Open3D 计算点云的面状指数
目录
一、概述
1.1原理
1.2实现步骤
步骤 1:确定邻域点
步骤 2:计算协方差矩阵
步骤 3:特征值分解
步骤 4:计算面状指数
步骤 5:可视化与应用
1.3应用领域
二、代码实现
2.1关键函数
2.2完整代码
三、实现效果
3.1原始点云
3.2面状指数可视化
Open3D点云算法汇总及实战案例汇总的目录地址:
Open3D点云算法与点云深度学习案例汇总(长期更新)-CSDN博客
一、概述
面状指数(Planarity Index)是分析点云局部几何形态的一种重要指标,主要用于评估点云中各点的邻域是否呈现平面结构。它在三维点云数据处理中具有广泛的应用,如特征提取、地形分析、建筑扫描、机器人导航等。
1.1原理
面状指数通过对点云中每个点的邻域点集合进行特征值分解来评估该点邻域的平面性。具体来说,面状指数基于邻域点的协方差矩阵的特征值来计算。特征值的大小反映了点云在不同方向上的扩展程度:
- 最大特征值(λ3):对应于点云在主方向上的扩展程度。如果该特征值远大于其他特征值,表示点云在这一方向上有显著的扩展。
- 中间特征值(λ2):表示点云在次主方向上的扩展程度。
- 最小特征值(λ1):表示点云在第三个方向上的扩展程度。如果该值很小,说明点云在这个方向上几乎没有扩展。
通过特征值的大小和关系,可以判断点云在局部区域的几何形态:
- 如果 λ1 ≈ λ2 ≪ λ3,则该区域更像是一个平面,面状指数较高。
- 如果 λ1 ≈ λ2 ≈ λ3,则该区域呈现的是一个均匀的立体结构,面状指数较低。
1.2实现步骤
步骤 1:确定邻域点
对于点云中的每一个点 p,找到其 k 个最近邻点。这些邻域点用于评估 p 所在局部区域的几何形态。邻域的选择通常使用 KD-Tree 数据结构来加速最近邻搜索。
步骤 2:计算协方差矩阵
对于每个点 p 的邻域点集合,计算这些点的协方差矩阵。协方差矩阵是通过邻域点相对于质心的偏移量来计算的,定义如下:

步骤 3:特征值分解
对协方差矩阵 C 进行特征值分解,得到三个特征值 λ1、λ2、λ3,且满足 λ 1≤λ 2≤λ 3。
λ1:最小特征值,对应点云在最小扩展方向上的伸展程度。
λ2:中间特征值,对应点云在中等扩展方向上的伸展程度。
λ3:最大特征值,对应点云在最大扩展方向上的伸展程度。
步骤 4:计算面状指数
面状指数通过以下公式计算:
该指数度量了点云在该区域内是否具有明显的平面性:
- 高面状指数:表示该点的邻域在局部区域内接近于一个平面(即 λ1和 λ2相近,且远小于 λ3。)
- 低面状指数:表示该点的邻域在局部区域内是一个立体结构,或者是沿一个方向的线状结构。

