其提供服务的新线程,而当服务结束后又会将该新线程销毁。这样做不仅麻烦,而且效率低下,每当连接到来的时候服务端才创建对应提供服务的线程。
如果有大量的客户端连接请求,此时服务端要为每一个客户端创建对应的服务线程。计算机当中的线程越多,CPU的压力就越大,因为CPU要不断在这些线程之间来回切换,此时CPU在调度线程的时候,线程和线程之间切换的成本就会变得很高。
此外,一旦线程太多,每一个线程再次被调度的周期就变长了,而线程是为客户端提供服务的,线程被调度的周期变长,客户端也迟迟得不到应答。
所以为了解决以上问题,我们引入线程池,线程池的存在就是为了避免处理短时间任务时创建与销毁线程的代价,此外,线程池还能够保证内核充分利用,防止过分调度。
4.2线程池版的TCP网络程序
在线程池设计中我们维护了一个任务队列,并利用vector容器管理了多个线程,这些线程轮询查看任务队列中是否存在任务,并执行任务。
在TcpServer中我们只需要将Service作为任务入队到线程池的任务队列中即可。
所以我们使用bind将Service需要的参数绑定给Service构建一个无参无返回值的函数对象。入队时将该函数对象入队即可。
线程池代码:
using namespace ThreadModule;const static int DefaultThreadNum = 5;template <typename T>
class ThreadPool
{private:void LockQueue(){pthread_mutex_lock(&_mutex);}void UnlockQueue(){pthread_mutex_unlock(&_mutex);}void ThreadSleep(){pthread_cond_wait(&_cond, &_mutex);}void ThreadWake(){pthread_cond_signal(&_cond);}void ThreadWakeAll(){pthread_cond_broadcast(&_cond);}ThreadPool(int threadnum = DefaultThreadNum) : _threadnum(threadnum), _waitnum(0), _isrunning(false){pthread_mutex_init(&_mutex, nullptr);pthread_cond_init(&_cond, nullptr);LOG(INFO, "ThreadPool Construct()");}void initThreadPool(){for (int num = 0; num < _threadnum; num++){std::string name = "thread -" + std::to_string(num + 1);// _threads.emplace_back(Print, name)_threads.emplace_back(std::bind(&ThreadPool::HandlerTask, this, std::placeholders::_1), name); // 绑定LOG(INFO, "Init Thread %s done", name.c_str());}_isrunning = true;}void Start(){for (auto &thread : _threads){thread.Start();}}// 类的成员方法也可以成为另一个类(Thread)的回调方法void HandlerTask(std::string name) // 包含this指针{LOG(INFO, "Thread %s is running...", name.c_str());while (true){// 1.保证队列安全LockQueue();// 2.队列中不一定有数据while (_task_queue.empty() && _isrunning){_waitnum++;ThreadSleep();_waitnum--;}// 2.1如果任务队列为空并且线程池已经退出if (_task_queue.empty() && !_isrunning){UnlockQueue();break;}// 2.2如果任务队列非空并且线程池未退出// 2.3如果任务队列非空并且线程池已退出 --处理完任务再退出// 3.到这一定有任务,处理任务T t = _task_queue.front();_task_queue.pop();UnlockQueue();LOG(DEBUG, "%s get a task", name.c_str());// 4.处理任务,这个任务属于线程私有(独占)任务,所以不放到加锁解锁之间t();// LOG(DEBUG, "%s handler a task,result is %s", name.c_str(), t.ResultToString().c_str());}}// 禁止赋值拷贝ThreadPool(const ThreadPool<T> &) = delete;ThreadPool<T> &operator=(const ThreadPool<T> &) = delete;public:static ThreadPool<T> *GetInstance(){// 只有第一次会创建对象,后续都是获取// 双判断的方式,可以有效减少获取单例的加锁成本,而且保证线程安全if (_instance == nullptr){LockGuard lockguard(&_lock);if (_instance == nullptr){_instance = new ThreadPool<T>();_instance->initThreadPool();_instance->Start();LOG(DEBUG, "创建线程池实例");return _instance;}}LOG(DEBUG, "获取线程池实例");return _instance;}void Stop(){LockQueue();_isrunning = false;ThreadWakeAll();UnlockQueue();}void Wait(){for (auto &thread : _threads){thread.Join();LOG(INFO, "Thread %s is quit...", thread.name().c_str());}}bool Enqueue(const T &t){bool ret = false;LockQueue();if (_isrunning){_task_queue.push(t);if (_waitnum > 0){ThreadWake();}LOG(DEBUG, "enqueue task success");ret = true;}UnlockQueue();return ret;}~ThreadPool(){pthread_mutex_destroy(&_mutex);pthread_cond_destroy(&_cond);}private:int _threadnum;std::vector<Thread> _threads; // 管理线程std::queue<T> _task_queue; // 任务队列pthread_mutex_t _mutex;pthread_cond_t _cond;int _waitnum;bool _isrunning;// 添加单例模式static ThreadPool<T> *_instance;static pthread_mutex_t _lock;
};template <typename T>
ThreadPool<T> *ThreadPool<T>::_instance = nullptr;template <typename T>
pthread_mutex_t ThreadPool<T>::_lock = PTHREAD_MUTEX_INITIALIZER;
TcpServer代码:
using task_t = std::function<void()>;class TcpServer
{public:TcpServer(int port) : _port(port), _listensockfd(sockfddefault), _isrunning(false){}void InitServer(){//略}void Service(int sockfd, InetAddr client){//略}void Loop(){_isrunning = true;// 4. 不能直接接收数据,先获取连接while (_isrunning){struct sockaddr_in peer;socklen_t len = sizeof(peer);// accept会阻塞等待,直到有客户端连接int sockfd = ::accept(_listensockfd, (struct sockaddr *)&peer, &len);if (sockfd < 0){LOG(WARNING, "accept error");continue; // 失败了就继续获取就行,不需要退出};// version 3 : 采用线程池task_t t = std::bind(&TcpServer::Service, this, sockfd, InetAddr(peer));ThreadPool<task_t>::GetInstance()->Enqueue(t);}_isrunning = false;}~TcpServer(){//略}private:uint16_t _port;int _listensockfd;bool _isrunning;
};
选择多线程实现还是线程池实现,取决于具体的应用场景和需求。
对于需要处理大量并发连接但每个连接处理时间较短的场景,线程池通常是一个更好的选择。而对于连接数较少或每个连接处理时间较长的场景,直接使用多线程可能更简单直接。
路漫漫其修远兮,吾将上下而求索。 —屈原
相关文章:
【网络】网络编程套接字(二)
网络编程套接字(二) 文章目录 1.单执行流的TCP网络程序1.1服务端创建套接字1.2服务端绑定1.3服务端监听1.4服务端获取链接1.5服务端处理请求1.6客户端创建套接字1.7客户端连接服务器1.8客户端发起请求 2.多进程版的TCP网络程序2.1单执行流的弊端2.2多进…...
1.1、centos stream 9安装Kubernetes v1.30集群 环境说明
最近正在学习kubernetes,买了一套《Kubernetes权威指南 从Docker到Kubernetes实践全接触(第六版)》这本书讲得很好,上下两册,书中k8s的版本是V1.29,目前官网最新版本是v1.30。强烈建议大家买一套看看。 Kubernetes官网地址&#x…...

