蓝桥杯真题——模拟灌溉系统
尽量每天都自己写一遍模板,记住模板就好写了
以下内容直接在模板内进行
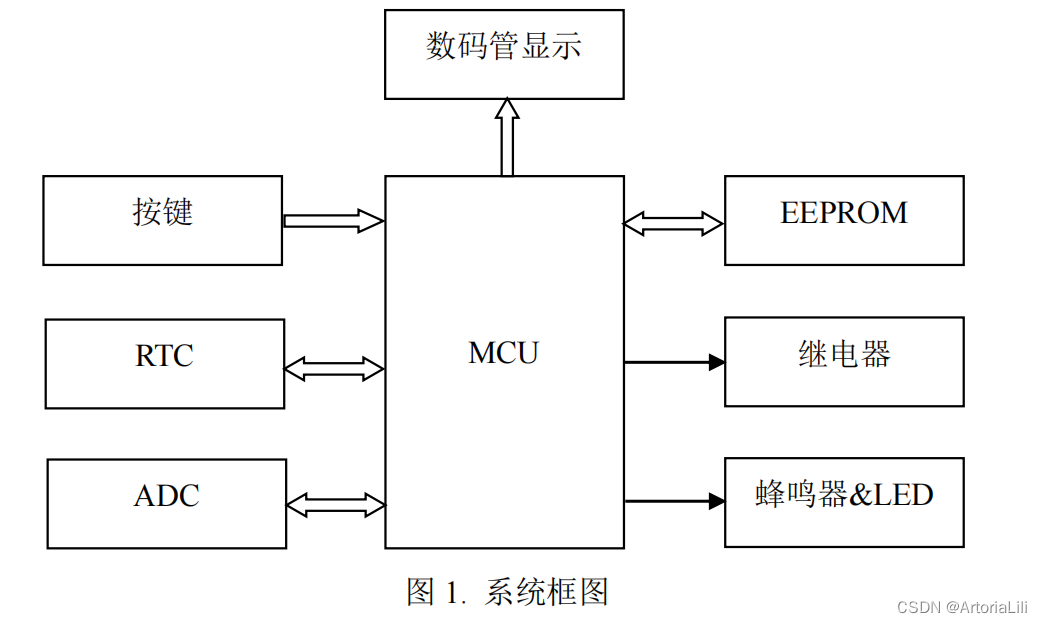
基本任务:要求“模拟智能灌溉系统”能够实现土壤湿度测量、土壤湿度和时间显示、湿度阈值设定及存储等基本功能。通过电位器 Rb2 输出电压信号,模拟湿度传感器输出信号,再通过AD 采集完成湿度测量功能;通过 DS1302 芯片提供时间信息;通过按键完成灌溉系统控制和湿度阈值调整功能,通过 LED 完成系统工作状态指示功能。系统硬件电路主要由单片机控制电路、显示单元、ADC 采集单元、RTC 单元、EEPROM 存储单元、继电器控制电路及报警输出电路组成.
系统功能:
1.1 自动工作状态,根据湿度数据自动控制打开或关闭灌溉设备( 初始状态),以 L1 点亮指示;1.2 手动工作状态,通过按键控制打开或关闭灌溉设备,以 L2 点亮指示;1.3 系统上电后处于自动工作状态,系统初始湿度阈值为 50%,此时若湿度低于50%,灌溉设备自动打开,达到 50%后,灌溉设备自动关闭;1.4 灌溉设备打开或关闭通过继电器工作状态模拟。
我们现在就要一步步进行下去:
1.我们先来实现DS1302
“模拟智能灌溉系统”通过读取 DS1302 时钟芯片相关寄存器获得时间,DS1302芯片时、分、秒寄存器在程序中设定为系统进行初始化设定,时间为 08 时 30 分。开始为 ucRtc(0x80,0x30,0x00)
我们通过读取函数来读取这个时间值 Read_Rtc[ucRtc];然后在主函数设置Set_Rtc(ucRtc);
2. 湿度显示:
以电位器 Rb2 输出电压信号模拟湿度传感器输出信号,且假定电压信号与湿度成正比例关系 H 湿度 = KVRb2(K 为常数),Rb2 电压输出为 5V 时对应湿度为 99%
湿度我们是能够控制的,他就包括了阈值 控制值,以及一个显示值。
Humidity = Ad_Read(0x03) / 2.56;我们让AD读取R3的值给到湿度,之后也可以调试
3.按键功能:
S7为模式切换功能,初始为自动模式,按下后为手动。
自动工作状态下按键 S6、S5、S4 功能设定如下:S6 功能设定为湿度阈值调整按键,按下 S6 后,进入湿度阈值调整界面(如图 3所示),此时按下 S5 为湿度阈值加 1,按下 S4 湿度阈值减 1,再次按下 S6 后,系统将新的湿度阈值保存到 EEPROM 中,并退出湿度阈值设定界面。
这也就是我们再 Mode 0 状态下,通过按键完成的功能加上条件就可以。
4.Led显示模式:
这个比较简单后续再继续补充纤细内容
/* 和参考的区别最大的在于内容写入的内容不同 *//* Í·ÎļþÉùÃ÷Çø */
#include <STC15F2K60S2.H>
#include "LED.h"
#include "key.h"
#include "Seg.h"
#include "HC573.h"
#include "init.h"
#include "ds1302.h"
#include "iic.h"
#include "onewire.h"/* ±äÁ¿ÉùÃ÷Çø */
unsigned char Key_Down,Key_Val,Key_Old,Key_Up;
unsigned char Key_Slow_Down;unsigned char Seg_Buf[8]={10,10,10,10,10,10,10,10};
