STM32的CAN总线调试经验分享
相关文章
CAN总线简易入门教程
CAN总线显性电平和隐性电平详解
STM32的CAN总线调试经验分享
文章目录
- 相关文章
- 背景
- CAN总线
- CAN控制器
- CAN收发器
- 调试过程
- 硬件排查
- CAN分析仪
- 芯片CAN控制器调试
- 总结
背景
最近负责的一个项目用的主控芯片是STM32F407IGT6,需要和几个电机控制器进行通讯,有很多参数需要进行监控。负责固件开发的同事一直搞不定一个问题。就是开启CAN的接收中断,接收不到数据,问题卡了很久,一直无法闭环。
CAN总线
CAN总线是一种串行通信协议,用于在微控制器和其他设备之间传输数据。CAN总线通常用于汽车、工业自动化和机器人等领域。
CAN总线的硬件通常由以下几个部分组成:
- 控制器区域:包括CAN控制器和CAN收发器;
- 总线电缆:用于连接CAN总线上的所有设备;
- 终端电阻:用于终止总线,以减少反射和信号干扰;
- 外部电源:用于为CAN总线提供电源;
CAN总线的控制器区域通常包括CAN控制器和CAN收发器。
- CAN控制器负责处理CAN总线上的数据传输,包括数据发送和接收、错误检测和纠正等;
- CAN收发器则负责将CAN控制器的信号转换为总线上的电信号,并将总线上的电信号转换为CAN控制器可以理解的信号。
CAN控制器
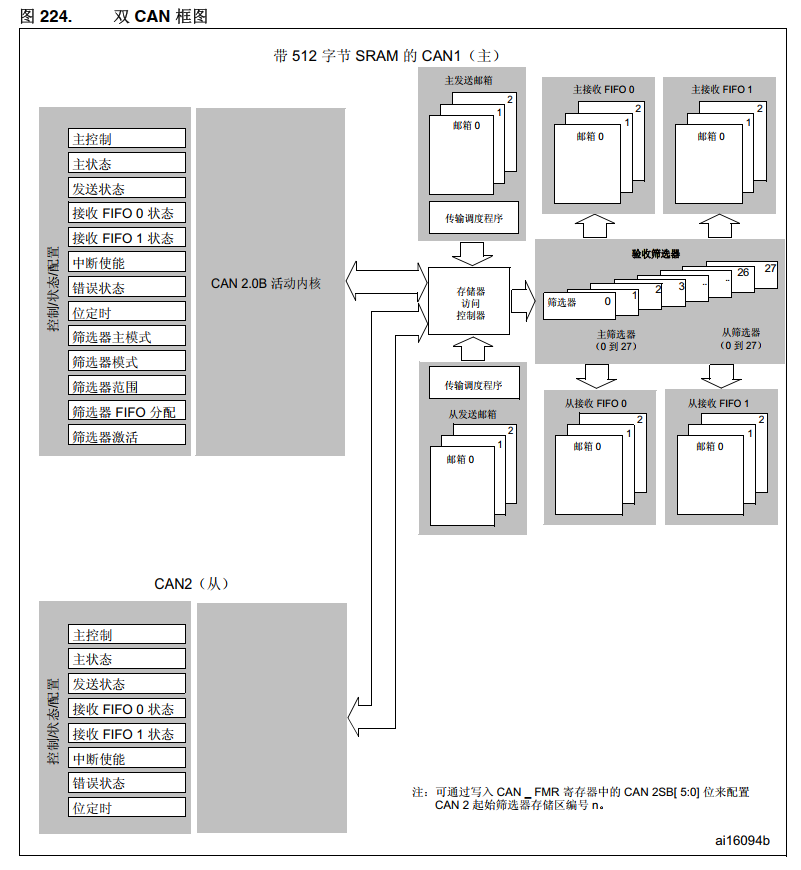
主板上的芯片STM32F407IGT6中带有两路的CAN控制器,分别为CAN1 和 CAN2,具体如下图所示;
CAN收发器
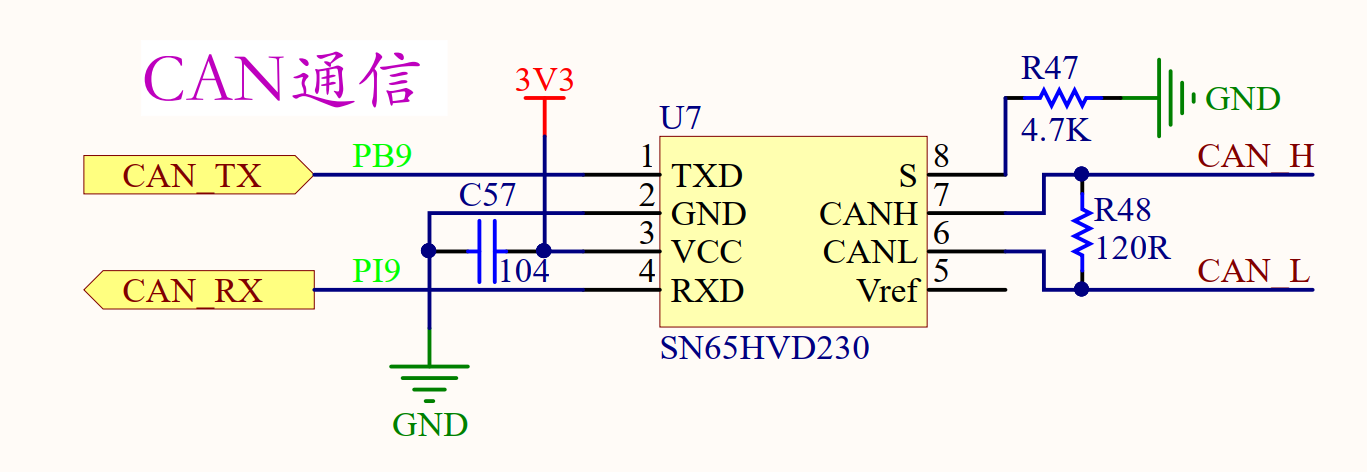
主板上使用的是芯片SN65HVD230,这是TI公司的一款性能强大且具体低功耗功能的CAN收发器,具体的典型应用电路如下所示;
调试过程
硬件排查
设备的调试过程中,首先要确保硬件链路上是否正常。最常见的方法就是直接用示波器进行检查。
具体如下所示;

