STM32的中断
目录
一、STM32中断概述
二、外部中断控制器EXTI
三、按键中断
四、串口中断
一、STM32中断概述
在处理器中,中断是一个过程,即CPU在正常执行程序的过程中,遇到外部/内部的紧急事件需要处理,暂时中止当前程序的执行,转而去为处理紧急的事件,待处理完毕后再返回被打断的程序处继续往下执行。中断在计算机多任务处理,尤其是即时系统中尤为重要。比如uCOS,FreeRTOS等。
中断能提高CPU的效率,同时能对突发事件做出实时处理。实现程序的并行化,实现嵌入式系统进程之间的切换
进入中断
处理器自动保存现场到堆栈里{PC, xPSR, R0-R3, R12, LR}一旦入栈结束,ISR便可开始执行晚到的中断会重新取ISR地址,但无需再次保存现场退出中断
中断前的现场被自动从堆栈中恢复一旦出栈完成,继续执行被中断打断的指令出栈的过程也可被打断,使得随时可以响应新的中断, 而不再进行现场保存

 NVIC的主要功能
NVIC的主要功能
n Cortex-M0处理器中,每一个外部中断都可以被使能或者禁止,并且可以被设置为挂起状态或者清除状态。处理器的中断可以电平的形式的,也可以是脉冲形式的,这样中断控制器就可以处理任何中断源

Cortex-M0内核可以处理15个内部异常,和32个外部中断。
STM32F051实际上只使用了6个内部异常和28个外部中断。
当异常或中断发生时,处理器会把PC设置为一个特定地址,这一地址就称为异常向量。每一类异常源都对应一个特定的入口地址,这些地址按照优先级排列以后就组成一张异常向量表。
向量化处理中断的好处
统的处理方式需要软件去完成。采用向量表处理异常,M0处理器会从存储器的向量表中,自动定位异常的程序入口。从发生异常到异常的处理中间的时间被缩减。


注:中断和异常的区别:
中断是微处理器外部发送的,通过中断通道送入处理器内部,一般是硬件引起的,比如串口接收中断,而异常通常是微处理器内部发生的,大多是软件引起的,比如除法出错异常,特权调用异常等待。不管是中断还是异常,微处理器通常都有相应的中断/异常服务程序
Ø 3个固定的优先级,都是负值,不能改变Ø 四个可编程优先级,用两个bit位表示,00,01,10,11Ø 优先级越小优先级越高

注:不同优先级的中断同时发生,优先处理优先级编号较小的那个
同样优先级的中断同时发生,中断向量号较小的那个优先响应
二、外部中断控制器EXTI

该器件具有一组配置寄存器。系统配置控制器的主要用途如下:
● 在部分 IO 口上启用或禁用 I2C 超快模式 (Fast Mode Plus) 。
● 重映射部分从 TIM16 和 TIM17 , USART1 和 ADC 的 DMA 触发源到其它
不同的 DMA 通道上。
● 重映射存储器到代码起始区域。
● 管理连接到 GPIO 口的外部中断。
● 管理系统的可靠性特性。
系统配置控制器 (SYSCFG)



三、按键中断


Ø 1、使能相应的时钟Ø2、配置GPIO管脚为中断功能Ø3、设置中断优先级Ø4、使能相应的中断Ø5、实现中断服务程序

__weak表明他是一个若函数可以重写
/* USER CODE BEGIN 2 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin == GPIO_PIN_8){HAL_UART_Transmit(&huart1, "key int\n", 8, 100);}
}这是一个处理中断的回调函数,在里面判断一下是不是GPIO8,然后进行处理
中断优先级和触发方式都可以图形化配置
四、串口中断

