Linux驱动入门实验班——SR501红外模块驱动(附百问网视频链接)
目录
一、工作方式
二、接口图
三、编写思路
1.构造file_operations结构体
2.实现read函数
3.编写入口函数
4.编写中断处理函数
5.编写出口函数
6.声明出入口函数以及协议
四、源码
五、课程链接
一、工作方式
SR501人体红外感应模块有两种工作模式:
通过跳线来设置是否可以重复触发,默认为L。其中L表示不可重复,H表示可重复。含义如下:
①不可重复触发方式:
感应到人体并输出高电平后,延时时间一结束,输出将自动从高电平变为低电平。
②重复触发方式:
感应到人体后输出高电平后,在延时时间段内,如果有人体在其感应范围内活动,其输出将一直保持高电平,直到人离开后才延时将高电平变为低电平(感应模块检测到人体的每一次活动后会自动顺延一个延时时间段,并且以最后一次活动的时间为延时时间的起始点)。
在本次实验中,我们使用的是不可重复触发方式。
二、接口图
根据下面接口图,我们可以算出SR501模块所在的引脚编号为115。

三、编写思路
1.构造file_operations结构体
对于SR501模块我们只需要读取他即可。
static struct file_operations sr501_drv = {.owner = THIS_MODULE,.read = sr501_drv_read,
};2.实现read函数
先是构造了,一个环形buf用来存放数据,读取也是直接从这个环形buf中读取数据。此外,还引入了对应用层是使用阻塞还是非阻塞方式执行的判断。
使用到的函数:
- wait_event_interruptible()
- copy_to_user()
- DECLARE_WAIT_QUEUE_HEAD()
3.编写入口函数
先将gpio编号转换为中断号,然后再申请中断,然后就是注册file_operations结构体
使用到的函数:
- gpio_to_irq()
- request_irq()
- register_chrdev()
- class_create()
- device_create()
4.编写中断处理函数
每当产生上升沿或者下降沿时,就会触发中断,这时候就读取引脚电平,将数据放入环形buf。
使用到的函数:
- gpio_get_value()
5.编写出口函数
释放掉入口函数中注册的资源。
使用到的函数:
- device_destroy()
- class_destroy()
- unregister_chrdev()
- free_irq()
6.声明出入口函数以及协议
- module_init()
- module_exit()
- MODULE_LICENSE("GPL")
四、源码
驱动
#include "asm-generic/errno-base.h"
#include "asm-generic/gpio.h"
#include "asm/uaccess.h"
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>#define BUF_LEN 128struct gpio_desc{int gpio;int irq;char *name;int key;struct timer_list key_time;
};static struct gpio_desc gpios[2] = {{115, 0, "sr501"},
};static int major;
static struct class *sr501_class;
static struct fasync_struct *sr501_fasync;static int r, w;
static int g_buf[BUF_LEN];static int is_empty(void)
{return (r == w);
}static int is_full(void)
{return (r = ((w + 1) % BUF_LEN));
}static void put_val(int val)
{if (!is_full()){g_buf[w] = val;w = (w + 1) % BUF_LEN;}
}static int get_val(void)
{int val = 0;if (!is_empty()){val = g_buf[r];r = (r + 1) % BUF_LEN;}return val;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);static ssize_t sr501_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{int val;int ret;if (!is_empty() && (file->f_flags & O_NONBLOCK)){return -EINVAL;}wait_event_interruptible(gpio_wait, !is_empty());val = get_val();ret = copy_to_user(buf, &val, 4);return 4;
}static struct file_operations sr501_drv = {.owner = THIS_MODULE,.read = sr501_drv_read,
};static irqreturn_t sr501_isr(int irq, void *dev_id)
{int val;int key;struct gpio_desc *gpio_desc = dev_id;val = gpio_get_value(gpio_desc->gpio);key = (gpio_desc->key) | (val << 8);put_val(key);wake_up_interruptible(&gpio_wait);return IRQ_HANDLED;
}static int __init sr501_drv_init(void)
{int ret;int count = sizeof(gpios) / sizeof(gpios[0]);int i;for (i = 0; i < count; i++){gpios[i].irq = gpio_to_irq(gpios[i].gpio);ret = request_irq(gpios[i].irq, sr501_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, gpios[i].name, &gpios[i]);}major = register_chrdev(0, "sr501_drv",&sr501_drv);sr501_class = class_create(THIS_MODULE, "sr501_class");device_create(sr501_class, NULL, MKDEV(major, 0), NULL, "sr501_drv");return ret;
}static void __exit sr501_drv_exit(void)
{int i;int count = sizeof(gpios) / sizeof(gpios[0]);device_destroy(sr501_class, MKDEV(major, 0));class_destroy(sr501_class);unregister_chrdev(major, "sr501_drv");for (i = 0; i < count; i++){free_irq(gpios[i].irq, &gpios[i]);}
}module_init(sr501_drv_init);
module_exit(sr501_drv_exit);MODULE_LICENSE
("GPL");
应用
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>int main(int argc, char **argv)
{int fd;int val;if (argc != 2){printf("Usage : %s <dev>\n", argv[0]);return -1;}fd = open(argv[1], O_RDWR);if (fd == -1){printf("open %s error\n", argv[1]);return -1;}while (1){if (read(fd, &val, 4) == 4){printf("get sr501 : %d\n", val);}else{printf("get sr501 : error\n");}}close(fd);return 0;
}
五、课程链接
40_模板1实战_SR501红外模块驱动编程 (100ask.net)![]() https://video.100ask.net/p/t_pc/course_pc_detail/video/v_636c762ce4b0276efeaea816?product_id=p_634cbce4e4b00a4f37500252&content_app_id=&type=6
https://video.100ask.net/p/t_pc/course_pc_detail/video/v_636c762ce4b0276efeaea816?product_id=p_634cbce4e4b00a4f37500252&content_app_id=&type=6
相关文章:
Linux驱动入门实验班——SR501红外模块驱动(附百问网视频链接)
目录 一、工作方式 二、接口图 三、编写思路 1.构造file_operations结构体 2.实现read函数 3.编写入口函数 4.编写中断处理函数 5.编写出口函数 6.声明出入口函数以及协议 四、源码 五、课程链接 一、工作方式 SR501人体红外感应模块有两种工作模式: …...
)
windows C++- Com技术简介(上)
在介绍C和winrt与COM组件技术的关系之前,有必要介绍一下com组件技术,这项技术比较古老,但是它一直作为windows的基石存在。COM 是一类独立于平台且面向对象的分布式系统,用于创建可交互的二进制软件组件。 COM 技术是 Microsoft O…...