unsigned char Seg_Point[8]={0,0,0,0,0,0,0,0};
unsigned char Seg_Pos;
unsigned int Seg_Slow_Down;unsigned char ucRtc[3]={0x08,0x30,0x00};
unsigned char ucLed[8]={0,0,0,0,0,0,0,0};unsigned char Seg_Mode = 0;
unsigned char Seg_Mode_set = 0;bit Work_Mode = 0;
bit Beep_Flag = 0;unsigned char Humidity;
unsigned char Hum_Disp = 50;
unsigned char Hum_Ctrol = 50;/* °´¼ü´¦ÀíÇø */
void Key_Proc()
{if(Key_Slow_Down) return;Key_Slow_Down =1;Key_Val = Key_Read();Key_Down = Key_Val & (Key_Old ^ Key_Val);Key_Up = ~Key_Val & (Key_Old ^ Key_Val);Key_Old = Key_Val;switch(Key_Down){case 7:Work_Mode ^= 1; // Çл»Ä£Ê½break;case 6:if(Work_Mode == 0 && Seg_Mode ==0) //×Ô¶¯Ä£Ê½£¬½øÈëãÐֵ״̬{Seg_Mode = 2;}if(Work_Mode == 0 && Seg_Mode ==2 && Seg_Mode_set==1) //Ìø³öÅжÏÌõ¼þ£¬Ð´Èë¿ØÖƲÎÊý{Hum_Ctrol = Hum_Disp;EEPROM_Write(&Hum_Disp,0,1); //±£´æãÐÖµ²ÎÊýSeg_Mode_set=0;Seg_Mode = 0;}break;if(Work_Mode == 1) //ÊÖ¶¯Ä£Ê½{Beep_Flag ^= 1;}break;case 5:if(Seg_Mode == 2 && Work_Mode ==0){Seg_Mode_set = 1;if(++Hum_Disp == 100){EEPROM_Write(&Hum_Disp,0,1); Hum_Ctrol = Hum_Disp; Hum_Disp = 99;}}if(Work_Mode == 1){Relay(1);}break;case 4:if(Seg_Mode == 2 && Work_Mode ==0){Seg_Mode_set = 1;if(--Hum_Disp == 255){EEPROM_Write(&Hum_Disp,0,1);Hum_Ctrol = Hum_Disp; Hum_Disp = 0;}}if(Work_Mode == 1){Relay(0);}break;}}/* Êý¾Ý´¦ÀíÇø */
void Seg_Proc()
