基于飞桨框架的稀疏计算使用指南
本文作者-是 Yu 欸,华科在读博士生,定期记录并分享所学知识,博客关注者5w+。本文将详细介绍如何在 PaddlePaddle 中利用稀疏计算应用稀疏 ResNet,涵盖稀疏数据格式的础知识、如何创建和操作稀疏张量,以及如何开发和训练稀疏神经网络模型。
项目完整代码已上传至飞桨星河社区:https://aistudio.baidu.com/projectdetail/8055035
在现代计算框架中,为了高效地处理和存储大规模的数据集,尤其是在这些数据集中存在大量零值的情况下,采用稀疏数据结构变得尤为重要。飞桨是一个领先的深度学习平台,提供了强大的稀疏计算能力,支持从基本的稀疏张量操作到构建复杂的稀疏神经网络。这些工具主要通过 paddle.sparse 命名空间来实现,使得开发者能够高效处理大量包含零值的数据集,从而优化内存使用和计算速度
本文将详细介绍如何基于飞桨框架进行稀疏计算,包括稀疏数据格式的基础知识、如何创建和操作稀疏张量,以及如何开发和训练稀疏神经网络模型,特别是如何实现和应用稀疏 ResNet。通过这些知识,我们可以更有效地利用计算资源,加速模型训练过程,同时提高模型处理大规模稀疏数据的能力。
01 稀疏格式简介
稀疏格式是一种特殊的数据存储方式,旨在有效存储和处理其中大部分元素为零的矩阵或张量。这种方法可以显著减少存储空间的需求,并提高数据处理的效率。常见的稀疏格式包括 COO(坐标列表格式)、CSR(压缩稀疏行格式)等。
▎COO(Coordinate Format)
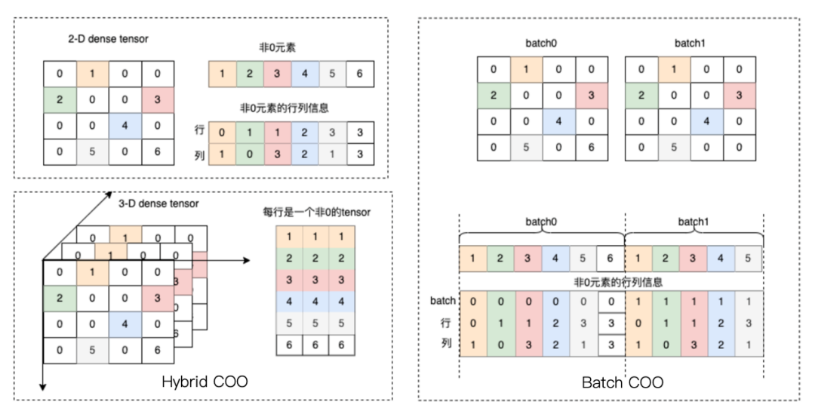
在 COO 格式中,只记录非零元素的位置和值。这种格式由三个主要组件组成:indices、values 和 shape。indices 是一个二维数组,其中的每一列代表一个非零元素的坐标;values 存储对应的非零元素值;shape 则描述了张量的维度。如下图所示。
▎CSR(Compressed Sparse Row Format)
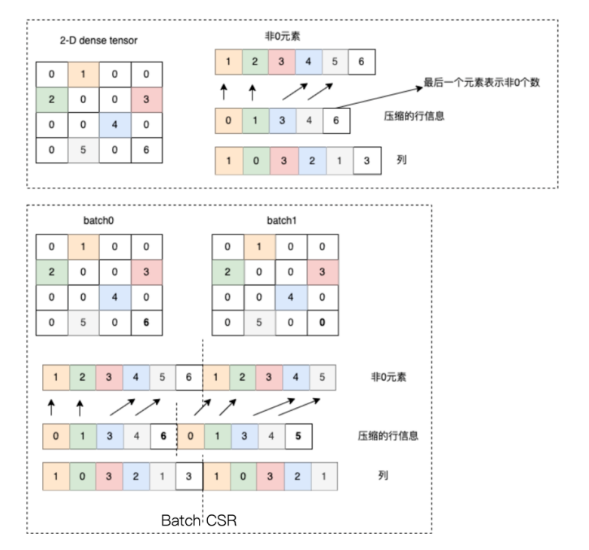
CSR 格式是一种更为紧凑的稀疏表示,专为快速的行访问和矩阵乘法运算优化。在 CSR 中,通过三个数组 crows、cols 和 values 来表示稀疏矩阵。crows 存储每一行第一个非零元素的索引,cols 存储非零元素的列索引,而 values 则直接存储这些非零元素的值。如下图所示。
02 基于飞桨框架的稀疏张量支持
飞桨框架提供了完整的支持来创建和操作 COO 和 CSR 格式的稀疏张量。以下是基于飞桨框架创建和操作这些张量的具体方法。
▎创建 COO 格式的 SparseTensor
COO 格式(Coordinate List):
-
这是一种常用的稀疏表示格式,其中非零元素通过其坐标列表进行存储。
-
使用 paddle.sparse.sparse_coo_tensor(indices,values, shape) 可以创建 COO 格式的稀疏张量,其中 indices 是一个二维整数张量,表示非零元素的坐标;values 是一个张量,包含与 indices 对应的值;shape 是一个定义张量形状的整数列表或张量。
结构特点:
-
COO 格式通过一个坐标列表存储非零元素的位置和相应的值。
-
它使用三个数组:一个数组存储行索引,一个存储列索引,第三个存储元素值。
适用场景:
-
数据添加频繁:当稀疏矩阵需要频繁添加新的非零元素时,COO 格式是较好的选择,因为它允许直接添加数据而不需重新构造整个数据结构。
-
简单结构:适合于那些结构简单的矩阵,特别是在非零元素分布较为随机时。
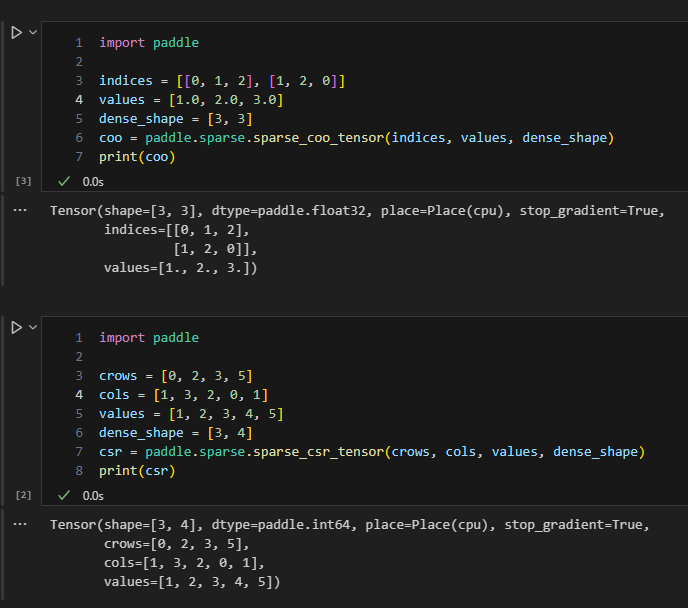
示例代码:飞桨框架中, sparse_coo_tensor 函数可用来创建 COO 格式的稀疏张量。
import paddleindices = [[0, 1, 2], [1, 2, 0]]
values = [1.0, 2.0, 3.0]
dense_shape = [3, 3]
coo = paddle.sparse.sparse_coo_tensor(indices, values, dense_shape)
print(coo)
输出:
Tensor(shape=[3, 3], dtype=paddle.float32, place=Place(cpu), stop_gradient=True,indices=[[0, 1, 2],[1, 2, 0]],values=[1., 2., 3.])
在这个例子中,indices 定义了非零元素的位置,其中每个子数组的两个数字分别代表行和列的坐标。
▎创建 CSR 格式的 SparseTenso
CSR 格式(Compressed Sparse Row)
-
这是另一种常用的稀疏表示格式,主要用于优化行访问的性能,其中非零元素通过行的压缩方式进行存储。
-
使用 paddle.sparse.sparse_csr_tensor(crows, cols, values, dense_shape) 可以创建 CSR 格式的稀疏张量,其中crows定义了每一行非零元素开始的位置在 values 数组中的索引,这有助于快速定位行的起始点和终点。cols 则指示了非零元素在各自行中的列位置,values 提供了相应的值。dense_shape 指定了张量的整体形状,即行数和列数。
结构特点:
-
CSR 格式通过行来压缩存储,使用三个数组:行指针数组、列索引数组、以及非零元素值数组。
-
行指针数组的大小比实际行数多一个,用于表示每行的起始位置和结束位置。
适用场景:
-
行操作优化:当需要高效地进行行相关的操作(如行切片、行求和)时,CSR 格式提供更优的性能。
-
矩阵乘法:对于稀疏矩阵与稀疏或密集矩阵的乘法运算,CSR 格式通常会提供更好的性能。
-
大规模数据处理:在处理大规模稀疏数据时,CSR 格式因其压缩特性而节省内存。
示例代码:为了创建 CSR 格式的稀疏张量,飞桨框架提供了 sparse_csr_tensor 函数。
import paddlecrows = [0, 2, 3, 5]
cols = [1, 3, 2, 0, 1]
values = [1, 2, 3, 4, 5]
dense_shape = [3, 4]
csr = paddle.sparse.sparse_csr_tensor(crows, cols, values, dense_shape)
print(csr)
输出:
Tensor(shape=[3, 4], dtype=paddle.int64, place=Place(cpu), stop_gradient=True, crows=[0, 2, 3, 5], cols=[1, 3, 2, 0, 1], values=[1, 2, 3, 4, 5])
在这个例子中,crows 定义了每一行非零元素开始的位置在 values 数组中的索引,这有助于快速定位行的起始点和终点。
这种 CSR 格式的表示方式适用于数据稀疏且行访问频繁的场景。它通过压缩行索引来减少内存使用,优化了对稀疏矩阵行的操作,使得行级操作更加高效。在处理行密集型操作(如行切片或行求和)时特别高效,也适合于稀疏矩阵的乘法等计算密集任务。
▎创建稀疏张量的相关参数详解
在基于飞桨框架创建稀疏张量 API 中,参数的设计允许用户灵活定义和操作稀疏数据结构。对于两种类型的稀疏张量创建函数,参数主要涉及初始化数据的类型和结构,其中:
■ 共通参数
对于 sparse_coo_tensor 和 sparse_csr_tensor 函数,存在一些共通的参数,这些参数允许用户指定如何构建和处理稀疏张量:
- values (list|tuple|ndarray|Tensor):
-
表示非零元素的实际数值。
-
