7、关于LoFTR
7、关于LoFTR
LoFTR论文链接:LoFTR
LoFTR的提出,是将Transformer模型的注意力机制在特征匹配方向的应用,Transformer的提取特征的机制,在自身进行,本文提出可以的两张图像之间进行特征计算,非常适合进行特征匹配。
一、传统匹配模式的局限
- 首先找到一些关键点(图像梯度较高,角点检测等),然后计算特征相似度来匹配,这种方法很依赖检测到的特征点,一旦点找不到,那就不用说匹配了

- 对于位置不同的两个点,如果它们的背景特征相似(与位置无关了),也无法匹配,两者差别不大的,就无法区分了

二、LoFTR解决方案
- 不需要先得到特征点,第一个问题就得到了解决
- 采用end2end(给一个输入,得到结果)方法,使用非常方便

三、模型架构图
模型进行特征匹配主要分为四步:
- Local Feature CNN,就是一个blockbone,对两张图特征图进行卷积,分别得到原来特征图大小的1/8(用来进行粗粒度的匹配)和1/2(用来进行细粒度的匹配) 大小特征图。
- Coarse-Level Local Feature Transformer,是对两张1/8的特征图(FA,FB)进行多个串联的self-attention(自己的q和k向量做内积)和cross-attention(FA提供q,FB提供V做内积)来计算自己每个区域内之间的关系和两张图不同区域内的关系。
- Matching Module,到目前位置都是进行粗粒度匹配,经过了多层的Coarse-Level Local Feature Transformer,FA,FB已经了解了自身的关系,同时也知道了和对方之间的关系,要进行关系的匹配了,采用互近邻(mutual nearest neighbor (MNN))的方式匹配,简单来说,假设FA对某个点信息概率值大, 但是同时也要某个点对A的概率值也大,必须双向的,源码阈值设置为0.2,也就是互相的结果都大于0.2才能匹配成功,筛选得到符合阈值点传入下一层。
- Coarse-to-Fine Module,在经过粗粒度匹配之后,会得到一些候选点区域,这些候选点区域会传到细粒度,细粒度其实就是在匹配的小区域上再做一次Coarse-Level Local Feature Transformer,同样会互相了解对方的特征,但是这里不是采用MNN机制,假设FA的小区域中的某个点有FB对应小区域中的所有点匹配的概率值,才将这写概率值绘制成类似于热力图,再对整个图计算期望值,得到最终的匹配点坐标。