{if(Seg_Slow_Down) return;Seg_Slow_Down =1;/* Êý¾Ý¶ÁÈ¡ÇøÓò */Read_Rtc(ucRtc);Humidity = Ad_Read(0x03) / 2.56;/* Êý¾ÝÏÔʾÇøÓò */switch(Seg_Mode){case 0: //ÉϵçÏÔʾʵʱ״̬/* ×Ô¶¯Ä£Ê½ */Seg_Buf[0] = ucRtc[0] / 16;Seg_Buf[1] = ucRtc[0] % 16;Seg_Buf[3] = ucRtc[1] / 16;Seg_Buf[4] = ucRtc[1] % 16;Seg_Buf[2] = 11;// ζÈÏÔʾSeg_Buf[6] = Humidity / 10;Seg_Buf[7] = Humidity % 10;break;case 1:Seg_Buf[0] = ucRtc[0] / 16;Seg_Buf[1] = ucRtc[0] % 16;Seg_Buf[3] = ucRtc[1] / 16;Seg_Buf[4] = ucRtc[1] % 16;Seg_Buf[2] = 11;// ζÈÏÔʾSeg_Buf[6] = Humidity / 10;Seg_Buf[7] = Humidity % 10;break;case 2: //ÏÔʾãÐÖµSeg_Mode_set=1;Seg_Buf[0] = Seg_Buf[1] = 11;Seg_Buf[2] = Seg_Buf[3] = Seg_Buf[4] = 10;Seg_Buf[6] = Hum_Disp / 10;Seg_Buf[7] = Hum_Disp % 10;break;}
}void Led_Proc()
{if(Work_Mode ==0){ucLed[0] = 1;ucLed[1]=0;if(Humidity >=50)Relay(0);elseRelay(1);}if(Work_Mode ==1){ucLed[0] = 0;ucLed[1]=1;Beep(Beep_Flag);}}void Timer0Init(void) //@12.000MHz
{AUXR &= 0x7F; TMOD &= 0xF0; TL0 = 0x18; TH0 = 0xFC; TF0 = 0; TR0 = 1; ET0 = 1; EA = 1;
}void Timer0Server() interrupt 1
{ if(++Key_Slow_Down == 10) Key_Slow_Down = 0;if(++Seg_Slow_Down == 500) Seg_Slow_Down = 0;if(++Seg_Pos == 8) Seg_Pos = 0;Seg_Disp(Seg_Pos,Seg_Buf[Seg_Pos],Seg_Point[Seg_Pos]);Led_Disp(Seg_Pos,ucLed[Seg_Pos]);
}void main()
{Humidity = Ad_Read(0x03) / 2.56; //Ö÷º¯ÊýÔÙ¶ÁÒ»´ÎHum_Disp = Hum_Ctrol; //±ãÓÚ¸ÄÕýEEPROM_Read(&Hum_Disp,0,1);//¶ÁÈ¡ãÐÖµ²ÎÊýSystem_init();Timer0Init();Set_Rtc(ucRtc);while(1){Key_Proc();Led_Proc();Seg_Proc();}
}相关文章:
蓝桥杯真题——模拟灌溉系统
尽量每天都自己写一遍模板,记住模板就好写了 以下内容直接在模板内进行 基本任务:要求“模拟智能灌溉系统”能够实现土壤湿度测量、土壤湿度和时间显示、湿度阈值设 定及存储等基本功能。通过电位器 Rb2 输出电压信号,模拟湿度传感器输出信号…...