- 检查CAN控制器和CAN收发器之间是否正常;
- 检查CAN收发器的差分信号是否正常,这里可能要了解一下CAN总线电平的显性电平和隐性电平的特点,以及CAN底层协议的细节,会比较复杂;
个人比较推荐使用上述步骤检查硬件链路是否存在问题,那如何对数据进行分析呢?当然可以对着示波器的波形一点一点进行分析,但是这样是很低效的,这里我建议使用CAN分析仪进行数据抓包,下面我们继续进行介绍。
CAN分析仪
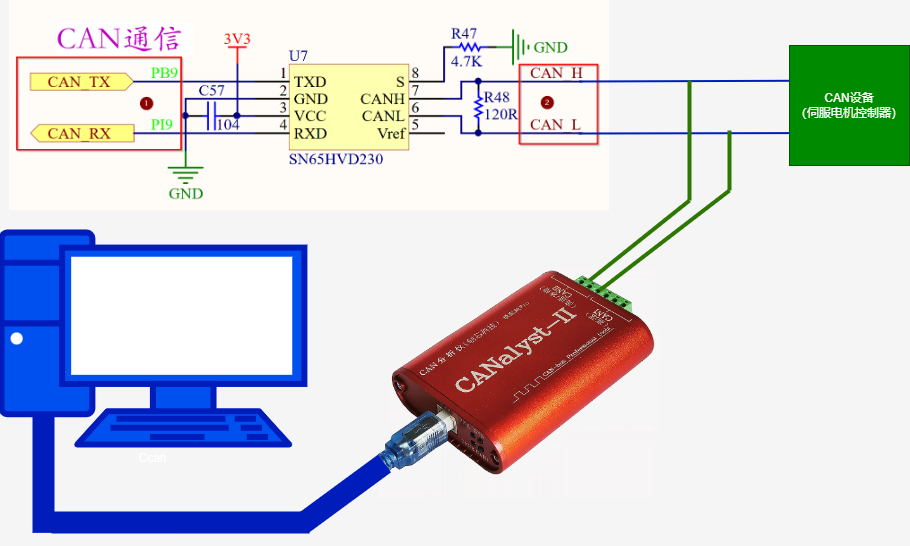
至于数据传输是否正确,可以使用CAN盒进行数据监听,下面是我使用的一款CAN分析仪,如图;

将CAN分析仪的CAN_H和CAN_L分别并联到CAN收发器的CAN_H和CAN_L上,然后打开CAN分析仪厂家提供的PC软件,就可以对CAN总线的数据进行监听;
- 将CAN分析仪接入到CAN总线;
- 将CAN分析仪连接到电脑(这里是USB接口),需要配置相同的波特率;
- 打开CAN分析仪配套的PC软件,进行数据的收发;

进行到这里,我在项目中遇到的问题是,发送正常,但是STM32F407无法接收到连续的数据,可以接收到一次数据,后面便无法再进入中断。
这时候,只能再芯片端进行Debug了。
芯片CAN控制器调试
这里的代码用的HAL库,库版本相对来说比较老,是V1.7.10版本的,如下图所示;
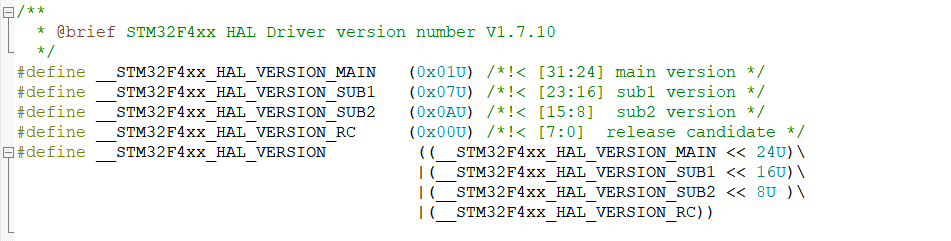
当时我把项目升级到最新的HAL库,发现CAN部分的驱动改动比较大,另外,下文都是基于V1.7.10版本的HAL库。
CAN控制器的初始化代码如下所示;
void MX_CAN_Init(void)
{CAN_FilterConfTypeDef sFilterConfig;/*CAN单元初始化*/hCAN.Instance = CANx; /* CAN外设 */hCAN.pTxMsg = &TxMessage;hCAN.pRxMsg = &RxMessage;hCAN.Init.Prescaler = 6; /* BTR-BRP 波特率分频器 定义了时间单元的时间长度 42/(1+6+7)/6 = 500Kbps */hCAN.Init.Mode = CAN_MODE_NORMAL; /* 正常工作模式 */hCAN.Init.SJW = CAN_SJW_1TQ; /* BTR-SJW 重新同步跳跃宽度 1个时间单元 */hCAN.Init.BS1 = CAN_BS1_6TQ; /* BTR-TS1 时间段1 占用了6个时间单元 */hCAN.Init.BS2 = CAN_BS2_7TQ; /* BTR-TS1 时间段2 占用了7个时间单元 */hCAN.Init.TTCM = DISABLE; /* MCR-TTCM 关闭时间触发通信模式使能 */hCAN.Init.ABOM = ENABLE; /* MCR-ABOM 自动离线管理 */hCAN.Init.AWUM = ENABLE; /* MCR-AWUM 使用自动唤醒模式 */hCAN.Init.NART = DISABLE; /* MCR-NART 禁止报文自动重传 DISABLE-自动重传 */hCAN.Init.RFLM = DISABLE; /* MCR-RFLM 接收FIFO 锁定模式 DISABLE-溢出时新报文会覆盖原有报文 */hCAN.Init.TXFP = DISABLE; /* MCR-TXFP 发送FIFO优先级 DISABLE-优先级取决于报文标示符 */HAL_CAN_Init(&hCAN);/*CAN过滤器初始化*/sFilterConfig.FilterNumber = 0; /* 过滤器组0 */sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; /* 工作在标识符屏蔽位模式 */sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; /* 过滤器位宽为单个32位。*//* 使能报文标示符过滤器按照标示符的内容进行比对过滤,扩展ID不是如下的就抛弃掉,是的话,会存入FIFO0。 */sFilterConfig.FilterIdHigh = 0x0000; //(((uint32_t)0x1314<<3)&0xFFFF0000)>>16; /* 要过滤的ID高位 */sFilterConfig.FilterIdLow = 0x0000; //(((uint32_t)0x1314<<3)|CAN_ID_EXT|CAN_RTR_DATA)&0xFFFF; /* 要过滤的ID低位 */sFilterConfig.FilterMaskIdHigh = 0x0000; /* 过滤器高16位每位必须匹配 */sFilterConfig.FilterMaskIdLow = 0x0000; /* 过滤器低16位每位必须匹配 */sFilterConfig.FilterFIFOAssignment = 0; /* 过滤器被关联到FIFO 0 */sFilterConfig.FilterActivation = ENABLE; /* 使能过滤器 */ sFilterConfig.BankNumber = 14;HAL_CAN_ConfigFilter(&hCAN, &sFilterConfig);}
根据注释,可以大概看懂,另外再简单分析一下关键的几点;
- 波特率设置为 500Kbps;
- 对报文不进行过滤,可以接收任何扩展ID的数据;
虽然不进行任何过滤,但是还是无法接收到CAN回传的数据,无法进入的接收中断;
从STM32F407的编程手册里了解到,
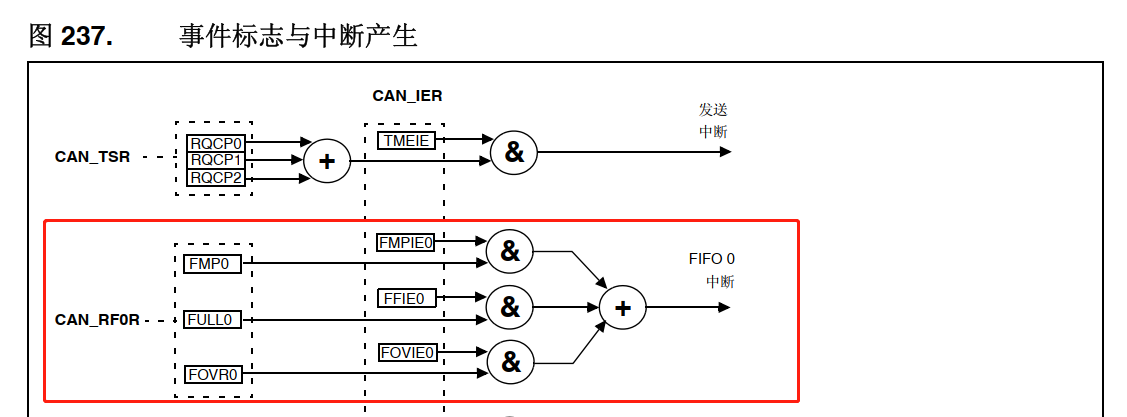
不难发现,CAN1的FIFO0产生接收中断需要满足三个条件中的任意一个;
FMPIE0置1且FMP0置1;FIFO不为空会产生中断FFIE0置1且FULL置1;FIFO满,会产生中断FOVIE0置1且FOVR0置1;FIFO溢出,会产生中断
手册里是这样描述的,如下图所示;