类似于索引参数,可以是 list、tuple、NumPy ndarray 或 Paddle Tensor。
- shape (list|tuple, 可选):
-
定义稀疏张量的形状,如果未提供,则会根据 indices 或 crows 和 cols 的最大值自动推断。
-
必须是一个整数列表或元组,指定张量在每个维度的大小。
- dtype (str|np.dtype, 可选):
-
指定张量元素的数据类型,如 ‘float32’, ‘int64’ 等。
-
如果未指定,则从 values 的数据类型自动推断。
- place (CPUPlace|CUDAPinnedPlace|CUDAPlace|str, 可选):
-
决定张量的存储设备,例如 CPU 或 GPU。
-
如果未指定,则使用当前环境的默认设备。
- stop_gradient (bool, 可选):
-
指示是否对该张量进行梯度计算。
-
在大多数深度学习应用中,非模型权重的张量通常设置为 True 以提高计算效率。
■ 特定格式的参数细节
除了上述共通参数外,COO 和 CSR 格式因其数据结构的不同而在参数应用上有所区别。
indices, crows, cols (list|tuple|ndarray|Tensor):
-
对于 COO 格式,indices 参数是一个二维数组,用于直接指定每个非零元素的多维坐标。主要用于数据的随机访问和转换操作,适用于那些非零元素分布相对均匀的场景。
-
对于 CSR 格式,crows 表示每一行的起始非零元素索引,而 cols 存储这些非零元素的列索引。CSR 格式优化了行的连续访问,非常适合矩阵乘法和其他行优先操作。
-
这些参数可以是 Python 的 list 或 tuple,也可以是 NumPy ndarray 或 Paddle Tensor。
通过这些参数的灵活使用,飞桨框架允许开发者以高效且灵活的方式处理大规模稀疏数据集,从而在保持性能的同时减少内存消耗。
▎COO 格式和 CSR 格式的选择建议
-
如果应用主要涉及构建稀疏矩阵和逐项添加数据,COO 格式会更简单且直接。
-
如果应用需要高效的行操作或频繁进行矩阵乘法,特别是在稀疏矩阵较大的情况下,CSR 格式是更好的选择。
选择哪种格式应基于具体应用需求,如操作类型、数据规模和性能要求。在飞桨框架中,你可以根据需要轻松地在两种格式之间转换,以适应不同的计算需求。
▎稀疏与稠密 Tensor 互转
飞桨框架提供了一套简单易用的接口,使得稀疏张量的使用与传统的稠密张量操作体验高度一致,从而降低了学习成本并便于开发者快速上手。这种设计允许在同一个模型中灵活地使用稠密和稀疏数据结构,而且方便转换,这对于处理大规模数据集尤其重要,在深度学习、图像处理和自然语言处理等领域有着广泛的应用。
飞桨框架支持通过几个简单的 API,实现稀疏与稠密之间的转换,这些操作保证了数据处理的灵活性和效率。如 Tensor.to_dense()可以将稀疏张量转换为标准的密集张量, Tensor.to_sparse_coo(), 和 Tensor.to_sparse_csr() 可以将密集张量转换为 COO 格式、CSR 格式的稀疏张量。
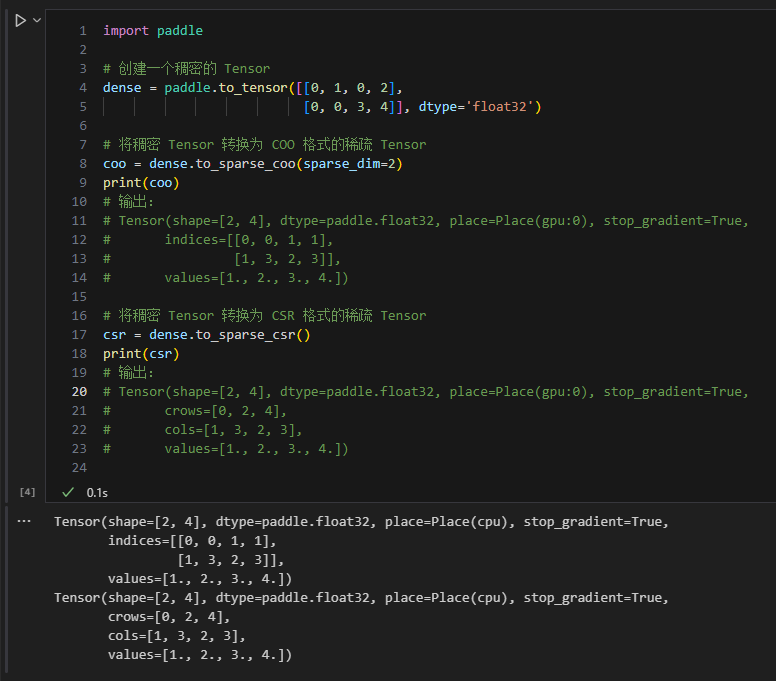
以下为稠密到稀疏的转换代码示例:
import paddle# 创建一个稠密的 Tensor
dense = paddle.to_tensor([[0, 1, 0, 2], [0, 0, 3, 4]], dtype='float32')# 将稠密 Tensor 转换为 COO 格式的稀疏 Tensor
coo = dense.to_sparse_coo(sparse_dim=2)
print(coo)
# 输出:
# Tensor(shape=[2, 4], dtype=paddle.float32, place=Place(gpu:0), stop_gradient=True,
# indices=[[0, 0, 1, 1],
# [1, 3, 2, 3]],
# values=[1., 2., 3., 4.])# 将稠密 Tensor 转换为 CSR 格式的稀疏 Tensor
csr = dense.to_sparse_csr()
print(csr)
# 输出:
# Tensor(shape=[2, 4], dtype=paddle.float32, place=Place(gpu:0), stop_gradient=True,
# crows=[0, 2, 4],
# cols=[1, 3, 2, 3],
# values=[1., 2., 3., 4.])
这些转换非常直观,仅需要简单的一步操作就可以完成,使得稀疏和稠密格式之间的交互变得简洁高效。
03 基于飞桨框架进行稀疏计算的设计优势
飞桨框架的设计目标之一是提供一致的用户体验,无论是处理稀疏数据还是稠密数据。这意味着即便是在处理包含大量零值的数据集时,开发者也可以利用熟悉的接口和模式来构建和训练模型。
▎API 设计的一致性
飞桨框架的稀疏模块提供了与常规稠密操作相似的 API 接口,开发者无需学习新的 API 就能处理稀疏数据。例如:
-
稀疏卷积层:稀疏模块中的 SubmConv3D 直接对应常规卷积操作中的 Conv3D。二者参数非常相似,如 in_channels, out_channels, stride, padding 等。
-
批归一化和激活函数:稀疏模块同样提供了批归一化和激活函数,如 BatchNorm3D 和 ReLU,其用法与常规模块中的相同。
▎集成度:训练和推理的处理流程
无论是稀疏还是稠密模型,飞桨框架中的训练和推理流程保持一致。稀疏操作可以与飞桨框架的其他特性(如自动微分和优化器)无缝集成,使得构建和训练稀疏模型与常规模型几乎无异。
-
定义模型:无论选择稀疏还是稠密模型,模型定义的方式都是相似的,使用 paddle.nn.Layer 类来构建网络层。
-
编译模型:使用 paddle.Model 对象来包装定义好的网络,然后编译,包括设置优化器、损失函数和评估指标。
-
训练和评估:通过调用 .fit 和 .evaluate 方法来进行训练和评估,这与处理稠密数据的流程完全一致。
04 基于飞桨框架的稀疏神经网络层支持
▎稀疏 ResNet 的应用场景
在处理点云数据、图像识别或自然语言处理任务时,输入数据通常具有很高的维度和稀疏性。例如,3D 点云数据往往是非结构化的,大部分体积内没有有效信息(即大部分体积是空的)。使用传统的密集(dense)卷积网络处理这类数据会带来两个主要问题:效率低下:对于大量的空白区域依然进行计算,消耗计算资源;存储浪费:需要为大量的零值分配存储资源。
稀疏 ResNet 解决了这些问题,通过仅在非零数据点上进行操作,从而大幅提高了计算和存储效率。
▎构建稀疏 ResNet 模型
在飞桨框架中,稀疏 ResNet 可以通过 paddle.sparse 模块中的稀疏卷积层(如 SubmConv3D)来实现。这些层专门用来处理稀疏数据。稀疏卷积层接受包含非零元素坐标和值的稀疏张量,并只在这些非零元素上执行卷积运算。通过构建包含这些稀疏卷积层的网络(如 ResNet 结构中的基础块),可以高效处理稀疏数据。
创建稀疏 ResNet 主要涉及以下几个步骤:
-
创建稀疏张量:首先需要从稀疏数据(即大部分值为零的数据)中创建稀疏张量。这通常涉及指定非零数据点的坐标和相应的值。
-
定义稀疏网络结构:设计一个网络结构,它包含适用于处理稀疏数据的特殊卷积层(如 Paddle 的 SubmConv3D)。这些层特别优化了内存和计算资源,只在数据非零的地方进行计算。
-
前向传播:将稀疏张量输入到网络中,执行前向传播,网络会在内部处理稀疏数据,并输出结果。
-
训练和评估:就像使用常规神经网络一样,定义损失函数和优化器,然后在训练数据上训练网络,最后在验证数据上评估网络的性能。
