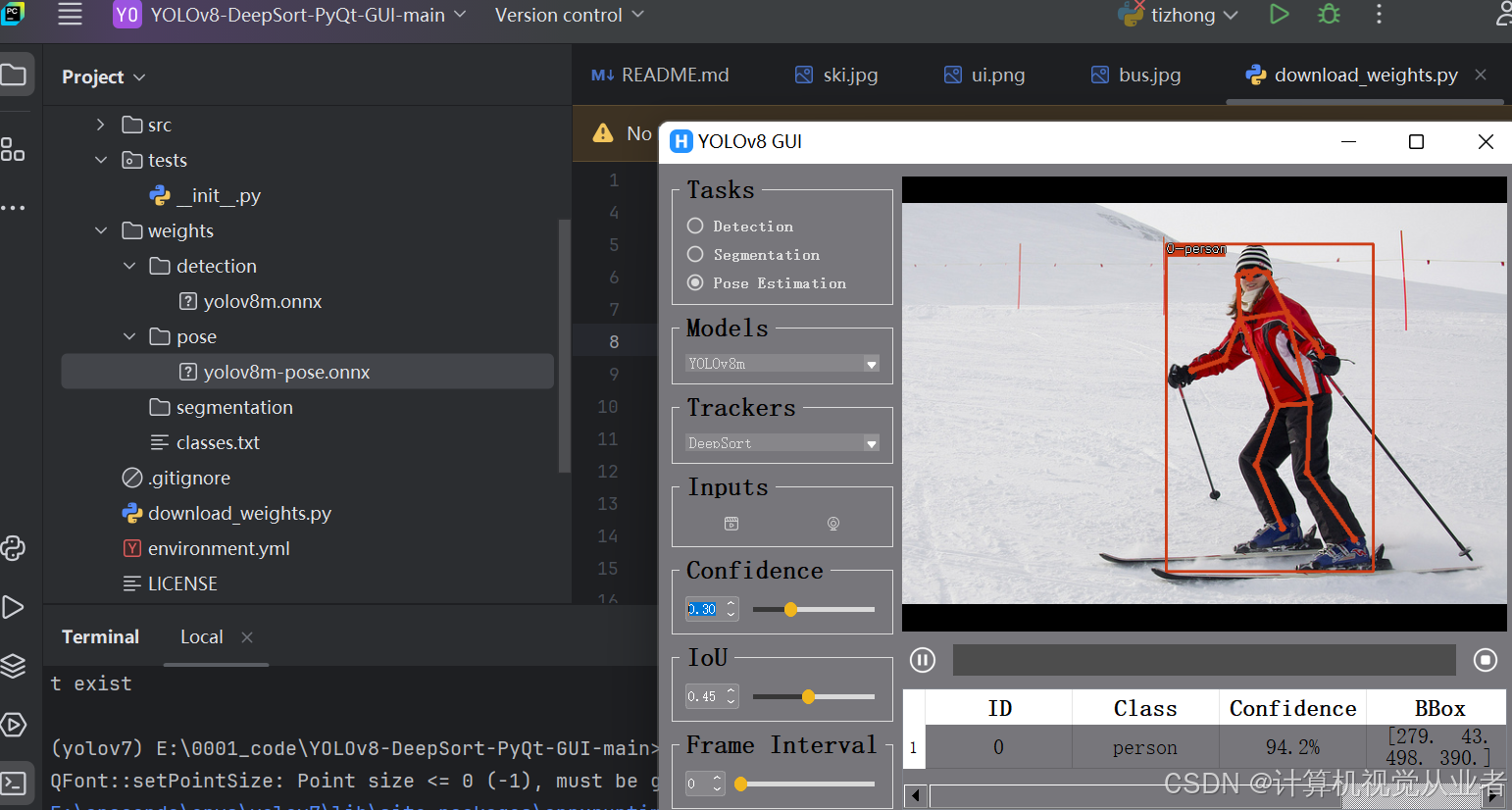
YOLOv8+Deepsort+PyQt+GUI 语义分割+目标检测+姿态识别 三者合一(集成于一套系统)综合视觉分析系统
综合视觉分析系统
技术栈:
- YOLOv8:用于目标检测,是一个快速且准确的目标检测框架。
- DeepSORT:用于目标跟踪,结合了深度学习特征提取和卡尔曼滤波器来预测目标轨迹。
- GUI:提供一个直观易用的图形用户界面,使得非技术用户也能方便地使用该系统。
- 语义分割:通过YOLOv8或其他语义分割算法,可以区分图像中的不同区域或对象,并赋予它们特定的标签。
- 姿态识别:利用深度学习模型来识别物体或人体的姿态,如关键点的位置等。
功能描述:
- 目标检测与分类:系统能够识别视频或图像中的特定对象,并对其进行分类。
- 目标跟踪:使用DeepSORT算法,可以在连续的视频帧中持续跟踪已识别的对象。
- 语义分割:系统不仅限于检测对象边界框,还能区分图像的不同部分,例如船只及其背景。
- 姿态识别:能够识别目标对象的姿态,对于人形目标来说,可以检测出肢体的关键点位置,对于其他类型的目标,则可以根据应用场景定制姿态识别功能。
- 实时展示与交互:通过GUI,用户可以实时查看处理结果,并与系统进行交互,比如调整参数、保存结果等。
应用场景:
- 安全监控:在机场、车站等人流密集场所,帮助识别异常行为或可疑人物。
- 智能交通管理:监控道路情况,识别车辆、行人等,并进行交通流量管理。
- 工业自动化:在生产线上,用于质量控制,识别产品缺陷。
- 无人机监控:在海上或空中,用于船只或飞行物的自动识别与跟踪。
优势:
- 高效性:由于采用了先进的深度学习模型,系统能够以较高的帧率处理视频数据。
- 准确性:通过优化后的模型,系统能更准确地区分不同的对象和背景。
- 易用性:图形用户界面使得配置和操作变得简单,降低了用户的使用门槛。
这样的系统可以为多种行业提供强大的视觉分析能力,具有广泛的应用前景。
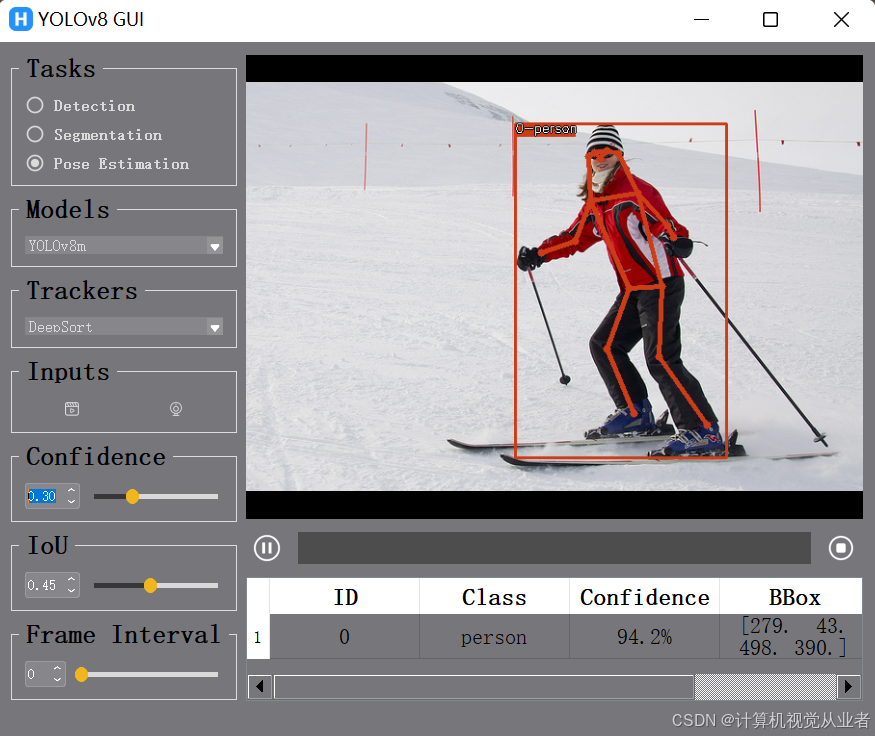
姿态识别:
关键代码:
main.py
from src.qt.stream.video_capture import CameraCaptureThread
from src.qt.stream.visualize import VideoVisualizationThread
from src.qt.stream.ai_worker import AiWorkerThread
from src.ui.main_window import Ui_MainWindow
from src.qt.video.video_worker import FileProcessThread
from PyQt5 import QtGui, QtWidgets
from PyQt5.QtCore import Qt
import sys
import numpy as np
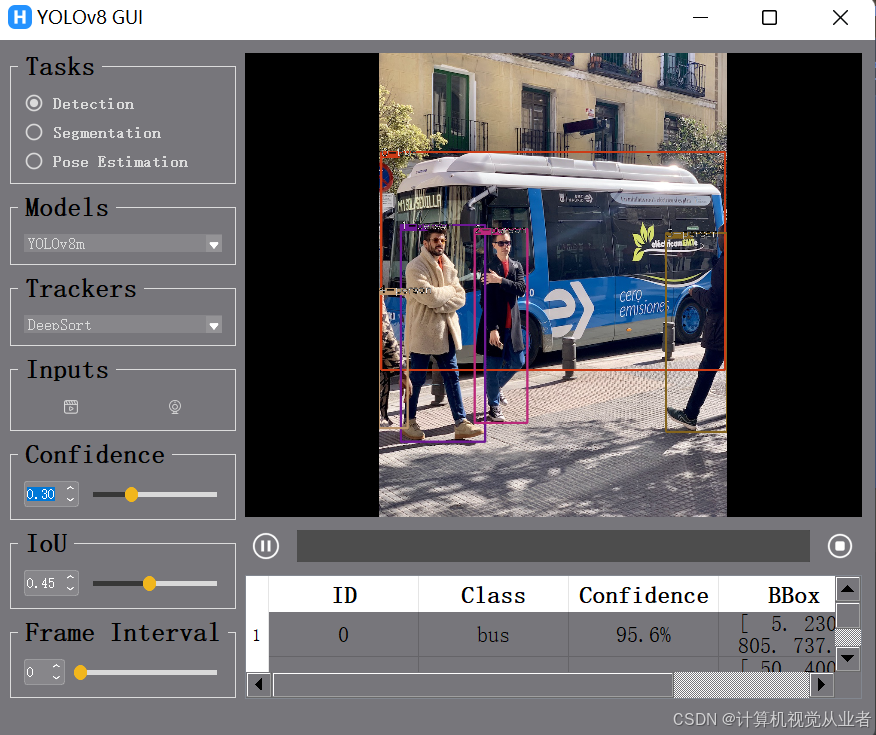
import cv2 as cvclass MainWindow(QtWidgets.QMainWindow, Ui_MainWindow):def __init__(self, parent=None):super(MainWindow, self).