核心代码
class LoFTR(nn.Module):、# ... 省略初始化代码def forward(self, data):""" 前向传播函数:参数:data (dict): 包含图像和可选掩码的字典'image0': (torch.Tensor): (N, 1, H, W) 第一张图像'image1': (torch.Tensor): (N, 1, H, W) 第二张图像'mask0' (可选): (torch.Tensor): (N, H, W) 第一张图像的掩码,'0' 表示填充位置'mask1' (可选): (torch.Tensor): (N, H, W) 第二张图像的掩码"""# 更新数据字典,添加批次大小和图像尺寸data.update({'bs': data['image0'].size(0), # 批次大小'hw0_i': data['image0'].shape[2:], # 第一张图像的高度和宽度'hw1_i': data['image1'].shape[2:] # 第二张图像的高度和宽度})# 如果两张图像的尺寸相同,进行联合处理if data['hw0_i'] == data['hw1_i']:print("Concatenated Images Shape:", torch.cat([data['image0'], data['image1']], dim=0).shape) # ([2, 1, 480, 640])feats_c, feats_f = self.backbone(torch.cat([data['image0'], data['image1']], dim=0))print("Feature Coarse Shape:", feats_c.shape) # 1/8 ([2, 256, 60, 80])print("Feature Fine Shape:", feats_f.shape) # 1/2 ([2, 128, 240, 320])# 分离两张图像的特征(feat_c0, feat_c1), (feat_f0, feat_f1) = feats_c.split(data['bs']), feats_f.split(data['bs'])print("Feature Coarse Image 0 Shape:", feat_c0.shape) # ([1, 256, 60, 80])print("Feature Coarse Image 1 Shape:", feat_c1.shape) # ([1, 256, 60, 80])print("Feature Fine Image 0 Shape:", feat_f0.shape) # ([1, 128, 240, 320])print("Feature Fine Image 1 Shape:", feat_f1.shape) # ([1, 128, 240, 320])else:# 处理不同尺寸的图像(feat_c0, feat_f0), (feat_c1, feat_f1) = self.backbone(data['image0']), self.backbone(data['image1'])print("Feature Coarse Image 0 Shape:", feat_c0.shape)print("Feature Coarse Image 1 Shape:", feat_c1.shape)print("Feature Fine Image 0 Shape:", feat_f0.shape)print("Feature Fine Image 1 Shape:", feat_f1.shape)# 更新数据字典,添加特征图的尺寸data.update({'hw0_c': feat_c0.shape[2:], # 第一张图像粗特征的高度和宽度'hw1_c': feat_c1.shape[2:], # 第二张图像粗特征的高度和宽度'hw0_f': feat_f0.shape[2:], # 第一张图像细特征的高度和宽度'hw1_f': feat_f1.shape[2:] # 第二张图像细特征的高度和宽度})# 2. 粗级别局部变换模块# 添加位置编码信息feat_c0 = rearrange(self.pos_encoding(feat_c0), 'n c h w -> n (h w) c')print("Encoded Coarse Feature Image 0 Shape:", feat_c0.shape) # ([1, 4800, 256]) # 总共4800个点,每个点事256维向量feat_c1 = rearrange(self.pos_encoding(feat_c1), 'n c h w -> n (h w) c')print("Encoded Coarse Feature Image 1 Shape:", feat_c1.shape) # ([1, 4800, 256])mask_c0 = mask_c1 = None # 掩码在训练中有用if 'mask0' in data:mask_c0, mask_c1 = data['mask0'].flatten(-2), data['mask1'].flatten(-2)# 进行粗级别局部变换feat_c0, feat_c1 = self.loftr_coarse(feat_c0, feat_c1, mask_c0, mask_c1) print("Transformed Coarse Feature Image 0 Shape:", feat_c0.shape) # ([1, 4800, 256]) # 计算后输出结果不变print("Transformed Coarse Feature Image 1 Shape:", feat_c1.shape) # ([1, 4800, 256]) # 计算后输出结果不变# 3. 粗级别匹配self.coarse_matching(feat_c0, feat_c1, data, mask_c0=mask_c0, mask_c1=mask_c1) # 4. 细级别细化feat_f0_unfold, feat_f1_unfold = self.fine_preprocess(feat_f0, feat_f1, feat_c0, feat_c1, data)if feat_f0_unfold.size(0) != 0: # 至少有一个粗级别预测feat_f0_unfold, feat_f1_unfold = self.loftr_fine(feat_f0_unfold, feat_f1_unfold)# 5. 细级别匹配self.fine_matching(feat_f0_unfold, feat_f1_unfold, data)return x
Local Feature CNN
Local Feature CNN,就是一个blockbone,对两张图特征图进行卷积,分别得到原来特征图大小的1/8(用来进行粗粒度的匹配)和1/2(用来进行细粒度的匹配) 大小特征图。
# 来源 feats_c, feats_f = self.backbone(torch.cat([data['image0'], data['image1']], dim=0))
def build_backbone(config):if config['backbone_type'] == 'ResNetFPN':if config['resolution'] == (8, 2):return ResNetFPN_8_2(config['resnetfpn'])# ...
class ResNetFPN_8_2(nn.Module):"""ResNet+FPN, output resolution are 1/8 and 1/2.Each block has 2 layers."""# 使用ResNet+FPN获得特征图1/8 和 1/2# 关于FPN,FPN(Feature Pyramid Networks)是一种用于目标检测和分割任务的神经网络架构,# 特别适用于处理多尺度的图像特征。它通过建立特征金字塔来捕捉不同尺度的图像信息,增强了模型对不同尺度目标的检测能力。def __init__(self, config):# ... 具体代码太长不展示
Coarse-Level Local Transformer
