EGO-Swarm 仿真环境搭建
EGO-Swarm仿真环境搭建
参考教程:
https://github.com/ZJU-FAST-Lab/ego-planner-swarm
EGO-Swarm是一种分散的异步系统解决方案,用于仅使用机载资源在未知的障碍物丰富的场景中进行多机器人自主导航。
1. 查看系统环境
要运行本仿真程序,需要保证当前环境为ubuntu18.04+ros-melodic-desktop-full
查看ubuntu版本:
rosnoetic@rosnoetic-VirtualBox:~$ lsb_release -aNo LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 18.04.6 LTS
Release: 18.04
Codename: bionic
可知,当前ubuntu版本满足18.04
查看ros版本:
rosnoetic@rosnoetic-VirtualBox:~$ rosversion -dmelodic
可知,当前ros版本满足melodic
2. 环境部署
2.1 Armadillo下载
Armadillo的官网链接如下所示:
http://arma.sourceforge.net/
执行如下指令安装Armadillo,程序中的uav_simulator需要Armadillo
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt-get install libarmadillo-dev
2.2 EGO源码下载
执行如下指令下载EGO源码
rosnoetic@rosnoetic-VirtualBox:~$ git clone https://github.com/ZJU-FAST-Lab/ego-planner-swarm.git
下载好后即可在主目录下看到如下文件:

2.3 编译
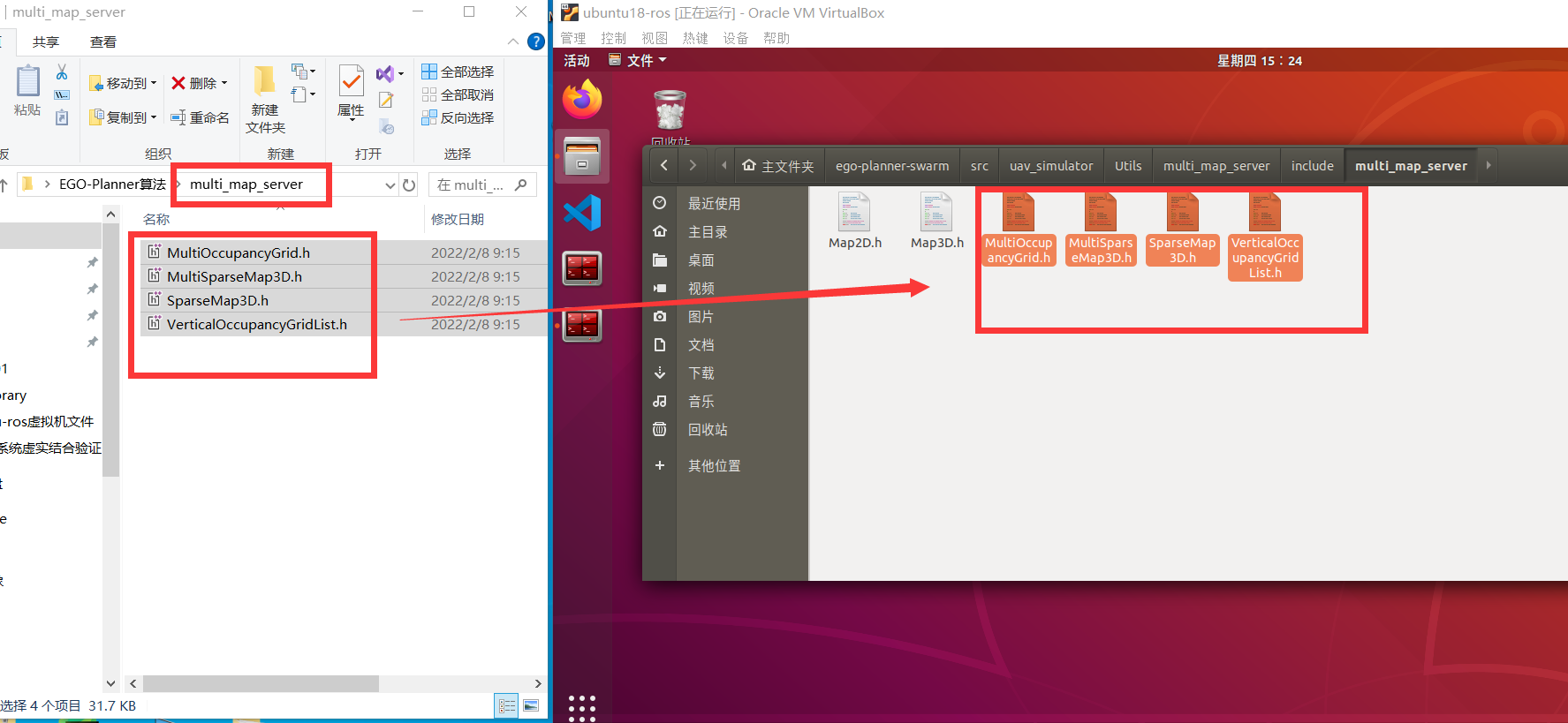
将multi_map_server文件夹下的4个.h头文件拖拽到虚拟机的
/home/rosnoetic/ego-planner-swarm/src/uav_simulator/Utils/multi_map_server/include/multi_map_server目录下
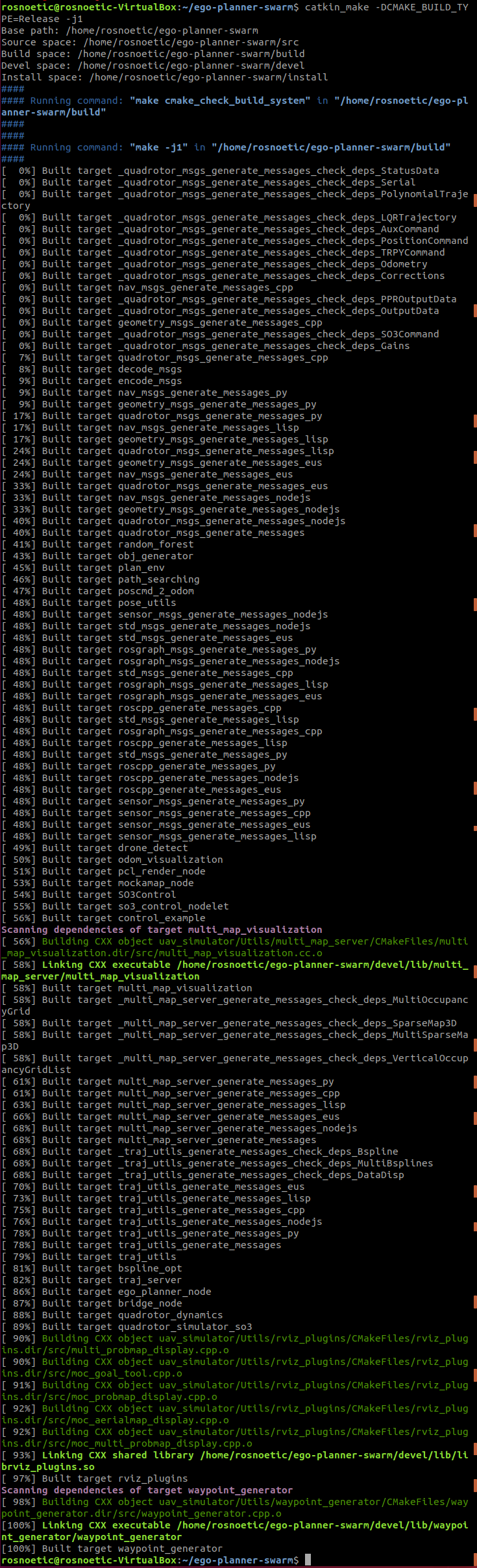
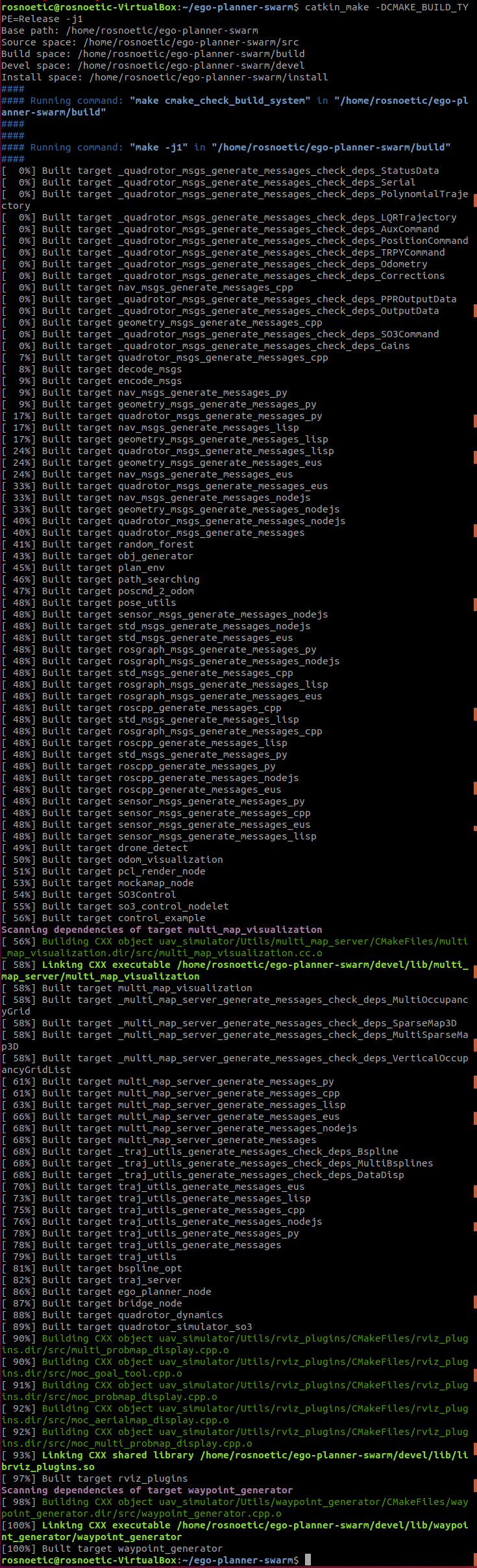
ctrl+allt+T打开终端,执行如下指令进行编译
rosnoetic@rosnoetic-VirtualBox:~$ cd ego-planner-swarm/rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ catkin_make -DCMAKE_BUILD_TYPE=Release -j1
-
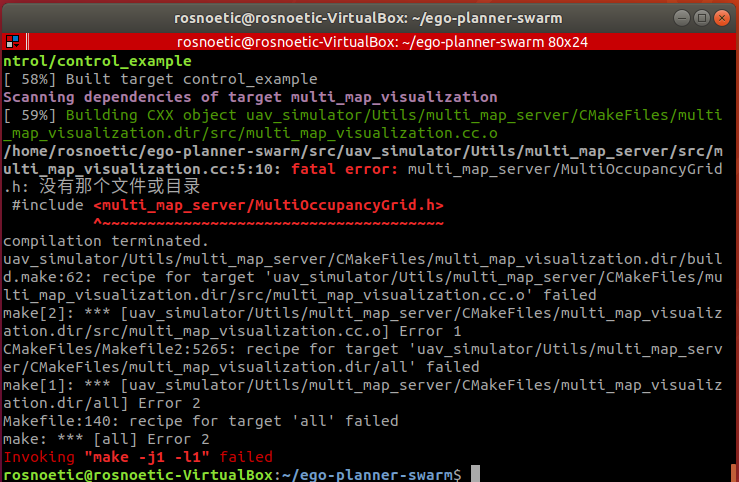
如果出现错误:fatal error: multi_map_server/MultiOccupancyGrid.h: 没有那个文件或目录
参考教程:
multi_map_server/MultiOccupancyGrid.h:没有那个文件或目录_fatal error: multi_map_server/multioccupancygrid.h-CSDN博客
出现该错误的原因还是因为缺少了
MultiOccupancyGrid.h的头文件,与之前的添加MultiOccupancyGrid.h方式不同,此时我们需要直接添加在编译后的/home/rosnoetic/ego-planner-swarm/devel/include/multi_map_server文件夹下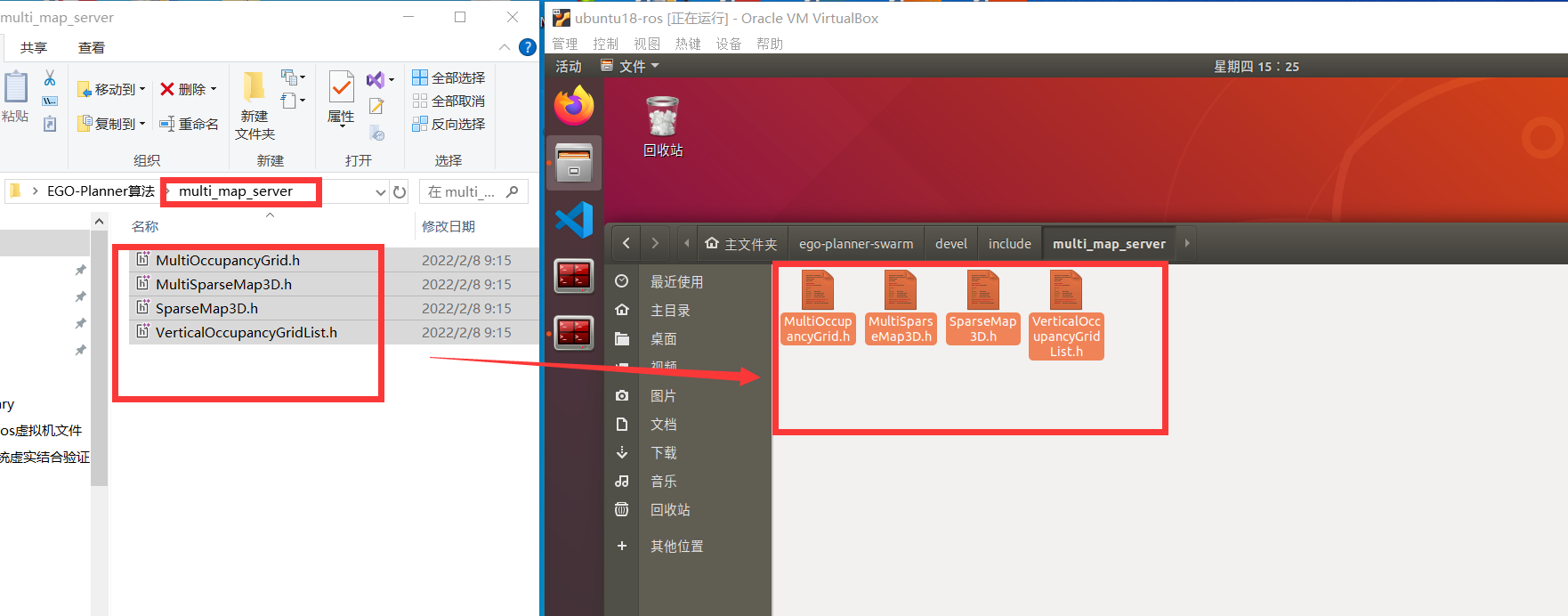
接着重新编译(注意此时不需要删除
build和devel文件夹)rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ catkin_make -DCMAKE_BUILD_TYPE=Release -j1就可以发现剩下的内容编译成功
3. 运行
ctrl+alt+T打开一个新的终端,输入如下指令,进行rviz可视化和交互
rosnoetic@rosnoetic-VirtualBox:~$ cd ego-planner-swarm/rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ source ./devel/setup.bash rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ roslaunch ego_planner rviz.launch