使用仿真器对芯片进行调试,设置断点,发现FMPIE0被清空了,具体如下图所示;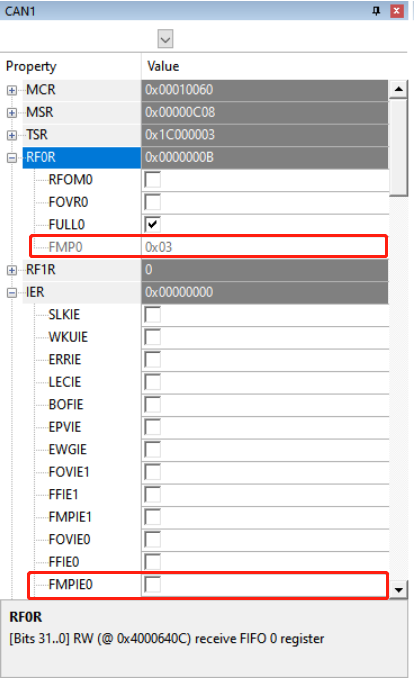
FMPIE0这一位是FIFO0中有挂起的消息会产生中断的中断使能标志位;


所以到这里,问题有点明朗了,为什么无法进入中断?是中断使能位被清空了。
那么下面就是检查代码,看看是哪里把中断给disable了。
继续调试,发现在ESR寄存器中,TEC的值一直增加,然后EWGF被值1了;具体如下所示;
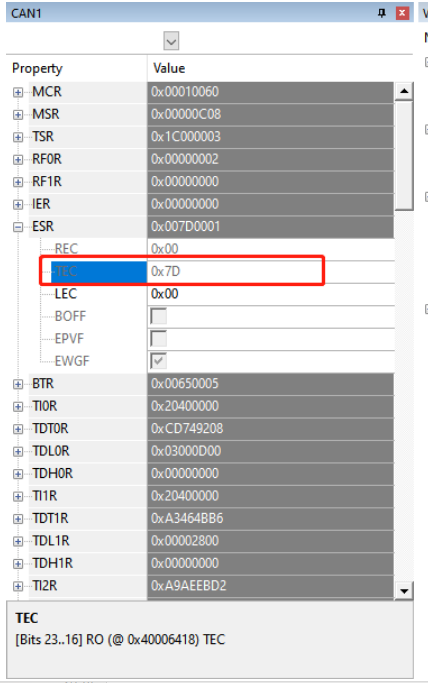
TEC和REC分别是发送错误计数器和接收错误计数器;
如 CAN 协议所述,错误管理完全由硬件通过发送错误计数器( CAN_ESR 寄存器中的 TEC
值)和接收错误计数器( CAN_ESR 寄存器中的 REC 值)来处理,这两个计数器根据错误
状况进行递增或递减。有关 TEC 和 REC 管理的详细信息,请参见 CAN 标准。
两者均可由软件读取,用以确定网络的稳定性。此外, CAN 硬件还将在 CAN_ESR 寄存器中
提供当前错误状态的详细信息。通过 CAN_IER 寄存器( ERRIE 位等),软件可以非常灵活
地配置在检测到错误时生成的中断。
当TEC大于96的时候,硬件会将EWGF置1(错误警告标志位);在代码中找到了相应的宏定义;这下问题越来越清晰了。
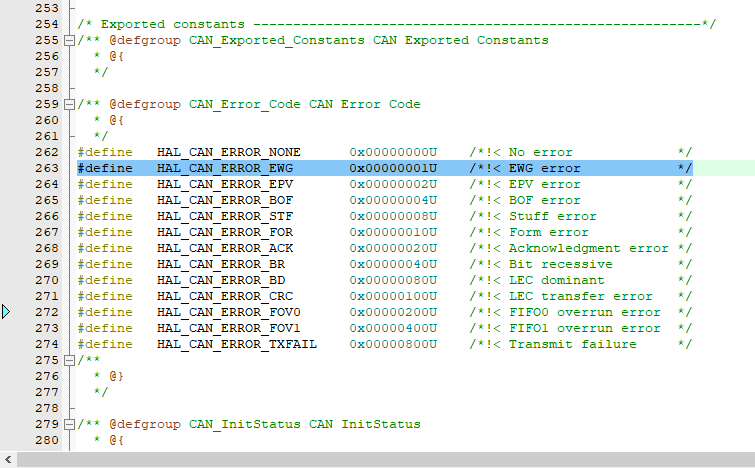
全文搜索这个宏定义,在HAL_CAN_IRQHandler中找到了__HAL_CAN_DISABLE_IT(CAN_IT_FMP0),关闭了FIFO0的消息挂起中断,
整体代码如下;
/*** @brief Handles CAN interrupt request * @param hcan: pointer to a CAN_HandleTypeDef structure that contains* the configuration information for the specified CAN.* @retval None*/
void HAL_CAN_IRQHandler(CAN_HandleTypeDef* hcan)
{uint32_t tmp1 = 0U, tmp2 = 0U, tmp3 = 0U;uint32_t errorcode = HAL_CAN_ERROR_NONE;/* Check Overrun flag for FIFO0 */tmp1 = __HAL_CAN_GET_FLAG(hcan, CAN_FLAG_FOV0);tmp2 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_FOV0);if(tmp1 && tmp2){/* Set CAN error code to FOV0 error */errorcode |= HAL_CAN_ERROR_FOV0;/* Clear FIFO0 Overrun Flag */__HAL_CAN_CLEAR_FLAG(hcan, CAN_FLAG_FOV0);}/* Check Overrun flag for FIFO1 */tmp1 = __HAL_CAN_GET_FLAG(hcan, CAN_FLAG_FOV1);tmp2 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_FOV1);if(tmp1 && tmp2){/* Set CAN error code to FOV1 error */errorcode |= HAL_CAN_ERROR_FOV1;/* Clear FIFO1 Overrun Flag */__HAL_CAN_CLEAR_FLAG(hcan, CAN_FLAG_FOV1);}/* Check End of transmission flag */if(__HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_TME)){tmp1 = __HAL_CAN_TRANSMIT_STATUS(hcan, CAN_TXMAILBOX_0);tmp2 = __HAL_CAN_TRANSMIT_STATUS(hcan, CAN_TXMAILBOX_1);tmp3 = __HAL_CAN_TRANSMIT_STATUS(hcan, CAN_TXMAILBOX_2);if(tmp1 || tmp2 || tmp3) {tmp1 = __HAL_CAN_GET_FLAG(hcan, CAN_FLAG_TXOK0);tmp2 = __HAL_CAN_GET_FLAG(hcan, CAN_FLAG_TXOK1);tmp3 = __HAL_CAN_GET_FLAG(hcan, CAN_FLAG_TXOK2);/* Check Transmit success */if(tmp1 || tmp2 || tmp3){/* Call transmit function */CAN_Transmit_IT(hcan);}else /* Transmit failure */{/* Set CAN error code to TXFAIL error */errorcode |= HAL_CAN_ERROR_TXFAIL;}/* Clear transmission status flags (RQCPx and TXOKx) */SET_BIT(hcan->Instance->TSR, CAN_TSR_RQCP0 | CAN_TSR_RQCP1 | CAN_TSR_RQCP2 | \CAN_FLAG_TXOK0 | CAN_FLAG_TXOK1 | CAN_FLAG_TXOK2);}}tmp1 = __HAL_CAN_MSG_PENDING(hcan, CAN_FIFO0);tmp2 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_FMP0);/* Check End of reception flag for FIFO0 */if((tmp1 != 0U) && tmp2){/* Call receive function */CAN_Receive_IT(hcan, CAN_FIFO0);}tmp1 = __HAL_CAN_MSG_PENDING(hcan, CAN_FIFO1);tmp2 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_FMP1);/* Check End of reception flag for FIFO1 */if((tmp1 != 0U) && tmp2){/* Call receive function */CAN_Receive_IT(hcan, CAN_FIFO1);}/* Set error code in handle */hcan->ErrorCode |= errorcode;tmp1 = __HAL_CAN_GET_FLAG(hcan, CAN_FLAG_EWG);tmp2 