【LVI-SAM】激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节
激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节
- 1. 特征提取实现过程总结
- 1.0 特征提取过程小结
- 1.1 类 `FeatureExtraction` 的整体结构与作用
- 1.2 详细特征提取的过程
- 1. 平滑度计算(`calculateSmoothness()`)
- 2. 标记遮挡点(`markOccludedPoints()`)
- 3. 特征提取(`extractFeatures()`)
- 4. 发布特征点云(`publishFeatureCloud()`)
- 2.0 特征提取数学推倒过程
- 3.0 FeatureExtraction Code
1. 特征提取实现过程总结
这段代码实现了基于LiDAR(激光雷达)点云数据的特征提取,用于SLAM(Simultaneous Localization and Mapping)系统中的前端处理。特征提取的目的是从点云中识别出角点和平面点(面点),为后续的位姿估计和地图构建提供关键特征点。

1.0 特征提取过程小结
这段代码的主要目的是从LiDAR点云中提取出角点(边缘)和面点(平面),以便用于SLAM系统中。整个流程涉及:
- 平滑度计算:通过计算每个点的平滑度来区分平滑点和突变点。
- 遮挡点标记:通过深度差和像素间距来标记被遮挡的点和平行光束点。
- 特征提取:根据曲率值提取角点和面点,分别用于位姿估计和地图构建。
- 降采样和发布:通过降采样减少数据冗余,最终发布处理后的特征点云。
1.1 类 FeatureExtraction 的整体结构与作用
-
类成员:
- 该类通过 ROS 订阅与发布机制接收来自雷达的点云信息,并在处理后发布提取的特征。
- 重要的类成员包括:
- 订阅器
subLaserCloudInfo,用于接收点云数据。 - 发布器
pubLaserCloudInfo、pubCornerPoints和pubSurfacePoints,分别用于发布处理后的点云信息、角点特征和面点特征。 - 点云指针
extractedCloud、cornerCloud和surfaceCloud,用于保存原始提取点云和特征点云。 cloudCurvature、cloudNeighborPicked和cloudLabel,这些数组用于存储每个点的曲率、是否被选中、点的分类标签。
- 订阅器
-
构造函数
FeatureExtraction:- 初始化了订阅与发布机制。
- 调用了
initializationValue()函数来初始化一些数据结构和参数。
-
回调函数
laserCloudInfoHandler:- 处理订阅到的点云信息,调用以下核心功能:
calculateSmoothness()(计算每个点的平滑度)、markOccludedPoints()(标记被遮挡的点)和extractFeatures()(特征提取),最后发布特征点云。
- 处理订阅到的点云信息,调用以下核心功能:
1.2 详细特征提取的过程
void laserCloudInfoHandler(const lio_sam::cloud_infoConstPtr& msgIn){cloudInfo = *msgIn; // new cloud infocloudHeader = msgIn->header; // new cloud headerpcl::fromROSMsg(msgIn->cloud_deskewed, *extractedCloud); // new cloud for extractioncalculateSmoothness();markOccludedPoints();extractFeatures();publishFeatureCloud();}
1. 平滑度计算(calculateSmoothness())
这个函数计算每个点的平滑度,平滑度的定义是基于该点与其前后(5点)若干点之间的距离变化。具体步骤为:
for循环:- 遍历从第5个点到倒数第5个点,以避免处理边界的点。
- 计算该点前后5个点的距离差的平方和,并将该结果作为该点的曲率(即平滑度值
cloudCurvature[i])。 - 初始化该点的
cloudNeighborPicked为 0(表示该点还没有被处理过)和cloudLabel为 0(标签,初始为未分类)。 - 将平滑度值和点的索引存储到
cloudSmoothness中,以便后续进行排序。
2. 标记遮挡点(markOccludedPoints())
该函数标记被遮挡的点以及光束平行的点,以避免它们影响特征提取。主要逻辑如下:
-
遮挡点:
- 遍历每个点,比较该点与相邻点的深度差(即距离差)。
- 如果相邻两个点的列索引差小于 10(表示在深度图像中的像素间距较小),且深度差大于 0.3,则认为是遮挡点并标记为已处理(
cloudNeighborPicked[i] = 1),即这些点将不会被选为特征点。
-
平行光束:
- 如果前后点与当前点的距离差大于一定比例(
0.02 * cloudInfo.pointRange[i]),则认为它们是平行光束,这种情况下这些点也会被标记为已处理。
- 如果前后点与当前点的距离差大于一定比例(
3. 特征提取(extractFeatures())
这个函数的主要任务是提取角点和面点,并根据曲率值将点云进行分类。主要逻辑如下:
- for 循环1-2:遍历激光雷达的扫描线
N_SCAN(通常是垂直方向上的扫描线数量),每条扫描线都被分为6个区域,逐个区域进行处理。-
for 循环3-4:处理每个区域的点,将该区域按平滑度(即曲率)从大到小排序,然后分成两个部分进行处理:
- 角点提取:
- 从平滑度最高的点开始,如果该点没有被遮挡且曲率值大于阈值
edgeThreshold,则将其标记为角点,并加入角点点云(cornerCloud)。 - 为了避免噪声点的影响,最多提取20个角点,并标记相邻的点为已处理,防止相邻的点被重复选取。
- 从平滑度最高的点开始,如果该点没有被遮挡且曲率值大于阈值
- 面点提取:
- 对于平滑度较低的点,如果曲率小于阈值
surfThreshold,则将其标记为面点,加入面点点云(surfaceCloud)。 - 同样,通过标记相邻点来避免重复选择。
- 对于平滑度较低的点,如果曲率小于阈值
- 角点提取:
-
for 循环5:对于那些没有被标记为角点且曲率较小的点,将它们视为面点。
-
- 降采样:通过
pcl::VoxelGrid对面点进行降采样,减少点云的冗余数据,提升后续处理效率。
# LOAM feature thresholdedgeThreshold: 1.0surfThreshold: 0.1edgeFeatureMinValidNum: 10surfFeatureMinValidNum: 100
4. 发布特征点云(publishFeatureCloud())
在提取完角点和面点之后,该函数将处理后的点云数据发布出去,用于后续的地图优化和位姿估计。
2.0 特征提取数学推倒过程
数学推倒
3.0 FeatureExtraction Code
#include "utility.h"
#include "lio_sam/cloud_info.h"struct smoothness_t{ float value;size_t ind;
};struct by_value{ bool operator()(smoothness_t const &left, smoothness_t const &right) { return left.value < right.value;}
};class FeatureExtraction : public ParamServer
{public:ros::Subscriber subLaserCloudInfo;ros::Publisher pubLaserCloudInfo;ros::Publisher pubCornerPoints;ros::Publisher pubSurfacePoints;pcl::PointCloud<PointType>::Ptr extractedCloud;pcl::PointCloud<PointType>::Ptr cornerCloud;pcl::PointCloud<PointType>::Ptr surfaceCloud;pcl::VoxelGrid<PointType> downSizeFilter;lio_sam::cloud_info cloudInfo;std_msgs::Header cloudHeader;std::vector<smoothness_t> cloudSmoothness;float *cloudCurvature;int *cloudNeighborPicked;int *cloudLabel;FeatureExtraction(){subLaserCloudInfo = nh.subscribe<lio_sam::cloud_info>("lio_sam/deskew/cloud_info", 1, &FeatureExtraction::laserCloudInfoHandler, this, ros::TransportHints().tcpNoDelay());pubLaserCloudInfo = nh.advertise<lio_sam::cloud_info> ("lio_sam/feature/cloud_info", 1);pubCornerPoints = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/feature/cloud_corner", 1);pubSurfacePoints = nh.advertise<sensor_msgs::PointCloud2>("lio_sam/feature/cloud_surface", 1);initializationValue();}void initializationValue(){cloudSmoothness.resize(N_SCAN*Horizon_SCAN);downSizeFilter.setLeafSize(odometrySurfLeafSize, odometrySurfLeafSize, odometrySurfLeafSize);extractedCloud.reset(new pcl::PointCloud<PointType>());cornerCloud.reset(new pcl::PointCloud<PointType>());surfaceCloud.reset(new pcl::PointCloud<PointType>());cloudCurvature = new float[N_SCAN*Horizon_SCAN];cloudNeighborPicked = new int[N_SCAN*Horizon_SCAN];cloudLabel = new int[N_SCAN*Horizon_SCAN];}/*** @brief 计算平滑度** 遍历提取的点云数据,计算每个点的平滑度,并保存到对应数组中。** @note 对于点云中的每个点,计算其与前五个和后五个点的距离差的平方和作为平滑度。* 同时初始化相邻点被选中的状态为0,以及点的标签为0。