▎稀疏 ResNet 的关键组件
飞桨框架的 paddle.sparse 模块提供了对稀疏数据操作的支持,包括稀疏张量的创建、转换和计算功能。这些神经网络层针对稀疏数据的特点进行了优化,以减少对零值的计算和存储需求,提高处理效率。
- 稀疏张量(Sparse Tensor):
-
稀疏张量是一种特殊的数据结构,主要用于有效存储和处理大部分元素为零的数据。
-
在飞桨框架中,可以使用 paddle.sparse.sparse_coo_tensor 来创建稀疏张量,需要提供非零元素的坐标和值。
- 稀疏卷积层(Sparse Convolution):
-
paddle.sparse.nn.Conv3D:标准的三维卷积层,支持在稀疏数据上的操作,适用于处理体积大的三维数据。
-
paddle.sparse.nn.SubmConv3D:子流形三维卷积层,用于处理3D 数据的稀疏子矩阵卷积层。该层允许在3D 体积数据中有效地进行卷积操作,无需将整个数据转换为密集格式,特别适用于医学影像和三维扫描等领域。
- 批归一化层(Batch Normalization)
- paddle.sparse.nn.BatchNorm3D:批归一化层,专为三维数据设计,可以与稀疏卷积层结合使用,以优化稀疏数据的特征归一化过程。
- 池化层(Pooling Layers)
- paddle.sparse.nn.MaxPool3D:三维最大池化层,用于在稀疏三维数据上执行池化操作,有助于降低数据的维度和提高模型的抽象能力。
- 激活层(Activation Layers)
-
paddle.sparse.nn.ReLU、paddle.sparse.nn.ReLU6:标准 ReLU 和 ReLU6激活函数,支持在稀疏数据路径中使用,与常规的激活函数使用方法相同,但针对稀疏数据进行了优化。
-
paddle.sparse.nn.LeakyReLU:LeakyReLU 激活层,包含小负斜率的 ReLU 变体,适用于在稀疏数据中增强模型的非线性处理能力。
-
paddle.sparse.nn.Softmax:Softmax 激活层,适用于稀疏数据路径,使用方法与常规密集数据的 Softmax 相同,但特别针对稀疏数据进行了优化,常用于处理多分类问题。
▎构建稀疏 ResNet 模型的示例代码
在飞桨框架中,稀疏 ResNet 的实现和使用与传统的稠密网络相似,这得益于飞桨框架稀疏模块的设计,使得调用体验与稠密高度一致,非常容易上手。通过利用稀疏技术,可以有效处理大规模稀疏数据集,提高计算效率,降低存储需求,这在处理现代大数据应用时显得尤为重要。
下面以稀疏 ResNet 为例,说明飞桨框架对稀疏神经网络层的支持:
import paddle
from paddle import sparse
from paddle.sparse import nn as sparse_nn# 定义3D稀疏卷积块
def sparse_conv_block(in_channels, out_channels, stride=1, padding=1, key=None):block = paddle.nn.Sequential(sparse_nn.SubmConv3D(in_channels, out_channels, kernel_size=3, stride=stride, padding=padding, bias_attr=False, key=key),sparse_nn.ReLU())return block# 定义一个简单的稀疏3D ResNet模型
class SparseResNet(paddle.nn.Layer):def __init__(self, in_channels):super(SparseResNet, self).__init__()self.layer1 = sparse_conv_block(in_channels, 16, key='layer1')self.layer2 = sparse_conv_block(16, 32, stride=2, key='layer2')self.layer3 = sparse_conv_block(32, 64, stride=2, key='layer3')def forward(self, x):x = self.layer1(x)x = self.layer2(x)x = self.layer3(x)return x# 假设输入数据
batch_size = 1
channels = 1
depth = 100
height = 100
width = 100# 创建稀疏张量的坐标和值
coords = paddle.to_tensor([[0, 0, 0, 0, 0], [0, 0, 0, 0, 0], [0, 1, 2, 1, 1], [0, 2, 2, 1, 2], [0, 1, 2, 2, 0]], dtype='int64') # 5D坐标 (batch, channel, depth, height, width)
values = paddle.to_tensor([1.0, 1.5, 2.0, 3.0, 3.5], dtype='float32') # 每个值对应一个坐标
shape = paddle.to_tensor([batch_size, channels, depth, height, width], dtype='int64') # 5D形状# 创建稀疏张量
x = sparse.sparse_coo_tensor(coords, values, shape)# 实例化模型
model = SparseResNet(channels)# 使用模型进行预测
output = model(x)
print(output)
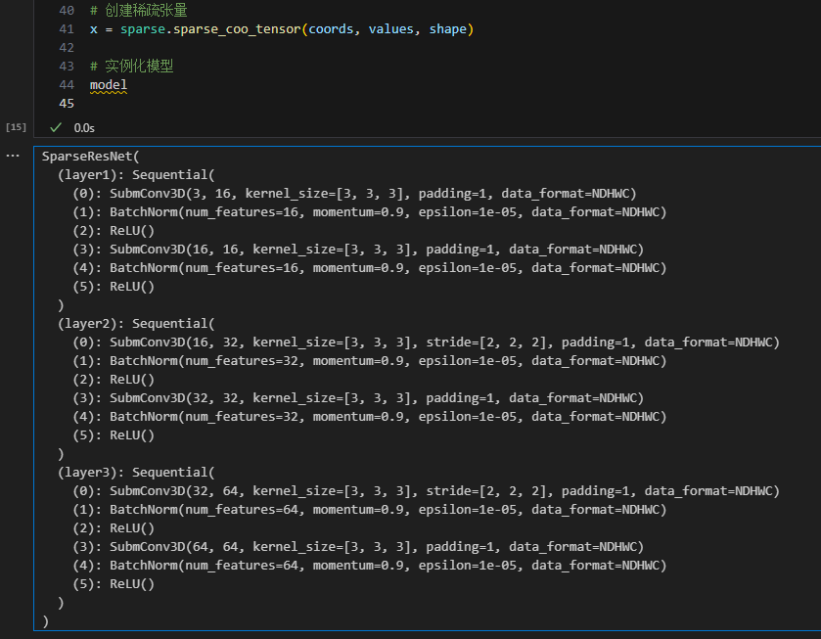
模型打印结果:
SparseResNet((layer1): Sequential((0): SubmConv3D(3, 16, kernel_size=[3, 3, 3], padding=1, data_format=NDHWC)(1): BatchNorm(num_features=16, momentum=0.9, epsilon=1e-05, data_format=NDHWC)(2): ReLU()(3): SubmConv3D(16, 16, kernel_size=[3, 3, 3], padding=1, data_format=NDHWC)(4): BatchNorm(num_features=16, momentum=0.9, epsilon=1e-05, data_format=NDHWC)(5): ReLU())(layer2): Sequential((0): SubmConv3D(16, 32, kernel_size=[3, 3, 3], stride=[2, 2, 2], padding=1, data_format=NDHWC)(1): BatchNorm(num_features=32, momentum=0.9, epsilon=1e-05, data_format=NDHWC)(2): ReLU()(3): SubmConv3D(32, 32, kernel_size=[3, 3, 3], padding=1, data_format=NDHWC)(4): BatchNorm(num_features=32, momentum=0.9, epsilon=1e-05, data_format=NDHWC)(5): ReLU())(layer3): Sequential((0): SubmConv3D(32, 64, kernel_size=[3, 3, 3], stride=[2, 2, 2], padding=1, data_format=NDHWC)(1): BatchNorm(num_features=64, momentum=0.9, epsilon=1e-05, data_format=NDHWC)(2): ReLU()(3): SubmConv3D(64, 64, kernel_size=[3, 3, 3], padding=1, data_format=NDHWC)(4): BatchNorm(num_features=64, momentum=0.9, epsilon=1e-05, data_format=NDHWC)(5): ReLU())