Redis3
目录 什么是缓存穿透?怎么解决? 什么是缓存雪崩?怎么解决? 如何保证数据库和缓存的数据一致性? 如何保证Redis服务高可用? 哨兵的作用 Redis虚拟槽分区有什么优点? 为什么Redis集群最大槽…...

Oracle数据巡检 - 设计巡检模板
设计巡检模板 明确巡检数据库等信息 包括数据库种类、版本、架构、数量等,例如 Oracle DG和Oracle RAC数据库巡检项肯定会有差异,Oracle 11g和12c版本巡检内容也会有所不同。 明确巡检项 这一块需要结合自身的运维经验,列出详尽的巡检项&…...

优盘未格式化数据恢复实战指南
在数字时代,优盘(USB闪存驱动器)作为便携存储媒介,承载着无数重要的文件与数据。然而,当您插入优盘准备访问资料时,却遭遇了“驱动器未被格式化”的提示,这无疑是一场突如其来的数据危机。本文将…...
)
【python基础】python基础习题练习(一)
文章目录 一. python语言简介二. python基本语法与常用函数三. python基本数据类型一.选择题二.编程题四. python组合数据类型一.选择题二.简答题三.编程题一. python语言简介 查看python是否安装成功的命令是:python -vPython IDE有:pyCharm、Spyder、Jupter NotebookPython…...

