三点确定圆心算法推导
已知a,b,c三点求过这三点的圆心坐标
a ( x 1 , y 1 ) a(x_1, y_1) a(x1,y1) 、 b ( x 2 , y 2 ) b(x_2, y_2) b(x2,y2) 、 c ( x 3 , y 3 ) c(x_3, y_3) c(x3,y3)
确认三点是否共线
叉积计算方式
v → ( X 1 , Y 1 ) × u → ( X 2 , Y 2 ) = X 1 Y 2 − X 2 Y 1 \overrightarrow{v}(X_1, Y_1) \times \overrightarrow{u}(X_2, Y_2) = X_1Y_2 - X_2Y_1 v(X1,Y1)×u(X2,Y2)=X1Y2−X2Y1
使用叉积判断三个点是否共线
a b → = ( ( x 2 − x 1 ) , ( y 2 − y 1 ) ) a c → = ( ( x 3 − x 1 ) , ( y 3 − y 1 ) ) \overrightarrow{ab} = ((x_2- x_1) , (y_2- y_1)) \\ \overrightarrow{ac} = ((x_3- x_1) , (y_3- y_1)) ab=((x2−x1),(y2−y1))ac=((x3−x1),(y3−y1))
带入上方可到的:
v a l u e = ( x 2 − x 1 ) ( y 3 − y 1 ) − ( x 3 − x 1 ) ( y 2 − y 1 ) v a l u e = x 2 y 3 − x 2 y 1 − x 1 y 3 + x 1 y 1 − x 3 y 2 + x 3 y 1 + x 1 y 2 − x 1 y 1 \begin{aligned} value &= (x_2 - x_1)(y_3 - y_1) - (x_3 - x_1)(y_2 - y_1) \\ value &= x_2y_3 - x_2y_1-x_1y_3+x_1y_1-x_3y_2+x_3y_1+x_1y_2-x_1y_1 \\ \end{aligned} valuevalue=(x2−x1)(y3−y1)−(x3−x1)(y2−y1)=x2y3−x2y1−x1y3+x1y1−x3y2+x3y1+x1y2−x1y1
整合后得到
v a l u e = x 1 ( y 2 − y 3 ) + x 2 ( y 3 − y 1 ) + x 3 ( y 1 − y 2 ) value = x_1(y_2-y_3)+x_2(y_3-y_1)+x_3(y_1-y_2) value=x1(y2−y3)+x2(y3−y1)+x3(y1−y2)
{ v a l u e < 0 点 b 在 a c → 右边 v a l u e > 0 点 b 在 a c → 左边 v a l u e = 0 三点共线 \begin{cases} value & < 0 &点b在\overrightarrow{ac}右边\\ value & > 0 &点b在\overrightarrow{ac}左边\\ value & = 0 &三点共线 \\ \end{cases} ⎩ ⎨ ⎧valuevaluevalue<0>0=0点b在ac右边点b在ac左边三点共线
不共线的三点才可以确认一个圆
三点求解圆心
已知圆的方程为
( x − x 0 ) 2 + ( y − y 0 ) 2 = r 2 (x-x_0)^2+(y-y_0)^2=r^2 (x−x0)2+(y−y0)2=r2
假设圆心坐标为 O ( a , b ) O(a,b) O(a,b)带入三点可以得到下列方程
{ ( x 1 − a ) 2 + ( y 1 − b ) 2 = r 2 ① ( x 2 − a ) 2 + ( y 2 − b ) 2 = r 2 ② ( x 3 − a ) 2 + ( y 3 − b ) 2 = r 2 ③ \begin{cases} (x_1 - a)^2+(y_1 - b)^2=r^2 &①\\ (x_2 - a)^2+(y_2 - b)^2=r^2 &②\\ (x_3 - a)^2+(y_3 - b)^2=r^2 &③\\ \end{cases} ⎩ ⎨ ⎧(x1−a)2+(y1−b)2=r2(x2−a)2+(y2−b)2=r2(x3−a)2+(y3−b)2=r2①②③
拆解后可得