)
输出:
Tensor(shape=[1, 1, 100, 100, 64], dtype=paddle.float32, place=Place(cpu), stop_gradient=False, indices=[[0, 0, 0, 0],[0, 0, 0, 0],[0, 1, 1, 2],[0, 1, 2, 2]], values=[[0. , 0. , 0.08977110, 0. , 0. ,0. , 0. , 0.16325581, 0. , 0. ,0.08592274, 0. , 0. , 0. , 0.07656589,……0.12824626, 0.38880903, 0. , 0. , 0.23209766,0. , 0. , 0. , 0.24539268, 0.17324814,0. , 0. , 0. , 0. ]])
飞桨框架的稀疏模块可以创建类似于常规 ResNet 的模型架构,但使用的是稀疏卷积层替换传统的密集卷积层。每个稀疏卷积层后通常跟随一个批归一化层和 ReLU 激活函数,形成一个基础的稀疏残差块。
05 Paddle3D 应用实例解读:稀疏 ResNet
代码来源:Paddle3D 的 sparse_resnet.py
▎代码注释
这段代码定义了一个基于飞桨框架的稀疏3D 残差网络(SparseResNet3D),主要用于处理3D 点云数据,如自动驾驶系统中的激光雷达扫描数据。它通过稀疏卷积层对体素化(voxelized)的点云数据进行特征提取和处理。
“”“该符号内代码注释为新增”“”
导入所需库和模块:
import numpy as np
import paddle
from paddle import sparse
from paddle.sparse import nn
from paddle3d.apis import manager
from paddle3d.models.layers import param_init
这些库包括 numpy 用于数学运算,飞桨框架及其稀疏模块用于深度学习操作,以及 paddle3d 的 API 和模型层初始化。
定义卷积函数:
def conv3x3(in_out_channels, out_out_channels, stride=1, indice_key=None, bias_attr=True):"""3x3 convolution with padding, specifically for SubM sparse 3D convolution."""return nn.SubmConv3D(in_out_channels, out_out_channels, kernel_size=3, stride=stride, padding=1, bias_attr=bias_attr, key=indice_key)def conv1x1(in_out_channels, out_out_channels, stride=1, indice_key=None, bias_attr=True):"""1x1 convolution, also for SubM sparse 3D convolution."""return nn.SubmConv3D(in_out_channels, out_out_channels, kernel_size=1, stride=stride, padding=1, bias_attr=bias_attr, key=indice_key)
conv3x3和conv1x1是用于创建3D 稀疏卷积层的帮助函数,它们使用了飞桨框架的 SubmConv3D,这是一种专门处理稀疏数据的3D 卷积。
定义稀疏基础块类:
class SparseBasicBlock(paddle.nn.Layer):
""" A basic building block for constructing sparse 3D ResNet with two convolutional layers."""expansion =1def__init__(self, in_channels, out_channels, stride=1, downsample=None, indice_key=None):
super(SparseBasicBlock, self).__init__()self.conv1 = conv3x3(in_channels, out_channels, stride, indice_key, True)
self.bn1 = nn.BatchNorm(out_channels, epsilon=1e-3, momentum=0.01)
self.relu = nn.ReLU()
self.conv2 = conv3x3(out_channels, out_channels, indice_key=indice_key, bias_attr=True)
self.bn2 = nn.BatchNorm(out_channels, epsilon=1e-3, momentum=0.01)
self.downsample = downsample
self.stride = stridedef forward(self, x):identity = xout =self.conv1(x)out =self.bn1(out)out =self.relu(out)out =self.conv2(out)out =self.bn2(out)ifself.downsample isnotNone:identity =self.downsample(x)out = sparse.add(out, identity)out =self.relu(out)
return out
SparseBasicBlock 是 SparseResNet3D 的核心模块,包括两个稀疏卷积层、批归一化和 ReLU 激活函数,以及可选的下采样,用于残差连接。
定义 SparseResNet3D 网络:
@manager.MIDDLE_ENCODERS.add_component