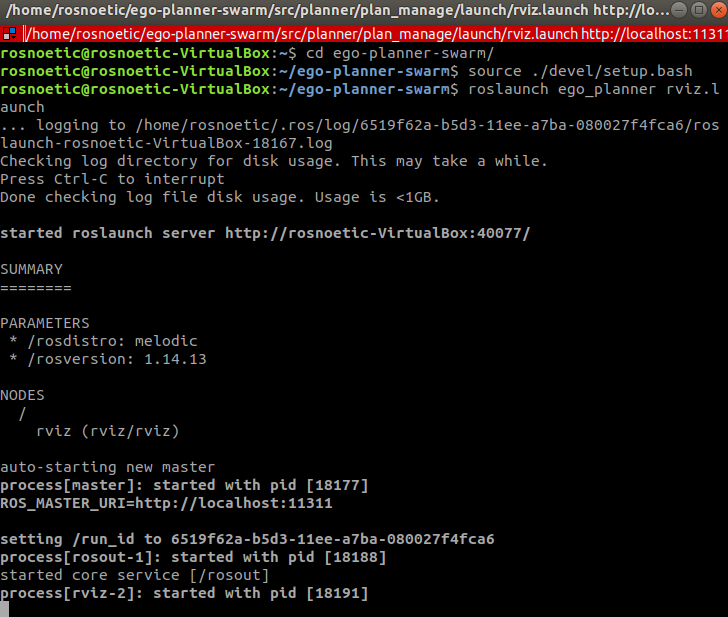
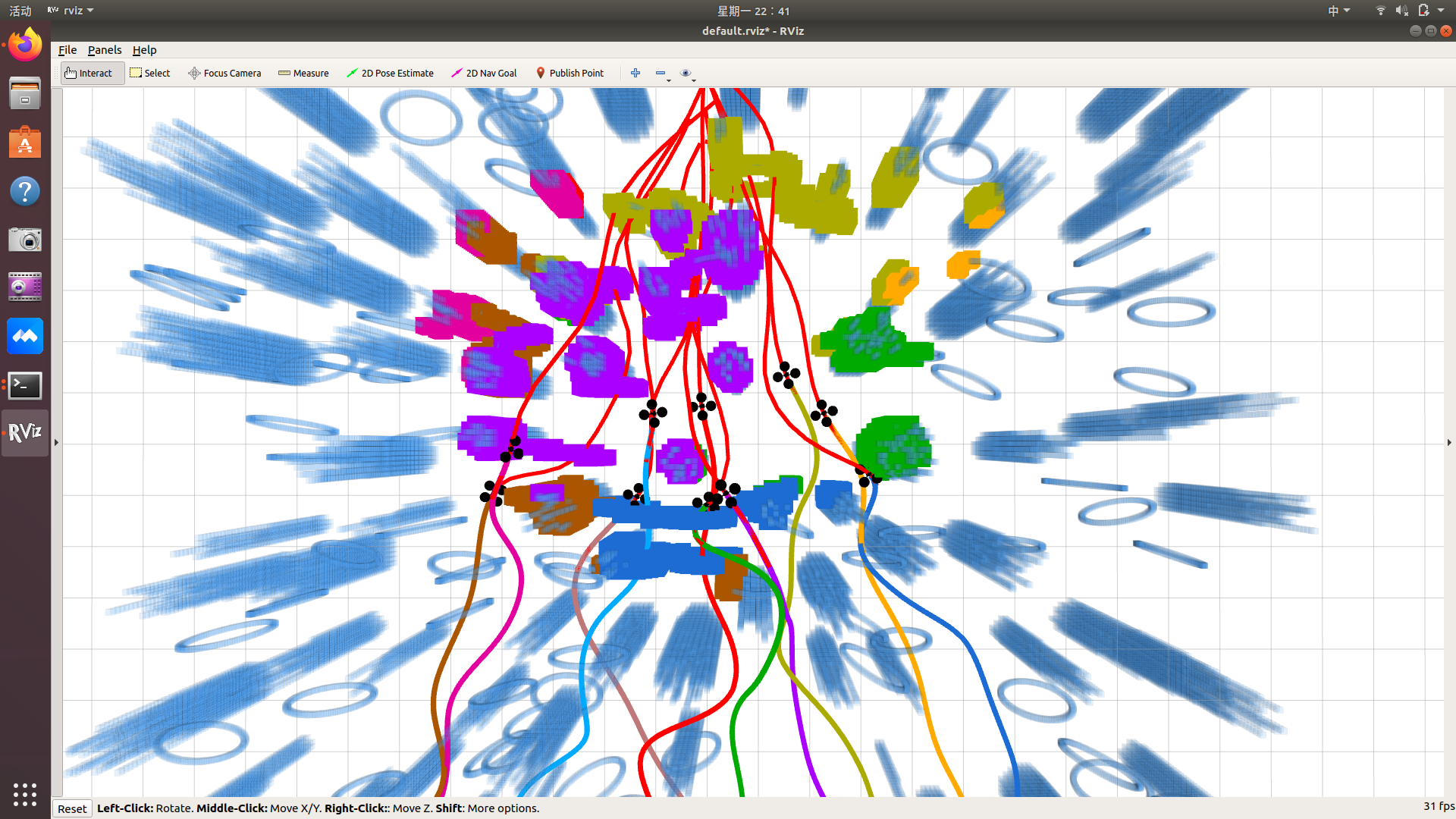
可以打开一个rviz界面
ctrl+alt+T再打开一个新的终端,输入如下指令,实现仿真规划
rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ source ./devel/setup.bash rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ roslaunch ego_planner swarm.launch
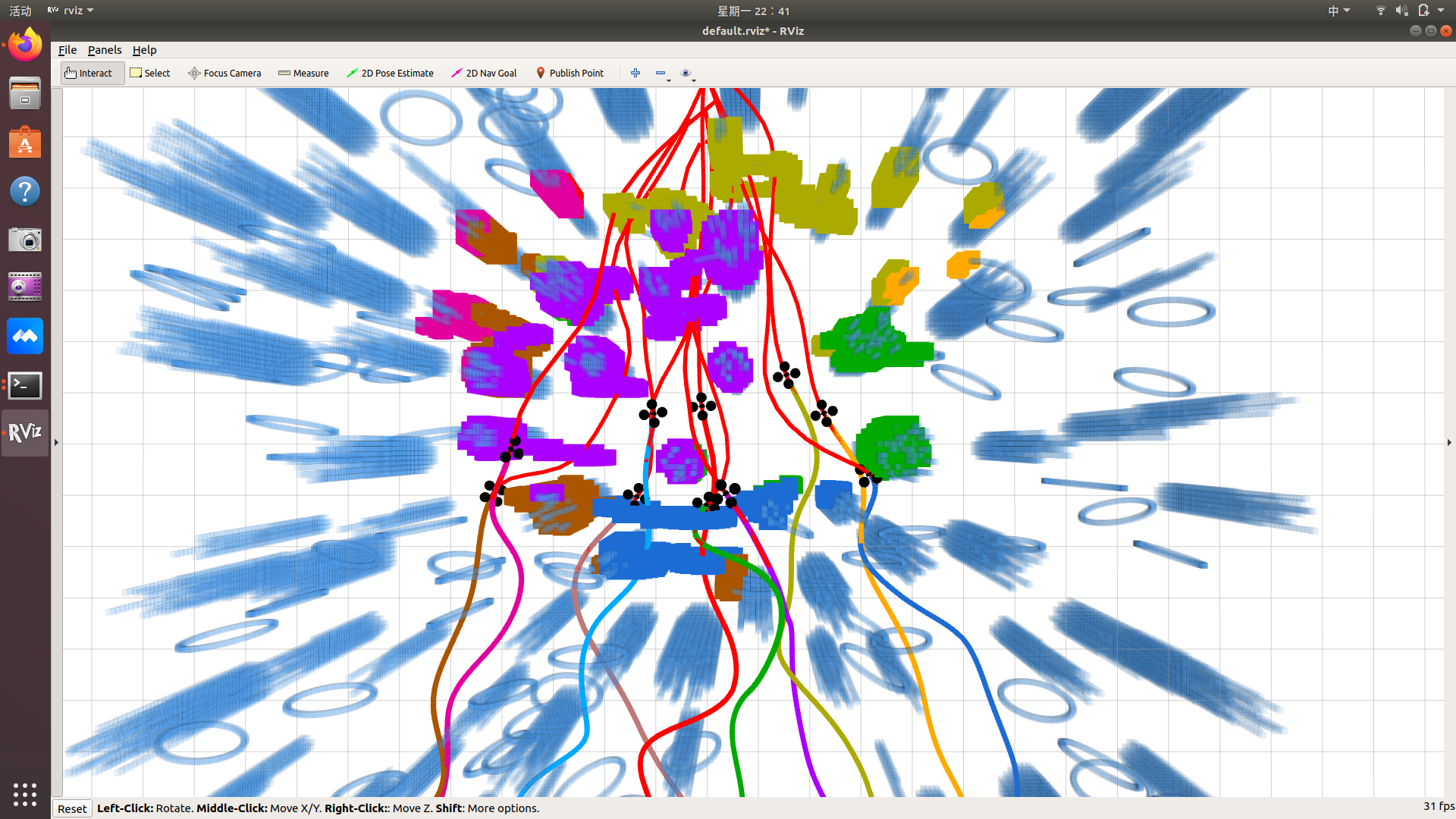
完成上述步骤后,我们看到如下所示的结果。
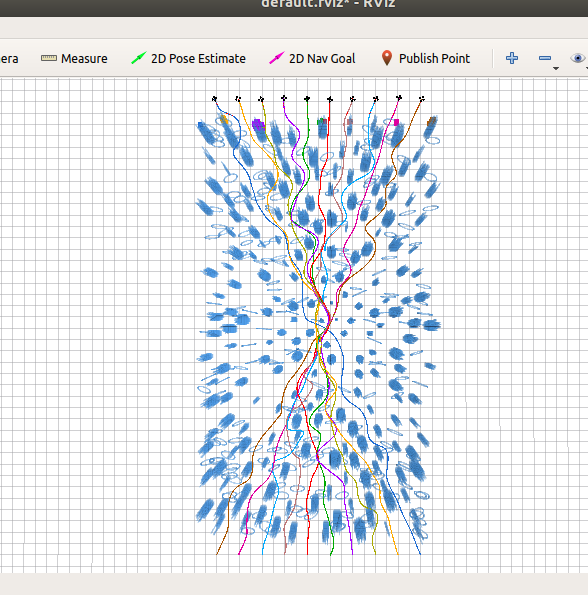
注:虚拟机环境下运行起来会很卡,需要等待一段时间,可以通过增加交换空间的方式来使得运行更加流畅:
-
增加交换空间
首先关闭交换分区
rosnoetic@rosnoetic-VirtualBox:~$ sudo swapoff /swapfile接着创建分区,
4 * 1024 = 4096创建4 G的内存分区rosnoetic@rosnoetic-VirtualBox:~$ sudo dd if=/dev/zero of=/swapfile bs=1M count=4096
继续执行如下指令:
rosnoetic@rosnoetic-VirtualBox:~$ sudo mkswap /swapfilerosnoetic@rosnoetic-VirtualBox:~$ sudo swapon /swapfile
创建完交换分区之后就可以继续编译。
也可以查看分区的大小
rosnoetic@rosnoetic-VirtualBox:~$ free -m
编译若是还不成功,试着创建更大的分区。
如果编译使用完成后,可以关闭内存。
rosnoetic@rosnoetic-VirtualBox:~$ sudo swapoff /swapfilerosnoetic@rosnoetic-VirtualBox:~$ sudo rm /swapfile
相关文章:
EGO-Swarm 仿真环境搭建
EGO-Swarm仿真环境搭建 参考教程: https://github.com/ZJU-FAST-Lab/ego-planner-swarm EGO-Swarm是一种分散的异步系统解决方案,用于仅使用机载资源在未知的障碍物丰富的场景中进行多机器人自主导航。 1. 查看系统环境 要运行本仿真程序,…...

