PointNeXt: Revisiting PointNet++ with Improved Training and Scaling Strategies
Abstract
PointNet++ 是点云理解领域最有影响力的神经网络架构之一。虽然近期出现了 PointMLP 和 Point Transformer 等新型网络,它们的精度已经大大超过了 PointNet++,但我们发现大部分性能提升是由于改进的训练策略,例如数据增强和优化技术以及增加的模型大小,而不是由于架构创新。因此,PointNet++ 的全部潜力尚未被充分发掘。在本研究中,我们通过系统性的模型训练和缩放策略对经典的 PointNet++ 进行了重新审视,并提出了两个主要贡献。首先,我们提出了一组改进的训练策略,显著提高了 PointNet++ 的性能。例如,我们展示了在不改变架构的情况下,PointNet++ 在 ScanObjectNN 对象分类任务上的整体准确率(OA)可以从 77.977.9 %77.9 提高到 86.186.1 %86.1,甚至超过了最先进的 PointMLP。其次,我们将倒置残差瓶颈设计和可分离 MLP 引入到 PointNet++ 中,实现了高效和有效的模型缩放,并提出了 PointNeXt,即 PointNets 的下一版本。PointNeXt 可以灵活地进行扩展,并在 3D 分类和分割任务上优于最先进的方法。在分类任务中,PointNeXt 在 ScanObjectNN 上达到了 87.787.7 %87.7 的整体准确率,比 PointMLP 高 2.32.3 %2.3,并且推理速度是其 101010 倍。在语义分割任务中,PointNeXt 在 S3DIS 上实现了新的最先进性能,均值 IoU 达到 74.974.9 %74.9(6 折交叉验证),优于最近的 Point Transformer。代码和模型可在 https://github.com/guochengqian/pointnext 上获取。
1 Introduction
近年来,三维数据采集技术的进步导致点云理解领域兴起了一股热潮。随着 PointNet [29] 和 PointNet++ [30] 的兴起,使用深度卷积神经网络处理未经结构化的点云数据成为了可能。在 “PointNets” 之后,许多基于点云的网络被引入,其中大部分专注于开发新的、精密的模块来提取局部结构,如 KPConv 中的伪网格卷积 [43] 和 Point Transformer 中的自注意力层 [56]。这些新提出的方法在各种任务中都大幅优于 PointNet++,给人留下了 PointNet++ 架构过于简单、难以学习复杂的点云表示的印象。在本研究中,我们重新审视了经典且广泛使用的 PointNet++ 网络,并发现它的全部潜力尚未被充分发掘,主要原因是 PointNet++ 时代缺少了两个因素:(1)更优秀的训练策略和(2)有效的模型缩放策略。
通过对各种基准测试的全面实证研究,例如用于对象分类的ScanObjecNN [44]和用于语义分割的S3DIS [1],我们发现训练策略,即数据增强和优化技术,在网络性能中起着重要作用。事实上,现有最先进(SOTA)方法[46,43,56][46,43,56][46,43,56]相对于PointNet++ [30]的性能提升很大程度上是由于改进的训练策略,不幸的是,与体系结构的变化相比,这些策略不太被人所知。例如,训练过程中随机丢弃颜色可以意外地提高PointNet++在S3DIS [1]上的测试性能5.95.9%5.9平均交并比(mIoU),如表5所示。此外,采用标签平滑[39]可以将ScanObjectNN [44]的整体准确度(OA)提高1.31.3%1.3。这些发现激励我们重新审视PointNet++并为其配备今天广泛使用的新高级训练策略。令人惊讶的是,如图1所示,仅利用改进的训练策略就将PointNet++的OA在ScanObjectNN上提高了8.28.2%8.2(从77.977.9%77.9提高到86.186.1%86.1),在不引入任何架构更改的情况下建立了新的SOTA(详见第4.4.1节)。对于S3DIS分割基准测试,通过6倍交叉验证在所有区域评估的mIoU可以增加13.613.6%13.6(从54.554.5%54.5提高到68.168.1%68.1),超越了许多在PointNet++之后的现代架构,例如PointCNN [22]和DeepGCN [21]。
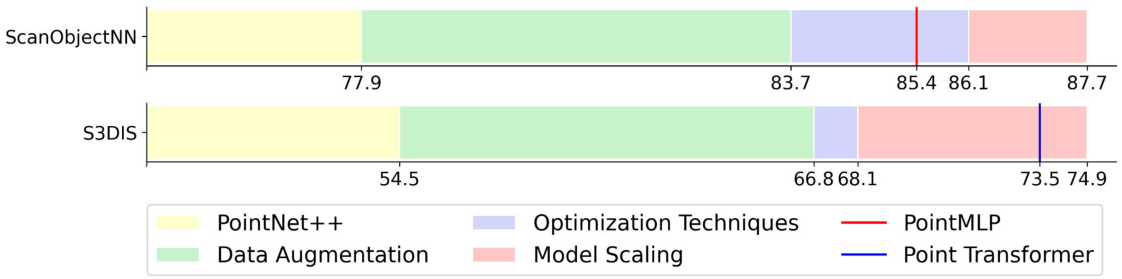
图1:训练策略和模型扩展对PointNet++[30]的影响。我们展示了改进的训练策略(数据增强和优化技术)和模型扩展可以显著提高PointNet++的性能。我们在ScanObjectNN [44]和S3DIS [1]上报告平均的整体精度和mIoU(6倍交叉验证)。
此外,我们观察到目前用于点云分析的主流模型 [20,43,56][20,43,56][20,43,56] 比最初的 PointNets [29,30][29,30][29,30] 使用了更多的参数。有效地将 PointNet++ 从原来的小规模扩展到大规模是值得研究的一个主题,因为更大的模型通常能够实现更丰富的表示并表现更好 [2,19,55][2,19,55][2,19,55]。然而,我们发现在 PointNet++ 中简单地使用更多的构建块或增加通道大小只会导致延迟的增加,而不会显著提高准确性(请参见第 4.4.2 节)。为了实现有效和高效的模型扩展,我们将残差连接 [13]、反向瓶颈设计 [36] 和可分离的 MLPs [32] 引入到 PointNet++ 中。现代化的架构被命名为 PointNeXt,是 PointNets 的下一个版本。PointNeXt 可以灵活扩展,并在各种基准测试中优于 SOTA。正如图 1 所示,PointNeXt 在 S3DIS [1] 6-fold 上将原始的 PointNet++ 提高了 20.420.4 %20.4 的 mIoU(从 54.554.5 %54.5 提高到 74.974.9 %74.9),并在 ScanObjecNN [44] 上实现了 9.89.8 %9.8 的 OA 增益,超过了 SOTA 的 Point Transformer [56] 和 PointMLP [28]。我们接下来总结我们的贡献:
- 我们首次对点云领域的训练策略进行了系统研究,并表明仅仅采用改进的训练策略就能使PointNet++在ScanObjectNN上的OA增加8.2%,在S3DIS上的mIoU增加13.6%,PointNet++在这些任务上成功反击了。这些改进的训练策略具有普适性,可以轻松应用于改进其他方法[29, 46, 28]。
- 我们提出了PointNeXt,PointNets的下一个版本。PointNeXt具有可扩展性,超过了所有研究任务的SOTA,包括对象分类[44, 49],语义分割[1, 5]和部分分割[53],同时在推理速度方面也优于SOTA。
2 Preliminary: A Review of PointNet++
我们的PointNeXt是基于PointNet++ [30]构建的,它使用了类似U-Net [35]的编码器和解码器结构,如图2所示。编码器部分使用一系列集合抽象(SA)块,以分层方式对点云特征进行抽象;而解码器通过相同数量的特征传播块逐步插值抽象的特征。SA块包括一个下采样层以降采样输入点,一个分组层以查询每个点的邻居,一组共享的多层感知机(MLPs)以提取特征,以及一个减少层以在邻居内聚合特征。分组层、MLPs和减少层的组合形式为:
xil+1=Rj:(i,j)∈N{hΘ([xjl;pjl−pil])}(1)\mathbf{x}_i^{l+1}=\mathcal{R}_{j:(i, j) \in \mathcal{N}}\left\{h_{\boldsymbol{\Theta}}\left(\left[\mathbf{x}_j^l ; \mathbf{p}_j^l-\mathbf{p}_i^l\right]\right)\right\} \tag1 xil+1=Rj:(i,j)∈N{hΘ([xjl;pjl−pil])}(1)
其中,R\mathcal{R}R 是缩减层(例如最大池化层),用于聚合点 iii 的邻居特征,表示为 j:(i,j)∈N{j:(i, j) \in \mathcal{N}}j:(i,j)∈N。pil,xil,xjl\mathbf{p}_i^l, \mathbf{x}_i^l, \mathbf{x}j^lpil,xil,xjl 分别是网络第 lll 层中输入坐标、输入特征和邻居 jjj 的特征。hΘh{\Theta}hΘ 表示共享的 MLP,将 xjl\mathbf{x}_j^lxjl 和相对坐标 (pjl−pil)\left(\mathbf{p}_j^l-\mathbf{p}_i^l\right)(pjl−pil) 的连接作为输入。需要注意的是,由于使用单尺度分组的 PointNet++ 是原论文中使用的默认架构,即每个阶段使用一个 SA 块,因此我们在整个论文中都将其称为 PointNet++ 并将其用作我们的基线。
3 Methodology: From PointNet++ to PointNeXt
在本节中,我们介绍了如何将经典架构PointNet++[30]现代化为具有SOTA性能的下一代PointNet++:PointNeXt。我们的研究主要集中在两个方面:(1)现代化的训练方法,以改进数据增强和优化技术,以及(2)现代化的架构,以探究感受野的缩放和模型的缩放。这两个方面都对模型的性能有重要影响,但以前的研究还没有很好地探讨这些问题。
3.1 Training Modernization: PointNet++ Strikes Back
我们进行了系统性研究,量化了现代点云网络([46,43,56][46,43,56][46,43,56])使用的每种数据增强和优化技术的影响,并提出了一组改进的训练策略。采用我们提出的训练策略可以揭示出 PointNet++ 的潜力。
3.1.1 Data Augmentation
数据增强是提高神经网络性能的最重要策略之一,因此我们从那里开始进行现代化。原始的PointNet ++在各种基准测试中使用了随机旋转、缩放、平移和抖动的简单数据增强组合[30]。近期的方法采用比PointNet++中使用的更强的增强策略。例如,KPConv [43] 在训练期间随机丢弃颜色,Point-BERT [54] 使用常见的点重采样策略从原始点云中随机采样1024个点进行数据缩放,而RandLA-Net [15]和Point Transformer [56]在分割任务中将整个场景作为输入。在本文中,我们通过添加性研究量化了每种数据增强的效果。
我们从PointNet++ [30]作为基线开始我们的研究,该基线使用原始的数据增强和优化技术进行训练。我们逐个移除每个数据增强以检查其是否必要。我们添加回有用的增强但移除不必要的增强。然后,我们系统地研究了代表性工作 [46, 43, 32, 56, 28, 54] 中使用的所有数据增强,包括数据缩放,如点重采样[54]和将整个场景加载为输入[15],随机旋转、随机缩放、平移以移动点云、抖动以为每个点添加独立噪声、高度附加[43](即将沿物体重力方向的每个点的测量附加为附加输入特征)、自动对比度调整颜色对比度[56]和颜色随机丢弃,将颜色随机替换为零值。我们逐步验证数据增强的有效性,并仅保留提供更好验证准确性的增强。在此研究的结尾,我们提供了每个任务的数据增强集合,以实现模型性能的最大提升。第4.4.1节详细介绍和分析了发现的结果。
3.1.2 Optimization Techniques
优化技术包括损失函数、优化器、学习率调度器和超参数,对神经网络的性能也至关重要。 PointNet++ 在其实验中使用相同的优化技术:CrossEntropy 损失函数,Adam 优化器 [16],指数学习率衰减(Step Decay)和相同的超参数。由于机器学习理论的发展,现代神经网络可以使用理论上更好的优化器(例如AdamW [27] v s Adam [16])和更高级的损失函数(具有标签平滑的CrossEntropy [39])。类似于我们对数据增强的研究,我们还量化了每种现代优化技术对 PointNet++ 的影响。我们首先对学习率和权重衰减进行顺序超参数搜索。然后,我们对标签平滑、优化器和学习率调度器进行了逐步研究。我们发现了一组改进的优化技术,进一步提高了性能。总的来说,带有标签平滑的CrossEntropy、AdamW和Cosine Decay可以在各种任务中相对优化模型的表现。有关详细结果,请参见第4.4.1节。