* 将平滑度值以及对应的索引保存到cloudSmoothness数组中,以便后续排序。*/void calculateSmoothness(){int cloudSize = extractedCloud->points.size();for (int i = 5; i < cloudSize - 5; i++){float diffRange = cloudInfo.pointRange[i-5] + cloudInfo.pointRange[i-4]+ cloudInfo.pointRange[i-3] + cloudInfo.pointRange[i-2]+ cloudInfo.pointRange[i-1] - cloudInfo.pointRange[i] * 10+ cloudInfo.pointRange[i+1] + cloudInfo.pointRange[i+2]+ cloudInfo.pointRange[i+3] + cloudInfo.pointRange[i+4]+ cloudInfo.pointRange[i+5]; cloudCurvature[i] = diffRange*diffRange;//diffX * diffX + diffY * diffY + diffZ * diffZ;cloudNeighborPicked[i] = 0;cloudLabel[i] = 0;// cloudSmoothness for sortingcloudSmoothness[i].value = cloudCurvature[i];cloudSmoothness[i].ind = i;}}/*** @brief 标记被遮挡的点** 根据给定的点云信息,标记被遮挡的点和平行光束点。*/void markOccludedPoints(){int cloudSize = extractedCloud->points.size();// mark occluded points and parallel beam pointsfor (int i = 5; i < cloudSize - 6; ++i){// occluded pointsfloat depth1 = cloudInfo.pointRange[i];float depth2 = cloudInfo.pointRange[i+1];int columnDiff = std::abs(int(cloudInfo.pointColInd[i+1] - cloudInfo.pointColInd[i]));if (columnDiff < 10){// 10 pixel diff in range imageif (depth1 - depth2 > 0.3){cloudNeighborPicked[i - 5] = 1;cloudNeighborPicked[i - 4] = 1;cloudNeighborPicked[i - 3] = 1;cloudNeighborPicked[i - 2] = 1;cloudNeighborPicked[i - 1] = 1;cloudNeighborPicked[i] = 1;}else if (depth2 - depth1 > 0.3){cloudNeighborPicked[i + 1] = 1;cloudNeighborPicked[i + 2] = 1;cloudNeighborPicked[i + 3] = 1;cloudNeighborPicked[i + 4] = 1;cloudNeighborPicked[i + 5] = 1;cloudNeighborPicked[i + 6] = 1;}}// parallel beamfloat diff1 = std::abs(float(cloudInfo.pointRange[i-1] - cloudInfo.pointRange[i]));float diff2 = std::abs(float(cloudInfo.pointRange[i+1] - cloudInfo.pointRange[i]));if (diff1 > 0.02 * cloudInfo.pointRange[i] && diff2 > 0.02 * cloudInfo.pointRange[i])cloudNeighborPicked[i] = 1;}}void extractFeatures(){cornerCloud->clear();surfaceCloud->clear();pcl::PointCloud<PointType>::Ptr surfaceCloudScan(new pcl::PointCloud<PointType>());pcl::PointCloud<PointType>::Ptr surfaceCloudScanDS(new pcl::PointCloud<PointType>());for (int i = 0; i < N_SCAN; i++){surfaceCloudScan->clear();for (int j = 0; j < 6; j++){int sp = (cloudInfo.startRingIndex[i] * (6 - j) + cloudInfo.endRingIndex[i] * j) / 6;int ep = (cloudInfo.startRingIndex[i] * (5 - j) + cloudInfo.endRingIndex[i] * (j + 1)) / 6 - 1;if (sp >= ep)continue;std::sort(cloudSmoothness.begin()+sp, cloudSmoothness.begin()+ep, by_value());int largestPickedNum = 0;for (int k = ep; k >= sp; k--){int ind = cloudSmoothness[k].ind;if (cloudNeighborPicked[ind] == 0 && cloudCurvature[ind] > edgeThreshold){largestPickedNum++;if (largestPickedNum <= 20){cloudLabel[ind] = 1;cornerCloud->push_back(extractedCloud->points[ind]);} else {break;}cloudNeighborPicked[ind] = 1;for (int l = 1; l <= 5; l++){int columnDiff = std::abs(int(cloudInfo.pointColInd[ind + l] - cloudInfo.pointColInd[ind + l - 1]));if (columnDiff > 10)break;cloudNeighborPicked[ind + l] = 1;}for (int l = -1; l >= -5; l--){int columnDiff = std::abs(int(cloudInfo.pointColInd[ind + l] - cloudInfo.pointColInd[ind + l + 1]));if (columnDiff > 10)break;cloudNeighborPicked[ind + l] = 1;}}}for (int k = sp; k <= ep; k++){int ind = cloudSmoothness[k].ind;if (cloudNeighborPicked[ind] == 0 && cloudCurvature[ind] < surfThreshold){cloudLabel[ind] = -1;cloudNeighborPicked[ind] = 1;for (int l = 1; l <= 5; l++) {int columnDiff = std::abs(int(cloudInfo.pointColInd[ind + l] - cloudInfo.pointColInd[ind + l - 1]));if (columnDiff > 10)break;cloudNeighborPicked[ind + l] = 1;}for (int l = -1; l >= -5; l--) {int columnDiff = std::abs(int(cloudInfo.pointColInd[ind + l] - cloudInfo.pointColInd[ind + l + 1]));if (columnDiff > 10)break;cloudNeighborPicked[ind + l] = 1;}}}for (int k = sp; k <= ep; k++){if (cloudLabel[k] <= 0){surfaceCloudScan->push_back(extractedCloud->points[k]);}}}surfaceCloudScanDS->clear();downSizeFilter.setInputCloud(surfaceCloudScan);downSizeFilter.filter(*surfaceCloudScanDS);*surfaceCloud += *surfaceCloudScanDS;}}void freeCloudInfoMemory(){cloudInfo.startRingIndex.clear();cloudInfo.endRingIndex.clear();cloudInfo.pointColInd.clear();cloudInfo.pointRange.clear();}void publishFeatureCloud(){// free cloud info memoryfreeCloudInfoMemory();// save newly extracted featurescloudInfo.cloud_corner = publishCloud(pubCornerPoints, cornerCloud, cloudHeader.stamp, lidarFrame);cloudInfo.cloud_surface = publishCloud(pubSurfacePoints, surfaceCloud, cloudHeader.stamp, lidarFrame);// publish to mapOptimizationpubLaserCloudInfo.publish(cloudInfo);}
};int main(int argc, char** argv)
{ros::init(argc, argv, "lio_sam");FeatureExtraction FE;ROS_INFO("\033[1;32m----> Feature Extraction Started.\033[0m");ros::spin();return 0;
}
相关文章:
【LVI-SAM】激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节
激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节 1. 特征提取实现过程总结1.0 特征提取过程小结1.1 类 FeatureExtraction 的整体结构与作用1.2 详细特征提取的过程1. 平滑度计算(calculateSmoothness())2. 标记遮挡点(markOcc…...