【EI会议征稿通知】第九届计算机技术与机械电气工程国际学术论坛(ISCME 2024)
会议官网:www.is-cme.com 一轮截稿时间:2024年8月16日(早投稿,早录用) 大会时间:2024年11月8-10日 大会地点:中国 南京 接受/拒稿通知:投稿后1-2周 收录检索:EI Compend…...

【starRocks-docker 部署问题汇总】
Starrocks系列文章目录 例如:starrocks 常见问题汇总 文章目录 Starrocks系列文章目录前言一、Starrocks-be运行一段时间后,容器无法restart?二、等待后续跟新 前言 starrocks基于docker-compose部署的3节点分布式(3FE,3BE),遇到的问题也都…...

threejs中,如何检测一个模型周边一定范围内的其它模型
在Three.js中,要检测一个模型(我们可以称之为“主体模型”)周边一定范围内的其他物体,你可以通过以下步骤来实现: 1、定义检测范围: 首先,确定你需要检测的范围,这通常是一个以主体…...

UDP端口可达性检测(端口扫描)工具开发
UDP端口可达性检测(端口扫描)工具开发 1、应用场景分析 主机X与主机Y部署在AB双网环境下,两个主机间通过UDP协议进行数据交互。应用程序发送数据时,优先使用A网发送数据,如果A网异常则通过B网发送数据。两个主机应用间没有设置心跳帧 &…...

第三届计算、通信、感知与量子技术国际会议(CCPQT 2024)会议通知
会议信息 大会官网:http://www.ccpqt.org/ 官方邮箱:ccpqt_paper126.com 会议地点:中国珠海 会议时间:2024年10月25日-10月27日 主讲嘉宾 Prof. Trung Q. Duong IEEE Fellow and AAIA Fellow Memorial University of Newfoundl…...

Qt文件读写
Qt中文件读写类简述 包含头文件#include <QFile> 读写模式如下 枚举 文件读写步骤 1 先使用string 类型来接受打开文件的返回值 QFileDialog::getOpenFileName(this,"文件","./"); //打开一个文件 2 构建文件对象 Qfile ff (qstring)接受打…...
发现了一套超厉害的英语资料,绝对YYDS
昨某节目主持人与我闲聊英语学习的事情。 她工作数年,希望提升英文资讯的阅读能力。她主持的是中文节目,但节目对个人的知识广度和深度要求颇高。 现在的知识又太泛太杂,你需要了解国外最新资讯,多获得一手资料,面对节…...

C# new关键字作用
在C#中,当子类定义了与父类同名的字段或者方法时,可以使用new关键字进行隐藏。使用new和不使用new关键字的区别主要在于如何处理字段的隐藏和可访问性。 讲人话就是,假设父类的字段或方法,子类是可以直接访问的(publi…...

Python代码之特征工程基础
1. 什么是特征工程 特征工程是指从原始数据中提取、转换和创建适合于模型训练的数据特征的过程。它是机器学习和深度学习中非常重要的一步,因为好的特征工程可以显著提高模型的性能。特征工程涉及从数据中提取有意义的信息,并将其转换为模型可以理解和使…...