Jenkins持续集成工具学习
一、从装修厨房看项目开发效率优化 二、持续集成工具 三、JavaEE项目部署方式对比 四、JenkinsSVN持续集成环境搭建 五、JenkinsGitHub持续集成环境搭建...

Redis:查询是否包含某个字符/字符串之三
上一篇:Redis:查询是否包含某个字符/字符串之二-CSDN博客 摘要: 遍历key,在跟进value的类型遍历value是否包含指定字符串 search_strings ,这里使用redis-py库,默认只能处理utf-8编码,如果存在…...
【Redis】数据类型详解及其应用场景
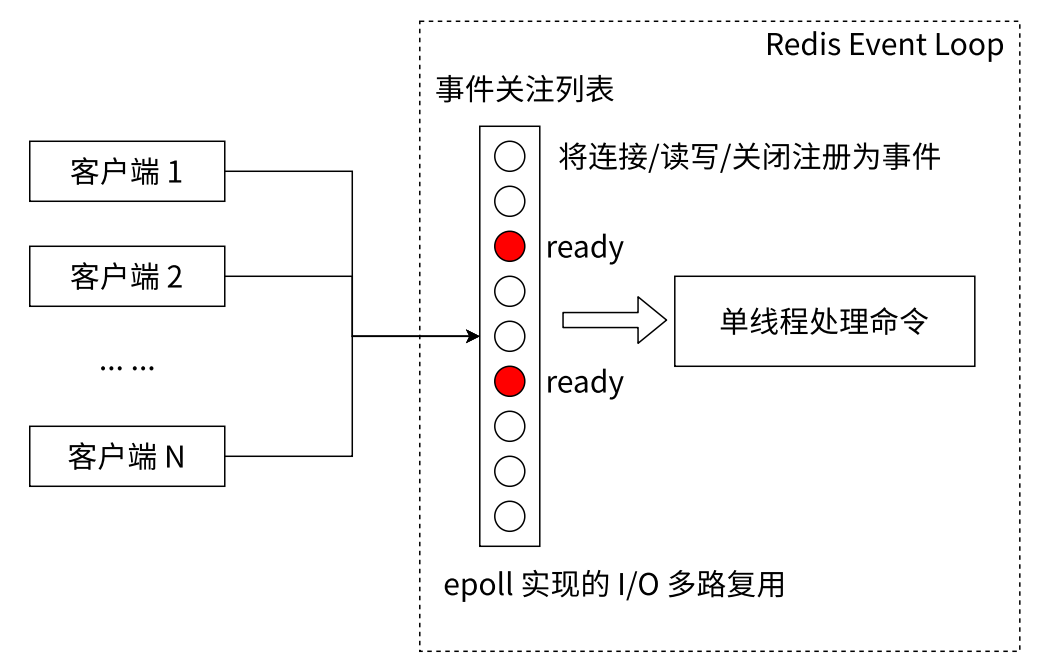
目录 Redis 常⻅数据类型预备知识基本全局命令小结 数据结构和内部编码单线程架构引出单线程模型为什么单线程还能这么快 Redis 常⻅数据类型 Redis 提供了 5 种数据结构,理解每种数据结构的特点对于 Redis 开发运维⾮常重要,同时掌握每种数据结构的常⻅…...