【数据结构】双向链表实现
Yan-英杰的主页 悟已往之不谏 知来者之可追 C程序员,2024届电子信息研究生 目录 一、什么是双向链表 二、双向链表的实现 一、什么是双向链表 双向链表也叫双链表,是链表的一种,它的每个数据节点中都有两个指针,分别指向直接后…...
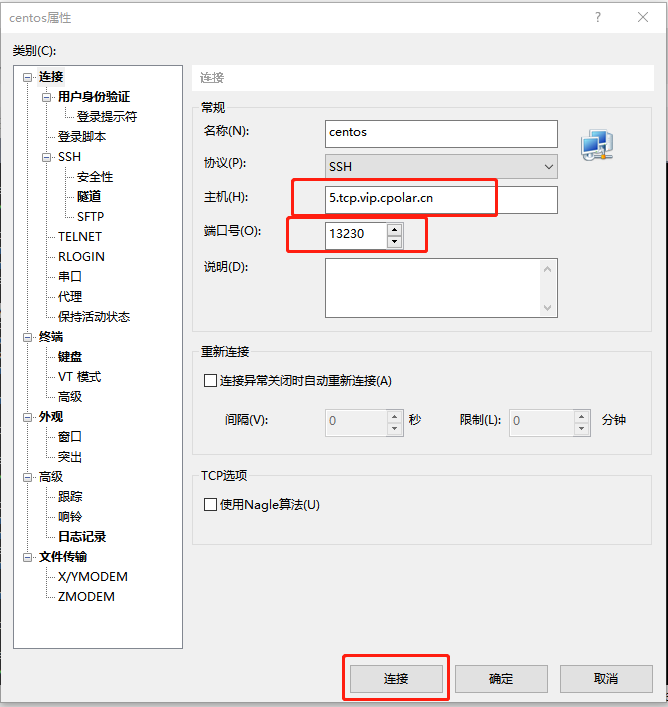
无公网IP,SSH远程连接Linux CentOS服务器【内网穿透】
文章目录1. Linux CentOS安装cpolar2. 创建TCP隧道3. 随机地址公网远程连接4. 固定TCP地址5. 使用固定公网TCP地址SSH远程本次教程我们来实现如何在外公网环境下,SSH远程连接家里/公司的Linux CentOS服务器,无需公网IP,也不需要设置路由器。 …...
CentOS 7+Docker搭建rabbitMQ无法访问15672端口
CentOS 7Docker搭建rabbitMQ无法访问15672端口 1.我拉取的镜像自带管理UI界面 所以不可能是没有开启管理UI界面的原因 2.防火墙关闭状态 所以也不是防火墙的问题 3.在虚拟机本机localhost:15672也访问不了 4.端口监听是正常的 5.最后发现我容器内curl能够通,容…...
面试官:如何保证接口幂等性?一口气说了9种方法!
本文已经收录到Github仓库,该仓库包含计算机基础、Java基础、多线程、JVM、数据库、Redis、Spring、Mybatis、SpringMVC、SpringBoot、分布式、微服务、设计模式、架构、校招社招分享等核心知识点,欢迎star~ Github地址 大家好,我是大彬~ 今…...