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_EWG);tmp3 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_ERR);/* Check Error Warning Flag */if(tmp1 && tmp2 && tmp3){/* Set CAN error code to EWG error */hcan->ErrorCode |= HAL_CAN_ERROR_EWG;}tmp1 = __HAL_CAN_GET_FLAG(hcan, CAN_FLAG_EPV);tmp2 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_EPV);tmp3 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_ERR); /* Check Error Passive Flag */if(tmp1 && tmp2 && tmp3){/* Set CAN error code to EPV error */hcan->ErrorCode |= HAL_CAN_ERROR_EPV;}tmp1 = __HAL_CAN_GET_FLAG(hcan, CAN_FLAG_BOF);tmp2 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_BOF);tmp3 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_ERR); /* Check Bus-Off Flag */if(tmp1 && tmp2 && tmp3){/* Set CAN error code to BOF error */hcan->ErrorCode |= HAL_CAN_ERROR_BOF;}tmp1 = HAL_IS_BIT_CLR(hcan->Instance->ESR, CAN_ESR_LEC);tmp2 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_LEC);tmp3 = __HAL_CAN_GET_IT_SOURCE(hcan, CAN_IT_ERR);/* Check Last error code Flag */if((!tmp1) && tmp2 && tmp3){tmp1 = (hcan->Instance->ESR) & CAN_ESR_LEC;switch(tmp1){case(CAN_ESR_LEC_0):/* Set CAN error code to STF error */hcan->ErrorCode |= HAL_CAN_ERROR_STF;break;case(CAN_ESR_LEC_1):/* Set CAN error code to FOR error */hcan->ErrorCode |= HAL_CAN_ERROR_FOR;break;case(CAN_ESR_LEC_1 | CAN_ESR_LEC_0):/* Set CAN error code to ACK error */hcan->ErrorCode |= HAL_CAN_ERROR_ACK;break;case(CAN_ESR_LEC_2):/* Set CAN error code to BR error */hcan->ErrorCode |= HAL_CAN_ERROR_BR;break;case(CAN_ESR_LEC_2 | CAN_ESR_LEC_0):/* Set CAN error code to BD error */hcan->ErrorCode |= HAL_CAN_ERROR_BD;break;case(CAN_ESR_LEC_2 | CAN_ESR_LEC_1):/* Set CAN error code to CRC error */hcan->ErrorCode |= HAL_CAN_ERROR_CRC;break;default:break;}/* Clear Last error code Flag */ hcan->Instance->ESR &= ~(CAN_ESR_LEC);}/* Call the Error call Back in case of Errors */if(hcan->ErrorCode != HAL_CAN_ERROR_NONE){/* Clear ERRI Flag */ hcan->Instance->MSR = CAN_MSR_ERRI; /* Set the CAN state ready to be able to start again the process */hcan->State = HAL_CAN_STATE_READY;/* Disable interrupts: *//* - Disable Error warning Interrupt *//* - Disable Error passive Interrupt *//* - Disable Bus-off Interrupt *//* - Disable Last error code Interrupt *//* - Disable Error Interrupt *//* - Disable FIFO 0 message pending Interrupt *//* - Disable FIFO 0 Overrun Interrupt *//* - Disable FIFO 1 message pending Interrupt *//* - Disable FIFO 1 Overrun Interrupt *//* - Disable Transmit mailbox empty Interrupt */__HAL_CAN_DISABLE_IT(hcan, CAN_IT_EWG |CAN_IT_EPV |CAN_IT_BOF |CAN_IT_LEC |CAN_IT_ERR |CAN_IT_FMP0|CAN_IT_FOV0|CAN_IT_FMP1|CAN_IT_FOV1|CAN_IT_TME);/* Call Error callback function */HAL_CAN_ErrorCallback(hcan);}
}
最后,找到无法进入接收中断的原因,是CAN总线出现发送错误的情况,从而触发了错误警告标志位EWGF,进而将关闭了消息挂起中断。
总结
本文简单介绍了在STM32F407上的CAN总线调试过程,解决了一个数据接收的问题,简单整理了一下调试的过程和思路。不过本人能力有限,难免存在错误和纰漏,请不吝赐教,如果文章帮到了你,点赞支持一下👍👍👍
相关文章:
STM32的CAN总线调试经验分享
相关文章 CAN总线简易入门教程 CAN总线显性电平和隐性电平详解 STM32的CAN总线调试经验分享 文章目录相关文章背景CAN总线CAN控制器CAN收发器调试过程硬件排查CAN分析仪芯片CAN控制器调试总结背景 最近负责的一个项目用的主控芯片是STM32F407IGT6,需要和几个电机控…...