步骤 5:可视化与应用
计算得到的面状指数可以通过颜色映射可视化,以便分析点云中的平面区域。高面状指数的区域通常代表平面结构,例如建筑物的墙面、地面等。
1.3应用领域
- 建筑扫描:识别建筑物的墙面、屋顶等平面结构。
- 地形分析:在地形数据中识别平坦的区域,如平原、道路等。
- 机器人导航:识别机器人行驶的平面区域,有助于路径规划。
- 三维重建:在三维重建中分离出平面结构,以便精细重建。
二、代码实现
2.1关键函数
def compute_planarity(pcd, k=30):"""计算点云的面状指数(Planarity Index)。参数:pcd (open3d.geometry.PointCloud): 输入点云。k (int): 每个点的邻域点数量。返回:np.ndarray: 面状指数数组,长度与点云中的点数相同。"""# 使用 KD-Tree 来查找每个点的邻域pcd_tree = o3d.geometry.KDTreeFlann(pcd)planarity_indices = np.zeros(len(pcd.points))# 遍历每个点,计算其面状指数for i in range(len(pcd.points)):# 查找邻域点[_, idx, _] = pcd_tree.search_knn_vector_3d(pcd.points[i], k)neighbors = np.asarray(pcd.points)[idx, :]# 计算协方差矩阵cov_matrix = np.cov(neighbors.T)# 计算特征值eigenvalues, _ = np.linalg.eigh(cov_matrix)# 对特征值排序eigenvalues = np.sort(eigenvalues)# 计算面状指数 (Planarity Index)planarity_index = (eigenvalues[1] - eigenvalues[0]) / eigenvalues[2]planarity_indices[i] = planarity_indexreturn planarity_indices
2.2完整代码
import open3d as o3d
import numpy as np
from matplotlib import pyplot as pltdef compute_planarity(pcd, k=30):"""计算点云的面状指数(Planarity Index)。参数:pcd (open3d.geometry.PointCloud): 输入点云。k (int): 每个点的邻域点数量。返回:np.ndarray: 面状指数数组,长度与点云中的点数相同。"""# 使用 KD-Tree 来查找每个点的邻域pcd_tree = o3d.geometry.KDTreeFlann(pcd)planarity_indices = np.zeros(len(pcd.points))# 遍历每个点,计算其面状指数for i in range(len(pcd.points)):# 查找邻域点[_, idx, _] = pcd_tree.search_knn_vector_3d(pcd.points[i], k)neighbors = np.asarray(pcd.points)[idx, :]# 计算协方差矩阵cov_matrix = np.cov(neighbors.T)# 计算特征值eigenvalues, _ = np.linalg.eigh(cov_matrix)# 对特征值排序eigenvalues = np.sort(eigenvalues)# 计算面状指数 (Planarity Index)planarity_index = (eigenvalues[1] - eigenvalues[0]) / eigenvalues[2]planarity_indices[i] = planarity_indexreturn planarity_indices# 加载点云
pcd = o3d.io.read_point_cloud("standford_cloud_data\Armadillo.pcd")
o3d.visualization.draw_geometries([pcd],window_name="原始点云",width=1024,height=768,)
# 计算点云的面状指数
planarity_indices = compute_planarity(pcd)# 可视化面状指数(使用颜色映射)
colors = plt.get_cmap("viridis")(planarity_indices / max(planarity_indices))
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])# 显示点云和面状指数
o3d.visualization.draw_geometries([pcd],window_name="处理后点云",width=1024,height=768,)
三、实现效果
3.1原始点云

3.2面状指数可视化

相关文章:
Open3D 计算点云的面状指数
目录 一、概述 1.1原理 1.2实现步骤 步骤 1:确定邻域点 步骤 2:计算协方差矩阵 步骤 3:特征值分解 步骤 4:计算面状指数 步骤 5:可视化与应用 1.3应用领域 二、代码实现 2.1关键函数 2.2完整代码 三、实现…...

python下麦克风设备选择和录音
import pyaudio import threading import wave import numpy as np def audio_f2i(data, width16):"""将浮点数音频数据转换为整数音频数据。"""data np.array(data)return np.int16(data * (2 ** (width - 1)))def audio_i2f(data, width16)…...