void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance == USART1){printf("uart tx end\n");}
}extern uint8_t RX[10] ;
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance == USART1){printf("REV : %x %x\n",RX[0],RX[1]);HAL_UART_Receive_IT(&huart1, RX, 2);}
}/********************************************************************************* File Name : main.c* Description : Main program body******************************************************************************** This notice applies to any and all portions of this file* that are not between comment pairs USER CODE BEGIN and* USER CODE END. Other portions of this file, whether * inserted by the user or by software development tools* are owned by their respective copyright owners.** COPYRIGHT(c) 2017 STMicroelectronics** Redistribution and use in source and binary forms, with or without modification,* are permitted provided that the following conditions are met:* 1. Redistributions of source code must retain the above copyright notice,* this list of conditions and the following disclaimer.* 2. Redistributions in binary form must reproduce the above copyright notice,* this list of conditions and the following disclaimer in the documentation* and/or other materials provided with the distribution.* 3. Neither the name of STMicroelectronics nor the names of its contributors* may be used to endorse or promote products derived from this software* without specific prior written permission.** THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.********************************************************************************/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f0xx_hal.h"
#include "usart.h"
#include "gpio.h"/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV */uint8_t RX[10] = {0};/* Private variables ---------------------------------------------------------*//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*//* USER CODE END PFP *//* USER CODE BEGIN 0 */
int fputc(int ch, FILE *f)
{while(!(USART1->ISR & (1<<7)));USART1->TDR =ch;return ch;
}
/* USER CODE END 0 */int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration----------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */HAL_UART_Transmit_IT(&huart1,"TX INT\n", 7);HAL_UART_Receive_IT(&huart1, RX, 2);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */}/** System Clock Configuration
*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct;RCC_ClkInitTypeDef RCC_ClkInitStruct;RCC_PeriphCLKInitTypeDef PeriphClkInit;/**Initializes the CPU, AHB and APB busses clocks */RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = 16;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){_Error_Handler(__FILE__, __LINE__);}/**Initializes the CPU, AHB and APB busses clocks */RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK){_Error_Handler(__FILE__, __LINE__);}PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART1;PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK1;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){_Error_Handler(__FILE__, __LINE__);}/**Configure the Systick interrupt time */HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);/**Configure the Systick */HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);/* SysTick_IRQn interrupt configuration */HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @param None* @retval None*/
void _Error_Handler(char * file, int line)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */while(1) {}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t* file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */}#endif/*** @}*/ /*** @}
*/ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
相关文章:
STM32的中断
目录 一、STM32中断概述 二、外部中断控制器EXTI 三、按键中断 四、串口中断 一、STM32中断概述 处理器中的中断在处理器中,中断是一个过程,即CPU在正常执行程序的过程中,遇到外部/内部的紧急事件需要处理,暂时中止当前程序的…...
Flink进阶篇-CDC 原理、实践和优化采集到Doris中
简介 基于doris官方用doris构建实时仓库的思路,从flinkcdc到doris实时数仓的实践。 原文 Apache Flink X Apache Doris 构建极速易用的实时数仓架构 (qq.com) 前提-Flink CDC 原理、实践和优化 CDC 是什么 CDC 是变更数据捕获(Change Data Captur…...