Coarse-Level Local Feature Transformer,是对两张1/8的特征图(FA,FB)进行多个串联的self-attention(自己的q和k向量做内积)和cross-attention(FA提供q,FB提供V做内积)来计算自己每个区域内之间的关系和两张图不同区域内的关系。
# 来源核心代码中 feat_c0, feat_c1 = self.loftr_coarse(feat_c0, feat_c1, mask_c0, mask_c1)
class LocalFeatureTransformer(nn.Module):def forward(self, feat0, feat1, mask0=None, mask1=None):"""前向传播函数:参数:feat0 (torch.Tensor): 特征图 0,形状为 [N, L, C]feat1 (torch.Tensor): 特征图 1,形状为 [N, S, C]mask0 (torch.Tensor): 特征图 0 的掩码,形状为 [N, L](可选)mask1 (torch.Tensor): 特征图 1 的掩码,形状为 [N, S](可选)"""# 确保特征图的通道数与 transformer 的模型维度一致assert self.d_model == feat0.size(2), "the feature number of src and transformer must be equal"# 迭代处理每一层,根据名称决定操作,总共4个self-cross,两个额为一组for layer, name in zip(self.layers, self.layer_names): # ['self', 'cross', 'self', 'cross', 'self', 'cross', 'self', 'cross']if name == 'self':# 自注意力机制:feat0 本身计算 q 和 kfeat0 = layer(feat0, feat0, mask0, mask0)print("Self Attention Output feat0 Shape:", feat0.shape) # ([1, 4800, 256])# 自注意力机制:feat1 本身计算 q 和 kfeat1 = layer(feat1, feat1, mask1, mask1)print("Self Attention Output feat1 Shape:", feat1.shape) # ([1, 4800, 256])elif name == 'cross':# 交叉注意力机制:feat0 提供 q,feat1 提供 k 和 vfeat0 = layer(feat0, feat1, mask0, mask1)print("Cross Attention Output feat0 Shape:", feat0.shape) # ([1, 4800, 256])# 交叉注意力机制:feat1 提供 q,feat0 提供 k 和 vfeat1 = layer(feat1, feat0, mask1, mask0)print("Cross Attention Output feat1 Shape:", feat1.shape) # ([1, 4800, 256])else:raise KeyError("Unknown layer type")print("Final feat0 Shape:", feat0.shape) # ([1, 4800, 256]) 计算后向量维度是不变的print("Final feat1 Shape:", feat1.shape) # ([1, 4800, 256])return feat0, feat1
Matching Module
Matching Module,到目前位置都是进行粗粒度匹配,经过了多层的Coarse-Level Local Feature Transformer,FA,FB已经了解了自身的关系,同时也知道了和对方之间的关系,要进行关系的匹配了,采用互近邻(mutual nearest neighbor (MNN))的方式匹配,简单来说,假设FA对某个点信息概率值大, 但是同时也要某个点对A的概率值也大,必须双向的,源码阈值设置为0.2,也就是互相的结果都大于0.2才能匹配成功,筛选得到符合阈值点传入下一层。
# 来源核心代码中 self.coarse_matching(feat_c0, feat_c1, data, mask_c0=mask_c0, mask_c1=mask_c1)
class CoarseMatching(nn.Module):def forward(self, feat_c0, feat_c1, data, mask_c0=None, mask_c1=None):"""前向传播函数:参数:feat_c0 (torch.Tensor): 特征图 0,形状为 [N, L, C]feat_c1 (torch.Tensor): 特征图 1,形状为 [N, S, C]data (dict): 额外数据字典mask_c0 (torch.Tensor): 特征图 0 的掩码,形状为 [N, L](可选)mask_c1 (torch.Tensor): 特征图 1 的掩码,形状为 [N, S](可选)"""# 提取批次大小、特征图 0 的长度、特征图 1 的长度和特征图的通道数N, L, S, C = feat_c0.size(0), feat_c0.size(1), feat_c1.size(1), feat_c0.size(2)print(feat_c0.shape) # ([1, 4800, 256])# 对特征图进行归一化feat_c0, feat_c1 = map(lambda feat: feat / feat.shape[-1]**.5, [feat_c0, feat_c1])if self.match_type == 'dual_softmax':# 计算相似度矩阵sim_matrix = torch.einsum("nlc,nsc->nls", feat_c0, feat_c1) / self.temperatureprint("Similarity Matrix Shape:", sim_matrix.shape) # ([1, 4800, 4800]) ,feat_c0中的4800和feat_c1进行计算得到([1, 4800, 4800])if mask_c0 is not None:# 应用掩码,将不需要的位置填充为负无穷大sim_matrix.masked_fill_(~(mask_c0[..., None] * mask_c1[:, None]).bool(),-float('inf'))# 计算置信度矩阵conf_matrix = F.softmax(sim_matrix, 1) * F.softmax(sim_matrix, 2)print("Confidence Matrix Shape:", conf_matrix.shape) # ([1, 4800, 4800])# ... 省略部分没走的代码# 更新数据字典data.update({'conf_matrix': conf_matrix})# 从置信度矩阵中预测粗略匹配data.update(**self.get_coarse_match(conf_matrix, data))
再进行下一步细粒度匹配之前,需要将粗粒度匹配出来结果和1/2特征图大小,进行处理,找出所有待细粒度处理的各个区域