云和集群有什么区别?
我们常说的集群是针对于某项单独的功能或者说是某几个功能的集合体。 举个例子,比方有100台机器组成一个集群,这个集群里面50台机器装了hadoop,10台机器装了spark,剩下40台机器再装一个查询引擎presto。诸如此类,把多…...
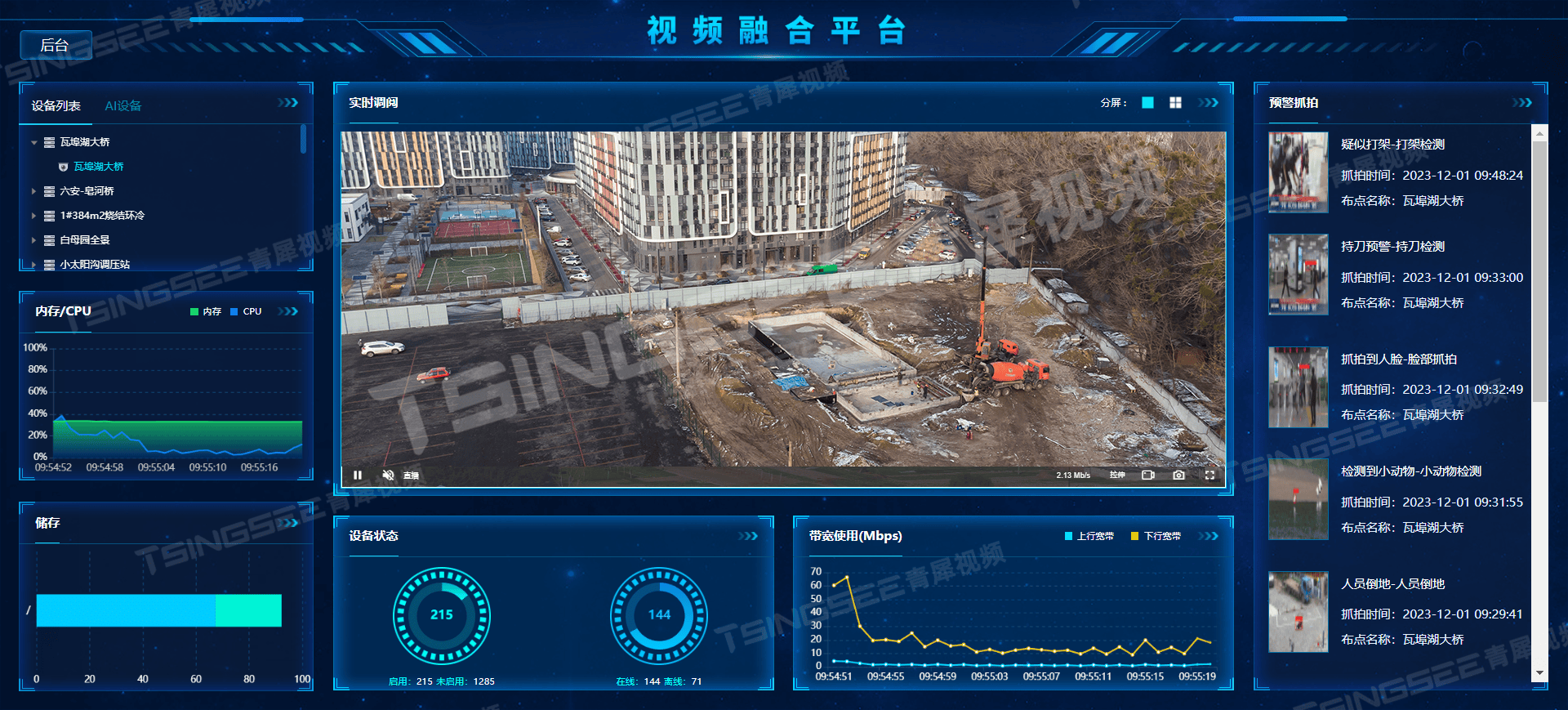
无人机视角下的EasyCVR视频汇聚管理:构建全方位、智能化的AI视频监控网络
随着5G、AI、物联网(IoT)等技术的快速发展,万物互联的时代已经到来,视频技术作为信息传输和交互的重要手段,在多个领域展现出了巨大的应用潜力和价值。其中,EasyCVR视频汇聚平台与无人机结合的AI应用更是为…...