class SparseResNet3D(paddle.nn.Layer):""" The main Sparse 3D ResNet class, designed for processing voxelized point cloud data."""def __init__(self, in_channels, voxel_size, point_cloud_range):super(SparseResNet3D, self).__init__()# Initial conv layerself.conv_input = paddle.nn.Sequential(nn.SubmConv3D(in_channels, 16, 3, bias_attr=False, key='res0'),nn.BatchNorm(16), nn.ReLU())# Subsequent layers with increasing channel depth and decreasing spatial dimensionsself.conv1 = paddle.nn.Sequential(SparseBasicBlock(16, 16, indice_key='res0'),SparseBasicBlock(16, 16, indice_key='res0'),)self.conv2 = paddle.nn.Sequential(nn.Conv3D(16, 32, 3, 2, padding=1, bias_attr=False), # downsamplenn.BatchNorm(32), nn.ReLU(),SparseBasicBlock(32, 32, indice_key='res1'),SparseBasicBlock(32, 32, indice_key='res1'),)self.conv3 = paddle.nn.Sequential(nn.Conv3D(32, 64, 3, 2, padding=1, bias_attr=False), # downsamplenn.BatchNorm(64), nn.ReLU(),SparseBasicBlock(64, 64, indice_key='res2'),SparseBasicBlock(64, 64, indice_key='res2'),)self.conv4 = paddle.nn.Sequential(nn.Conv3D(64, 128, 3, 2, padding=[0, 1, 1], bias_attr=False), # downsamplenn.BatchNorm(128), nn.ReLU(),SparseBasicBlock(128, 128, indice_key='res3'),SparseBasicBlock(128, 128, indice_key='res3'),)# Extra conv layer to further process featuresself.extra_conv = paddle.nn.Sequential(nn.Conv3D(128, 128, (3, 1, 1), (2, 1, 1), bias_attr=False), # Adjust the spatial dimensionsnn.BatchNorm(128), nn.ReLU(),)# Calculate the grid size for the 3D data based on the provided voxel size and point cloud rangepoint_cloud_range = np.array(point_cloud_range, dtype=np.float32)voxel_size = np.array(voxel_size, dtype=np.float32)grid_size = (point_cloud_range[3:] - point_cloud_range[:3]) / voxel_sizegrid_size = np.round(grid_size).astype(np.int64)self.sparse_shape = np.array(grid_size[::-1]) + [1, 0, 0]self.in_channels = in_channelsself.init_weight()def init_weight(self):""" Initialize weights for convolutional layers and batch normalization layers."""for layer in self.sublayers():if isinstance(layer, (nn.Conv3D, nn.SubmConv3D)):param_init.reset_parameters(layer)if isinstance(layer, nn.BatchNorm):param_init.constant_init(layer.weight, value=1)param_init.constant_init(layer.bias, value=0)def forward(self, voxel_features, coors, batch_size):""" The forward pass for processing input voxel features and coordinates."""# Setup the sparse tensor with the specified shape and input featuresshape = [batch_size] + list(self.sparse_shape) + [self.in_channels]sp_x = sparse.sparse_coo_tensor(coors.transpose((1, 0)),voxel_features,shape=shape,stop_gradient=False)# Pass the sparse tensor through the sequential layersx = self.conv_input(sp_x)x_conv1 = self.conv1(x)x_conv2 = self.conv2(x_conv1)x_conv3 = self.conv3(x_conv2)x_conv4 = self.conv4(x_conv3)# Final extra convolutional processingout = self.extra_conv(x_conv4)# Convert the output back to a dense tensor and adjust dimensions for further processingout = out.to_dense()out = paddle.transpose(out, perm=[0, 4, 1, 2, 3])N, C, D, H, W = out.shapeout = paddle.reshape(out, shape=[N, C * D, H, W])return out
此类中定义了一系列卷积层和残差块,用于逐步处理和提取输入点云数据的特征。网络通过逐层降采样来增加特征深度并减小空间维度,最终输出密集的特征张量,适合后续的处理或学习任务。
06 小结
飞桨框架不仅支持自定义稀疏神经网络结构,也可以通过提供的 API 轻松地实现已有的经典结构,如 ResNet、VGG 等。对于这些经典网络,通过替换标准的卷积层为相应的稀疏卷积层,可以使其适应稀疏数据的处理,从而拓展其应用到新的领域,如3D 点云处理。
总的来说,飞桨框架在提供稀疏计算支持的同时,确保了开发体验的一致性和直观性,方便开发者在稀疏和稠密数据操作之间切换,同时保证数据处理高效。
——————END——————
参考资料:
[1]官网 paddle.sparse 目录
https://www.paddlepaddle.org.cn/documentation/docs/zh/api/paddle/sparse/Overview_cn.html
[2]https://mp.weixin.qq.com/s/SD_P2K1HP3FVM5ADqbpmVQ
推荐阅读:
云高性能计算平台 CHPC 让企业的传统 HPC 玩出新花样
Embedding空间中的时序异常检测
读友好的缓存淘汰算法
如何定量分析 Llama 3,大模型系统工程师视角的 Transformer 架构
微服务架构革新:百度Jarvis2.0与云原生技术的力量
相关文章:
基于飞桨框架的稀疏计算使用指南
本文作者-是 Yu 欸,华科在读博士生,定期记录并分享所学知识,博客关注者5w。本文将详细介绍如何在 PaddlePaddle 中利用稀疏计算应用稀疏 ResNet,涵盖稀疏数据格式的础知识、如何创建和操作稀疏张量,以及如何开发和训练…...