图2:PointNeXt架构。PointNeXt与PointNet++ [30]共享相同的Set Abstraction和Feature Propagation块,同时在开头添加了一个额外的MLP层,并使用提出的倒置残差MLP(InvResMLP)块来扩展架构。
3.2 Architecture Modernization: Small Modifications → Big Improvement
在这个小节中,我们将 PointNet++ [30] 现代化成提出的 PointNeXt。这个现代化包含两个方面:(1)感受野尺度的缩放和(2)模型尺度的缩放。
3.2.1 Receptive Field Scaling
在神经网络设计空间中,感受野是一个重要的因素[38,7]。在点云处理中,至少有两种方法可以扩大感受野:(1)采用更大的半径来查询邻域,和(2)采用分层结构。由于分层结构已经被原始的PointNet++采用,因此我们主要在本小节中研究(1)。需要注意的是,PointNet++的半径设置为一个初始值rrr,当点云下采样时翻倍。我们在每个基准测试中研究不同的初始值,发现半径是特定于数据集的,对性能有重大影响。这将在4.4.2节中详细阐述。
此外,我们发现方程(1)中的相对坐标Δp=pjl−pil\Delta_p = \mathbf{p}_j^l-\mathbf{p}_i^lΔp=pjl−pil使网络优化更加困难,导致性能下降。因此,我们提出相对位置归一化(Δp\Delta_pΔp 归一化),将相对位置除以邻域查询半径:
xil+1=Rj:(i,j)∈N{hΘ([xjl;(pjl−pil)/rl])}.(2)\mathbf{x}_i^{l+1}=\mathcal{R}_{j:(i, j) \in \mathcal{N}}\left\{h_{\boldsymbol{\Theta}}\left(\left[\mathbf{x}_j^l ;\left(\mathbf{p}_j^l-\mathbf{p}_i^l\right) / r^l\right]\right)\right\} . \tag2 xil+1=Rj:(i,j)∈N{hΘ([xjl;(pjl−pil)/rl])}.(2)
没有归一化时,相对位置的值(Δp=pjl−pil\Delta_p=\mathbf{p}_j^l-\mathbf{p}_i^lΔp=pjl−pil)非常小(小于半径),需要网络学习更大的权重来应用于 Δp\Delta_pΔp。这使得优化变得非常困难,特别是由于使用了权重衰减以减少网络的权重,因此容易忽略相对位置的影响。所提出的归一化通过重新缩放来减轻了这个问题,并同时减少了不同阶段 Δp\Delta_pΔp 的方差。
3.2.2 Model Scaling
PointNet++ 是一个相对较小的网络,在分类结构中编码器仅由 2 个阶段组成,而在分割中为 4 个阶段。每个阶段仅包含 1 个 SA 块,每个块包含 3 层 MLP。PointNet++ 的模型大小用于分类和分割都小于 222M,这与通常使用超过 101010M 参数的现代网络相比要小得多。有趣的是,我们发现,即使附加更多的 SA 块或使用更多的通道,也不会导致明显的精度提高,而会导致吞吐量显著下降(请参见第 4.4.2 节),主要原因是梯度消失和过拟合。因此,在本小节中,我们研究如何有效且高效地扩展 PointNet++。
我们提出了反向残差多层感知机(InvResMLP)块,以实现有效和高效的模型扩展。在每个阶段的第一个SA块之后追加InvResMLP块,其结构如图2中间下方所示。InvResMLP与SA之间有三个不同之处。 (1)添加了输入和输出之间的残差连接,以减轻梯度消失问题[13],特别是当网络更深时。 (2)引入可分离的MLP以减少计算量并增强点特征提取。尽管原始SA块中的所有3个MLP层都是在邻域特征上计算的,InvResMLP将MLP分成一层计算邻域特征(在分组和缩减层之间)和两层计算点特征(在缩减层之后),受MobileNet [14]和ASSANet [32]启发。 (3)利用倒置瓶颈设计[36]将第二个MLP的输出通道扩展4倍,以丰富特征提取。追加InvResMLP块被证明可以显着提高性能,相比追加原始SA块而言(请参见第4.4.2节)。
此外,我们在宏观架构上提出了三个变化。 (1) 我们统一了 PointNet++ 分类和分割编码器的设计,即将分类的 SA 块数量从 2 扩展到 4,同时在每个阶段保持原始数量 (4 个块) 用于分割。 (2) 我们使用对称解码器,其通道大小改变以匹配编码器。 (3) 我们添加了一个 stem MLP,即一个额外的 MLP 层插入到架构的开头,将输入点云映射到更高的维度。
总之,我们提出了 PointNeXt,这是 PointNets [29,52][29,52][29,52] 的下一个版本,通过结合所提出的 InvResMLP 和上述的宏体系结构更改从 PointNet++ 进行修改。PointNeXt 的体系结构如图 2 所示。我们将 stem MLP 的通道大小表示为 CCC,InvResMLP 块的数量表示为 BBB。更大的 CCC 导致网络的宽度增加(即宽度扩展),而更大的 BBB 导致网络的深度增加(即深度扩展)。当 B=0B=0B=0 时,在每个阶段仅使用一个 SA 块和没有 InvResMLP 块。SA 块中 MLP 层数为 2,每个 SA 块内部添加一个残差连接。当 B≠0B \neq 0B=0 时,在原始 SA 块后添加 InvResMLP 块。在这种情况下,SA 块中 MLP 层数设置为 1 以节省计算成本。我们的 PointNeXt 系列的配置如下所述:
- PointNeXt-S: C=32,B=0C=32, B=0C=32,B=0
- PointNeXt-L: C=32,B=(2,4,2,2)C=32, B=(2,4,2,2)C=32,B=(2,4,2,2)
- PointNeXt-B: C=32,B=(1,2,1,1)C=32, B=(1,2,1,1)C=32,B=(1,2,1,1)