看完这篇 教你玩转渗透测试靶机vulnhub——My File Server: 1
Vulnhub靶机My File Server: 1渗透测试详解Vulnhub靶机介绍:Vulnhub靶机下载:Vulnhub靶机安装:Vulnhub靶机漏洞详解:①:信息收集:②:FTP匿名登入:③:SMB共享服务…...
OpenHarmony实战STM32MP157开发板 “控制” Hi3861开发板 -- 中篇
一、前言 我们在 OpenHarmony实战STM32MP157开发板 “控制” Hi3861开发板 – 上篇 中介绍到了,App面板的开发,以及JS API接口的开发和调用。 那么本篇文章,会详解:BearPi-HM Nano开发板,如何实现数据上报和指令接收响应的。 看到这里,可能有同学可能已经知道思路了,因…...
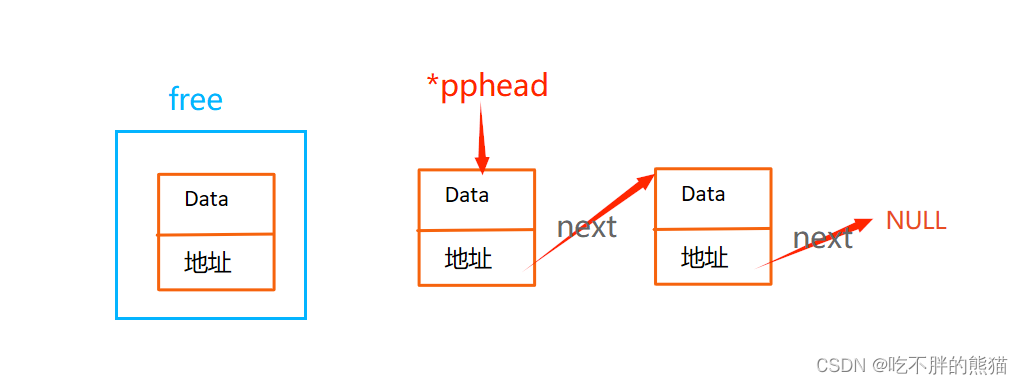
【数据结构初阶】单链表
目录一、思路>>>>>>>>>>>>过程<<<<<<<<<<<<<<<1.打印2.尾插3.尾删4.头插5.头删6.查找7.指定位置后插入8.指定位置后删除9.链表的销毁二、整个程序1.SLTlist.c2.SLTlist.c一、思路 #define …...
多线程代码案例-阻塞队列
hi,大家好,今天为大家带来多线程案例--阻塞队列 这块知识点也很重要,要好好掌握呀~~~ 🌸🌸🌸🌸🌸🌸🌸🌸🌸🌸🌸🌸🌸&#x…...
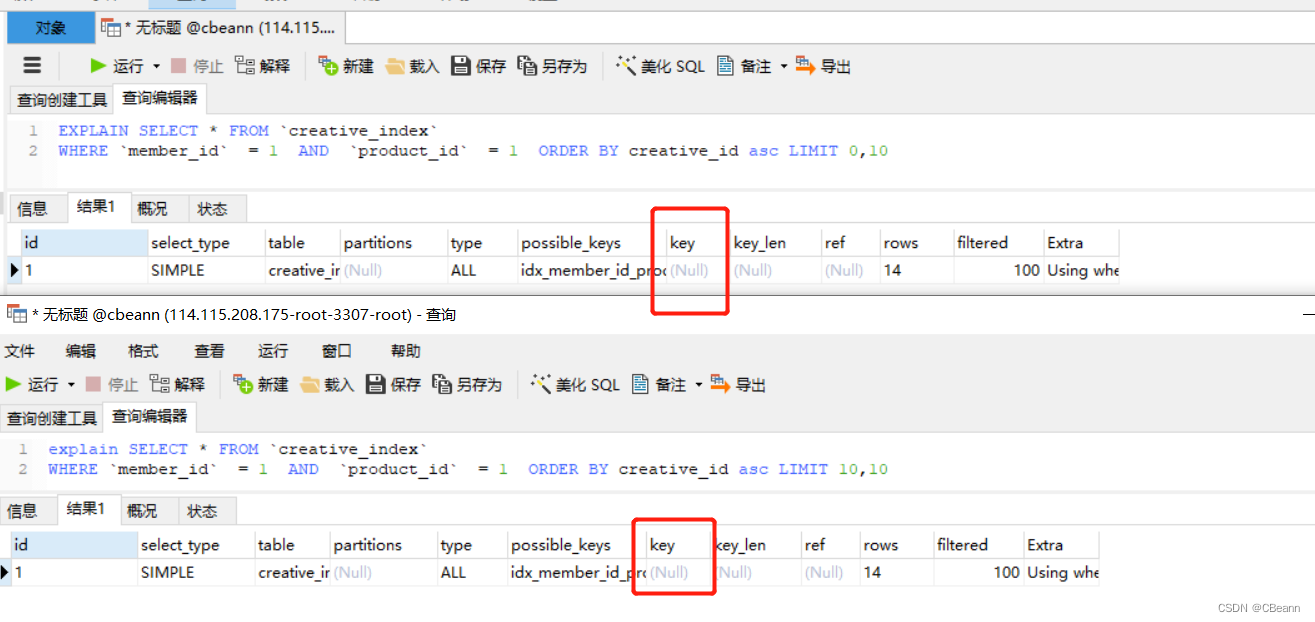
mysql的limit查询竟然有坑?
背景 最近项目联调的时候发现了分页查询的一个bug,分页查询总有数据查不出来或者重复查出。 数据库一共14条记录。 如果按照一页10条。那么第一页和第二页的查询SQL和和结果如下。 .png) 那么问题来了,查询第一页和第二页的时候都出现了11,12,13的记录…...
【Docker】MAC电脑下的Docker操作
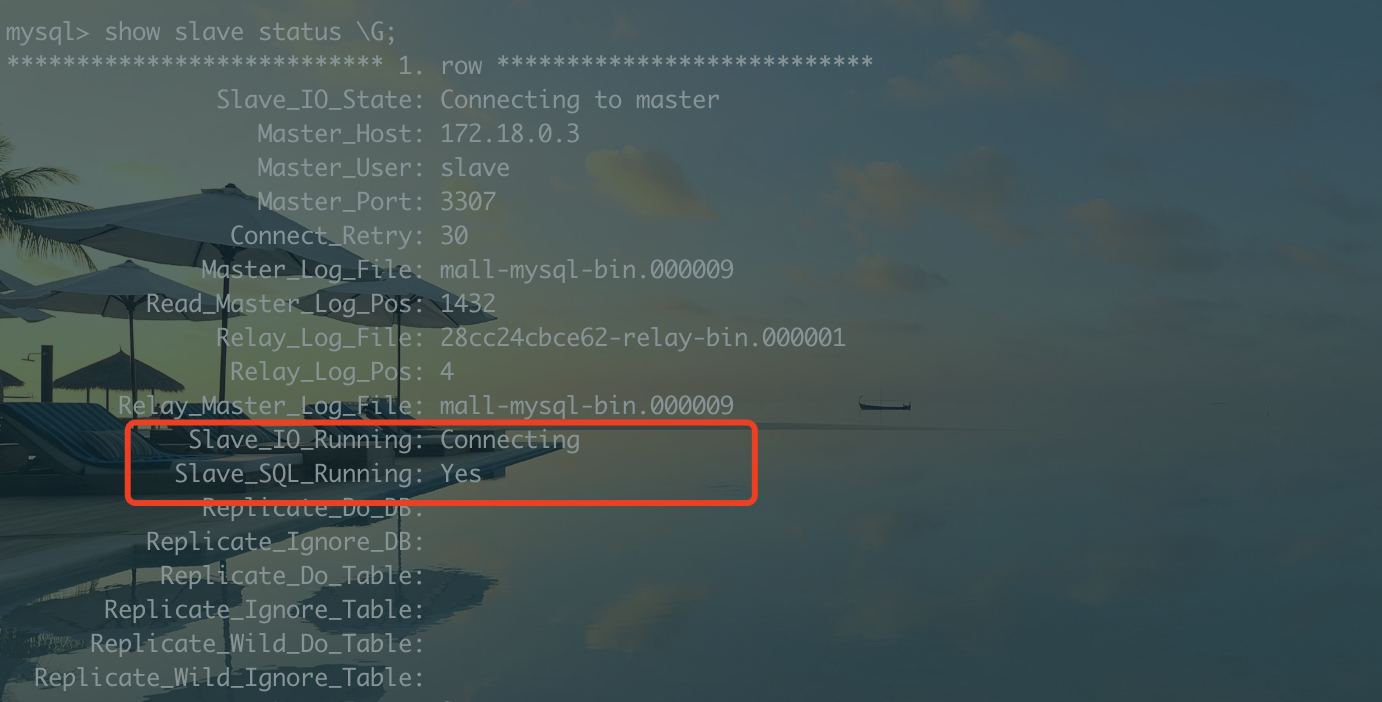
文章目录安装Docker部署mysql 一主一从登录ChatGPT搞方案本地创建一个文件夹编辑docker-compose.yml文件启动检查并编排容器验证基于command的my.cnf配置的加载主数据库建一个用户给子数据库用于主从复制启动主从同步安装Docker 官网地址 https://www.docker.com/ 下载安装 验…...