# 来源核心代码中 feat_f0_unfold, feat_f1_unfold = self.fine_preprocess(feat_f0, feat_f1, feat_c0, feat_c1, data)
class FinePreprocess(nn.Module):def forward(self, feat_f0, feat_f1, feat_c0, feat_c1, data):"""前向传播函数:参数:feat_f0 (torch.Tensor): 特征图 0,形状为 [N, C, H, W]feat_f1 (torch.Tensor): 特征图 1,形状为 [N, C, H, W]feat_c0 (torch.Tensor): 粗级特征图 0,形状为 [N, L, C]feat_c1 (torch.Tensor): 粗级特征图 1,形状为 [N, L, C]data (dict): 包含额外信息的数据字典更新:data (dict): 更新数据字典,包括:'W' (int): 窗口大小"""# 获取窗口大小和步幅W = self.Wstride = data['hw0_f'][0] // data['hw0_c'][0]# 更新数据字典data.update({'W': W})# 如果没有有效的批次 ID,返回空张量if data['b_ids'].shape[0] == 0:feat0 = torch.empty(0, self.W**2, self.d_model_f, device=feat_f0.device)feat1 = torch.empty(0, self.W**2, self.d_model_f, device=feat_f0.device)return feat0, feat1# 1. 展开所有局部窗口# 使用 unfold 函数提取特征图中的局部窗口feat_f0_unfold = F.unfold(feat_f0, kernel_size=(W, W), stride=stride, padding=W//2)feat_f0_unfold = rearrange(feat_f0_unfold, 'n (c ww) l -> n l ww c', ww=W**2)feat_f1_unfold = F.unfold(feat_f1, kernel_size=(W, W), stride=stride, padding=W//2)feat_f1_unfold = rearrange(feat_f1_unfold, 'n (c ww) l -> n l ww c', ww=W**2)# 2. 仅选择预测的匹配# 根据数据中的批次 ID 和点 ID 选择特定的匹配特征feat_f0_unfold = feat_f0_unfold[data['b_ids'], data['i_ids']] # [n, ww, cf]feat_f1_unfold = feat_f1_unfold[data['b_ids'], data['j_ids']] # [n, ww, cf]# 选项:使用粗级别的 Loftr 特征作为上下文信息:连接和线性变换if self.cat_c_feat:# 从粗级别特征中选择窗口,并进行线性变换feat_c_win = self.down_proj(torch.cat([feat_c0[data['b_ids'], data['i_ids']],feat_c1[data['b_ids'], data['j_ids']]], 0)) # [2n, c]# 合并特征图feat_cf_win = self.merge_feat(torch.cat([torch.cat([feat_f0_unfold, feat_f1_unfold], 0), # [2n, ww, cf]repeat(feat_c_win, 'n c -> n ww c', ww=W**2), # [2n, ww, cf]], -1))# 将合并后的特征图分为两部分feat_f0_unfold, feat_f1_unfold = torch.chunk(feat_cf_win, 2, dim=0)return feat_f0_unfold, feat_f1_unfold
Coarse-to-Fine Module
Coarse-to-Fine Module,在经过粗粒度匹配之后,会得到一些候选点区域,这些候选点区域会传到细粒度,细粒度其实就是在匹配的小区域上再做一次Coarse-Level Local Feature Transformer,同样会互相了解对方的特征,但是这里不是采用MNN机制,假设FA的小区域中的某个点有FB对应小区域中的所有点匹配的概率值,才将这写概率值绘制成类似于热力图,再对整个图计算期望值,得到最终的匹配点坐标。
# 来源核心代码中 self.fine_matching(feat_f0_unfold, feat_f1_unfold, data)
class FineMatching(nn.Module):def forward(self, feat_f0, feat_f1, data):"""前向传播函数:参数:feat_f0 (torch.Tensor): 特征图 0,形状为 [M, WW, C],其中 M 是匹配的数量,WW 是窗口大小的平方,C 是通道数feat_f1 (torch.Tensor): 特征图 1,形状为 [M, WW, C]data (dict): 包含额外信息的数据字典"""M, WW, C = feat_f0.shape # 提取特征图的形状信息W = int(math.sqrt(WW)) # 计算窗口的边长scale = data['hw0_i'][0] / data['hw0_f'][0] # 计算缩放因子self.M, self.W, self.WW, self.C, self.scale = M, W, WW, C, scale# 特殊情况处理:如果没有找到粗级别匹配if M == 0:assert not self.training, "在训练阶段,M 应始终大于0,请检查 coarse_matching.py"# logger.warning('在粗级别没有找到匹配。')data.update({'expec_f': torch.empty(0, 3, device=feat_f0.device), # 返回空的期望位置和标准差'mkpts0_f': data['mkpts0_c'], # 使用粗级别的关键点作为回退'mkpts1_f': data['mkpts1_c'],})return# 选择特征图中心的特征feat_f0_picked = feat_f0[:, WW//2, :]print(feat_f0_picked.shape) # ([1541, 128]) 全部待计算的特征区域个数# 计算特征之间的相似度矩阵sim_matrix = torch.einsum('mc,mrc->mr', feat_f0_picked, feat_f1)print(sim_matrix.shape) # ([1541, 128]) # 使用 softmax 函数计算热图softmax_temp = 1. / C**.5heatmap = torch.softmax(softmax_temp * sim_matrix, dim=1).view(-1, W, W)print(heatmap.shape) # ([1541, 5, 5]) # 1541 个 5x5的热力图矩阵# 从热图中计算坐标,计算期望值coords_normalized = dsnt.spatial_expectation2d(heatmap[None], True)[0] # 计算归一化坐标print(coords_normalized.shape) #([1541, 2]) # 1541 个(x,y)坐标,都是小数,表示占图大小比例grid_normalized = create_meshgrid(W, W, True, heatmap.device).reshape(1, -1, 2) # 创建网格print(grid_normalized.shape) #([1, 25, 2])# 计算标准差var = torch.sum(grid_normalized**2 * heatmap.view(-1, WW, 1), dim=1) - coords_normalized**2 # 计算方差std = torch.sum(torch.sqrt(torch.clamp(var, min=1e-10)), -1) # 计算标准差,使用 clamp 以保证数值稳定性# 更新数据字典以用于精细级别的监督data.update({'expec_f': torch.cat([coords_normalized, std.unsqueeze(1)], -1)})# 计算绝对的关键点坐标,按图长宽比例还原位置坐标self.get_fine_match(coords_normalized, data)
相关文章:
7、关于LoFTR
7、关于LoFTR LoFTR论文链接:LoFTR LoFTR的提出,是将Transformer模型的注意力机制在特征匹配方向的应用,Transformer的提取特征的机制,在自身进行,本文提出可以的两张图像之间进行特征计算,非常适合进行特…...