PARA-Drive:设计并行模型实现端到端自动驾驶
论文链接 https://openaccess.thecvf.com/content/CVPR2024/papers/Weng_PARA-Drive_Parallelized_Architecture_for_Real-time_Autonomous_Driving_CVPR_2024_paper.pdfhttps://openaccess.thecvf.com/content/CVPR2024/papers/Weng_PARA-Drive_Parallelized_Architecture_fo…...

vs2022 x64 C/C++和汇编混编 遇到的坑
vs2022 x64 C/C和汇编混编 遇到的坑 遇到的问题二、问题复现1.出错代码2.问题分析2.1 堆栈对齐问题 3.解决方案 总结奇数和偶数个寄存器的影响为什么 sub rsp, 8 对奇数个寄存器有用?结论 遇到的问题 0x00007FFFFAE24A29 (msvcp140.dll)处(位于 TestCompileConsole…...
PHP概述、环境搭建与基本语法讲解
目录 【学习目标、重难点知识】 什么是网站? 1. PHP 介绍 1.1. PHP 概述 1.1.1. PHP 是什么? 1.1.2. PHP 都能做什么? 1.2. PHP 环境搭建 1.2.1. PhpStudy 2. PHP 基本语法 2.1. PHP 语法入门 2.1.1. 第一个 PHP 程序 2.1.2. PHP …...
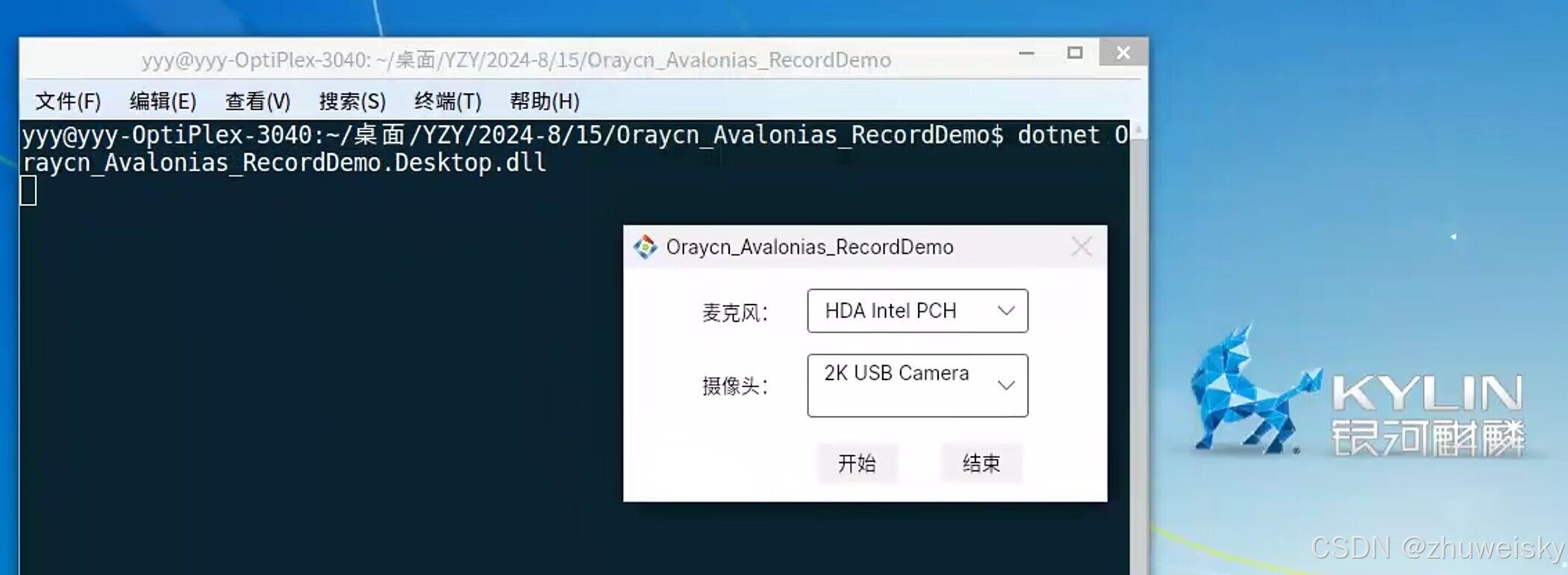
实现信创Linux麦克风摄像头录制(源码,银河麒麟、统信UOS)
随着信创国产化浪潮的来临,在国产操作系统上的应用开发的需求越来越多,其中一个就是需要在银河麒麟或统信UOS上实现录制摄像头视频和麦克风声音,将它们录制成一个mp4文件。那么这个要如何实现了? 一. 技术方案 要完成这些功能&a…...