蓝桥杯刷题冲刺 | 倒计时14天
作者:指针不指南吗 专栏:蓝桥杯倒计时冲刺 🐾马上就要蓝桥杯了,最后的这几天尤为重要,不可懈怠哦🐾 文章目录1.最长递增2.走迷宫3.解立方根4.回文特判5.修改数组1.最长递增 题目 链接: 最长递增…...
【数据结构】树的概念
Halo,这里是Ppeua。平时主要更新C语言,C,数据结构算法......感兴趣就关注我吧!你定不会失望。 🌈个人主页:主页链接 🌈算法专栏:专栏链接 我会一直往里填充内容哒! &…...

Qt Glog toStdWString转char* 中文乱码
#include <QTextCodec>void LogWriter::init(void) {InitGoogleLogging("ui-fundus");char log_path[256] {0};FLAGS_stderrthreshold GLOG_INFO; // INFO WARNING ERROR FATAL, 是输出到stderr(app Output/cli)的阀值FLAGS_alsologtostderr false; // 当这…...

基于线性Kalman观测器(LKF)的2、4、7自由度悬架主动控制合集
目录 前言 1. 1/4车悬架仿真分析 2. 1/2车悬架仿真分析 3. 整车车悬架仿真分析 3.1 KF观测状态 3.2性能指标 4 .KF调参总结 5.文章总结 前言 对于kalman的原理介绍在上篇文章中已经做了详尽剖析,本篇进行实战,将其应用于悬架系统,其实…...
第二章 作业(6789B)【编译原理】
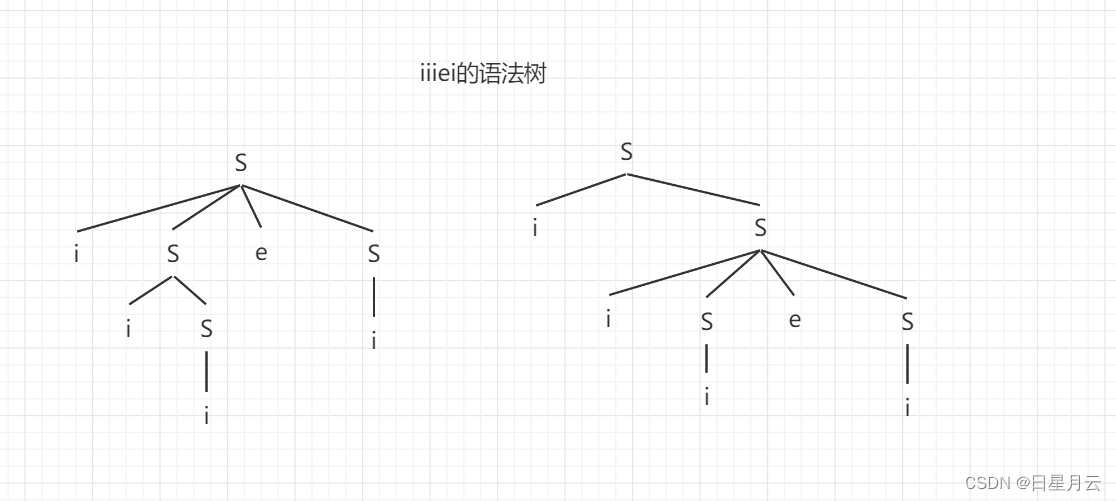
第二章 作业【编译原理】前言推荐第二章 作业678911最后前言 以下内容源自《编译原理》 仅供学习交流使用 推荐 无 第二章 作业 6 6.令文法G6为 N→D|ND D→0|1|2|3|4|5|6|7|8|9 (1)G6的语言L(G6)是什么? (2)给出句子0127、34和568的最左推导和最右推导。 (…...
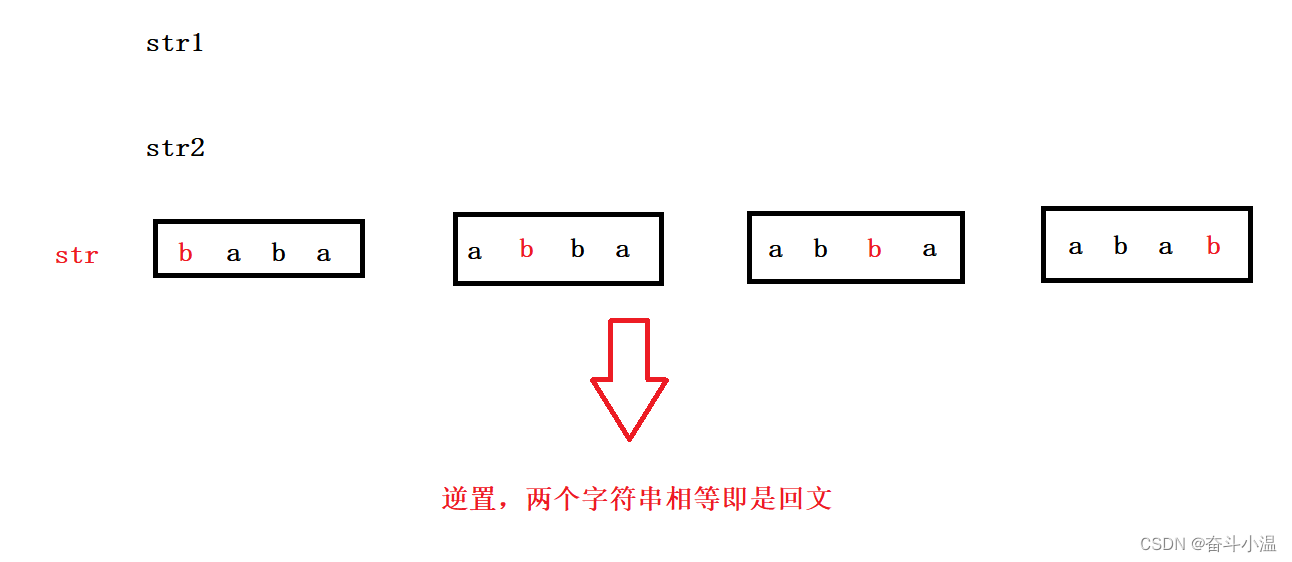
【java】连续最大和、统计回文
目录 1.连续最大和 2.统计回文 1.连续最大和 链接:连续最大和_牛客题霸_牛客网 (nowcoder.com) 描述:一个数组有 N 个元素,求连续子数组的最大和。 例如:[-1,2,1],和最大的连续子数组为[2,1],其和为 3 输…...