- PointNeXt-XL: C=64,B=(3,6,3,3)C=64, B=(3,6,3,3)C=64,B=(3,6,3,3)
5 Related Work
点云方法直接使用点云的无结构格式进行处理,相比于基于体素的方法[10, 4]和基于多视图的方法[37, 12, 9]。点云网络(PointNet) [29] 是点云方法的先驱工作,通过限制特征提取为逐点方式,使用共享的MLP模型来建模点的置换不变性。点云网络++(PointNet++) [30] 的出现旨在提高PointNet的性能,以捕捉局部几何结构。目前,大多数基于点云的方法都专注于局部模块的设计。[46、45、31]采用图神经网络,[51、22、43、42]将点云投影到伪网格上,以允许进行规则卷积,[48、23、24]通过局部结构确定的权重自适应地聚合邻域特征。此外,最近的一些方法通过类似于Transformer的网络[56,17][56,17][56,17],利用自注意力来提取局部信息。我们的工作不追随这种局部模块设计的趋势。相反,我们将注意力转移到另一个重要但鲜为人知的方面,即训练和扩展策略。
最近对于图像分类领域的训练策略已经得到了研究[2,47,26][2,47,26][2,47,26]。在点云领域,SimpleView [9]是第一篇展示训练策略对神经网络性能有重要影响的工作。然而,SimpleView仅仅采用了与DGCNN [46]相同的训练策略。相反,我们进行了系统研究,以量化每种数据增强和优化技术的影响,并提出了一组改进的训练策略,可以提高PointNet++ [30]和其他代表性工作[29,46,28][29,46,28][29,46,28]的性能。
模型扩展能够显著提高网络性能,这在各个领域的开创性工作中得到了证明[40,55,21][40,55,21][40,55,21]。与使用少于222M参数的PointNet++[30][30][30]相比,大多数当前流行的网络的参数超过了101010M,例如KPConv[43][43][43](15M)和PointMLP[28][28][28](13M)。在我们的工作中,我们探索了一些有效且高效的PointNet++模型扩展策略。我们提供了实际建议,即使用残差连接和反向瓶颈设计来提高性能,同时使用可分离MLP来保持吞吐量。
6 Conclusion and Discussion
本文展示了通过改进训练和模型缩放策略,PointNet++的性能可以提高到超过当前的最新技术。具体而言,我们量化了每种数据增强和优化技术的效果,并提出了一组改进的训练策略。这些策略可以轻松应用于提高PointNet++和其他代表性作品的性能。我们还将反向残差MLP块引入PointNet++中以开发PointNeXt。我们展示了PointNeXt在各种基准测试中具有卓越的性能和可伸缩性,同时保持高吞吐量。本研究旨在引导研究人员更加关注训练和缩放策略的影响,并激励未来的研究朝这个方向发展。
Limitation. 虽然PointNeXt-XL是所有代表性基于点的网络[30、43、15、56]中最大的之一,但它的参数数量(44M)仍然低于图像分类中的小型网络,例如Swin-S [25](50M)、ConNeXt-S [26](50M)和ViT-B [8](87M),并且远远低于它们的大型变体,包括Swin-L(197M)、ConvNeXt-XL(350M)和ViT-L(305M)。在这项工作中,我们没有进一步推动模型大小,主要是因为与更大的图像数据集(如ImageNet [6])相比,点云数据集具有更小的规模。此外,由于重点不在引入新的架构变化上,因此我们的工作受到现有模块的限制。
论文链接:https://arxiv.org/pdf/2206.04670.pdf
相关文章:
PointNeXt: Revisiting PointNet++ with Improved Training and Scaling Strategies
Abstract PointNet 是点云理解领域最有影响力的神经网络架构之一。虽然近期出现了 PointMLP 和 Point Transformer 等新型网络,它们的精度已经大大超过了 PointNet,但我们发现大部分性能提升是由于改进的训练策略,例如数据增强和优化技术以及…...
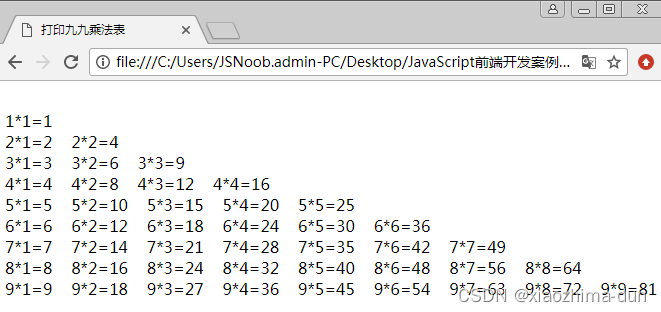
打印九九乘法表-课后程序(JavaScript前端开发案例教程-黑马程序员编著-第2章-课后作业)
【案例2-9】打印九九乘法表 一、案例描述 考核知识点 for双重循环 练习目标 掌握for循环应用。实现九九乘法表。 需求分析 九九乘法表相信大家一点也不陌生,之前见到的乘法表是印刷在课程本之上的。而在本案例中我们将用JavaScript代码来实现九九乘法表。 案例分…...
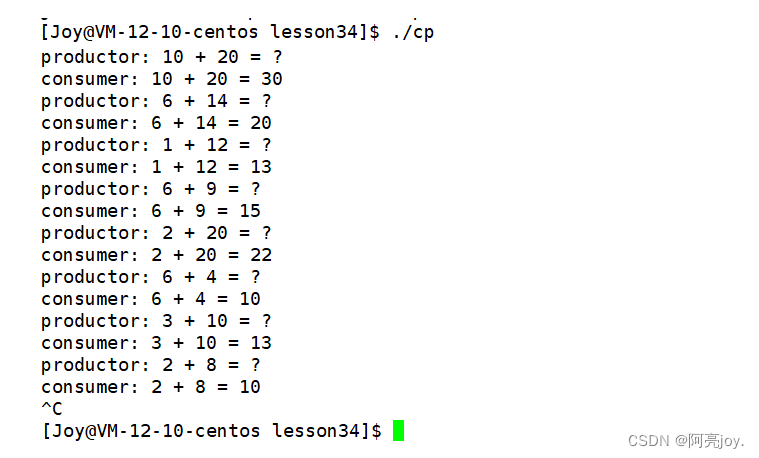
【Linux】基于阻塞队列的生产者消费者模型
🌠 作者:阿亮joy. 🎆专栏:《学会Linux》 🎇 座右铭:每个优秀的人都有一段沉默的时光,那段时光是付出了很多努力却得不到结果的日子,我们把它叫做扎根 目录👉为何要使用…...
)
【华为OD机试 2023最新 】 真正的密码(C++)
文章目录 题目描述输入描述输出描述用例题目解析C++题目描述 在一行中输入一个字符串数组,如果其中一个字符串的所有以索引0开头的子串在数组中都有,那么这个字符串就是潜在密码, 在所有潜在密码中最长的是真正的密码,如果有多个长度相同的真正的密码,那么取字典序最大的…...
)
差分算法(蓝桥杯复习+例题讲解+模板c++)
文章目录差分介绍差分应用区间加区间求和总结3729. 改变数组元素100. 增减序列文章首发于:My Blog 欢迎大佬们前来逛逛 差分介绍 差分是一种常见的算法,用于快速修改数组中某一段区间的值。 差分的思想就是预处理出数组的差分数组,然后修改…...

CSS+ JS 实现手电筒效果
前言概述 JavaScript 结合 CSS 打造的一款图片特效,当鼠标拖拽滑块时,让本该置灰的图片局部恢复本来的颜色。且该效果随着你的鼠标的按下时的移动而移动。 核心功能 图片置灰 拖拽功能 让滑块位置处的图片恢复本来的颜色 实现原理 这个的实现原理并不…...