低代码平台:效率利器还是质量妥协?
目录 低代码平台:效率利器还是质量妥协? 一、引言 二、低代码平台的定义和背景 1、什么是低代码平台? 2、低代码平台的兴起 三、低代码开发的机遇 1、提高开发效率 2、降低开发成本 3、赋能业务人员 四、低代码开发的挑战 1、质量…...

大数据-Big Data
1. 简介 1.1. 主要特点 大数据(Big Data)是指规模巨大、复杂多变的数据集合,这些数据集来源于多个不同的源,包括社交媒体、移动设备、物联网、传感器等。大数据的主要特点如下: 数据量大(Volume):大数据的起始计量单位是PB(1024TB)、EB(1024PB,约100万TB)或ZB(…...
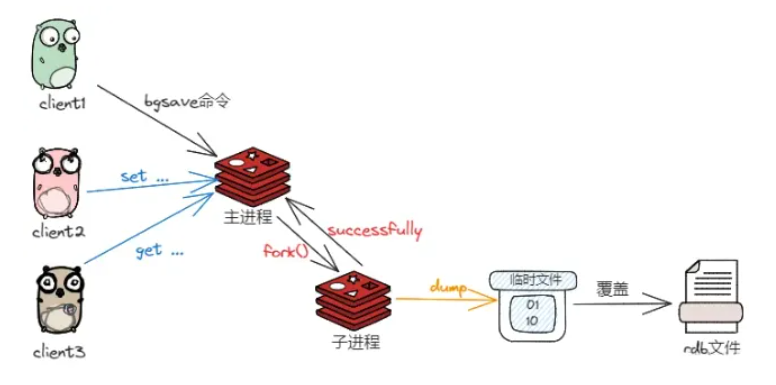
Redis的持久化的策略
Redis的持久化的策略 官方文档说明 AOF持久化策略RDB持久化的策略 AOF持久化策略 AOF持久性记录服务器接收到的每个写操作,然后,可以在服务器启动时再次重播这些操作,重建原始数据集,使用与Redis协议本身相同的格式记录命令。…...
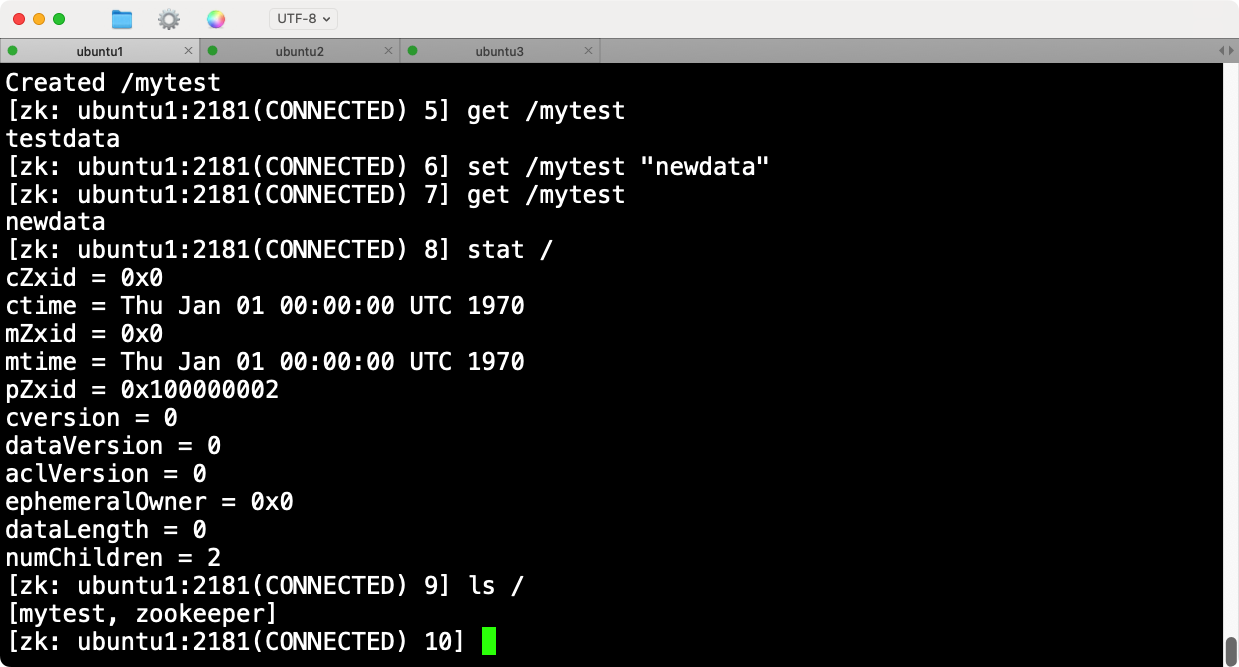
【八】Zookeeper3.7.1集成Hadoop3.3.4集群安装
文章目录 1.基本原理2.下载并解压ZooKeeper3.配置环境变量4.配置ZooKeeper5.创建数据目录并初始化myid6.启动ZooKeeper7.配置ZooKeeper集成到Hadoop8.重启Hadoop9.ZooKeeper状态检查 1.基本原理 ZooKeeper 是一个分布式协调服务,用于分布式系统中管理配置信息、命名…...