深度剖析自定义类型(结构体、枚举、联合)——“C”
各位CSDN的uu们你们好呀,今天,小雅兰的内容是心心念念的结构体啦,其实在此之前,我也写过结构体的知识点,只是并没有很深入,那么,今天我会仔细来学习自定义类型的知识点,下面…...
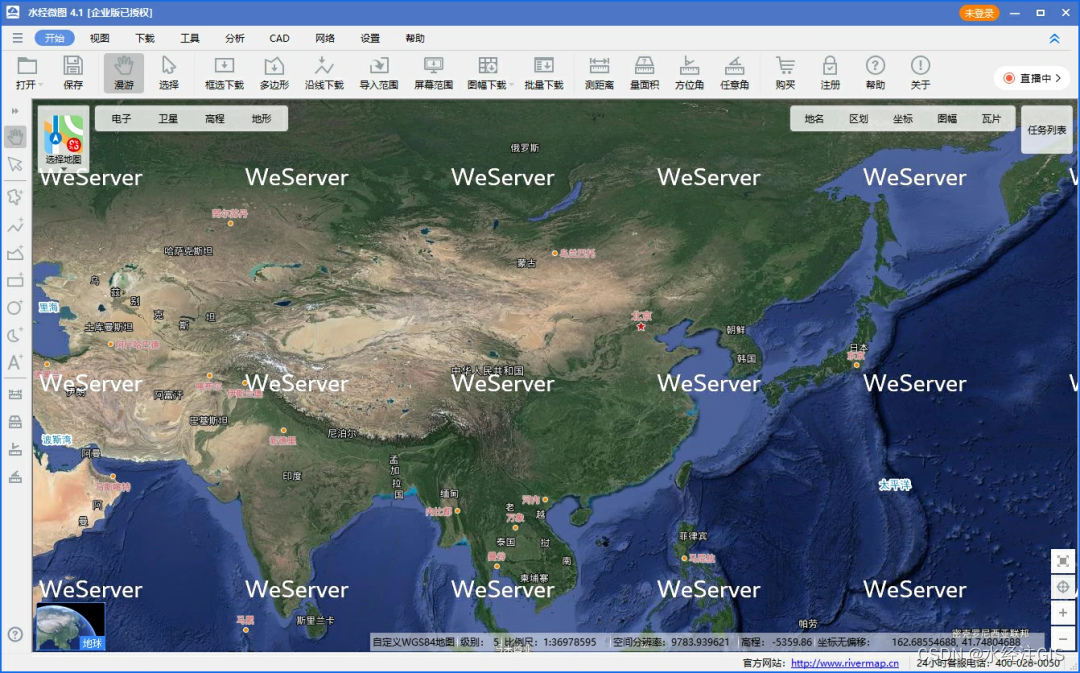
《水经注地图服务》发布的全球影像数据在水经微图中调用
(本文首发于“水经注GIS”公号,订阅“水经注GIS”公号,为你分享更多GIS技术 )1、引言古人云:“工欲善其事,必先利其器。”意思是说:工匠想要使他的工作做好,一定要先让工具锋利&…...
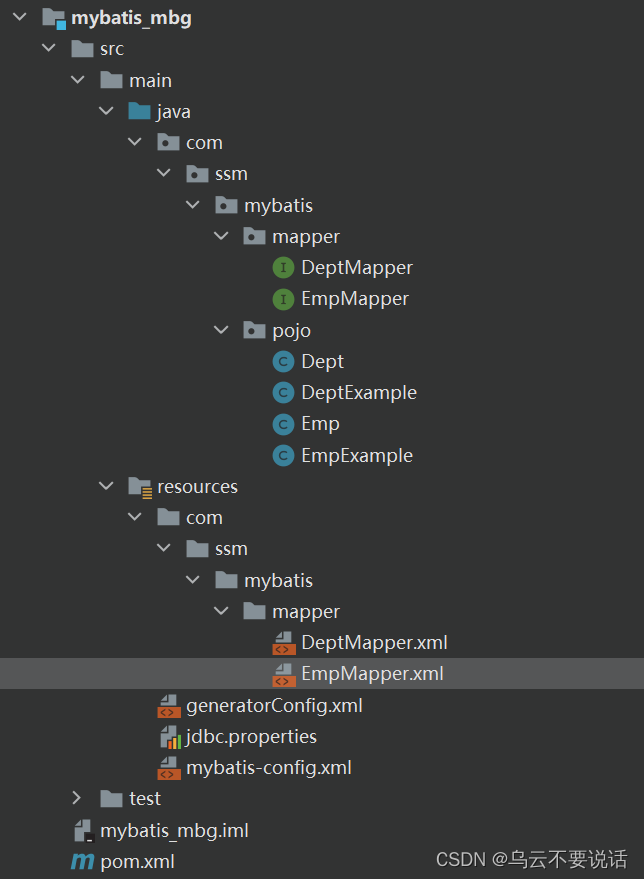
MyBatis --- 缓存、逆向工程、分页插件
一、MyBatis的缓存 1.1、MyBatis的一级缓存 一级缓存是SqlSession级别的,通过同一个SqlSession查询的数据会被缓存,下次查询相同的数据,就会从缓存中直接获取,不会从数据库重新访问 使一级缓存失效的四种情况: 1、…...
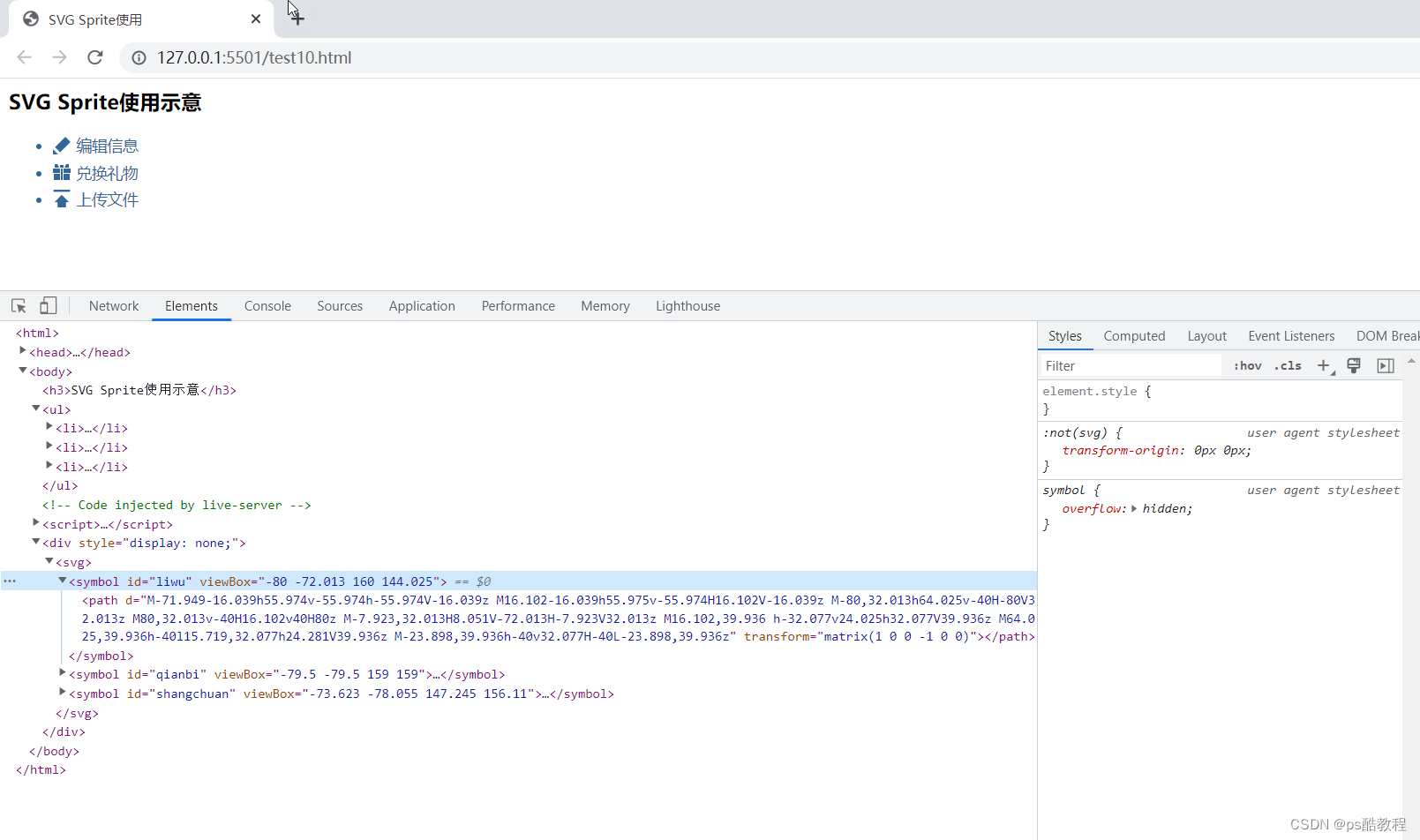
vue3自定义svg图标组件
可参考: 未来必热:SVG Sprites技术介绍 懒人神器:svg-sprite-loader实现自己的Icon组件 在Vue3项目中使用svg-sprite-loader 前置知识 在页面中,虽然可以通过如下的方式使用img标签,来引入svg图标。但是,…...
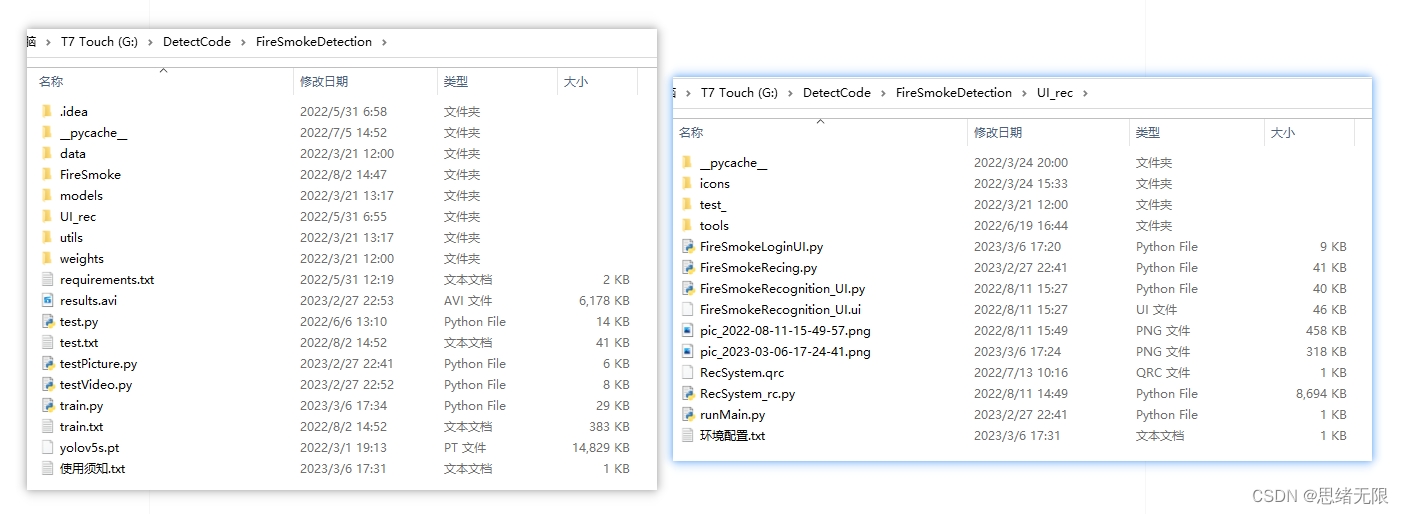
智能火焰与烟雾检测系统(Python+YOLOv5深度学习模型+清新界面)
摘要:智能火焰与烟雾检测系统用于智能日常火灾检测报警,利用摄像头画面实时识别火焰与烟雾,另外支持图片、视频火焰检测并进行结果可视化。本文详细介绍基于智能火焰与烟雾检测系统,在介绍算法原理的同时,给出Python的…...