硬件工程师笔试面试知识器件篇——电感
目录 3、电感 3.1、基础 电感原理图 电感实物图 3.1.1、定义与单位 1)定义: 2) 单位: 3.1.2、物理原理 1)法拉第电磁感应定律: 2)楞次定律: 3.1.3、电感器的构造 3.1.4、类型 3.1.5、应用 3.1.6、特性 3.1.7、设计考虑 3.2、相关问题 3.…...

代码随想录八股训练营第三十六天| C++
前言 一、push_back()和emplace_back()的区别? 1.1.push_back(): 1.2.emplace_back(): 1.3.区别总结: 1.4.使用场景: 二、map dequeu list 的实现原理? 2.1.std::map: 2.2. std::deque: 2.3. std::list: 2.4. 区别总结: 总结 前言…...
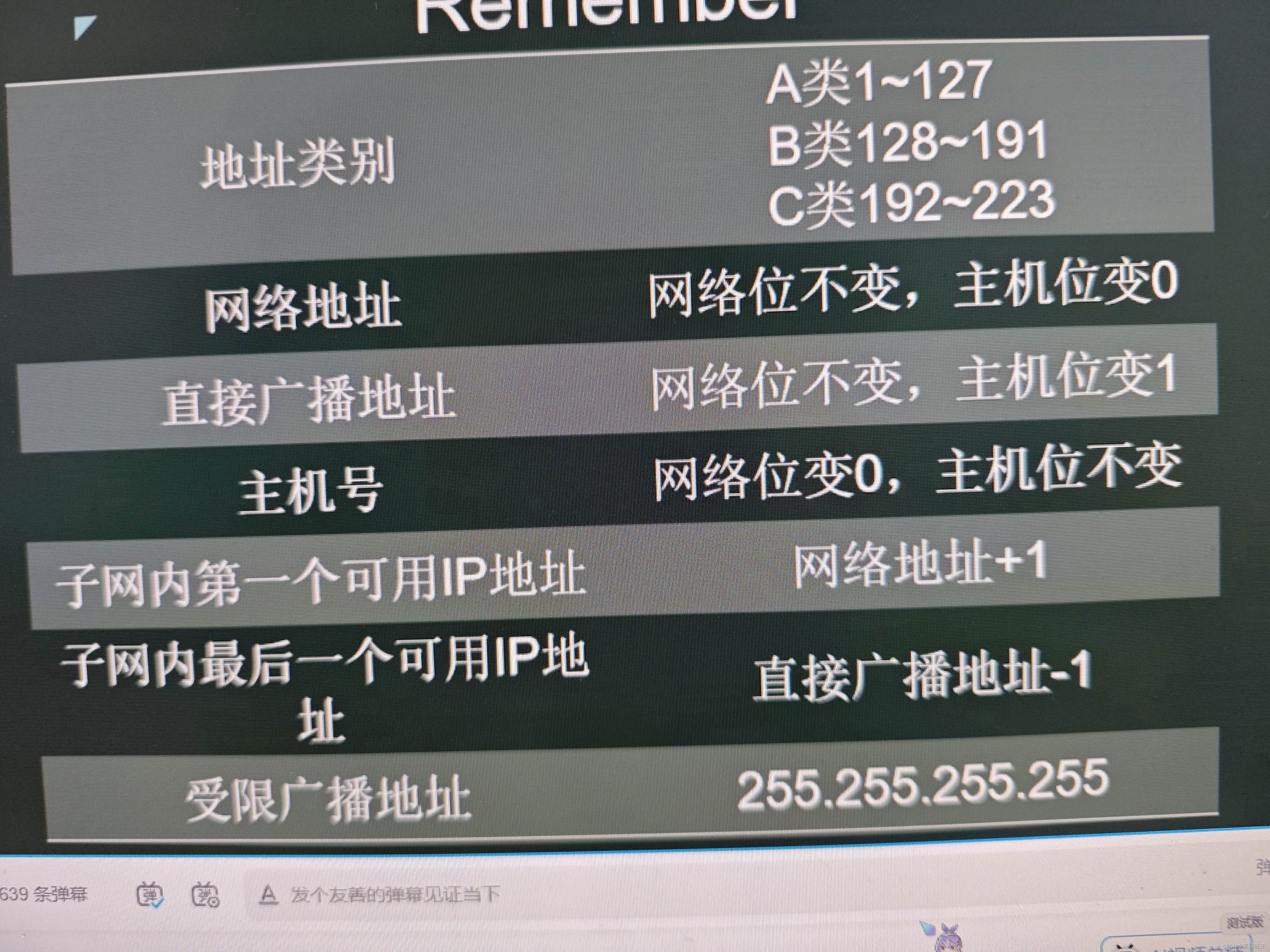
学习计算机网络
a类0~127,b类128~191,c类192~223 网络地址:看子网掩码,分网络位和主机位,后面是主机位,主机位全部为0,网络地址。 直接广播地址:看子网掩码,分网络位和主机位ÿ…...