AI真的快让我们失业了,从ChatGPT到Midjourney
参考文章: https://mp.weixin.qq.com/s/3RdHPPhYgDfB6KY6Y9Sk2A跟AI有关的新闻,一个接着一个。前一天你还和往常一样进入梦乡,第二天醒来就能被新的AI新闻“炸弹”震得心惊。 以ChatGPT为代表的AI语言模型,以Midjourney为代表的…...

JVM学习 GC垃圾回收机制 (堆内存结构、GC分类、四大垃圾回收算法)
🤖 作者简介:努力的clz ,一个努力编程的菜鸟 🐣🐤🐥 👀 文章专栏:《JVM 学习笔记》 ,本专栏会专门记录博主在学习 JVM 中学习的知识点,以及遇到的问题。 …...

ChatGPT 有哪些神奇的使用方式?
ChatGPT在语言处理领域有着非常广泛的应用,可以用来进行语音识别、文本摘要、问答系统、机器翻译、智能客服、情感分析、智能写作等方面的应用。随着技术的不断发展和进步,ChatGPT在未来的应用场景和领域也将会有更加广泛的拓展和应用。ChatGPT可以应用于…...
【JavaEE】Java设计模式-单例模式(饿汉式与懒汉式)
目录 1.设计模式是啥? 2.单例模式 2.1什么是单例模式 2.2饿汉模式 2.3懒汉模式 3.懒汉模式与饿汉模式的区别 3.1.线程安全方面 3.2.资源加载和性能 4.如何保证懒汉模式的线程安全 1.设计模式是啥? 设计模式是前人经过总结,通过…...

(算法基础)朴素版Prim算法
适用情景在最小生成树问题当中,涉及到权重和最小值。并且这个图是稠密图(n^2 ~ m)的情形下时间复杂度O(N^2)算法解释先得知道一下什么是无向图的生成树,树总该知道的吧,生成树就是包含这个无向图中的n个点,并且有n-1条边ÿ…...