[数据集][目标检测]血细胞检测数据集VOC+YOLO格式2757张4类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):2757 标注数量(xml文件个数):2757 标注数量(txt文件个数):2757 标注…...

opencart journal 3 在价格前添加文本prefix
要修改的文件: /catalog/view/theme/journal3/template/product.twig 行274: <div class="product-price">{{ price }}</div>{% else %}<div class="product-price-new">{{ special }}</div><div class="product-pric…...

c++ string类的模拟实现的注意事项
一.构造函数 第一种形式,使用字符指针赋值 为了防止修改,我们传入了常量字符串。但是这里的初始化列表出错了,因为_str是一个变量,将常量给到一个变量涉及到权限的放大,是错误的。那该怎么写呢?对_str的赋…...

Unity3D中控制3D场景中游戏对象显示层级的详解
前言 在Unity3D开发中,控制游戏对象的显示层级(也称为渲染顺序或渲染层级)是一个常见的需求,特别是在处理复杂的3D场景时,如角色、道具、UI元素等的可见性和渲染顺序的管理变得尤为重要。Unity通过几种不同的机制来实…...

代码执行漏洞-Log4j2漏洞 vulhub CVE-2021-44228
步骤一:执行以下命令启动靶场环境并在浏览器访问!!! 查看端口 浏览器访问 可以发现 /solr/admin/cores?action 这⾥有个参数可以传,可以按照上⾯的原理 先构造⼀个请求传过去存在JNDI注⼊那么ldap服务端会执⾏我们传上去的payload JDNI项⽬地址 https://github.com…...

uniapp / uniapp x UI 组件库推荐大全
在 uniapp 开发中,我们大多数都会使用到第三方UI 组件库,提起 uniapp 的UI组件库,我们最常使用的应该就是uview了吧,但是随着日益增长的需求,uview 在某些情况下已经不在满足于我们的一些开发需求,尽管它目…...

花8000元去培训机构学习网络安全值得吗,学成后就业前景如何?
我就是从培训机构学的网络安全,线下五六个月,当时学费不到一万,目前已成功入行。所以,只要你下决心要入这一行,过程中能好好学,那这8000就花得值~ 因为只要学得好,工作两个多月就能赚回学费&am…...

PhpStorm 下调试功能配置
调试是开发过程中的关键环节,能够极大地减少应用程序中的错误并提高代码质量。PhpStorm 作为一款功能强大的 IDE,提供了丰富的调试功能,结合 Xdebug,可以让开发者更轻松地进行 PHP 应用程序的调试。本指南将详细介绍如何在 PhpSto…...
和MVVM(Model-View-ViewModel))
MVC(Model-View-Controller)和MVVM(Model-View-ViewModel)
1、MVC MVC(Model-View-Controller) 是一种常用的架构模式,用于分离应用程序的逻辑、数据和展示。它通过三个核心组件(模型、视图和控制器)将应用程序的业务逻辑与用户界面隔离,促进代码的可维护性、可扩展…...
【H2O2|全栈】关于HTML(4)HTML基础(三)
HTML相关知识 目录 HTML相关知识 前言 准备工作 标签的具体分类(三) 本文中的标签在什么位置中使用? 列表 编辑编辑 有序列表 无序列表 自定义列表 表格 拓展案例 预告和回顾 后话 前言 本系列博客将分享HTML相关知识点…...

关于找不到插件 ‘org.springframework.boot:spring-boot-maven-plugin:‘的解决方案
找到项目结构后,点击库,全选所有后点击应用即可...