Django发送邮件
【图书介绍】《Django 5企业级Web应用开发实战(视频教学版)》_django 5企业级web应用开发实战(视频教学版)-CSDN博客 Django 5框架Web应用开发_夏天又到了的博客-CSDN博客 本文学习怎么使用Django发送邮件。 尽管使用Python的smtplib模块发送电子邮件…...

T7:咖啡豆识别
T7:咖啡豆识别 **一、前期工作**1.设置GPU,导入库2.导入数据3.查看数据 **二、数据预处理**1.加载数据2.可视化数据3.配置数据集 **三、构建CNN网络模型**1、手动搭建2、直接调用官方模型 **四、编译模型****五、训练模型****六、模型评估****七、预测**八、暂时总结…...

【MATLAB】FIR滤波器的MATLAB实现
FIR滤波器的MATLAB实现 FIR滤波器的设计fir1函数fir2函数 与IIR滤波器相比,FIR滤波器既有其优势也有其局限性。FIR滤波器的主要优点包括: 精确的线性相位响应;永远保持稳定性;设计方法通常是线性的;在硬件实现中具有更…...

【RabbitMQ之一:windows环境下安装RabbitMQ】
目录 一、下载并安装Erlang1、下载Erlang2、安装Erlang3、配置环境变量4、验证erlang是否安装成功 二、下载并安装RabbitMQ1、下载RabbitMQ2、安装RabbitMQ3、配置环境变量4、验证RabbitMQ是否安装成功5、启动RabbitMQ服务(安装后服务默认自启动) 三、安…...

ISO26262和Aspice之间的关联
ASPICE 介绍: ASPICE(Automotive Software Process Improvement and Capability dEtermination)是汽车软件过程改进及能力评定的模型,它侧重于汽车软件的开发过程。ASPICE 定义了一系列的过程和活动,包括需求管理、软…...

对极约束及其性质 —— 公式详细推导
Title: 对极约束及其性质 —— 公式详细推导 文章目录 前言1. 对极约束 (Epipolar Constraint)2. 坐标转换 (Coordinate Transformations)3. 像素坐标 (Pixel Coordinates)4. 像素坐标转换 (Transformations of Pixel Coordinates)5. 本质矩阵 (Essential Matrix)6. 线坐标 (Co…...