{ x 1 2 − 2 x 1 a + a 2 + y 1 2 − 2 y 1 b + b 2 = r 2 ① x 2 2 − 2 x 2 a + a 2 + y 2 2 − 2 y 2 b + b 2 = r 2 ② x 3 2 − 2 x 3 a + a 2 + y 3 2 − 2 y 3 b + b 2 = r 2 ③ \begin{cases} x_1^2 - 2x_1a+a^2 + y_1^2-2y_1b+b^2=r^2 &①\\ x_2^2 - 2x_2a+a^2 + y_2^2-2y_2b+b^2=r^2 &②\\ x_3^2 - 2x_3a+a^2 + y_3^2-2y_3b+b^2=r^2 &③\\ \end{cases} ⎩ ⎨ ⎧x12−2x1a+a2+y12−2y1b+b2=r2x22−2x2a+a2+y22−2y2b+b2=r2x32−2x3a+a2+y32−2y3b+b2=r2①②③
使用①-②,②-③。构造两个方程组
{ a ( x 2 − x 1 ) + b ( y 2 − y 1 ) = ( x 2 2 + y 2 2 ) − ( x 1 2 + y 1 2 ) 2 ① − ② a ( x 3 − x 2 ) + b ( y 3 − y 2 ) = ( x 3 2 + y 3 2 ) − ( x 2 2 + y 2 2 ) 2 ② − ③ \begin{cases} a(x_2-x_1)+b(y_2-y_1)=\frac{(x_2^2+y_2^2)-(x_1^2+y_1^2)}{2} &①-②\\ a(x_3-x_2)+b(y_3-y_2)=\frac{(x_3^2+y_3^2)-(x_2^2+y_2^2)}{2} &②-③\\ \end{cases} {a(x2−x1)+b(y2−y1)=2(x22+y22)−(x12+y12)a(x3−x2)+b(y3−y2)=2(x32+y32)−(x22+y22)①−②②−③
我们可以给计算方程简化一下
A 1 = x 2 − x 1 B 1 = y 2 − y 1 A 2 = x 3 − x 2 B 2 = y 3 − y 2 C 1 = ( x 2 2 + y 2 2 ) − ( x 1 2 + y 1 2 ) 2 C 2 = ( x 3 2 + y 3 2 ) − ( x 2 2 + y 2 2 ) 2 \begin{aligned} A_1 &= x_2-x_1 \\ B_1 &= y_2-y_1 \\ A_2 &= x_3-x_2 \\ B_2 &= y_3-y_2 \\ C_1 &= \frac{(x_2^2+y_2^2)-(x_1^2+y_1^2)}{2} \\ C_2 &= \frac{(x_3^2+y_3^2)-(x_2^2+y_2^2)}{2} \\ \end{aligned} A1B1A2B2C1C2=x2−x1=y2−y1=x3−x2=y3−y2=2(x22+y22)−(x12+y12)=2(x32+y32)−(x22+y22)
则可的方程组
A 1 a + B 1 b = C 1 A 2 a + B 2 b = C 2 A_1a+B_1b=C_1 \\ A_2a+B_2b=C_2 \\ A1a+B1b=C1A2a+B2b=C2
使用矩阵求解这个方程组
( A 1 B 1 A 2 B 2 ) ( a b ) = ( C 1 C 2 ) \begin{pmatrix} A_1 & B_1 \\ A_2 & B_2 \\ \end{pmatrix} \begin{pmatrix} a \\ b \\ \end{pmatrix} = \begin{pmatrix} C_1 \\ C_2 \\ \end{pmatrix} (A1A2B1B2)(ab)=(C1C2)
可得
( a b ) = 1 A 1 B 2 − A 2 B 1 ( B 2 − B 1 − A 2 A 1 ) ( C 1 C 2 ) \begin{pmatrix} a \\ b \\ \end{pmatrix} = \frac{1}{ A_1B_2-A_2B_1 } \begin{pmatrix} B_2 & -B_1 \\ -A_2 & A_1 \\ \end{pmatrix} \begin{pmatrix} C_1 \\ C_2 \\ \end{pmatrix} (ab)=A1B2−A2B11(B2−A2−B1A1)(C1C2)