GESP 4级样题 ---> 绝对素数
这题需要判断一个数和它的反转后的数是否都为素数。 可以转成 string 后 reverse 一下。 AC CODE: #include <bits/stdc.h> using namespace std; typedef long long LL; bool isPrime(int x){if(x<2) return false;for(int i2;i*i<x;i){if(x%i0) re…...
大语言模型系列 - Transformer
1. 简介 1.1. 概述 大语言模型Transformer是一种由谷歌公司提出的基于注意力机制的神经网络模型,它在自然语言处理(NLP)领域取得了显著成就,并逐渐被应用于其他领域如语音识别、计算机视觉和强化学习等。 1.2. 学习资源 以下是一些学习大语言模型Transformer的资源地址…...

Java面试之操作系统
1、冯诺依曼模型 运算器、控制器、存储器、输入设备、输出设备 32位和64位CPU最主要区别是一次性能计算多少字节数据,如果计算的数额不超过 32 位数字的情况下,32 位和 64 位 CPU 之间没什么区别的,只有当计算超过 32 位数字的情况下&#…...
springboot船舶维保管理系统--论文源码调试讲解
第二章 相关技术 本次开发船舶维保管理系统使用的是Vue进行程序开发,船舶维保管理系统的数据信息选择MySQL数据库进行存放。 2.1 VUE介绍 Vue (读音 /vjuː/,类似于 view) 是一套用于构建用户界面的渐进式框架。与其它大型框架不同的是,Vue…...
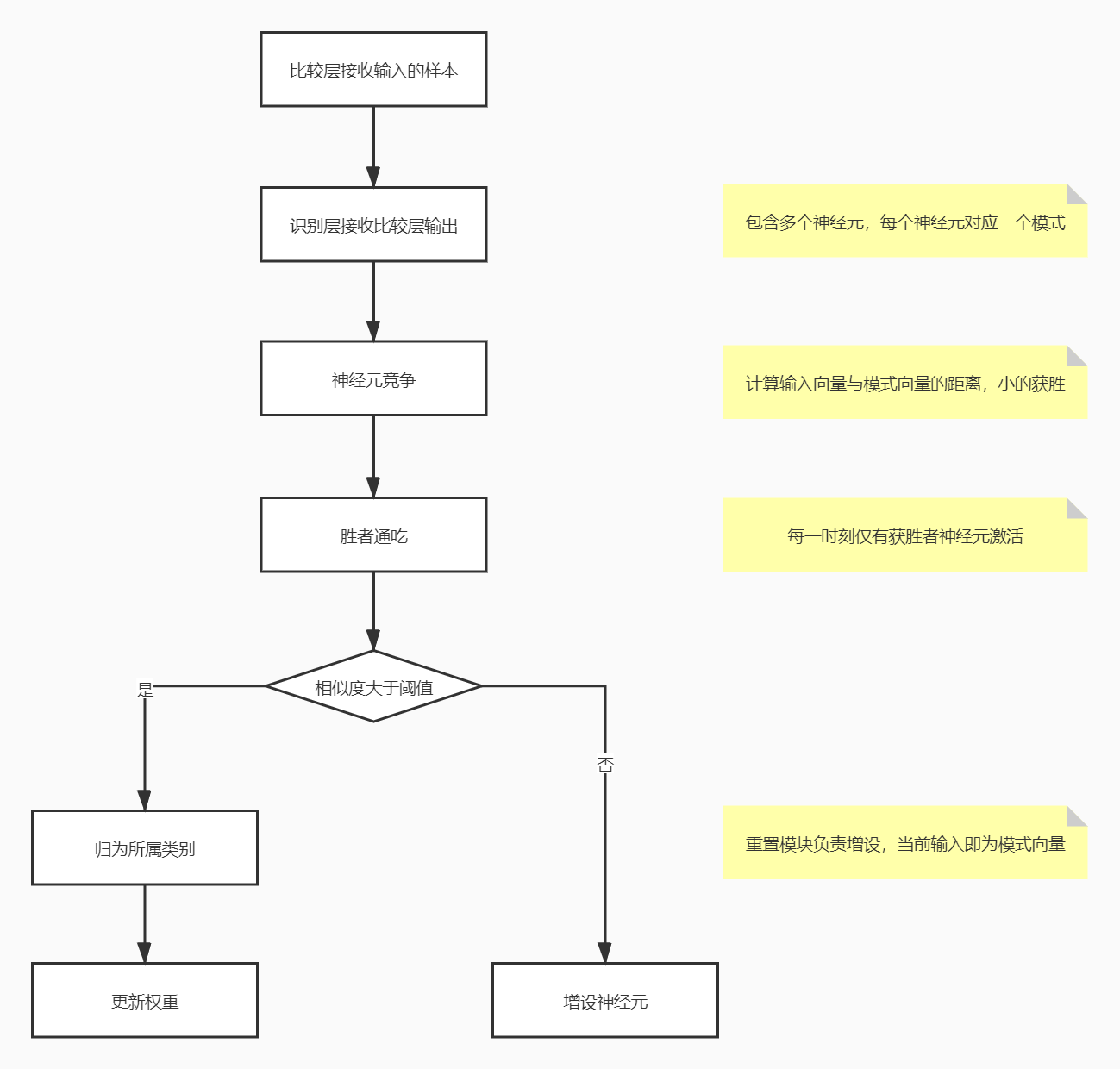
【机器学习西瓜书学习笔记——神经网络】
机器学习西瓜书学习笔记【第五章】 第五章 神经网络5.1神经元模型5.2 感知机与多层网络学习感知机学习率成本/损失函数梯度下降 5.3 BP神经网络(误差逆传播)5.4 全局最小与局部极小5.5 其他常见神经网络RBF网络RBF 与 BP 最重要的区别 ART网络 第五章 神…...