Java实习生------JUC并发编程(多线程)10道面试题打卡⭐⭐⭐
目录 并行和并发有什么区别? 线程和进程有什么区别? 创建线程有哪几种方式? runnable和callable有什么区别? 线程的状态及转换? sleep()和wait()的区别? run()和start()有什么区别? 在…...
ChatGPT和百度文心一言写用例,谁更强?
文心一言发布的第一时间,就排队申请了邀请码,昨晚看了下,邀请码已经到手,索性就拿一个例子试了一下,看看哪个能够真正意义上的提高生产力,最简单的录制了个GIF动画如下:问题:你是一个…...

设计模式总结
设计模式的六大原则 开放-封闭原则(OCP) (总原则) Open-Close Principle:该对扩展开放,对修改关闭。 目的就是保证程序的扩展性好,易于维护和升级。 开放-封闭原则是面向对象设计的核心所在, 开闭原则是Java世界里最基础的设计原则。 开闭…...

【K8S系列】深入解析Pod对象(一)
目录 序言 1.问题引入 1.1 问题描述 2 问题解答 2.1 pod 属性 2.1.1 NodeSelector 2.1.2 HostAliases 2.1.3 shareProcessNamespace 2.1.4 NodeName 2.1.5 其他pod属性 2.2 容器属性 2.2.1 ImagePullPolicy 2.2.2 Lifecycle 3 总结 4. 投票 序言 任何一件事情&am…...
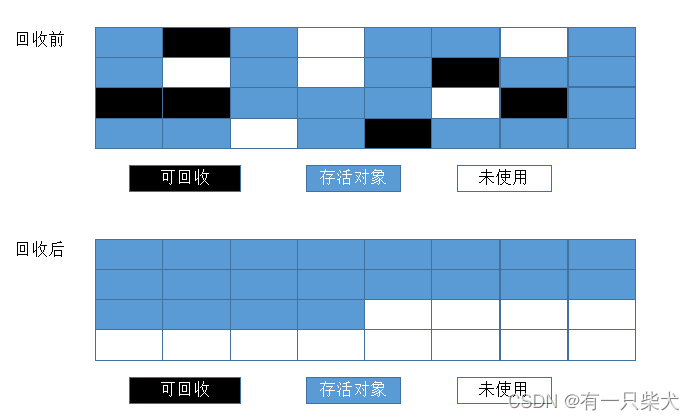
JVM学习.02 内存分配和回收策略
1、前言《JVM学习.01 内存模型》篇讲述了JVM的内存布局,其中每个区域是作用,以及创建实例对象的时候内存区域的工作流程。上文还讲到了关于对象存货后,会被回收清理的过程。今天这里就着重讲一下对象实例是如何被清理回收的,以及清…...
日志收集)
logstash+elasticsearch+Kibana(ELK)日志收集
文章目录一.安装ELK 7.17二.为Elasticsearch设置密码三.配置logstash四.springboot整合logstash五.spring整合Elastic Search一.安装ELK 7.17 不要一股脑执行以下语句,请观察修改要修改的地方 安装logstash # logstash安装docker run -d --name logstash \-p 5043:5043 -p 5…...