第十四届蓝桥杯三月真题刷题训练——第 23 天
目录 第 1 题:长草 题目描述 输入描述 输出描述 输入输出样例 运行限制 代码: 思路: 第 2 题:蓝肽子序列_LCS_最长公共子序列dp问题 题目描述 输入描述 输出描述 输入输出样例 运行限制 代码: 思路&am…...
基于springboot实现医院信息管理系统【源码+论文】
基于springboot实现医院信管系统演示开发语言:Java 框架:springboot JDK版本:JDK1.8 服务器:tomcat7 数据库:mysql 5.7 数据库工具:Navicat11 开发软件:eclipse/myeclipse/idea Maven包…...
CODESYS增量式PID功能块(ST完整源代码)
增量式PID的详细算法公式和博途源代码,请参看下面的文章链接: 博途1200/1500PLC增量式PID算法(详细SCL代码)_博图scl语言pid增量编码器_RXXW_Dor的博客-CSDN博客SMART200PLC增量式PID可以参看下面这篇博文,文章里有完整的增量式PID算法公式,这里不在赘述西门子SMARTPLC增量…...
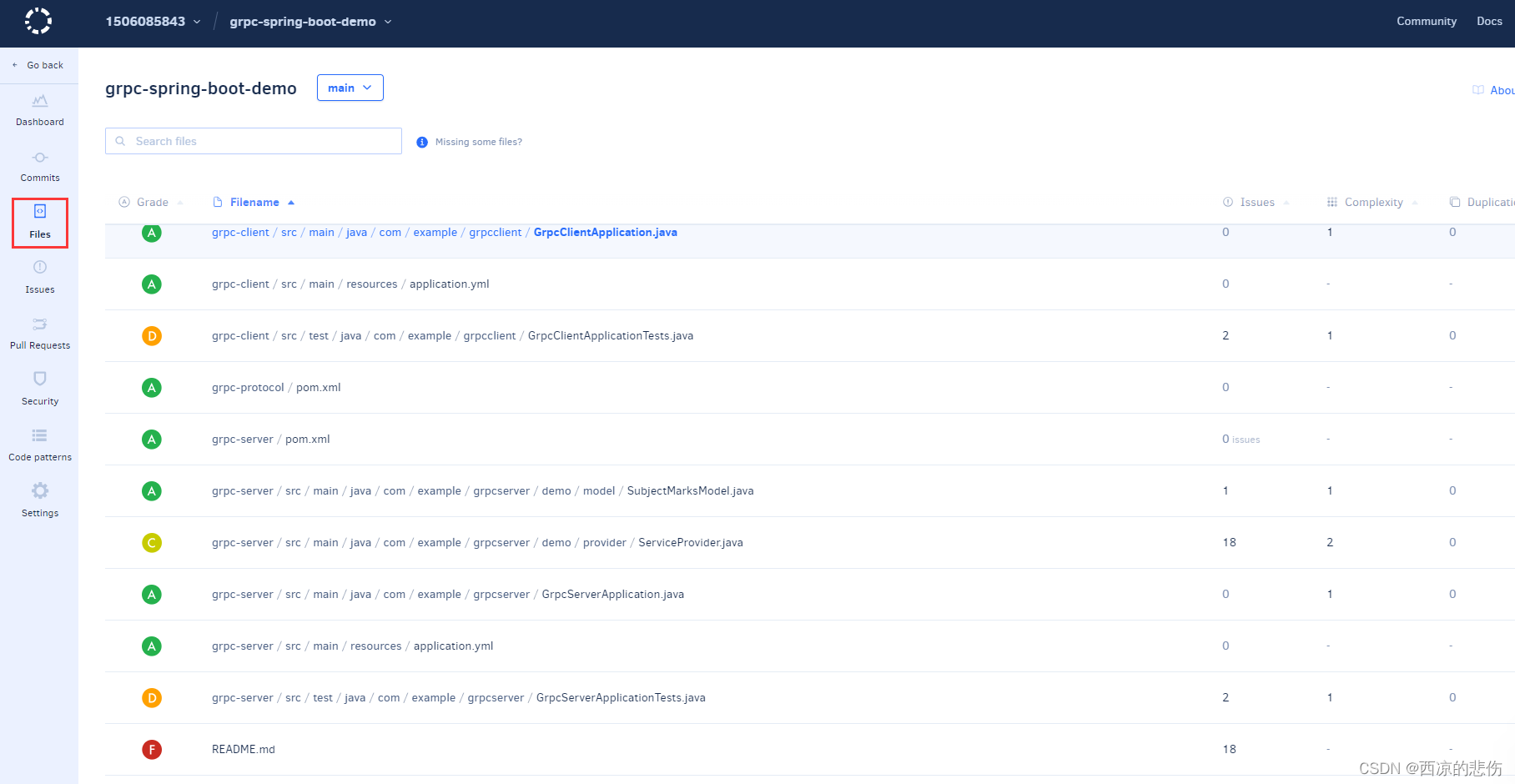
代码质量提升,代码扫描 review 之 Codacy 工具使用
目录一、什么是Codacy二、GitHub 上使用 Codacy三、Codacy上导入GitHub项目一、什么是Codacy Codacy 是用于代码 review 检测(即代码审查)的工具,目前支持对40多种编程语言检测,如 c、c、c#、java 、python、javascript 等。 Codacy 可用于 GitHub 和 …...