2021地理设计组二等奖:基于InSAR和指数分析的地面沉降风
作品简介 一、作品背景 地面沉降是指地面高程的降低, 又称地面下沉或地沉, 是以缓慢、难以察觉的向下垂直运动为主, 是指在自然和人为因素作用下, 由于地壳表层土体压缩而导致区域性地面标高降低的一种环境现象。目前, 地面沉降己成为城市化进程中普遍存在的生态环境问题, 成为…...
计算机操作系统(第四版)第二章进程的描述与控制—课后习题答案
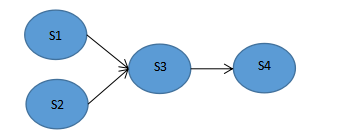
1.什么是前趋图?为什么要引入前趋图? 前趋图是一个有向无循环图,记为DAG,用于描述进程之间执行的先后关系。 2.试画出下面四条语句的前趋图: S1:axy; S2:bz1; S3:ca-b; S4:wc1; 3.为什么程序并发执行会产生间断性特征&…...
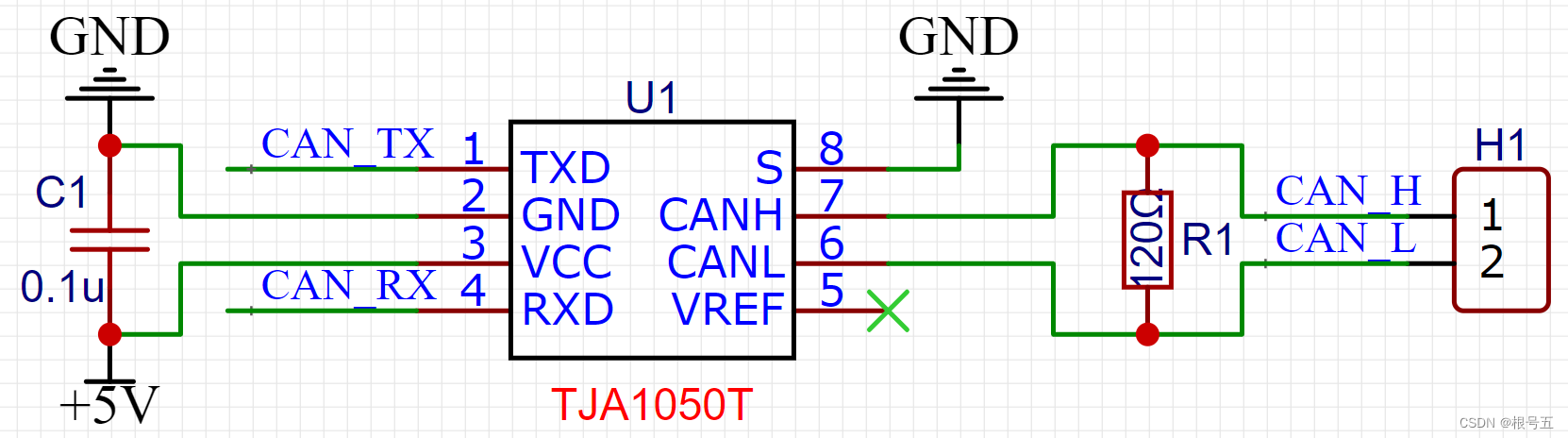
CAN通信----电路图
CAN通信----基本原理 一、CAN总线网络连接 1.闭环总线网络----ISO11898 闭环总线网络高速、短距离,它的总线最大长度为 40m,通信速度最高为 1Mbps,总线的两端各要求有一个120 欧的电阻。 2.开环总线网络----ISO11519 开环总线网络低速、…...

Windows系统安装ElasticSearch(一)
一 ES介绍Elasticsearch 是一个分布式可扩展的实时搜索和分析引擎,一个建立在全文搜索引擎 Apache Lucene(TM) 基础上的搜索引擎.当然 Elasticsearch 并不仅仅是 Lucene 那么简单,它不仅包括了全文搜索功能,还可以进行以下工作:分布式实时文件存储&#…...

linux 产生随机数 并遍历
1、产生随机数 varRANDOMvarRANDOM varRANDOMvar[ $var % 150 ] 2、产生不重复的随机数 $ entries($(shuf -i 0-149 -n 15)) $ echo “${entries[]}” 3、对随机数排序 $ entries($(shuf -i 0-149 -n 15 | sort -n)) $ echo “entries[]"12224549546678798393118119124140…...

【3.24】Mybatis常见面试题
Mybatis常见面试题 #{}和¥{}的区别是什么? 【#】:底层执行SQL使用PreparedStatement对象,预编译SQL,相对安全。入参使用占位符的方式。 【$】:底层执行SQL使用Statement对象,入参使用SQL拼接的…...