数字影像技术是如何改变我们看待世界的方式呢?
在当今的科技时代,数字影像技术正以惊人的速度改变着我们的生活和视觉体验。那么,什么是数字影像技术呢? 数字影像技术是指通过数字化手段对图像和视频进行获取、处理、存储、传输和展示的一系列技术。 它利用各种数字设备,如数…...
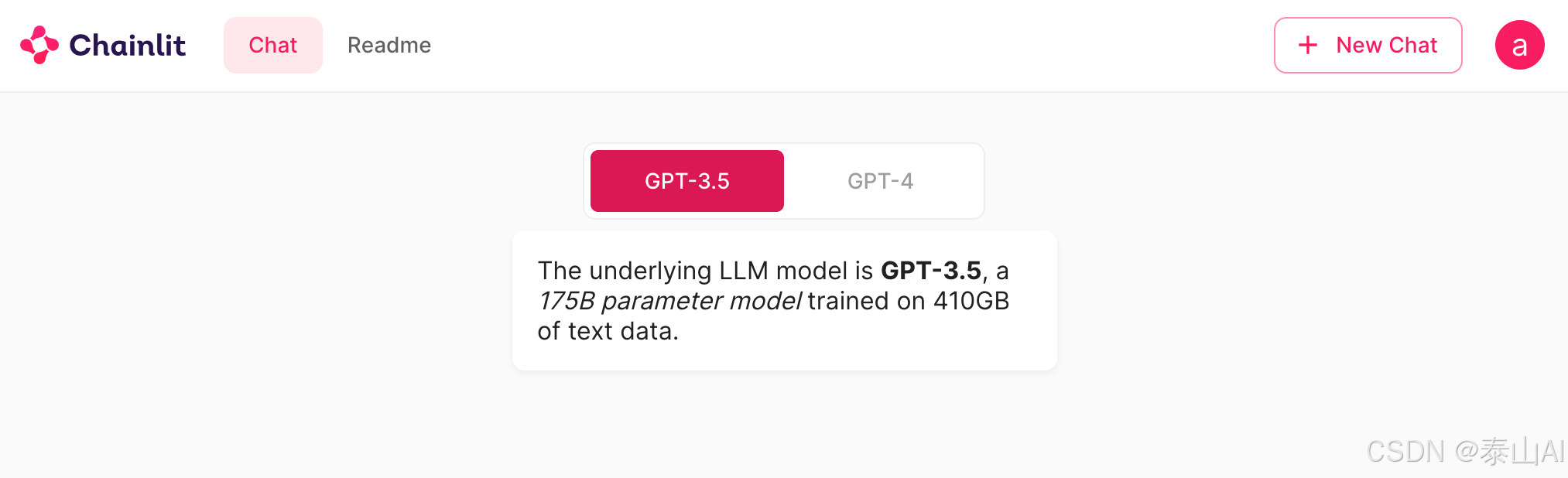
Chainlit实现启动页面选择不同的LLM启动器等设置界面
基本概念:启动选择器(Starters) 启动选择器(Starters) 是一种帮助用户开始与您的助手互动的建议。您可以为助手定义最多4个启动建议,并且可以为每个启动建议指定一个图标。 示例代码 (starters.py) impo…...

SQL - 增、改、删
插入 (insert into) 插入单行 insert into 表名 values ( 对应列的值,用,号间隔) //一般主键值用default,不可填null的不要填null insert into 表名 (需要提供值的列名) values (与之对应的提供的值) //其他的值只需mysql默认提供 insert into 表名 子查…...

怎么屏蔽电脑监控软件?企业管理者的智慧选择——精准定位,合理屏蔽,让监控软件成为助力而非障碍!
电脑监控软件在企业管理中扮演着日益重要的角色,它们能够提升工作效率、保障信息安全、预防内部风险。然而,过度或不当使用监控软件也可能引发员工隐私担忧,影响工作积极性和团队氛围。因此,作为企业管理者,如何精准定…...

Linux·权限与工具-make
1. Makefile/makefile工具 首先展示一下,makefile工具如何使用。我们先写一个C语言程序 然后我们建立一个Makefile/makefile文件,m大小写均可。我们在文件中写入这样两行 wq保存退出后,我们使用 make 命令 可以看到生成了可执行程序ÿ…...

C++的序列容器——数组
前言: 这篇文章我们就开始新的章节,我们之前说的C/C的缺陷那部分内容就结束了。在开始新的章之前我希望大家可以先对着题目思考一下,C的容器是什么?有什么作用?下面让我们开始新的内容: 目录 前言&#x…...