( a b ) = ( B 2 A 1 B 2 − A 2 B 1 − B 1 A 1 B 2 − A 2 B 1 − A 2 A 1 B 2 − A 2 B 1 A 1 A 1 B 2 − A 2 B 1 ) ( C 1 C 2 ) = ( B 2 C 1 − B 1 C 2 A 1 B 2 − A 2 B 1 A 1 C 2 − A 2 C 1 A 1 B 2 − A 2 B 1 ) \begin{pmatrix} a \\ b \\ \end{pmatrix} = \begin{pmatrix} \frac{B_2}{A_1B_2-A_2B_1} & \frac{-B_1}{A_1B_2-A_2B_1} \\ \frac{-A_2}{A_1B_2-A_2B_1} & \frac{A_1}{A_1B_2-A_2B_1} \\ \end{pmatrix} \begin{pmatrix} C_1 \\ C_2 \\ \end{pmatrix} = \begin{pmatrix} \frac{B_2C_1-B_1C_2}{A_1B_2-A_2B_1}\\ \frac{A_1C_2-A_2C_1}{A_1B_2-A_2B_1}\\ \end{pmatrix} (ab)=(A1B2−A2B1B2A1B2−A2B1−A2A1B2−A2B1−B1A1B2−A2B1A1)(C1C2)=(A1B2−A2B1B2C1−B1C2A1B2−A2B1A1C2−A2C1)
这样我们就得到了圆心 O ( a , b ) O(a,b) O(a,b)的坐标,同时我们也发现了一个很奇特的现象
上面再做共线条判断的时候我们求了叉积
v a l u e = x 1 ( y 2 − y 3 ) + x 2 ( y 3 − y 1 ) + x 3 ( y 1 − y 2 ) value = x_1(y_2-y_3)+x_2(y_3-y_1)+x_3(y_1-y_2) value=x1(y2−y3)+x2(y3−y1)+x3(y1−y2)
而我们求解的a,b的分母我带入后会发现
A 1 B 2 − A 2 B 1 = x 1 ( y 2 − y 3 ) + x 2 ( y 3 − y 1 ) + x 3 ( y 1 − y 2 ) A_1B_2-A_2B_1 = x_1(y_2-y_3)+x_2(y_3-y_1)+x_3(y_1-y_2) A1B2−A2B1=x1(y2−y3)+x2(y3−y1)+x3(y1−y2)
是不是很玄学hhhhh,有知道原理的大佬欢迎评论区解答。
代码实现
typedef struct _GL2_fPoint {float x;float y;
} GL2_fPoint;// 计算通过三点的圆的圆心和半径
bool circle_from_three_points(const GL2_fPoint& p1, const GL2_fPoint& p2, const GL2_fPoint& p3, float& cx, float& cy, float& r) {float x1 = p1.x, y1 = p1.y;float x2 = p2.x, y2 = p2.y;float x3 = p3.x, y3 = p3.y;float A = x1 * (y2 - y3) + x2 * (y3 - y1) + x3 * (y1 - y2);if (std::abs(A) < 1e-6f) {return false;}float B = (x1 * x1 + y1 * y1) * (y3 - y2) + (x2 * x2 + y2 * y2) * (y1 - y3) + (x3 * x3 + y3 * y3) * (y2 - y1);float C = (x1 * x1 + y1 * y1) * (x2 - x3) + (x2 * x2 + y2 * y2) * (x3 - x1) + (x3 * x3 + y3 * y3) * (x1 - x2);float D = (x1 * x1 + y1 * y1) * (x3 * y2 - x2 * y3) + (x2 * x2 + y2 * y2) * (x1 * y3 - x3 * y1) + (x3 * x3 + y3 * y3) * (x2 * y1 - x1 * y2);cx = -B / (2 * A);cy = -C / (2 * A);r = std::sqrt((x1 - cx) * (x1 - cx) + (y1 - cy) * (y1 - cy));return true;
}
相关文章:

三点确定圆心算法推导
已知a,b,c三点求过这三点的圆心坐标 a ( x 1 , y 1 ) a(x_1, y_1) a(x1,y1) 、 b ( x 2 , y 2 ) b(x_2, y_2) b(x2,y2) 、 c ( x 3 , y 3 ) c(x_3, y_3) c(x3,y3) 确认三点是否共线 叉积计算方式 v → ( X 1 , Y 1 ) u → ( X 2 , Y 2 ) X 1 Y 2 − X 2 Y 1 \…...

神经网络 (NN) TensorFlow Playground在线应用程序
神经网络 (NN) 历史上最重要的发现之一是神经网络 (NN) 的强大功能。 在神经网络中,称为神经元的许多数据层被添加在一起或相互堆叠以计算新的数据级别。 常用的简称: DNN 深度神经网络CNN 卷积神经网络RNN 循环神经网络 神经元 科学家一致认为&am…...

腾讯课堂 离线m3u8.sqlite转成视频
为了广大腾讯课堂用户对于购买的课程不能正常离线播放,构成知识付费损失,故出此文档。 重点:完全免费!!!完全免费!!!完全免费!!! 怎么…...

Linux多路转接
文章目录 IO模型多路转接select 和 pollepoll IO模型 在还在学习语言的阶段,C里使用cin,或者是C使用scanf的时候,总是要等着我们输入数据才执行,这种IO是阻塞IO。下面是比较正式的说法。 阻塞IO: 在内核将数据准备好之前…...

IDEA导入Maven项目的流程配置以常见问题解决
1. 前言 本文主要围绕着在IDEA中导入新Maven项目后的配置及常见问题解决来展开说说。相关的部分软件如下: IntelliJ IDEA 2021.1JDK 1.8Window 2. 导入Maven项目及配置 2.1 导入Maven项目 下面介绍了直接打开本地项目和导入git上的项目两种导入Maven方式。 1…...

【数据分析---- Pandas进阶指南:核心计算方法、缺失值处理及数据类型管理】
前言: 💞💞大家好,我是书生♡,本阶段和大家一起分享和探索数据分析,本篇文章主要讲述了:Pandas进阶指南:核心计算方法、缺失值处理及数据类型管理等等。欢迎大家一起探索讨论&#x…...

2024世界机器人大会将于8月21日至25日在京举行
2024年的世界机器人大会预定于8月21日至25日,在北京经济技术开发区的北人亦创国际会展中心隆重举办。 本届大会以“共育新质生产力 共享智能新未来”为核心主题,将汇聚来自全球超过300位的机器人行业专家、国际组织代表、杰出科学家以及企业家࿰…...

【Linux】lvm被删除或者lvm丢失了怎么办
模拟案例 接下来模拟lvm误删除如何恢复的案例: 模拟删除: 查看vg名: vgdisplayvgcfgrestore --list uniontechos #查看之前的操作 例如我删除的,现场没有删除就用最近的操作文件: 还原: vgcfgrestore…...

疫情防控管理系统
摘 要 由于当前疫情防控形势复杂,为做好学校疫情防控管理措施,根据上级防疫部门要求,为了学生的生命安全,要求学校加强疫情防控的管理。为了迎合时代需求,优化管理效率,各种各样的管理系统应运而生&#x…...