【Python3】matplotlib,模块,进/线程,文件/xml,百度人脸api,hal/aiohttp/curl
文章目录1.matplotlib/时间复杂度/线性表:顺序表要求存储空间必须连续2.python模块导入:python3 -c ‘import sys;print(sys.path)’ 显示导入模块时会去哪些路径下查找3.进/线程:进/线程是不能随便创建,就像每招一个员工是有代价…...
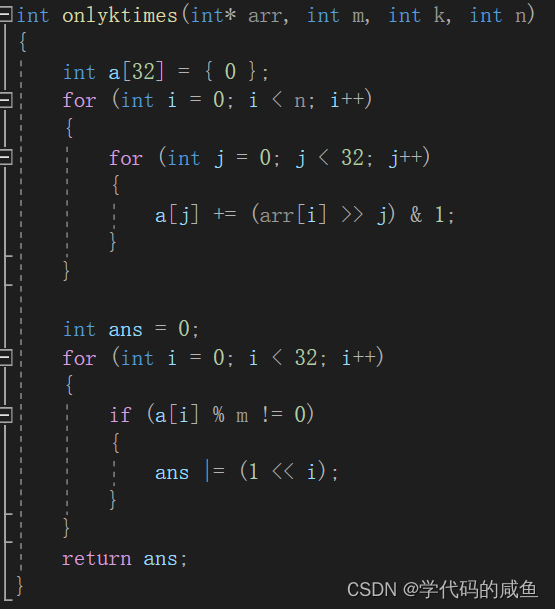
异或相关算法
文章目录1. 异或的性质2. 题目一3. 题目二4. 题目三5. 题目四1. 异或的性质 我们知道,异或的定义是:相同为0,相异为1。所以也被称为无进位相加,根据这定义,我们可以得出三个性质: 1. N ^ N0。2. N ^ 0N。3…...