启明云端WT32C3-S6物联网模块,乐鑫ESP32-C3芯片技术应用
随着物联网技术的飞速发展,智能设备在我们生活中的应用越来越广泛。从智能电网到远程医疗,从楼宇自动化到智能家居,这些技术正在改变我们的生活方式。 在这样的背景下,启明云端推出的WT32C3-S6 WiFi模块以其低功耗、高性价比的特…...

超越流水线,企业研发规范落地新思路
作者:子丑 内容大纲: 1、研发规范≠流程约束 2、自动化工具→研发规范载体 3、研发规范在工具上的落地示例 4、研发规范的选型方法与常见实践 研发规范≠流程约束 这个故事特别适合研发规范的场景,我们要避免成为把猫绑在柱子上的信众…...

财务会计与管理会计(四)
文章目录 月度数据统计分析OFFSET函数在图表分析中的应用 多种费用组合分析图SUMPRODUCT函数 省公司全年数据分析模板INDIRECT、OFFSET函数 多公司分季度数据筛选VLOOKUP、IFERROR函数的应用 淘宝后台数据分析OFFSET函数在跨表取数中的应用 燃气消耗台账数据统计分析图SUMPRODU…...
回归分析系列1-多元线性回归
03 多元线性回归 3.1 简介 多元线性回归是简单线性回归的扩展,允许我们同时研究多个自变量对因变量的影响。多元回归模型可以表示为: 其中,x1,x2,…,xp是 p 个自变量,β0 是截距,β1,β2,…,βp是对应的回归系数&…...