永久删除的Android 文件去哪了?在Android上恢复误删除的消息和照片方法?
丢失重要消息和照片可能是一种令人沮丧的经历,尤其是在您没有备份的情况下。但别担心,在本教程中,我们将指导您完成在Android设备上恢复已删除消息和照片的步骤。无论您是不小心删除了它们还是由于软件问题而消失了,这些步骤都可以…...
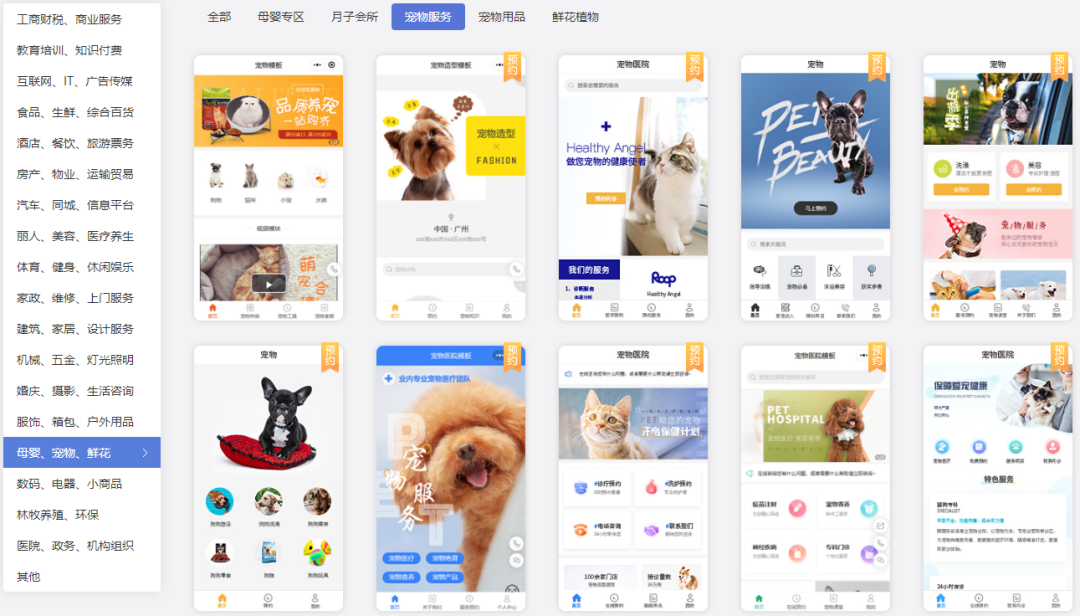
宠物服务小程序多生态转化
宠物服务如美容造型、医疗、看护寄养等有着不少需求,尤其是年轻人从宠物生活到饮食起居等面面俱到,往往不惜金钱给到较好的环境,如定时除虫、优质食物、玩具、检查身体、服饰; 近些年宠物服务店新开数量也较多,同行竞…...

今天细说一下工业制造行业MES系统
文章目录 前言什么是MES? 前言 最近几个月在做制造行业的MES系统开发,这类面向制造业的系统是今年做的第三个系统了,也算是了解较深的了,和一个之前转行做这一块的朋友聊了聊,他们集团要扩大规模,准备招ME…...
)
C++ 知识点(长期更新)
C++ 知识点 C/C++1. `cin`, `cin.get()`, `getchar()`, `getline()`, 和 `cin.getline()`的区别。2. 有关 cin >>3. 定义和声明的区别4. `union`、`struct`和`class`的区别5. 深拷贝 vs 浅拷贝6. new 和 malloc 的区别7. 被free回收的内存是立即返还给操作系统吗?为什么…...

Spring AI + 通义千问 入门学习
Spring AI 通义千问 入门学习 文章目录 Spring AI 通义千问 入门学习一,开发环境配置二,项目搭建2.1 pom文件2.2 配置文件 三,AI使用3.1 对话问答3.1.1 普通方式3.1.2 流方式 3.2 文字生成图片 最近AI很火,而Spring也出了Spring…...

38.【C语言】指针(重难点)(C)
目录: 8.const 修饰指针 *修饰普通变量 *修饰指针变量 9.指针运算 *指针或-整数 *指针-指针 *指针关系运算 往期推荐 承接上篇37.【C语言】指针(重难点)(B) 8.const 修饰指针 const 全称 constant adj.不变的 *修饰普通变量 #…...

Vue-05.指令-v-for
v-for 列表渲染,遍历容器的元素或者对象的属性 v-for“列表元素名 in 列表名” <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-wi…...

自动驾驶的一些大白话讲解
无人驾驶牛逼吗?我来帮你祛魅【原理缺陷解析】_哔哩哔哩_bilibili 5分钟讲明白自动驾驶端到端,解释为什么华为智驾并不是遥遥领先 到底什么是端到端自动驾驶系统?为何我会说这是智能驾驶的弯道超车机会?我希望今天用5分钟的时间&…...

Python学习笔记--参数
目录 实参与形参 不定长参数 拆分参数列表 返回值 实参与形参 1. 定义函数时,带默认值的形参必须放在不带默认值的形参后面 下面程序的输出结果是( )。 def StudentInfo(country中国,name): print(%s,%s%(name,country)…...