python 使用pyshp读写shp文件
安装 pip install pyshp 引入 import shapefile读取 sfshapefile.Reader("{路径名}",encodingutf-8) # 仅仅读取 shapes与shape shapessf.shapes() 返回值是一个列表,包含该文件中所有的”几何数据”对象shapesf.shape(0) Shape是第1个”几何数据”…...

eNSP FTP基础配置实验
关于本实验在本实验中,我们通过两台路由器来展示通过FTP在两台路由器之间传输文件。其中一台路由器AR2作为FTP服务器,另一台路由器AR1以FTP的方式登录AR2,并对AR2的文件系统进行一些更改。实验目的熟悉华为网络设备文件系统的管理。掌握华为网…...
堆及其多种接口与堆排序的实现
我们本期来讲解堆结构 目录 堆的结构 堆的初始化 堆的销毁 堆的插入 向上调整算法 堆的删除 向下调整算法 取堆顶元素 判断堆是否为空 堆中元素个数 堆排序 向下调整与向上调整效率计算 Top-K问题 全部代码 堆的结构 堆是一种用数组模拟二叉树的结构 逻辑结构是…...
JNI原理及常用方法概述
1.1 JNI(Java Native Interface) 提供一种Java字节码调用C/C的解决方案,JNI描述的是一种技术。 1.2 NDK(Native Development Kit) Android NDK 是一组允许您将 C 或 C(“原生代码”)嵌入到 Android 应用中的工具,NDK描述的是工具集…...

【Docker】之docker-compose的介绍与命令的使用
🍁博主简介 🏅云计算领域优质创作者 🏅华为云开发者社区专家博主 🏅阿里云开发者社区专家博主 💊交流社区:运维交流社区 欢迎大家的加入! 文章目录docker-compose简介docker-compose基础…...
水果新鲜程度检测系统(UI界面+YOLOv5+训练数据集)
摘要:水果新鲜程度检测软件用于检测水果新鲜程度,利用深度学习技术识别腐败或损坏的水果,以辅助挑拣出新鲜水果,支持实时在线检测。本文详细介绍水果新鲜程度检测系统,在介绍算法原理的同时,给出Python的实…...

flask多并发
多线程 flask默认使用多进程处理请求,因此,是支持并发的。比如两个调用a.html和b.html, 请求a.html未运行完成,在浏览访问b.html不会阻塞。开两个不同浏览器,分别请求请求运行时间较长的a.html也不阻塞。只要不用一个…...

我用Python django开发了一个商城系统,已开源,求关注!
起始 2022年我用django开发了一个商城的第三方包,起名为:django-happy-shop。当时纯粹是利用业余时间来开发和维护这个包,想法也比较简单,Python语言做web可能用的人比较少,不一定有多少人去关注,就当是一个…...
大数据项目之数仓相关知识
第1章 数据仓库概念 数据仓库(DW): 为企业指定决策,提供数据支持的,帮助企业,改进业务流程,提高产品质量等。 DW的输入数据通常包括:业务数据,用户行为数据和爬虫数据等 ODS: 数据…...