深度学习9--目标检测
1.概念介绍 目标检测不仅可以检测数字,而且可以检测动物的种类、汽车的种类等。例如,自动驾驶车辆需要自动识别前方物体是车辆还是行人,需要自动识别道路两 旁的指示牌和前方的红绿灯颜色。对于自动检测的算法,有两个要求…...

第131天:内网安全-横向移动Kerberos 攻击SPN扫描WinRMWinRSRDP
案例一:域横向移动-RDP-明文&NTLM RDP利用的三种方式 1.直接在当前被控主机上进行远程连接 2.建立节点进行连接 3.端口转发,(访问当前主机的2222端口等于访问目标的3389) 第一种方式(动静太大) 直接利用被控主机进行远程连接…...

微信小程序的四种弹窗使用
在做小程序的过程中,弹窗也算是非常实用的功能了,这几天写的几个功能就用到了弹窗,也可能是初学者的问题,比较菜,想找一个可以带图片的自定义的弹窗,,这里简单介绍一下官方封装好的四个弹窗…...

我的第一个CUDA程序
MatAdd算法 实现两个矩阵对应元素相加 #include <stdio.h> #include <stdlib.h>// 矩阵加法函数 void MatAdd(int height, int width) {// 在主机内存中为 A、B 和 C 分配内存float* A (float*)malloc(height * width * sizeof(float));float* B (float*)malloc…...

workerman下的webman路由浏览器跨域的一种问题
软件版本 "php": ">7.2", "workerman/webman-framework": "^1.5.0",问题情景 使用“分组路由”做API接口前后端分离跨域,在接口测试工具调试是能正常获取数据的;但在网页浏览器上调试就遇到了CORS、404的错…...

Windows11 -MASKRCNN-部署测试
文章目录 Detectron2环境配置搭建python 环境安装Cuda \CUDNN 、PyTorch、 torchvision、cudatoolkit1、Cuda \CUDNN2、 PyTorch、 torchvision、cudatoolkit进入python测试:错误信息 3、detectron2环境在安装detecteron中,遇到报错:编译的时…...

函数(子程序)的常见、易混淆概念详解【对初学者有帮助】
C语⾔中的函数也被称做子程序,意思就是⼀个完成某项特定的任务的⼀小段代码。 C语⾔标准中提供了许多库函数,点击下面的链接可以查看c语言的库函数和头文件。 C/C官⽅的链接:https://zh.cppreference.com/w/c/header 目录 一、函数头与函…...