TCC 和 XA 协议之间的区别?
TCC(Two-Phase Commit)协议和XA协议都是用于分布式系统中确保事务原子性的协议。它们在实现分布式事务协调方面有一些相似之处,但也存在一些关键的不同点。 协议的协调者(Coordinator)角色: TCC协议&#x…...
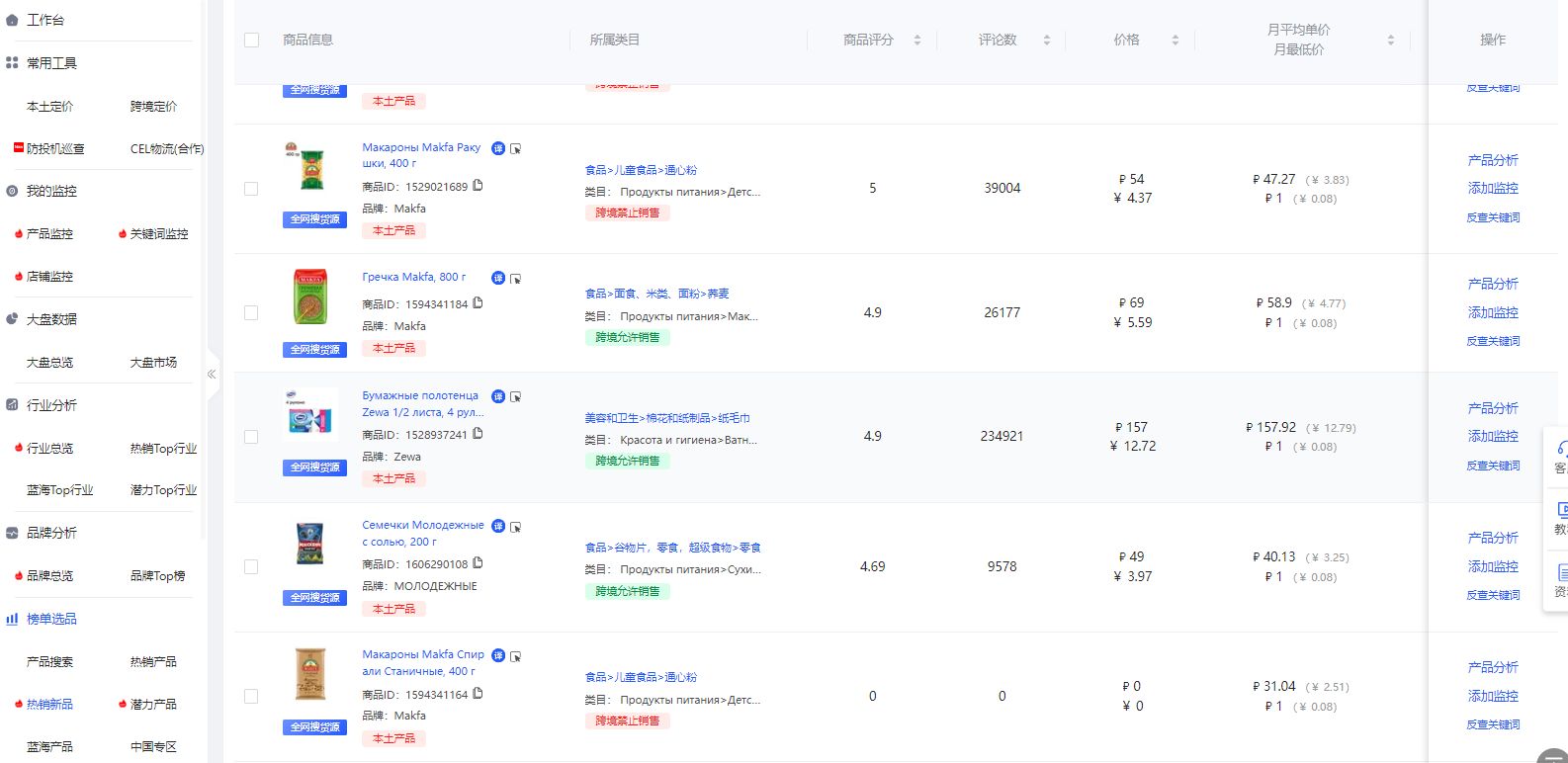
萌啦数据插件使用情况分析,萌啦数据插件下载
在当今数字化时代,数据已成为企业决策与个人分析不可或缺的重要资源。随着数据分析工具的日益丰富,一款高效、易用的数据插件成为了众多用户的心头好。其中,“萌啦数据插件”凭借其独特的优势,在众多竞品中脱颖而出,成…...

C++初学(13)
13.1、for循环的组成部分 for循环的组成部分完成下面这些步骤: (1)设置初始值。 (2)执行测试,看看循环是否应当继续。 (3)执行循环操作。 (4)更新用于测试的值。 C循环设计中包含这要素,很容易识别,初始化、测试和更新操作工…...