web小游戏开发:拼图——蜂巢拼图
web小游戏开发:拼图——蜂巢拼图 蜂巢拼图游戏规则调整选项切图计算六边形的宽和高铺上背景画出蜂巢制作图块游戏方法打乱排列拖拽图块开始拖拽拖拽移动放置图块小结蜂巢拼图 之前我们已经完成了长方形的拼图代码,包括了三个游戏方式,并讨论了带咬合齿的游戏代码该如何制作…...

springCloud集成activiti5.22.0流程引擎(分支)
springCloud集成activiti5.22.0流程引擎 点关注不迷路,欢迎再访! 精简博客内容,尽量已行业术语来分享。 努力做到对每一位认可自己的读者负责。 帮助别人的同时更是丰富自己的良机。 文章目录 springCloud集成activiti5.22.0流程引擎一.Sprin…...
ppt模板免费网站有哪些?自动美化工具推荐
新的8月,是时候以全新面貌迎接高效办公挑战了! 想要你的PPT演示脱颖而出,却苦于找不到精美又免费的模板? 别担心,今天我来告诉你们:哪个软件有精美免费ppt模板? 今天我为你们精心汇总了6款PPT…...

java实现解析pdf格式发票
为了减少用户工作量及误操作的可能性,需要实现用户上传PDF格式的发票,系统通过解析PDF文件获取发票内容,并直接将其写入表单。以下文章记录了功能实现的代码。 发票样式 发票内容解析 引用Maven 使用pdfbox <dependency><groupI…...

数据结构初阶——算法复杂度超详解
文章目录 1. 数据结构前言1. 1 数据结构1. 2 算法 2. 算法效率2. 1 复杂度的概念 3. 时间复杂度3. 1 大O的渐进表示法3. 2 时间复杂度计算示例3. 2. 1 示例13. 2. 2 示例23. 2. 3 示例33. 2. 4 示例43. 2. 5 示例53. 2. 6 示例63. 2. 7 示例7 4. 空间复杂度4. 1 空间复杂度计算…...
布局 4 预定义的形状和箭头)
ArcGIS Pro SDK (十二)布局 4 预定义的形状和箭头
ArcGIS Pro SDK (十二)布局 4 预定义的形状和箭头 文章目录 ArcGIS Pro SDK (十二)布局 4 预定义的形状和箭头1 创建预定义的形状图形元素2 创建预定义的形状图形元素3 创建预定义的形状图形元素4 创建线箭头元素环境:Visual Studio 2022 + .NET6 + ArcGIS Pro SDK 3.0 1 …...

在 Ubuntu 14.04 服务器上安装 ISPConfig3 的方法
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。 简介 虽然命令行是一个强大的工具,可以让您在许多情况下快速轻松地工作,但在某些情况下,可视化界面…...

ELK学习笔记
ElasticStack分布式日志系统概述 Elasticsearch: 一个分布式搜索引擎,能够快速存储、搜索和分析大量数据。核心概念包括索引(Index)、文档(Document)和分片(Shard)。使用 RESTful API 进行数据操…...