TiDB-从0到1-DM工具
TiDB从0到1系列 TiDB-从0到1-体系结构TiDB-从0到1-分布式存储TiDB-从0到1-分布式事务TiDB-从0到1-MVCCTiDB-从0到1-部署篇TiDB-从0到1-配置篇TiDB-从0到1-集群扩缩容TiDB-从0到1-数据导出导入TiDB-从0到1-BR工具 一、DM原理 支持全量抽取数据\检测新的数据变化同步到下游实例…...

AppScan——Web 应用安全扫描的得力工具
一、引言 在当今数字化时代,Web 应用成为企业业务的重要支撑,但同时也面临着各种安全威胁。AppScan 作为一款专业的 Web 应用安全扫描工具,为保障 Web 应用的安全性提供了有力的支持。本文将对 AppScan 进行详细介绍,包括其功能、…...

虚幻5|AI行为树,进阶篇
一,打开敌人的角色蓝图,编写以下蓝图,该蓝图只是创建一个敌人并非ai行为树 1.编写蓝图 2.打开主界面,创建一个导航网格体积,上一章都有讲,在添加体积这里面,找到导航网格体积,点击创…...

在 Spring Boot 中配置 Tomcat 监听多个端口
在现代微服务架构中,应用程序可能需要监听多个端口,以支持不同的服务或协议。Spring Boot 提供了灵活的配置选项,使得这一需求变得简单而高效。本文将介绍如何在 Spring Boot 中配置 Tomcat 以监听多个端口,并简要说明其中一些关键…...

03 - 变量与数据类型
03 - 变量与数据类型 变量是编程里最基础的概念,相当于你往电脑里存东西的"容器"。这章我们把变量的命名规则、Python 的几种基本数据类型都过一遍。 变量是什么 说白了,变量就是一个有名字的盒子。你往里面放个东西,以后想用这个…...

用图神经网络做缺陷定位,准确率比传统方法高出30%
在现代软件工程的复杂迷宫中,缺陷定位始终是测试团队面临的核心挑战。想象这样一个场景:一个电商系统在特定压力条件下偶发订单丢失,日志中只留下泛泛的超时错误,问题可能深藏在上百个微服务的调用链、分布式事务的竞态条件或某个…...

3分钟告别英文恐惧:Android Studio中文界面轻松切换指南
3分钟告别英文恐惧:Android Studio中文界面轻松切换指南 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 你是否曾经因…...

集成Taotoken为OpenClaw工作流提供持久化模型支持
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 集成Taotoken为OpenClaw工作流提供持久化模型支持 在构建基于OpenClaw的自动化Agent工作流时,一个稳定且可灵活切换的模…...

ubuntu环境下为python项目配置taotoken多模型api密钥与端点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Ubuntu环境下为Python项目配置Taotoken多模型API密钥与端点 1. 准备工作 在Ubuntu系统上为Python项目接入Taotoken,首…...

如何优化 MySQL 千万级数据分页查询的性能?
它的本质是:**传统 LIMIT offset, size 在大数据量下性能急剧下降,是因为 MySQL 必须 扫描并丢弃 前 offset 行数据。当 offset 很大时(如 LIMIT 1000000, 10),MySQL 需要读取 1,000,010 行记录,执行 1,000…...

基于MAX78000的边缘AI语音识别:从模型训练到嵌入式部署实战
1. 项目概述与核心思路最近在捣鼓一个挺有意思的小项目,我把它叫做“声控转向控制器”。简单来说,这玩意儿能听懂你说的几个特定单词,比如“左转”、“右转”、“前进”、“后退”,然后控制对应的LED灯亮起。你可能会想࿰…...

Linux 负载均衡的 cache_nice_tries:缓存友好的迁移尝试
简介现如今服务器、嵌入式设备、工控主板普遍采用多核、NUMA 架构 CPU,多进程多线程并发运行模式成为常态。Linux 内核依靠调度域分层负载均衡机制,分散 CPU 运行压力,避免单核心负载过高、其余核心空闲浪费硬件算力。但任务跨核心迁移是一把…...

AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程
AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想要让你的…...

安卓用户如何免费获取大模型API密钥并开始调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 安卓用户如何免费获取大模型API密钥并开始调用 对于安卓开发者或移动端技术爱好者而言,直接体验和调用多种大模型的能力…...