安装 electron 报错解决
1. 报错 大概率由镜像问题导致 2. 解决 2.1 打开 npm 配置 npm config edit 2.2 添加配置 registryhttps://registry.npmmirror.comelectron_mirrorhttps://cdn.npmmirror.com/binaries/electron/electron_builder_binaries_mirrorhttps://npmmirror.com/mirrors/electron…...

【Material-UI】Icon Button 组件详解
文章目录 一、基础用法1. 禁用状态 二、大小(Sizes)1. 小尺寸(Small)2. 大尺寸(Large) 三、颜色(Colors)1. 主题颜色2. 自定义颜色 四、高级用法和最佳实践1. 无障碍性(A…...

51单片机-第七节-DS1302实时时钟
一、DS1302介绍: 实时时钟芯片,可对年,月,日,周,时,分,秒计时,是一种集成电路。 二、DS1302原理: 1.寄存器定义: Command:操作模式…...

Java毕业设计 基于SSM和Vue的图书馆座位预约系统小程序
Java毕业设计 基于SSM和Vue的图书馆座位预约系统小程序 这篇博文将介绍一个基于SSM框架和Vue开发的图书馆座位预约系统微信小程序,适合用于Java毕业设计。 功能介绍 用户 登录 注册 首页 图片轮播 关于我们 公告信息 图书馆信息 图书馆详情 预约选座 收藏 …...

【C++11】:lambda表达式function包装器
目录 前言一,可变参数模板1.1 简单认识1.2 STL容器中的empalce系列相关接口 二,lambda表达式2.1 lambda表达式语法2.2 探索lambda底层 三,包装器3.1 function包装器3.2 bind 四,类的新功能4.1 默认成员函数4.2 关键字default4.3 关…...

[io]进程间通信 -有名、无名管道 区别
有名管道和无名管道的区别 无名管道有名管道 使用场景 亲缘关系进程不相关的任意进程特点 1.固定读端fd[0]写端fd[1] 2.文件IO进行操作 3.不支持lseek()操作 4.数据存储在内核空间 1.文件系统中存在管道文件 2.文件IO操作 3.不支持lseek 4.先进先出 5.数…...
pywinauto:Windows桌面应用自动化测试(七)
前言 上一篇文章地址: pywinauto:Windows桌面应用自动化测试(六)-CSDN博客 下一篇文章地址: 暂无 一、实战常用方法 1、通过Desktop快速获取窗口 通过之前章节我们了解到控制应用的方法为Application࿰…...

RGB++是什么;UTXO是什么;Nervos网络;CKB区块链;
目录 RGB++是什么,简单举例说明 RGB++简介 举例说明 UTXO是什么 定义 功能与特点 使用方式 优缺点 结论 CKB区块链 一、基础属性 二、技术特点 三、经济模型 四、应用场景 Nervos网络 一、网络架构 二、技术特点 三、经济模型 四、应用场景 五、未来展望 …...

轻闪PDF v2.14.9 解锁版下载与安装教程 (全能PDF转换器)
前言 轻闪PDF(原傲软PDF编辑软件)是一款操作简单的全能PDF转换器,轻松实现PDF转换为Word,Excel或其他格式,以及PDF压缩,合并和图片文字识别OCR等功能.这款pdf编辑转换软件几乎支持所有常见文档格式,一键完成PDF与其他文档互相转换,并含有PDF合并,压缩,图片文字识别OCR等增值功…...