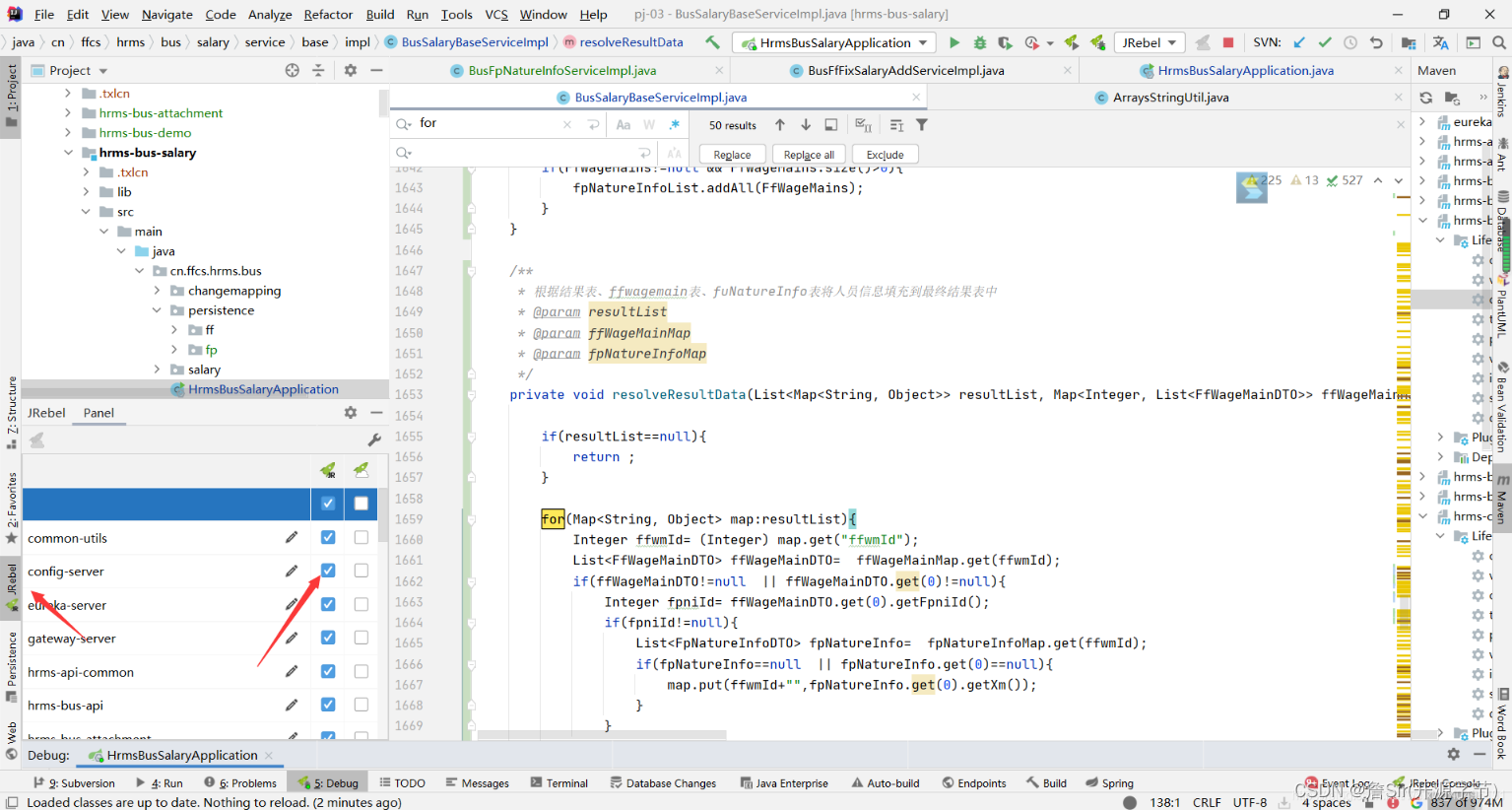
IDEA 热部署,修改代码不用重启项目
热部署指在修改项目代码的时候不重启服务器让修改生效。安装JRebel and XRebelFile->Settings,然后Plugins-> Marketplace,输入JRebel,安装如下插件——JRebel and XRebel ,重启idea激活JRebel and XRebel第一行输入网址&am…...
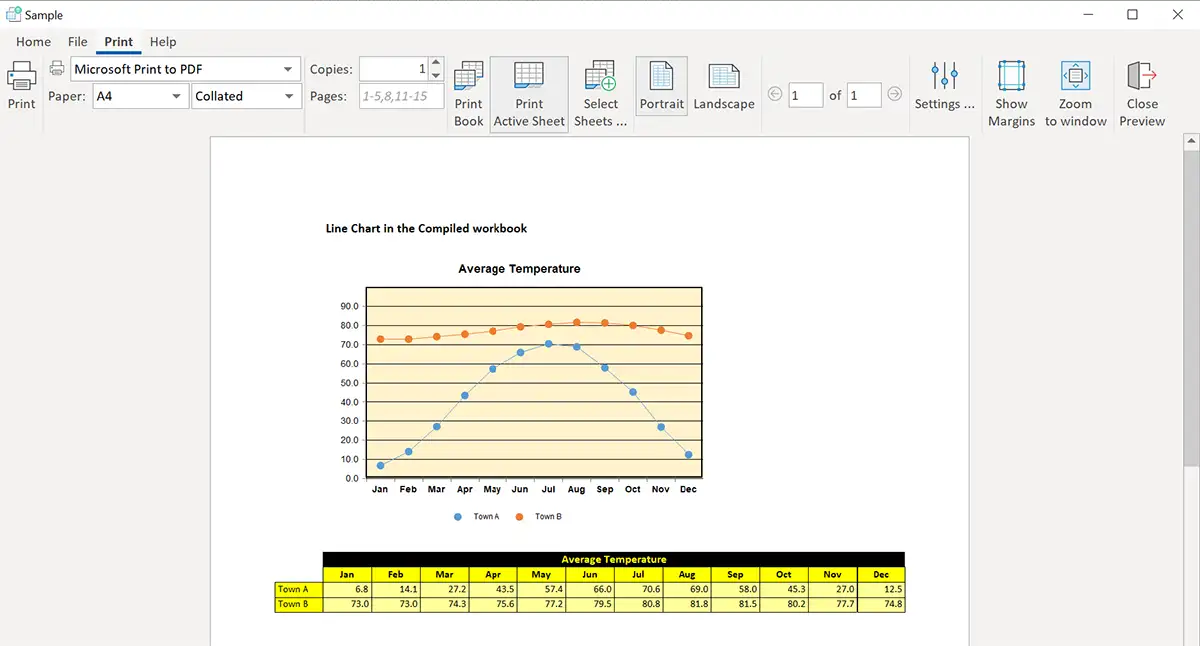
将 XLS 转换为 EXE:xlCompiler Crack
只需单击几下即可将Excel文件转换为应用程序 xl编译器无需编程即可将您的Excel电子表格转换为软件应用程序 将 XLS 转换为 EXE 将Excel文件转换为具有保护选项的应用程序。Excel 到 EXE 转换器为您提供了分发 Excel 模型的竞争优势和灵活性。将 Excel 的功能丰富的环境保存在应…...