今天面试了一个2年Java经验的
今天去面试了一个26岁的程序员,看了简历,2年经验,本科,写得很牛叉。 Spring cloud alibaba全家桶、redis,分布式锁,服务调用,数据库事务,线程,Zookeeper、Dubbo 、Rabbi…...

逻辑覆盖测试用例设计
逻辑覆盖测试用例设计 实验目标 能够依据程序画出程序流程图理解常用覆盖方法的内涵理解常用覆盖方法的强弱关系能够使用常用覆盖方法设计测试用例 背景知识 白盒测试通常采用静态测试方法和动态测试方法开展。动态测试是参照系统需求或测试规则,通过预先设计一…...
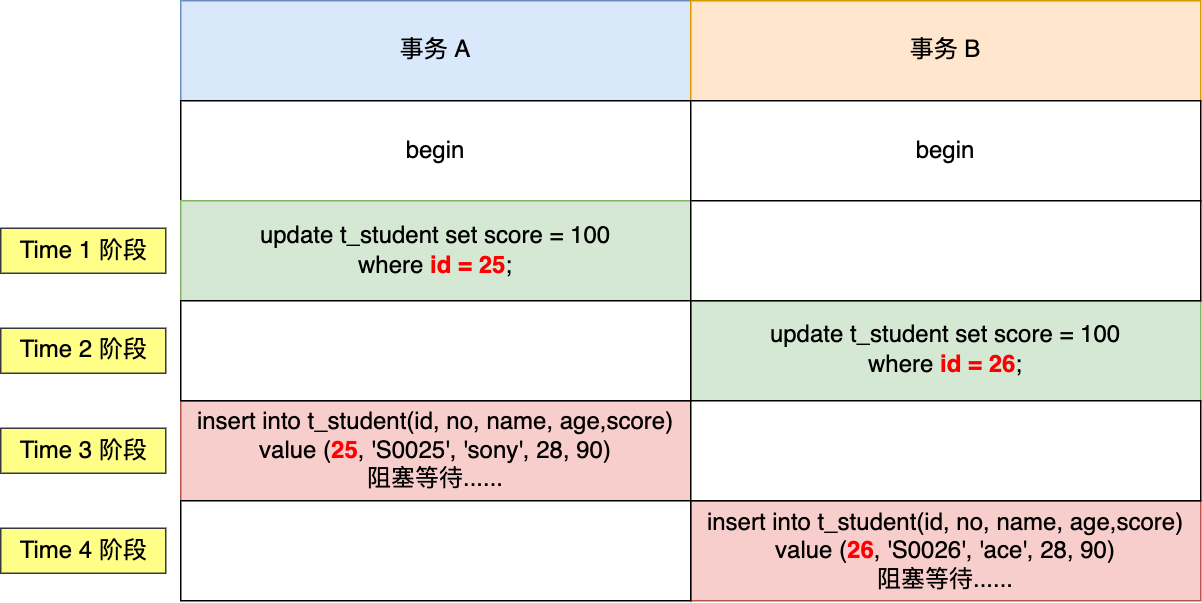
面试官:说一下MySQL中的锁机制吧
5. 1MySQL有哪些锁? 为保证数据的一致性,需要对并发操作进行控制,因此产生了锁。同时锁机制也为实现MySQL的各个隔离级别提供了保证。 锁冲突 也是影响数据库并发访问性能的一个重要因素。所以锁对数据库而言显得尤其重要,也更加…...
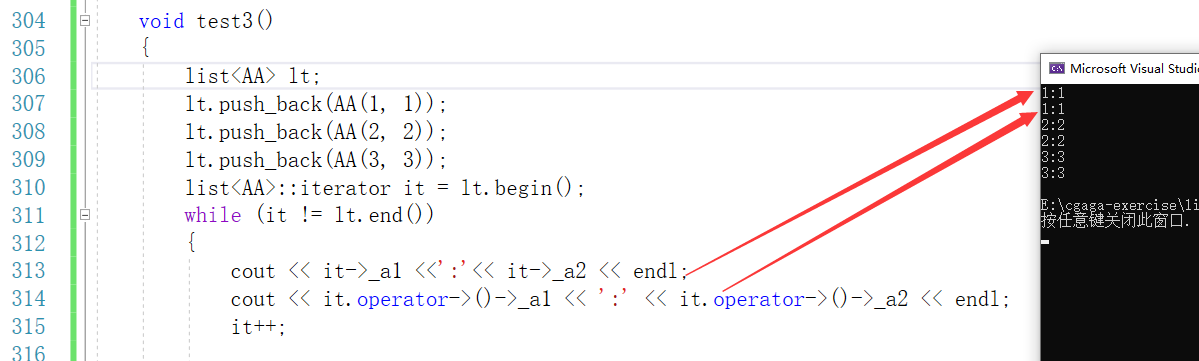
STL库中list的迭代器实现痛点分析
前文本篇文章准备换个模式,之前都是先详解模拟实现,但是模拟实现的基本逻辑大多数老铁都是明白的,所以我们这次主要讲解STL库中list的独特性,也就是模拟实现中的重难点文末有模拟实现的源码一,list实现的特殊类list实现…...
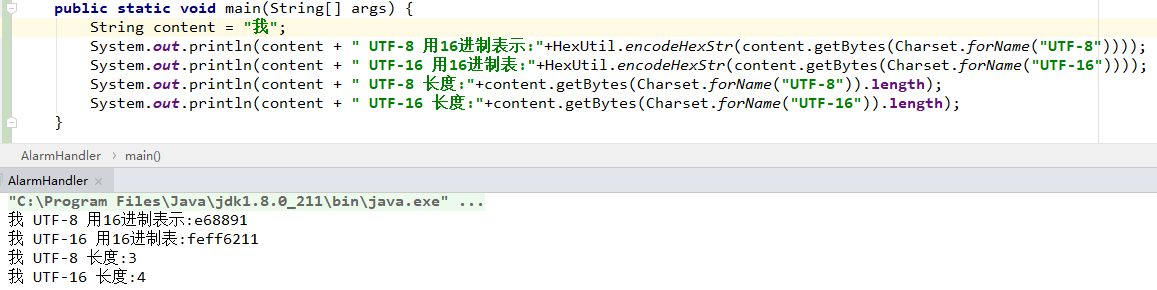
字符编码对比(GBK、Unicode、UTF-8)
摘要我们在网上能看到各种文字和符号,那么它们是怎么存储和转化的,还有我们常常提及的UTF-8,为什么都要设置这种编码方式,这里就探讨下。字符集字符集:就是各国文字、符号、数字的集合。常见的字符集有:ASC…...
【百面成神】Redis基础11问,你能坚持到第几问
前 言 🍉 作者简介:半旧518,长跑型选手,立志坚持写10年博客,专注于java后端 ☕专栏简介:纯手打总结面试题,自用备用 🌰 文章简介:Redis最基础、重要的11道面试题 文章目录…...