【论文精读】SCINet-基于降采样和交互学习的时序卷积模型
《SCINet: Time Series Modeling and Forecasting with Sample Convolution and Interaction》的作者团队来自香港中文大学,发表在NeurIPS 2022会议上。 动机 该论文的出发点是观察到时间序列数据具有独特的属性:即使在将时间序列下采样成两个子序列后,时间关系(例如数据…...
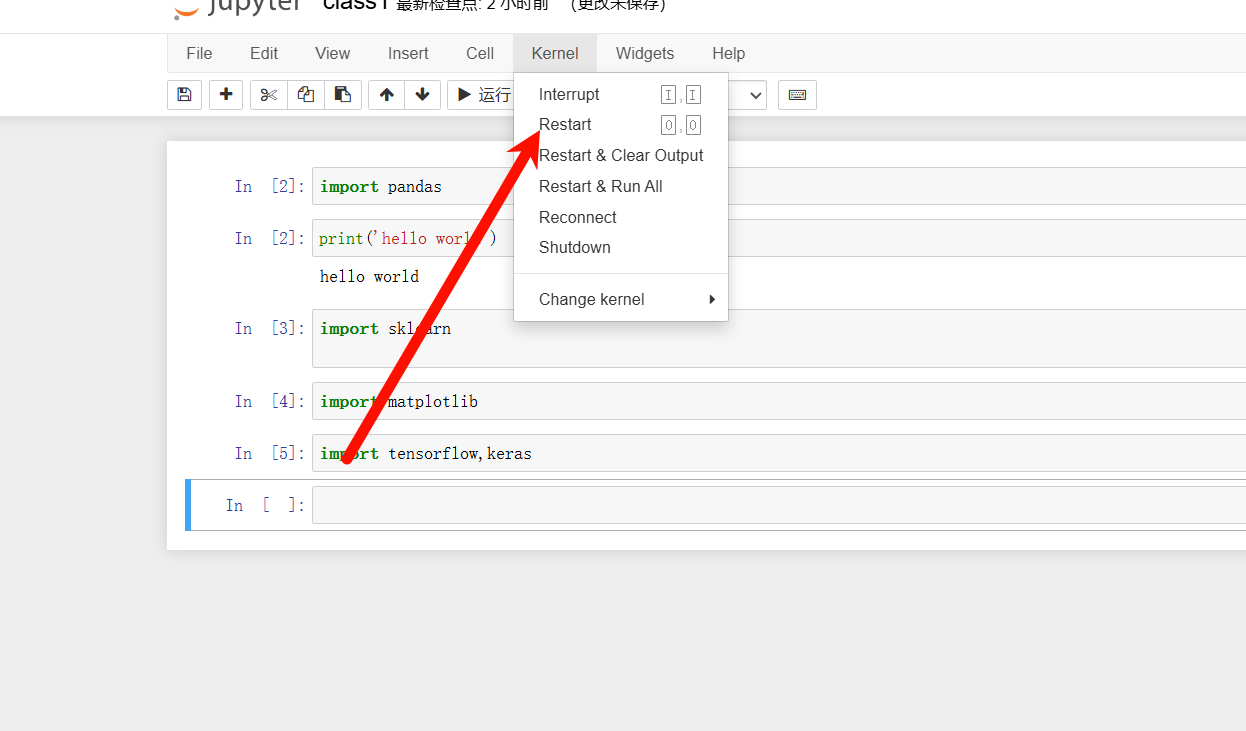
深度学习与大模型第1课环境搭建
文章目录 深度学习与大模型第1课环境搭建1. 安装 Anaconda2. 修改环境变量2.1 修改 .condarc 文件2.2 使用 Anaconda Prompt 修改环境变量 3. 新建 .ipynb 文件 机器学习基础编程:常见问题: 深度学习与大模型第1课 环境搭建 1. 安装 Anaconda 首先&am…...

JDK新特性
LTS Record jdk16 不是方法 是一个定 # Sealed Class/Interface jdk17 限制只能由某些类继承 CompletableFuture jkd8 PatternMatching of instanceOf jdk16 switch expressions jdk14 Stream.collect() Collector Collector API Collector.groupBy Collector实战 1. …...

数据处理与数据填充在Pandas中的应用
在数据分析和机器学习项目中,数据处理是至关重要的一步。Pandas作为Python中用于数据分析和操作的一个强大库,提供了丰富的功能来处理和清洗数据。本文将深入探讨Pandas在数据处理,特别是数据填充方面的应用。 在实际的数据集中,…...
)
【百日算法计划】:每日一题,见证成长(010)
题目 合并两个排序的链表 输入两个递增排序的链表,合并这两个链表并使新链表中的节点仍然是递增排序的 示例1: 输入:1->2->4, 1->3->4 输出:1->1->2->3->4->4 思路 引入一个带虚拟头结点和tail指针的…...

【WPF】WPF学习之【二】布局学习
WPF布局学习 常用布局Grid网格布局StackPanel 布局CanvasDockPanel布局WrapPanel布局 常用布局 1、StackPanel: 学习如何使用StackPanel进行垂直和水平布局。 2、Grid: 掌握Grid的网格布局技术。 3、Canvas: 了解Canvas的绝对定位布局。 4、DockPanel: 学习DockPanel的停靠…...