目标检测之数据增强
一、概述 数据增强是一种通过人工或自动方式对数据进行修改或变换,以增加数据集规模和多样性的技术。在机器学习中,数据增强被广泛应用于解决数据稀缺、数据不平衡、数据噪声等问题,提高模型的泛化能力和鲁棒性。 二、为什么需要数据增强 …...
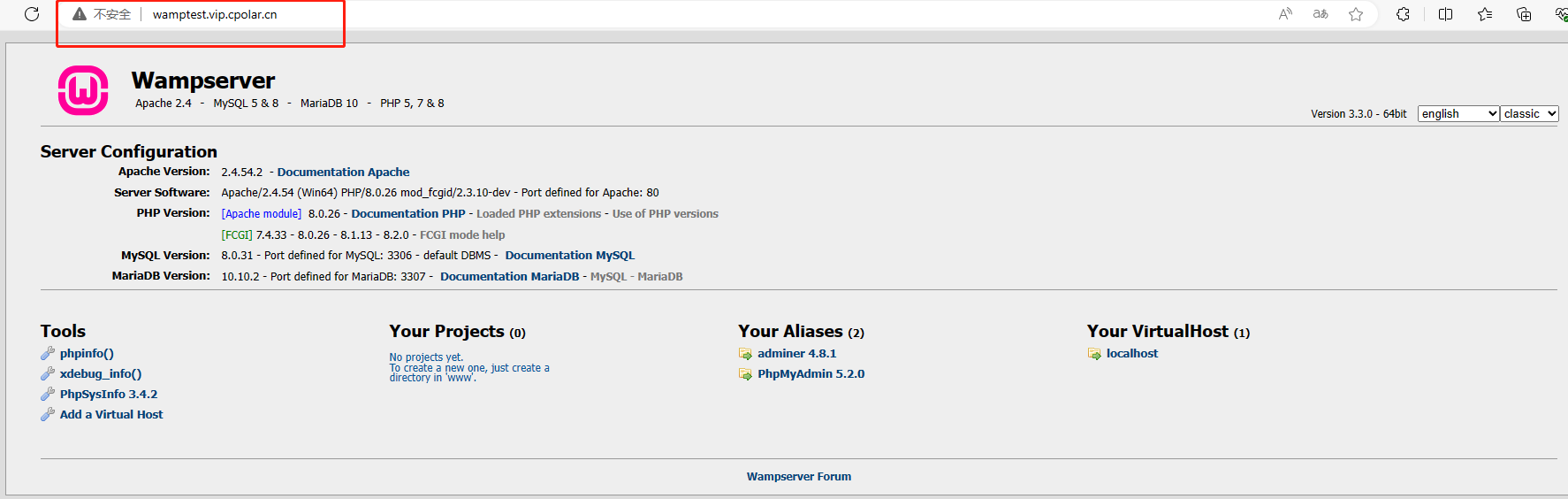
本地下载安装WampServer结合内网穿透配置公网地址远程访问详细教程
文章目录 前言1.WampServer下载安装2.WampServer启动3.安装cpolar内网穿透3.1 注册账号3.2 下载cpolar客户端3.3 登录cpolar web ui管理界面3.4 创建公网地址 4.固定公网地址访问 前言 Wamp 是一个 Windows系统下的 Apache PHP Mysql 集成安装环境,是一组常用来…...

一篇文章理清Java持久化脉络(关于JDBC、JPA、Hibernate、Spring Data JPA)
Java持久化 一、JDBC、JPA、Spring Data JPA 的定义及关系二、JDBC(古老的东西,只需简单知道是啥)1.1 JDBC概念1.2 JDBC示例 三、JPA(第二代持久化,代表是Hibernate等框架)3.1 JPA概念3.2 JPA示例 四、Spri…...

【数学分析笔记】第2章第1节实数系的连续性(1)
2. 数列极限 2.1 实数系的连续性 人类对数系认识的历史: 人类最早对数系的认识是自然数集合 N \mathbb{N} N,自然数系对加法和乘法是封闭的(这里的封闭是指:若 m ∈ N , n ∈ N ⇒ m n ∈ N , m n ∈ N m\in\mathbb{N},n\in\ma…...

Speech Synthesis (LASC11062)
大纲 Module 1 – introductionModule 2 - unit selectionModule 3 - unit selection target cost functionsModule 4 - the databaseModule 5 - evaluationModule 6 - speech signal analysis & modellingModule 7 - Statistical Parametric Speech Synthesis (SPSS)Modu…...