深入RabbitMQ世界:探索3种队列、4种交换机、7大工作模式及常见概念
文章目录 文章导图RabbitMQ架构及相关概念四大核心概念名词解读 七大工作模式及四大交换机类型0、前置了解-默认交换机DirectExchange1、简单模式(Simple Queue)-默认DirectExchange2、 工作队列模式(Work Queues)-默认DirectExchange3、发布/订阅模式(Publish/Subscribe)-Fano…...
将目标检测模型导出到C++|RT-DETR、YOLO-NAS、YOLOv10、YOLOv9、YOLOv8
点击下方卡片,关注“小白玩转Python”公众号 最近,出现了更新的YOLO模型,还有RT-DETR模型,这是一个声称能击败YOLO模型的变换器模型,我想将这些模型导出并进行比较,并将它们添加到我的库中。在这篇文章中&a…...

【Windows】解决新版 Edge 浏览器开机自启问题(简单有效)
文章目录 1.前言2.查找资料3.查找方法4.解决办法1.点击浏览器的三个...,然后点击设置2.选择【开始、主页和新建标签页】选项卡,然后关闭【Windows设备启动时】 结语 参考文章: 解决新版 Edge 浏览器开机自启问题(简单有效…...
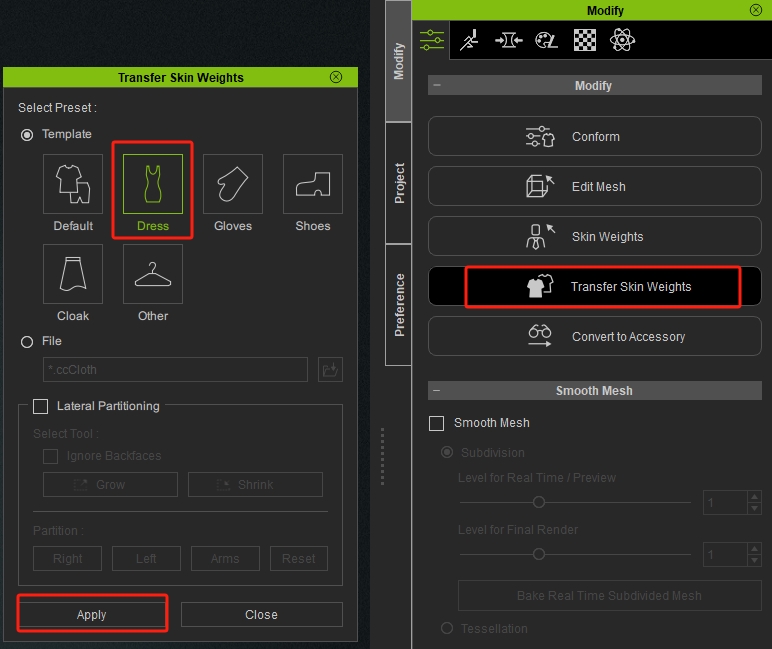
如何给3D人物换衣服CC4
1.导入人物 2.设置人物Apose 3.导入衣服 create -> accessory 选择fbx文件 设置衣服的大小和位置。 4.绑定衣服 设置衣服的权重 添加动作就可以看效果了。...

如何对列表、字符串进行分组
如何对列表、字符串进行分组 1、效果 2、代码 使用python自带库collections中的Counter函数即可实现 代码如下: # -*- coding: utf-8 -*-""" @contact: @file: test.py @time: 2024/9/8 11:18 @author: LDC """ from collections import Co…...

【GEE代码实例教程详解:NDVI时间序列趋势分析】
GEE(Google Earth Engine)是一个强大的云计算平台,用于处理和分析大规模地球科学数据集。以下是一个关于如何使用GEE进行NDVI(归一化植被指数)时间序列趋势分析的详细教程。 一、引言 NDVI时间序列趋势分析是一种统计…...

51单片机-DS1302(RTC实时时钟芯片)
数据手册在主页资源免费贡献 开发板芯片数据手册 https://www.alipan.com/s/nnkdHhMGjrz 提取码: 95ik 点击链接保存,...

FreeRTOS学习笔记—②RTOS的认识及任务管理篇
由于正在学习韦东山老师的RTOS课程,结合了网上的一些资料,整理记录了下自己的感悟,用于以后自己的回顾。如有不对的地方请各位大佬纠正。 文章目录 一、RTOS的优势二、RTOS的核心功能2.1 任务管理2.1.1 任务的创建2.1.2 任务的删除*2.1.3 任…...