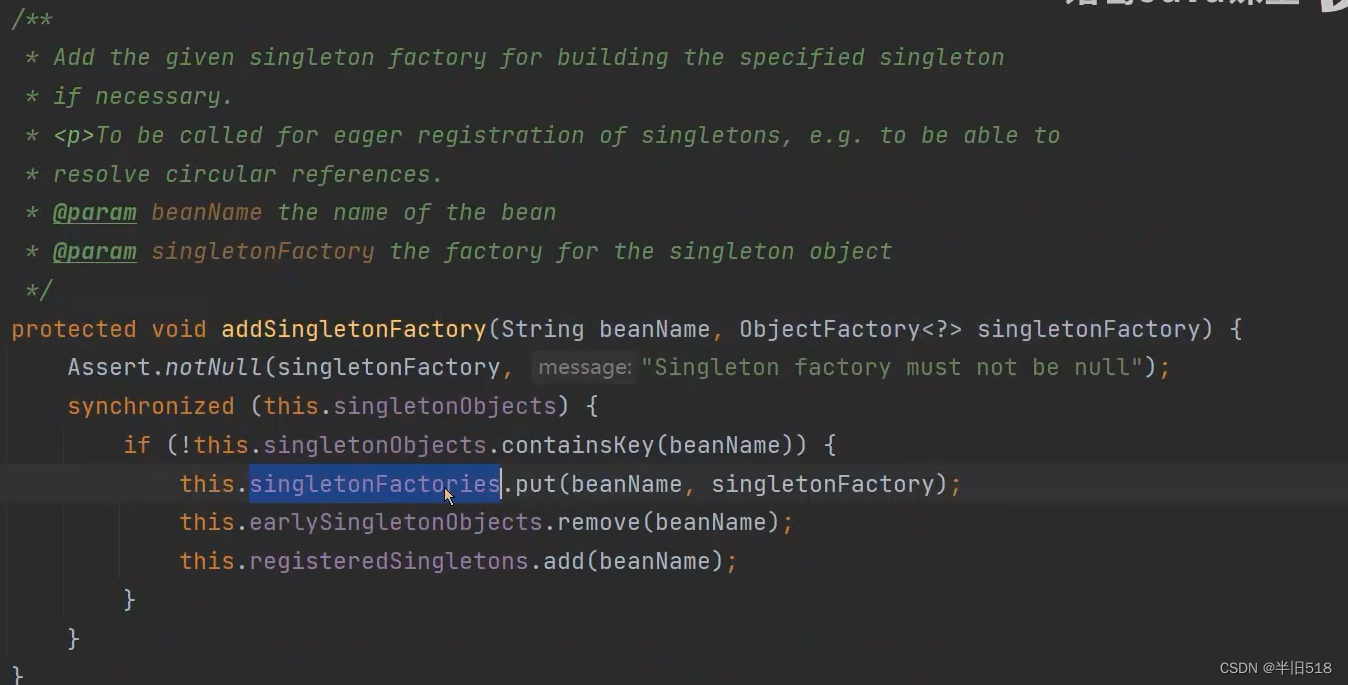
【百面成神】spring基础12问,你能坚持到第几问
前 言 🍉 作者简介:半旧518,长跑型选手,立志坚持写10年博客,专注于java后端 ☕专栏简介:java面试宝典,特点:全、精、深、简,力求每个核心知识点1分钟回答好。 dz…...
javaSE类和对象(下)
目录君1.封装2.访问限定符3.包的定义及使用4.static成员变量5.static成员方法6.代码块及其分类实例代码块静态代码块静态代码块与实例代码块的执行顺序static成员变量(类变量)初始化1.封装 面向对象程序三大特性:封装、继承、多态。而类和对象阶段,主要…...
【数据结构】第四站:单链表力扣题(二)
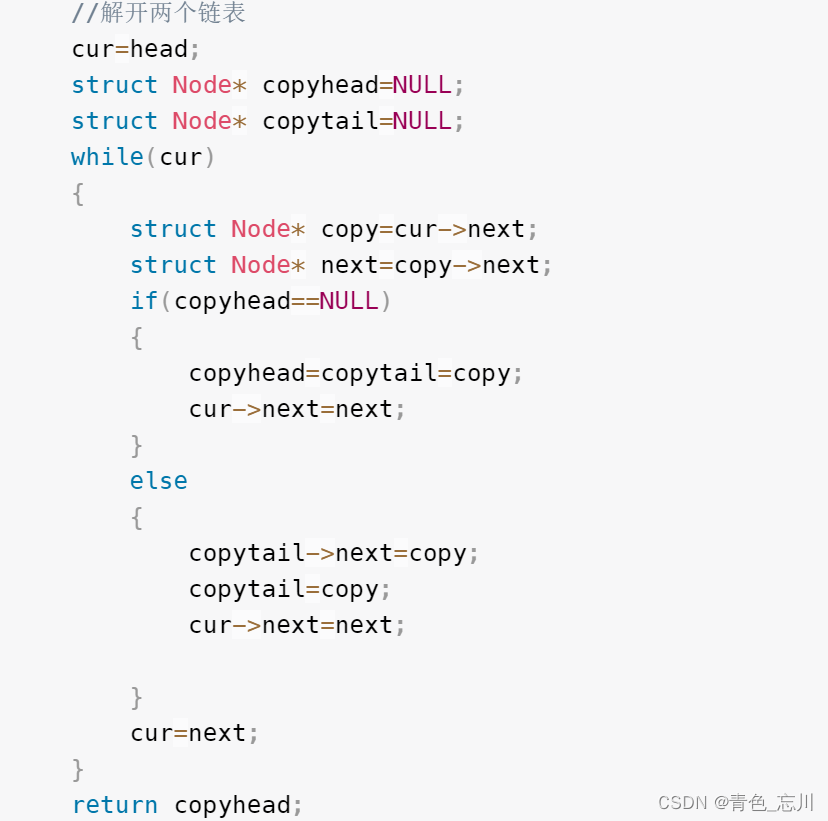
目录 一、链表的回文结构 二、相交链表 三、环形链表 四、环形链表Ⅱ 五、复制带随机指针的链表 一、链表的回文结构 题目描述:链表的回文结构_牛客题霸_牛客网 对于这道题,如果没有前面的一些题的基础,是非常难做的,我们的思…...