RK3588平台开发系列讲解(视频篇)RTP H264 码流打包详解
平台内核版本安卓版本RK3588Linux 5.10Android 12文章目录 一、单 NALU 封包方式二、组合封包方式三、分片封包方式沉淀、分享、成长,让自己和他人都能有所收获!😄 📢 H264 码流是放在 RTP 的有效载荷部分的。因此有效载荷前面的 RTP 头部跟码流本身是没有关系的,所以我…...

如何在Photoshop中构建AI原生工作流:SD-PPP的技术架构解析
如何在Photoshop中构建AI原生工作流:SD-PPP的技术架构解析 【免费下载链接】sd-ppp A Photoshop AI plugin 项目地址: https://gitcode.com/gh_mirrors/sd/sd-ppp 当我们谈论AI与创意工具的结合时,通常面临一个核心挑战:如何在保持专业…...
)
全学科适用AI写作辅助软件排名(2026 精选)
基于功能完整性、学术适配性、用户满意度和操作便捷性,以下是当前主流AI论文写作工具的权威测评结果,按综合使用价值从高到低排序,并详细说明各工具的核心优势与适用领域。🏆 第一梯队:全流程学术解决方案(…...
与返回值)
Python运算符:比较运算符(等于不等等于大于小于)与返回值
Python运算符:比较运算符(等于不等等于大于小于)与返回值📚 本章学习目标:深入理解比较运算符(等于不等等于大于小于)与返回值的核心概念与实践方法,掌握关键技术要点,了…...

AM62x处理器SPI总线实战:从原理到Linux驱动配置与调试
1. 从四根线到高效数据流:深入拆解AM62x处理器的SPI总线实战在嵌入式开发里,和各类传感器、存储芯片、显示屏打交道是家常便饭。当你需要一种简单、高效、引脚又少的通信方式时,SPI总线几乎总是首选方案。它就像一条精心设计的高速公路&#…...

MASA模组中文汉化包:为中文玩家打造的完整界面本地化解决方案
MASA模组中文汉化包:为中文玩家打造的完整界面本地化解决方案 【免费下载链接】masa-mods-chinese 一个masa mods的汉化资源包 项目地址: https://gitcode.com/gh_mirrors/ma/masa-mods-chinese 还在为Minecraft中复杂的英文模组界面而困扰吗?MAS…...

【BUUCTF】【WEB】Unicorn shop
考点:Unicode数字字符,python的int()函数打开题目,发现这个页面很像买东西的网站,一共有四个商品,每个商品的价格不一样,但是第4个的商品最贵,而且超出了其他商品特别多,由此合理猜测…...

Linux查看文件内容
🏷️ 标签:Linux 查看文件 文件类型 Linux命令 运维 后端开发 📝 适用人群:Linux 新手、运维、后端、学生、实训使用 💡 亮点:包含 查看文件类型 查看整个文件 查看部分文件,结构清晰、示例可…...

macOS Homebrew 安装 MySQL
一、安装 MySQL1. 安装完整版 MySQL(服务端全套客户端)# 安装最新版 MySQL brew install mysql说明:brew install mysql 包含服务端 mysqld 命令行客户端 mysql自带工具:mysql、mysqldump、mysqladmin、mysqlshow 等常用运维工具…...

别再瞎找了!2026年不容错过的专业AI论文软件
2026年AI论文写作工具已从“基础生成”升级为智能协同研究系统,核心评价维度包括文献真实性、格式合规性、长文本逻辑、查重降重、AIGC合规与多语言支持。本次测评覆盖6款主流工具,涵盖中文与英文场景、全流程与专项功能、免费与付费版本,让你…...

C++Stack栈类模版实例详解
栈的实现方式分为3种基于静态数组实现,内部预设一个很大的数组对象, 实现简单,缺点是空间受限。基于动态数组实现,内部预设一个容量值,然后分配一段内存空间数组,如果入栈大于默认容量值时,则再次扩大分配新的内存数组,并将旧数组拷贝至新数组及释放旧数组.基于双向…...