Agent开发面试通关攻略:吃透稳拿offer
阅读前置:2026年当下最卷也最缺人的AI岗位,一定是AI Agent开发。最近刷遍CSDN、牛客、力扣最新面经,发现一个非常明显的招聘趋势:普通大模型微调岗位饱和内卷,而AI Agent开发岗位人才严重缺口,薪资更高、竞…...

Onekey终极指南:如何5分钟快速获取Steam游戏清单的免费神器
Onekey终极指南:如何5分钟快速获取Steam游戏清单的免费神器 【免费下载链接】Onekey Onekey Steam Depot Manifest Downloader 项目地址: https://gitcode.com/gh_mirrors/one/Onekey 还在为复杂的Steam游戏清单下载而头疼吗?想要备份游戏资源却不…...

【DeepSeek开源协议识别权威指南】:20年合规专家亲授3大协议陷阱与5步精准识别法
更多请点击: https://intelliparadigm.com 第一章:DeepSeek开源协议识别的底层逻辑与合规价值 DeepSeek系列模型(如DeepSeek-V2、DeepSeek-Coder)虽以“开源”名义发布,但其实际许可状态需通过结构化协议解析才能准确…...

内存占用3KB!极致瘦身释放MCU无限可能
极致小体积,给工业领域带来了无限的可能:更低硬件成本,更小芯片体积,更低功耗,更高可靠性,让每一颗小MCU都拥有大系统的完整能力。 https://www.bilibili.com/video/BV1eZLi6PEjc/?spm_id_from333.1387.ho…...

Unity发行版DLL调试实战:DnSpy无源码IL级断点指南
1. 这不是“反编译”,而是Unity游戏开发者的日常调试手段你有没有遇到过这样的情况:接手一个Unity发行版游戏,想快速验证某个功能逻辑是否按预期执行,或者排查一个偶发的崩溃,但手头只有打包后的Assembly-CSharp.dll&a…...

phpMyAdmin CVE-2018-12613:从文件读取到RCE的伪协议利用链
1. 这个漏洞不是“能读文件”那么简单,而是后台权限的彻底失守phpMyAdmin 4.8.1里那个CVE-2018-12613,很多人扫到就报个“存在文件包含”,顺手贴个?targetphp://filter/convert.base64-encode/resource/etc/passwd截图完事。我去年在给一家教…...

机器学习与深度学习在社交媒体心理健康检测中的权衡与选择
1. 项目概述:当AI遇见心灵,社交媒体心理健康检测的技术十字路口在社交媒体成为我们数字生活延伸的今天,海量的文本数据无意中记录着用户的情感波动与心理状态。作为一名长期混迹于数据科学和自然语言处理(NLP)一线的从…...

LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案
LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案 【免费下载链接】LDBlockShow LDBlockShow: a fast and convenient tool for visualizing linkage disequilibrium and haplotype blocks based on VCF files 项目地址: https://gitcode.com/gh_mirror…...
 指针的常见操作)
C语言(12) 指针的常见操作
指针的常见操作指针变量,有两方面的意思:一个指针指向的内容(数据值,一级)指针变量本身存储的数据 (地址值)#include <stdio.h>int main() {int a 10;int b 0 ;int c 50;int *p NULL;int *q NULL;p &a; // 对指针变量本身进行修改// 对指…...
)
YOLOv8道路交通信号标志识别检测系统(项目源码+YOLO数据集+模型权重+UI界面+python+深度学习+环境配置)
摘要 道路交通信号标志的自动检测是智能驾驶与交通管理系统中的核心环节。本文基于YOLOv8目标检测算法,构建了一个涵盖21类常见交通信号标志的检测系统,包括禁令标志、指示标志、警告标志及信号灯等。模型在包含1376张训练图像、488张验证图像和229张测…...