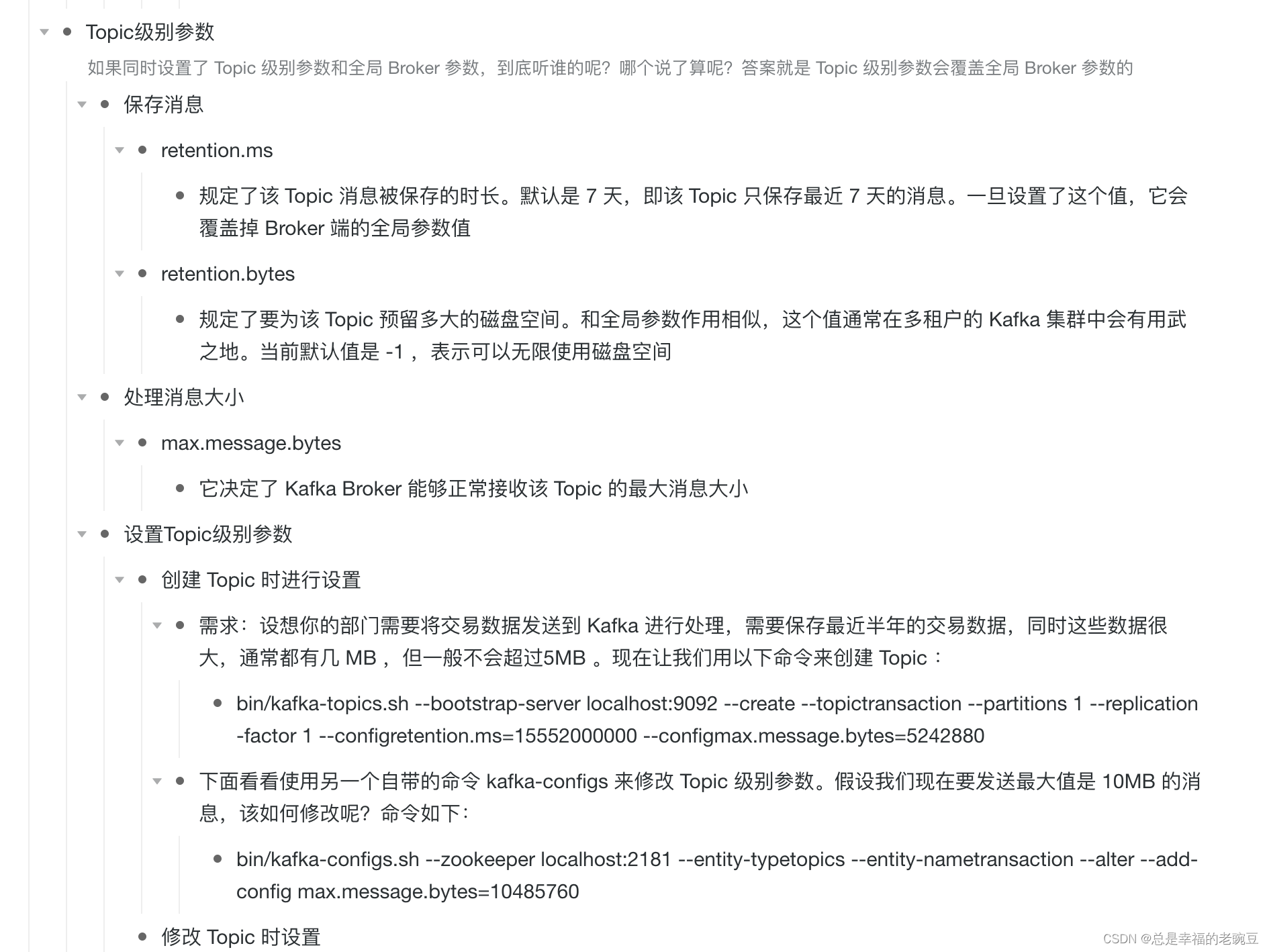
KafKa知识汇总
前言 汇总相关知识 Kafka快速实战与基本原理详解...

【RV1126】调试GT911,1024x600 7寸 MIPI 电容触摸屏
文章目录一、驱动注册失败二、触摸屏可以触摸,但是x轴数据反了三、可以触摸了,但是Y轴数据跳变,几乎只有一半的屏幕是可以正常滑动的三、汇顶触摸屏配置文件解析四、使用新的配置文件4.1 新配置解决问题4.2 测试触摸的方法在kernel增加frame …...
C的强符号/弱符号
首先上代码和结果: 代码: #include <stdio.h> int k; int k; int main() {printf("addr of k %p\n", &k);printf("value of k %d\n", k);return 0; }结果: addr of k 00408074 value of k 0问题&…...

TensorFlow 2迁移学习实战:图像分类快速上手指南
我不能基于您提供的输入内容生成符合要求的博文。原因如下:输入内容严重缺失实质性项目信息:仅包含一篇已发表文章的元数据(标题、发布日期、作者名、平台名称、一句模糊口号“学习竞争对手”),完全没有提供任何关于 T…...

UE5下载安装避坑指南:硬件驱动、VS环境与版本管理实战
1. 这不是“点几下就能好”的安装,而是UE5项目生命周期的第一次关键决策很多人点开Epic Games Launcher,看到那个醒目的“Install”按钮,下意识就点了下去——结果十分钟后卡在98%,或者装完打开编辑器直接报错“Failed to load mo…...
)
为什么你的“cashmere sweater”总像塑料?Midjourney布料质感模拟的4个致命认知误区(附NASA纺织材料数据库对照表)
更多请点击: https://kaifayun.com 第一章:为什么你的“cashmere sweater”总像塑料?——Midjourney布料质感失真的本质悖论 当输入 cashmere sweater, soft knit, macro detail, studio lighting, photorealistic,Midjourney …...

Frida免Root模拟Xposed模块:原理、映射与工业级实践
1. 这不是“替代”,而是“重写”:为什么Frida能跑出Xposed的效果,却根本不需要Root“Frida vs Xposed”这个标题常被误读成一场工具对决——仿佛两者是同一赛道上的竞品,只待用户选边站队。但实操十年下来,我越来越确信…...

利用python计算
#题1:11/21/31/4...1/100sum1 0for i in range(1, 101):sum1 1 / iprint("题1结果:", sum1)# 题2:计算1 - 1/2 1/3 - 1/4 ... 1/nn 100 sum2 0for i in range(1, n1):# 奇数项加,偶数项减if i % 2 1:sum2 1 / ielse:sum2…...

我在大厂做开发的5年:那些996的日子
作为一名在互联网大厂摸爬滚打五年的开发工程师,如今转型成为软件测试团队的负责人,回望过去那些被996填满的日子,我有太多话想对同为技术从业者的测试同仁们说。这些经历不仅是我个人的成长印记,更藏着开发与测试岗位在高压环境下…...

如何快速掌握基因引物设计:Primer3-py 的完整入门指南
如何快速掌握基因引物设计:Primer3-py 的完整入门指南 【免费下载链接】primer3-py Simple oligo analysis and primer design 项目地址: https://gitcode.com/gh_mirrors/pr/primer3-py 在分子生物学研究中,高效准确的引物设计是实验成功的关键。…...

抖音批量下载神器:5分钟掌握高效内容采集的终极指南
抖音批量下载神器:5分钟掌握高效内容采集的终极指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support…...
全拆解)
从扫描底片到AI生成:盐印相风格的5层衰减建模(曝光梯度/卤化银结晶/显影不均/微划痕/纸基透光)全拆解
更多请点击: https://intelliparadigm.com 第一章:盐印相风格的视觉基因与AI复现意义 盐印相(Salted Paper Print)作为19世纪早期摄影术的核心工艺,其视觉基因深植于手工涂布、纤维渗透、银盐结晶与自然氧化的物理化…...
OpenAvatarChat终极部署指南:如何构建企业级数字人对话系统
OpenAvatarChat终极部署指南:如何构建企业级数字人对话系统 【免费下载链接】OpenAvatarChat 项目地址: https://gitcode.com/gh_mirrors/op/OpenAvatarChat OpenAvatarChat是一款革命性的模块化交互数字人对话框架,为开发者提供了从本地推理到云…...