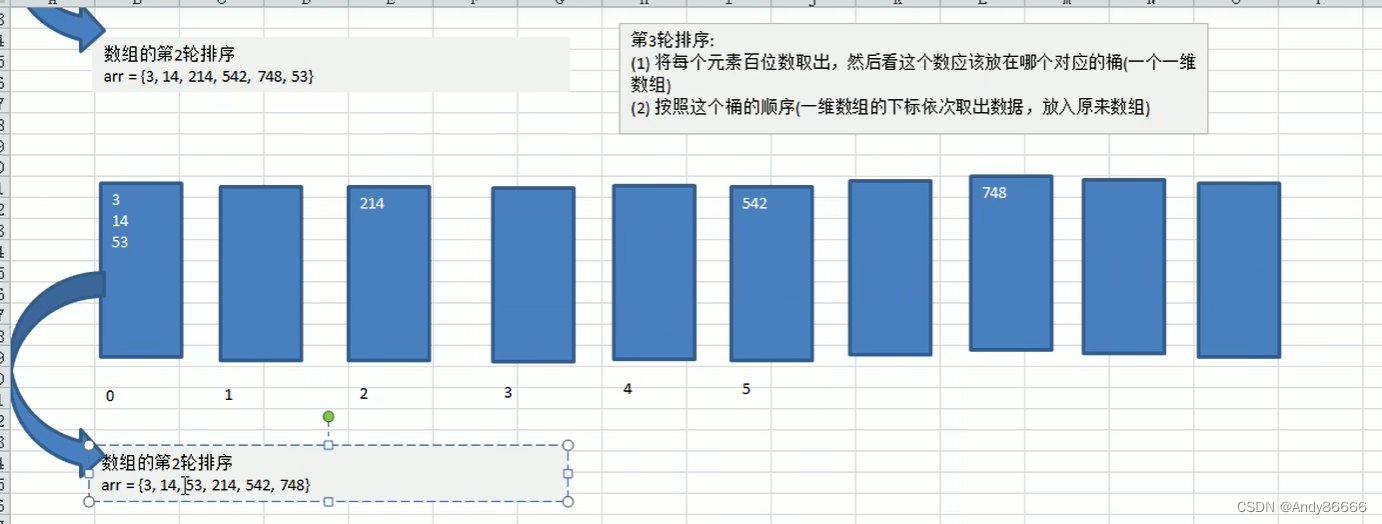
十大排序算法极简汇总篇
说明 十大排序算法可以说是每个程序员都必须得掌握的了,如果你们像从 0 详细学习每一篇,那么你们可以看前面的文章。 但是呢,有些人可能已经学过,想要快速复习一下,看看代码怎么写的,那么可以看这篇十大排…...
数据结构笔记
文章目录第一章:数据结构与算法第二章:稀疏数组和队列一 、稀疏sparsearray 数组(一)案例需求(二)稀疏数组介绍(三)应用实列(四)代码实现二、队列(…...

S2-Pro数据库课程设计助手:从需求分析到SQL生成的全程辅助
S2-Pro数据库课程设计助手:从需求分析到SQL生成的全程辅助 1. 课程设计的痛点与解决方案 每到学期末,数据库课程设计就成了计算机专业学生的"必修课"。面对一个陌生的业务场景,从零开始梳理需求、设计E-R图、编写SQL语句…...

解锁JSON Viewer 3大效率黑科技:从数据解析到开发提效的全流程解决方案
解锁JSON Viewer 3大效率黑科技:从数据解析到开发提效的全流程解决方案 【免费下载链接】json-viewer It is a Chrome extension for printing JSON and JSONP. 项目地址: https://gitcode.com/gh_mirrors/js/json-viewer JSON Viewer是一款专为开发者打造的…...

源码级重构与低代码交付:企业级 AI 视频管理平台的二次开发实战
作为一位在安防行业摸爬滚打 10 年的架构师,我经常被集成商朋友的灵魂拷问:“有没有一套代码,既能直接拿去给客户演示(低代码),又能让我根据客户需求改得‘面目全非’(深度定制)&…...

AEC-Q100到AEC-Q200:汽车电子组件认证标准差异与应用场景详解
AEC-Q100到AEC-Q200:汽车电子组件认证标准差异与应用场景详解 当一辆现代汽车驶过零下40度的北极圈,又穿越50度的沙漠高温,其电子系统仍需要保持毫秒级的响应精度——这种极端可靠性背后,是AEC-Q系列认证标准构筑的质量防线。作为…...

5G网络规划避坑指南:PRACH时频资源配置详解与常见配置错误排查
5G网络规划避坑指南:PRACH时频资源配置详解与常见配置错误排查 在5G网络部署与优化过程中,随机接入信道(PRACH)的配置直接影响终端接入成功率与用户体验。许多网络性能问题,如高接入延迟、频繁接入失败,往往…...
的进阶指南)
【Linux】深入理解进程调度:从nice值到实时优先级(RT Priority)的进阶指南
1. Linux进程调度基础:从nice值说起 第一次接触Linux进程调度时,我被那个叫"nice值"的概念搞懵了。为什么用"nice"这个词?后来才明白,这个命名其实很形象——越"nice"的进程越谦让,愿意…...

手把手教你部署M2FP:快速搭建人体部位识别服务
手把手教你部署M2FP:快速搭建人体部位识别服务 1. 引言:为什么选择M2FP进行人体解析? 在计算机视觉领域,人体解析(Human Parsing)是一项关键技术,它能够将图像中的人体划分为多个语义区域&…...

如何快速实现ngx-bootstrap国际化:多语言应用开发完整指南
如何快速实现ngx-bootstrap国际化:多语言应用开发完整指南 【免费下载链接】ngx-bootstrap Fast and reliable Bootstrap widgets in Angular (supports Ivy engine) 项目地址: https://gitcode.com/gh_mirrors/ng/ngx-bootstrap ngx-bootstrap作为Angular生…...

4个关键步骤:用vscode-ai-toolkit实现智能应用开发全流程
4个关键步骤:用vscode-ai-toolkit实现智能应用开发全流程 【免费下载链接】vscode-ai-toolkit 项目地址: https://gitcode.com/GitHub_Trending/vs/vscode-ai-toolkit AI Toolkit for Visual Studio Code是一款专为简化生成式AI应用开发设计的强大VS Code扩…...

Swagger2Word终极指南:从Swagger文档到专业Word接口文档的高效转换方案
Swagger2Word终极指南:从Swagger文档到专业Word接口文档的高效转换方案 【免费下载链接】swagger2word 项目地址: https://gitcode.com/gh_mirrors/swa/swagger2word Swagger2Word是一款专为开发团队设计的开源工具,能够将Swagger/OpenAPI接口文…...