刷题——大数加法
大数加法_牛客题霸_牛客网 string solve(string s, string t) {if(s.size() < t.size()) return solve(t, s);reverse(s.begin(), s.end());reverse(t.begin(), t.end());string ans;int d 0;//进位制for(int i0; i < s.size(); i){d s[i] - 0;//取得数字值if(i < …...
Pytorch人体姿态骨架生成图像
ControlNet是一个稳定扩散模型,可以复制构图和人体姿势。ControlNet解决了生成想要的确切姿势困难的问题。 Human Pose使用OpenPose检测关键点,如头部、肩膀、手的位置等。它适用于复制人类姿势,但不适用于其他细节,如服装、发型和…...

Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 [特殊字符]
Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 😎 【免费下载链接】Ventoy A new bootable USB solution. 项目地址: https://gitcode.com/GitHub_Trending/ve/Ventoy 还在为每次安装系统都要重新制作启动盘而烦恼吗&#x…...

Shiro RememberMe反序列化漏洞深度解析与实战利用
1. 这个漏洞不是“老古董”,而是理解Java安全边界的活教材很多人看到CVE-2016-4437,第一反应是“Shiro都淘汰了,还讲这个干啥?”——我去年在给一家做政企内部系统的客户做渗透复测时,就遇到过一个上线三年的审批平台&…...
—东方仙盟)
酒店门锁V10SDK接口说明-幽冥大陆(一百23)—东方仙盟
相关文件系统环境C# :NET.20,NET3.5,NET4,NET4.5,NET 5.0C:VS2005,VS2012,VS2015操作系统:未来之窗VOSWEB:CHROME43核心代码完整代码using System; using System.Collections.Generic; using System.Text; using System.Collections.Specialized;using System.Windo…...

古戏台构件声学特性的时域有限差分方法【附模型】
✨ 长期致力于时域有限差分法、窑洞、戏台、八字墙、共形技术研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)曲面共形网格快速生成算法: …...

Redis沙盒体验:在浏览器中零门槛掌握NoSQL核心技能
Redis沙盒体验:在浏览器中零门槛掌握NoSQL核心技能 【免费下载链接】try.redis A demonstration of the Redis database. 项目地址: https://gitcode.com/gh_mirrors/tr/try.redis 当你第一次听说Redis时,是否被那些晦涩的技术术语吓退࿱…...

告别虚频困扰:用VASP+DynaPhoPy搞定高温材料声子谱的保姆级教程
高温材料声子谱计算实战:从虚频困境到非谐解决方案 引言:虚频问题的根源与突破路径 在计算材料学领域,声子谱分析是理解材料动力学稳定性和热力学性质的核心手段。然而许多研究者都遭遇过这样的困境:对实验合成的材料进行简谐近似…...

FeHelper前端助手:30+开发工具集,让你的浏览器变身效率神器
FeHelper前端助手:30开发工具集,让你的浏览器变身效率神器 【免费下载链接】FeHelper 😍FeHelper--Web前端助手(Awesome!Chrome & Firefox & MS-Edge Extension, All in one Toolbox!) 项目地址:…...

AI写的论文双率如何压到20%以下?这几款工具实测有效
毕业季、投稿季用AI写论文已经成为不少人的高效选择,但查重率飘红、AIGC疑似率超标两大问题,让很多人犯了难。2026年学术检测标准持续收紧,知网、维普及主流AIGC检测系统同步上线双检规则,两项指标均控制在20%以下才符合基本提交要…...

电信运营商每月处理海量工单,如何不再出错?基于AI Agent的端到端自动化解决方案
在2026年的电信行业,海量工单处理已不再仅仅是效率问题,而是合规与生存的底线。随着2026年5月20日《电信和互联网服务 基础电信企业网上营业厅服务规范》国家标准的正式实施,监管层对“信息透明、流程闭环、计费精准”的要求达到了前所未有的…...

论文写作效率翻倍?okbiye 毕业论文 AI 功能全解析:从需求到终稿的规范路径
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 一、从界面看本质:okbiye 毕业论文 AI 写作的设计逻辑 打开 okbiye 的毕业论文 AI 写作页面,首先能感受到的是清晰的…...