Python+Selenium+Pytest+POM自动化测试框架封装详解
1、测试框架简介 1)测试框架的优点 代码复用率高,如果不使用框架的话,代码会显得很冗余。可以组装日志、报告、邮件等一些高级功能。提高元素等数据的可维护性,元素发生变化时,只需要更新一下配置文件。使用更灵活的…...

Hidden Marlov Model(HMM)
一、Model 1、将声学特征设为X,经过语音识别得到的tokens设为Y,目标是找到通过X得到Y的最大概率,可以通过概率公式改变为 分为两个概率 2、将tokens序列Y转化为states序列S,声学特征分得更细 3、从states到声学特征的过程 二、HM…...

mamba的安装及下载速度慢问题解决
同事反馈mamba的安装时网络慢 mamba是conda的加速工具,相比于conda 对包和环境的管理,mamba可以实现并行运算。相比于 conda,mamba 是用C重写了 conda 的部分功能,运行效率显著提高,可以进行并行的下载,使…...
【Linux入门】Linux环境搭建
目录 前言 一、发行版本 二、搭建Linux环境 1.Linux环境搭建方式 2.虚拟机安装Ubuntu 22.02.4 1)安装VMWare 2)下载镜像源 3)添加虚拟机 4)换源 5)安装VM Tools 6)添加快照 总结 前言 Linux是一款自由和开放…...

CPU缓存一致性机制详解
CPU缓存一致性机制详解 在多核处理器中,缓存一致性是保证系统正常运行的重要环节。本文详细介绍了缓存一致性协议、写入策略、总线嗅探、目录协议等相关概念,并通过示例代码解释了这些机制是如何在实际应用中工作的。通过学习本文,读者可以深…...

Android 12系统源码_屏幕设备(一)DisplayManagerService的启动
前言 DisplayManagerService是Android Framework中管理显示屏幕相关的模块,各种Display的连接、配置等,都是通过DMS和来管理控制。 在DMS模块中,对显示屏幕的描述分为物理显示屏(physical display)和逻辑显示屏(logical display),…...

《AI视频类工具之十——D-ID》
一.简介 官网:D-ID | The #1 Choice for AI Generated Video Creation Platform D-ID是一个人工智能生成的视频创建平台,可以轻松快速地从文本输入中创建高质量、高性价比和引人入胜的视频,背后的Al技术是由Stable Difusion和GPT.3提供支持,可以在没有任何技术知识的情况…...

毫米波雷达3D重建技术:挑战与RFconstruct系统创新
1. 毫米波雷达3D重建技术概述在自动驾驶感知系统中,毫米波雷达因其独特的物理特性正扮演着越来越关键的角色。与激光雷达和摄像头相比,工作在76-81GHz频段的毫米波雷达具有穿透雾霾、雨雪的能力,且不受光照条件影响,这使其成为全天…...

IDE扩展管理套件:实现配置即代码与团队环境同步
1. 项目概述:一个为开发者定制的IDE扩展管理套件如果你和我一样,每天的工作都离不开各种集成开发环境(IDE),比如 Visual Studio Code、IntelliJ IDEA 或者 PyCharm,那你一定对“扩展”或“插件”又爱又恨。…...

对比直接使用官方 API 观察通过 Taotoken 聚合调用的成本差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用官方 API 与通过 Taotoken 聚合调用的成本差异 在集成大模型能力到实际项目时,除了关注模型效果和稳定性&…...
)
第53节:倾斜模型osgb转3dtiles(免费工具)
1、下载cesiumlab工具 下载地址 2、启动cesiumlab,进行登录访问(网页版) 没有账号的可以用手机号注册一个 3、 选择倾斜模型切片 4、选择倾斜模型数据路径 5、设置空间参考、零点坐标 如果选择完osgb数据后能自动带出来则不用设置&…...

基于SpringBoot的汽车美容养护管理系统的设计与开发
一、选题依据和意义 (一)选题依据 随着国内汽车保有量持续攀升,汽车后市场规模不断扩大,汽车美容养护行业迎来快速发展期,但行业整体仍存在管理效率低下、服务流程不规范等问题[1]。传统管理模式依赖人工记录客户信息…...

开源笔记Memos与AI助手Copaw集成:打造自动化知识管理工作流
1. 项目概述:当开源笔记遇上AI助手最近在折腾个人知识管理工具,发现一个挺有意思的组合:Hailpeng的copaw-memos-integration。简单来说,它把两个独立但都很棒的工具给“焊”在了一起。一边是Memos,一个极简、开源、自部…...

【CTF】【Misc 文件类型】工具与流程
工具准备 本人为方便 CTF 部分 Misc 类型的解题,制作如下集成软件。本软件集成常用功能,能一站式解决大多数 Misc 文件类问题,省去切换工具的繁琐流程,大大提高解题效率,且界面简洁易用。且预留了拓展接口,…...

实战指南:深度解析markmap思维导图转换架构与多格式输出优化
实战指南:深度解析markmap思维导图转换架构与多格式输出优化 【免费下载链接】markmap Build mindmaps with plain text 项目地址: https://gitcode.com/gh_mirrors/ma/markmap markmap是一个强大的开源工具,能够将结构化的Markdown文本转换为交互…...

告别‘数据孤岛’的幻想:深入拆解联邦学习Non-IID问题的根源与EMD度量
告别“数据孤岛”的幻想:联邦学习Non-IID问题的本质与实战应对 当企业兴奋地部署联邦学习系统时,常会遭遇这样的尴尬:模型在各方本地数据上表现优异,聚合后却性能骤降。这背后隐藏着一个被低估的真相——数据天然独立同分布&#…...
)
别再手动算矩阵了!CloudCompare 2025版点云变换保姆级教程(齐次/欧拉/轴角一键搞定)
别再手动算矩阵了!CloudCompare 2025版点云变换保姆级教程(齐次/欧拉/轴角一键搞定) 点云数据处理中,最让人头疼的莫过于各种空间变换操作。传统方法需要手动计算变换矩阵,不仅容易出错,还耗费大量时间。Cl…...