AutoGPT失控事件:烧毁$1M云账单的灾难复盘
失控的智能代理在生成式AI技术加速落地的浪潮中,AutoGPT凭借其自主任务分解与执行的能力,被誉为迈向通用人工智能的关键一步。它不再是一个被动的问答机器,而是能主动思考、调用工具、不断逼近目标的智能代理。然而,在2025年末&am…...

Analog入门指南:如何在5分钟内搭建你的第一个Angular全栈应用
Analog入门指南:如何在5分钟内搭建你的第一个Angular全栈应用 【免费下载链接】analog The fullstack meta-framework for Angular. Powered by Vite and Nitro 项目地址: https://gitcode.com/gh_mirrors/an/analog Analog是一个功能强大的Angular全栈元框架…...

颠覆式数据处理解决方案:CyberChef实现复杂数据转换的全流程优化
颠覆式数据处理解决方案:CyberChef实现复杂数据转换的全流程优化 【免费下载链接】CyberChef The Cyber Swiss Army Knife - a web app for encryption, encoding, compression and data analysis 项目地址: https://gitcode.com/GitHub_Trending/cy/CyberChef …...

iMeta | 浙江农科院卢立志/曾涛联合中南大学湘雅医院揭示人参皂苷Rg3缓解肝脏铁死亡的新机制
点击蓝字 关注我们一种生物活性人参皂苷改善非酒精性脂肪性肝炎中氧化磷脂积累引起的肝细胞铁死亡iMeta主页:http://www.imeta.science研究论文● 原文: iMeta(IF 33.2, 中科院双一区Top)● 英文题目: A bioactive ginsenoside alleviates hepatocellular ferroptos…...
)
intv_ai_mk11实际作品:10组真实业务提示词生成结果(含政务/教育/金融)
intv_ai_mk11实际作品:10组真实业务提示词生成结果(含政务/教育/金融) 1. 模型能力概览 intv_ai_mk11是基于Llama架构的中等规模文本生成模型,特别适合处理通用问答、文本改写、解释说明等任务。通过本地部署的Web界面ÿ…...

属于超级学习者的时代!中国学者用三种策略找到放射组学预测模型的最佳算法
源自风暴统计网:一键统计分析与绘图的网站由于可以使用大量数据进行训练,还能整合基因图谱、影像、脑电图、生理数据等多种数据源,因此机器学习(ML)算法特别适合个体化医疗。今天分享一篇基于集成机器学习,…...

德希科技在线污泥浓度传感器
一、应用场景与产品定位 污泥浓度是污水处理生化系统稳定运行的关键控制指标,研发人员针对市政污水、工业废水处理厂曝气池、二沉池、氧化沟等场景的监测需求,推出散射光法在线污泥浓度传感器。设备以高稳定性、强抗干扰、长寿命的特性,适配…...

AI Agent不是你以为的那样
系列:《AI Agent 从原理到实战 —— 解密 Claude Code 背后的工程智慧》 第1篇引言 你大概有过这样的体验:打开 ChatGPT,说一句"帮我写封邮件,拒绝周五的会议邀请,语气委婉一点",几秒钟后一封措辞…...
)
告别GitHub下载卡顿:手把手教你配置Electron国内镜像(npmrc文件详解)
告别Electron下载困境:深度解析.npmrc配置与国内镜像实战指南 每次执行npm install electron时,看着进度条卡在node install.js阶段一动不动,或是突然蹦出RequestError: connect ETIMEDOUT的红色报错——这种体验对于国内开发者来说再熟悉不过…...

忍者像素绘卷代码实例:Python调用Z-Image-Turbo-rinaiqiao模型避坑指南
忍者像素绘卷代码实例:Python调用Z-Image-Turbo-rinaiqiao模型避坑指南 1. 环境准备与快速部署 在开始使用忍者像素绘卷之前,我们需要先搭建好Python环境并安装必要的依赖库。这个模型基于Z-Image-Turbo深度优化,特别适合生成16-Bit复古风格…...