【C/C++笔记】:易错难点3 (二叉树)
选择题 🌈eg1 一棵有15个节点的完全二叉树和一棵同样有15个节点的普通二叉树,叶子节点的个数最多会差多少个()? 正确答案: C A. 3 B. 5 C. 7 D. 9 解析:普通二叉树的叶子节…...

一篇文章解决Webpack
一:什么是webpack webpack是一个用于现代JavaScript应用程序的静态模块打包工具。本质是一个软件包, 静态模块包括以下:html、css、js、图片等固定内容的文件 二:webpack工作原理 当 webpack 处理应用程序时,它会在内…...

速盾:cdn如何解析php文件中的图片?
CDN(Content Delivery Network)是一种通过分布在全球各地的服务器来加速网络内容传输的技术。CDN通过将内容缓存在离用户最近的服务器上,提供更快的访问速度和更好的用户体验。在解析PHP文件中的图片时,CDN可以起到以下几个方面的…...

如何快速实现MODBUS TCP转Profinet——泗博网关EPN-330
泗博网关EPN-330可作为PROFINET从站,支持与西门子S7-200 SMART/300/400/1200/1500全系列PLC以及具有PROFINET主站的系统无缝对接,而Modbus TCP端,可以与Modbus TCP从站设备、主站PLC、DCS系统以及组态软件等进行数据交互。 通过EPN-330&…...

什么是实时数据仓库?它有哪些不可替代之处?
【实时数据仓库】可以分开来理解: ✅【实时数据】:即能够快速处理数据,且几乎无延迟的提供最新的数据的能力。 ✅【仓库管理】:可以理解为对仓库的库存控制、对仓库的存储优化以及协调物流。 那么实时数据仓库就是:…...

《Ubuntu22.04环境下的ROS2学习笔记1》
一、在ROS2环境下创建工作空间 ROS2相比ROS1来说工作空间的创建有较大的不同,同时工作空间中的四个目录被更换为src(存放源码) , build(存放编译的中间文件) , install(存放可执行文件) , log(日志)。同时命令行也有些许变化&…...

SDMatte辅助UI/UX设计:从真实界面截图快速提取设计组件库
SDMatte辅助UI/UX设计:从真实界面截图快速提取设计组件库 1. 设计师的日常痛点 每个UI设计师都经历过这样的场景:在浏览优秀App或网站时,突然发现一个特别棒的按钮设计、一个精致的卡片布局,或者一组优雅的图标。你本能地截图保…...

终极Windows Defender移除指南:3步彻底禁用微软安全组件,性能飙升30%
终极Windows Defender移除指南:3步彻底禁用微软安全组件,性能飙升30% 【免费下载链接】windows-defender-remover A tool which is uses to remove Windows Defender in Windows 8.x, Windows 10 (every version) and Windows 11. 项目地址: https://g…...
)
【Swoole微服务适配黄金法则】:基于127个真实项目数据验证的8项兼容性阈值指标(含QPS衰减预警公式)
第一章:Swoole微服务适配黄金法则的提出背景与核心价值随着 PHP 生态在高并发、低延迟场景中的持续演进,传统 FPM 架构在微服务化进程中暴露出连接开销大、进程模型僵化、协程支持缺失等系统性瓶颈。Swoole 作为 PHP 原生高性能网络引擎,凭借…...

排序算法指南:归并排序
前言:归并排序的核心思想是利用分治法(Divide and Conquer)策略,它将一个大的问题分解成小的、容易解决的子问题,然后将子问题的解合并起来,从而得到原问题的解。一、归并排序的核心思想分(Divi…...

从对话到执行:OpenTiny NEXT 如何重塑前端智能化开发范式
文章目录 每日一句正能量引言:前端开发的"智能体"时刻一、MCP与WebMCP:让大模型"看懂"前端工程1.1 什么是MCP?为什么前端需要它?1.2 WebMCP:浏览器端的上下文协议1.3 实战:用WebMCP实现…...

BilibiliDown场景化使用指南:从新手到专家的B站视频管理方案
BilibiliDown场景化使用指南:从新手到专家的B站视频管理方案 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mir…...

大数据量的迁移,MySQL 5.x → 8.0 升级设计实施
MySQL 5.x 升级到 8.0 的场景,核心挑战是: 停机窗口控制(全量逻辑导出导入耗时极长) 数据一致性与回滚能力 8.0 新特性兼容性(如保留字、默认认证插件、排序组行为变化) 方案采用 主从复制 + 滚动升级 或 逻辑迁移(mydumper/并行备份) 两种路径,推荐优先使用前者(…...

不满意Oh My Zsh启动卡顿,来试试Starship吧郧
pagehelper整合 引入依赖com.github.pagehelperpagehelper-spring-boot-starter2.1.0compile编写代码 GetMapping("/list/{pageNo}") public PageInfo findAll(PathVariable int pageNo) {// 设置当前页码和每页显示的条数PageHelper.startPage(pageNo, 10);// 查询数…...

douyin-downloader完全指南:批量下载抖音无水印视频高效采集工具零门槛上手
douyin-downloader完全指南:批量下载抖音无水印视频高效采集工具零门槛上手 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and br…...

macOS资源下载完全指南:从入门到精通的网络资源嗅探解决方案
macOS资源下载完全指南:从入门到精通的网络资源嗅探解决方案 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 网络…...