KEIL中编译51程序 算法计算异常的疑问
KEIL开发 51 单片机程序 算法处理过程中遇到的问题 ...... by 矜辰所致前言 因为产品的更新换代, 把所有温湿度传感器都换成 SHT40 ,替换以前的 SHT21。在 STM32 系列产品上的替换都正常,但是在一块 51 内核的无线产品上面,数据…...

pikachu文件包含漏洞靶场
本地文件包含 1、先随意进行提交 可以得出是GET传参 可以在filename参数进行文件包含 2、准备一个2.jpg文件 内容为<?php phpinfo();?> 3、上传2.jpg文件 4、访问文件保存的路径uploads/2.jpg 5、将我们上传的文件包含进来 使用../返回上级目录 来进行包含木马文件 …...

基于DPU与SmartNIC的K8s Service解决方案
1. 方案背景 1.1. Kubernetes Service介绍 Kubernetes Service是Kubernetes中的一个核心概念,它定义了一种抽象,用于表示一组提供相同功能的Pods(容器组)的逻辑集合,并提供了一种方式让这些Pods能够被系统内的其他组…...

SLM561A系列 60V 10mA到50mA线性恒流LED驱动芯片 为智能家居照明注入新活力
SLM561A系列选型参考: SLM561A10ae-7G SOD123 SLM561A15ae-7G SOD123 SLM561A20ae-7G SOD123 SLM561A25ae-7G SOD123 SLM561A30ae-7G SOD123 SLM561A35ae-7G SOD123 SLM561A40ae-7G SOD123 SLM561A45ae-7G SOD123 SLM561A50ae-7G SOD123 …...

ComfyUI-Manager终极指南:3个核心功能彻底解决AI工作流管理难题
ComfyUI-Manager终极指南:3个核心功能彻底解决AI工作流管理难题 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable vari…...

ARMv8 HFGITR_EL2寄存器解析与虚拟化指令陷阱控制
1. AArch64 HFGITR_EL2寄存器架构解析HFGITR_EL2(Hypervisor Fine-Grained Instruction Trap Register)是ARMv8架构中专门用于指令级陷阱控制的系统寄存器,属于虚拟化扩展的重要组成部分。这个64位寄存器通过位映射机制实现对特定AArch64指令…...

自制极低频电流探头:负电阻补偿原理与低频方波测量实践
1. 项目概述:为极低频电流测量而生在电子测试领域,电流探头是个再常见不过的工具,无论是排查开关电源的纹波,还是分析电机驱动的波形,都离不开它。但如果你尝试用市面上常见的电流探头去观察一个频率低至几赫兹&#x…...

1901-2022年中国气温变化分析实战:用这份1km栅格数据我们能发现什么?
1901-2022年中国气温变化分析实战:如何从1km栅格数据中挖掘气候演变规律当一份覆盖122年、分辨率精确到1公里的气温栅格数据摆在面前时,我们看到的不仅是数字矩阵,更是一部写在经纬度坐标里的气候变迁史诗。这份由逐月数据聚合生成的逐年气温…...

Unity动态自然系统:Forest Environment-Dynamic Nature深度解析
1. 这不是“贴图堆砌”,而是自然系统级建模:Forest Environment-Dynamic Nature 的真实定位你有没有试过在Unity里拖进几棵树、铺点草、加个天空盒,然后发现场景像一张静止的风景明信片——风不动、叶不摇、雨不落、雾不散?我做过…...

AI圈内火热的Agent、MCP、Skill、CLI是啥?用装修房子讲透,看完秒懂
本文用装修房子的比喻,详细解释了AI领域的四个核心概念:Agent如同会自主规划任务的私人助理;MCP是AI与外部工具数据的统一接口,类似USB-C;Skill是指导AI按标准操作执行的手册;CLI则是不依赖图形界面的命令行…...

HiveWE终极指南:快速掌握魔兽争霸III现代化地图编辑器
HiveWE终极指南:快速掌握魔兽争霸III现代化地图编辑器 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 还在为传统魔兽争霸III地图编辑器缓慢的加载速度和复杂的操作界面而烦恼吗?Hiv…...

对比按量计费与Token Plan套餐的实际成本差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比按量计费与Token Plan套餐的实际成本差异 在构建和运营基于大模型的应用时,成本控制是一个核心的工程考量。Taotok…...

Win11Debloat:Windows系统精简与隐私保护的专业解决方案
Win11Debloat:Windows系统精简与隐私保护的专业解决方案 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter and …...

自动加字幕软件推荐:口播视频如何批量加字幕过
口播视频加字幕,为什么越做越累?一位知识类博主连续两周日更3条口播视频,每条12–18分钟,需手动校对字幕、拆分金句切片、补气口停顿、匹配背景音乐——最后一条视频发布时,字幕错漏率达17%,平台审核未过。…...