告别拍脑袋规划!用ArcGIS做绿道选线:如何科学量化坡度、水域、道路成本并加权计算
科学规划绿道的ArcGIS高阶技法:从成本栅格构建到最优路径生成绿道规划从来不是简单的"两点之间直线最短",而是需要综合考虑地形、生态、人文等多维因素的复杂决策过程。传统规划中常见的"拍脑袋"决策方式,往往导致建成后…...

ARM架构CONSTRAINED UNPREDICTABLE行为解析与应对
1. ARM架构中的CONSTRAINED UNPREDICTABLE行为解析在处理器架构设计中,UNPREDICTABLE行为通常指架构规范未明确定义的执行结果,可能导致不可预期的系统状态。ARM架构通过引入CONSTRAINED UNPREDICTABLE机制,将这类行为限制在特定范围内&#…...

航空航天为什么离不开高强镁合金?国产替代到哪一步了
飞机每减重一千克,全年大约节省四千两百美元的燃油费用——这是航空工程师熟悉的经验值。在商业航空领域,这个数字还只是财务账;在战斗机、导弹和卫星的世界里,减重的收益被换算成更远的航程、更大的载荷、更高的机动性࿰…...

Burp Suite深度解析:从流量抓包到业务逻辑漏洞挖掘
1. 这不是“学个插件”——Burp Suite 是渗透测试的呼吸系统 很多人第一次听说 Burp Suite,是在某篇“三步拿下登录框”的速成教程里:装好Java、拖进浏览器代理、点几下Repeater就弹出密码明文。结果真去测一个中型SaaS后台,不到十分钟就卡在…...

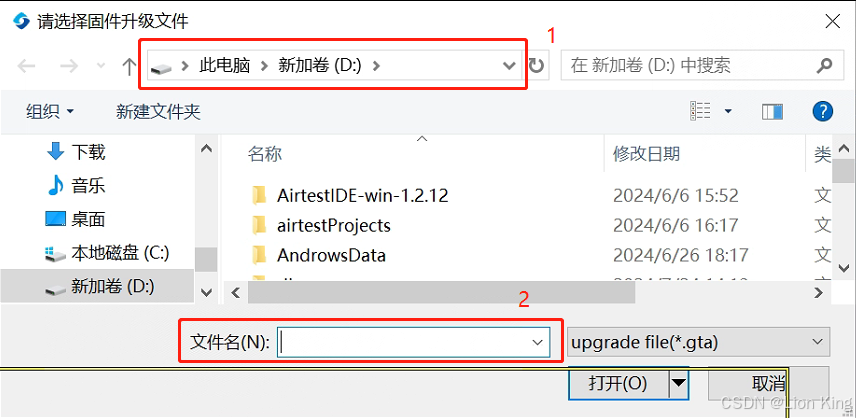
rk35xx 通过recovery升级问题
Firefly 的 recovery 库是一个核心组件,它构建了一个独立的微型 Linux 系统,专门用于在设备主系统之外执行高可靠性的固件升级。简单来说,它的工作流程是:主系统通过命令触发,将升级指令写入特定分区并重启;…...

flameshow性能优化技巧:如何快速定位Go程序中的CPU热点
flameshow性能优化技巧:如何快速定位Go程序中的CPU热点 【免费下载链接】flameshow A terminal Flamegraph viewer. 项目地址: https://gitcode.com/gh_mirrors/fl/flameshow 🔥 想要快速定位Go程序中的性能瓶颈吗?flameshow是一个强大…...

氘可来昔替尼常见副作用为鼻咽炎头痛及腹泻,如何应对
任何口服药物的临床价值,都必须在疗效与安全性的天平上找到精准的平衡点。氘可来昔替尼以PASI 75应答率的全面胜出证明了自己在银屑病治疗中的卓越地位,而其不良反应谱同样经过了严苛的临床验证。鼻咽炎、头痛和腹泻构成了这款药物最需关注的三大安全信号…...

终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词
终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 你是否厌倦了在听歌时手动搜索歌词…...
)
告别杂乱!用FileMenu Tools 8.4.2一键清理Windows 11右键菜单(附隐藏技巧)
Windows 11右键菜单精简指南:用FileMenu Tools打造高效工作流每次在文件上点击右键时,那个缓慢弹出的冗长菜单是否让你感到烦躁?随着安装的软件越来越多,Windows的右键菜单往往会变得臃肿不堪,严重影响工作效率。今天&…...

应对Claude Code访问不稳定,快速切换至Taotoken的应急方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 应对Claude Code访问不稳定,快速切换至Taotoken的应急方案 对于依赖Claude Code进行日常开发或自动化任务的用户来说&a…...