拟合与插值|线性最小二乘拟合|非线性最小二乘拟合|一维插值|二维插值
挖掘数据背后的规律是数学建模的重要任务,拟合与插值是常用的分析方法 掌握拟合与插值的基本概念和方法熟悉Matlab相关程序实现能够从数据中挖掘数学规律 拟合问题的基本提法 拟合问题的概念 已知一组数据(以二维为例),即平面上n个点 ( x i , y i ) …...

《python语言程序设计》2018版第7章第05题几何:正n边形,一个正n边形的边都有同样的长度。角度同样 设计RegularPolygon类
结果和代码 这里只涉及一个办法 方法部分 def main():rX, rY eval(input("Enter regular polygon x and y axis:"))regular_num eval(input("Enter regular number: "))side_long eval(input("Enter side number: "))a exCode07.RegularPol…...

实战应用:基于快马平台从零到一构建功能完备的openclaw101风格项目平台
今天想和大家分享一个实战经验:如何从零开始构建一个功能完备的开源项目托管平台。类似openclaw101这样的网站,其实用现代开发工具和云平台可以快速实现。下面我就把整个搭建过程拆解成几个关键环节,希望能给想做类似项目的朋友一些参考。 项…...

Fiji图像处理软件更新故障排查指南:当科学工具遇到“升级烦恼“
Fiji图像处理软件更新故障排查指南:当科学工具遇到"升级烦恼" 【免费下载链接】fiji A "batteries-included" distribution of ImageJ :battery: 项目地址: https://gitcode.com/gh_mirrors/fi/fiji Fiji作为生物图像分析领域的瑞士军刀…...

Qwen3.5-9B-AWQ-4bit部署指南:双卡RTX 4090-D镜像免配置快速上手
Qwen3.5-9B-AWQ-4bit部署指南:双卡RTX 4090-D镜像免配置快速上手 1. 模型概述 千问3.5-9B-AWQ-4bit是一个支持图像理解的多模态模型,能够结合上传图片与文字提示词,输出中文分析结果。这个量化版本特别适合处理以下任务: 图片主…...

3步搞定黑苹果配置:OpCore-Simplify自动化工具如何解决90%的安装难题
3步搞定黑苹果配置:OpCore-Simplify自动化工具如何解决90%的安装难题 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 开篇:黑苹…...

4月底就要交论文,现在开始降AI率来得及吗?完整应急方案
4月底就要交论文,现在开始降AI率来得及吗?完整应急方案 今天是4月1日。 如果你的论文要在4月底提交,现在翻出来一查,AI率50%,或者知网标红一片——你可能已经开始冒冷汗了。 先别慌。来得及,但要马上开始&a…...

数据库存储有什么作用
数据库存储就是把数据安全、规范、高效地存起来,方便以后用,核心作用可以分成这几块:1. 持久化保存程序关掉、电脑重启,数据不会丢失不像内存一断电就清空,数据库存在硬盘里长期保存2. 统一管理数据把零散的文件、记录…...

当00后测试员给CEO系统提了487个缺陷后
在软件测试领域,一个年轻测试员的行动往往能引发行业深思。故事始于一家科技公司新上线的“CEO决策支持系统”——一个旨在为高管提供实时数据分析和战略建议的核心平台。项目团队信心满满地推进上线,却未料到一位00后测试员小陈的介入,彻底改…...

Synthelix-Auto-Bot终极指南:10分钟掌握多钱包节点自动化管理
Synthelix-Auto-Bot终极指南:10分钟掌握多钱包节点自动化管理 【免费下载链接】Synthelix-Auto-Bot **Automated tool for managing Synthelix nodes across multiple wallets** 项目地址: https://gitcode.com/gh_mirrors/syn/Synthelix-Auto-Bot Synthelix…...

51单片学习ing
现在能够实现LED闪烁了!! 开心 今天学习了让LED闪烁以及LED流水灯,主要是了解了软件延时计算器这个工具 现在可以更灵活的变换LED的变换速度了,如下: 接下来学习到了c语言里模块化的思想,之前学习c的时候…...
合并)
在QT中将多个项目(同代码不同ui和资源文件)合并
Linux下的qt环境 我现在有三个项目,代码一模一样,只有UI文件和资源文件不同现在想要合并代码 后期好上传在git 仅需要一个分支 更好管理将随行 康养 采图三个项目代码合并 思路是这样的 将每个项目都分类打包区分开我是在康养这个项目的基础上合…...