__init__(parent)self.setupUi(self)self.ai_thread = AiWorkerThread()self.camera_thread = CameraCaptureThread()self.display_thread = VideoVisualizationThread()self.file_process_thread = FileProcessThread()self.conf_thr = 0.3self.iou_thr = 0.45self.frame_interval = 0self.model_name = "yolov8n"self.ai_task = "object_detection"self.tracker_name = "deepsort"self.init_slots()self.buttons_states("waiting_for_setting")def init_slots(self):self.radioButton_det.toggled.connect(lambda: self.get_ai_task(self.radioButton_det))self.radioButton_pose.toggled.connect(lambda: self.get_ai_task(self.radioButton_pose))self.radioButton_seg.toggled.connect(lambda: self.get_ai_task(self.radioButton_seg))self.doubleSpinBox_conf.valueChanged.connect(lambda x: self.update_parameter(x, 'doubleSpinBox_conf'))self.doubleSpinBox_interval.valueChanged.connect(lambda x: self.update_parameter(x, 'doubleSpinBox_interval'))self.doubleSpinBox_iou.valueChanged.connect(lambda x: self.update_parameter(x, 'doubleSpinBox_iou'))self.horizontalSlider_conf.valueChanged.connect(lambda x: self.update_parameter(x, 'horizontalSlider_conf'))self.horizontalSlider_interval.valueChanged.connect(lambda x: self.update_parameter(x, 'horizontalSlider_interval'))self.horizontalSlider_iou.valueChanged.connect(lambda x: self.update_parameter(x, 'horizontalSlider_iou'))self.comboBox_model.currentTextChanged.connect(self.choose_model)self.comboBox_tracker.currentTextChanged.connect(self.choose_tracker)self.pushButton_cam.clicked.connect(self.process_camera)self.pushButton_file.clicked.connect(self.process_file)self.pushButton_stop.clicked.connect(self.stop_video)self.pushButton_play.clicked.connect(self.file_process_thread.toggle_play_pause)def resizeEvent(self, event:QtGui.QResizeEvent):self.screen_size = (self.label_display.width(), self.label_display.height())self.display_thread.get_screen_size(self.screen_size)self.file_process_thread.get_screen_size(self.screen_size)QtWidgets.QMainWindow.resizeEvent(self, event)def update_parameter(self, x, flag):if flag == 'doubleSpinBox_conf':self.horizontalSlider_conf.setValue(int(x*100))self.conf_thr = float(x)elif flag == 'doubleSpinBox_interval':self.horizontalSlider_interval.setValue(int(x))self.frame_interval = int(x)self.file_process_thread.set_frame_interval(self.frame_interval)elif flag == 'doubleSpinBox_iou':self.horizontalSlider_iou.setValue(int(x*100))self.iou_thr = float(x)elif flag == 'horizontalSlider_conf':self.doubleSpinBox_conf.setValue(x/100)self.conf_thr = float(x/100)elif flag == 'horizontalSlider_interval':self.doubleSpinBox_interval.setValue(x)self.frame_interval = int(x)self.file_process_thread.set_frame_interval(self.frame_interval)elif flag == 'horizontalSlider_iou':self.doubleSpinBox_iou.setValue(x/100)self.iou_thr = float(x/100)if self.ai_thread.isRunning:self.ai_thread.set_confidence_threshold(self.conf_thr)self.ai_thread.set_iou_threshold(self.iou_thr)if self.file_process_thread.isRunning:self.file_process_thread.set_confidence_threshold(self.conf_thr)self.file_process_thread.set_iou_threshold(self.iou_thr)def get_ai_task(self, btn):if btn.text() == 'Detection':if btn.isChecked() == True:self.ai_task = "object_detection"elif btn.text() == 'Pose Estimation':if btn.isChecked() == True:self.ai_task = "pose_detection"elif btn.text() == 'Segmentation':if btn.isChecked() == True:self.ai_task = "segmentation"def choose_model(self):self.model_name = self.comboBox_model.currentText()self.model_name = self.model_name.lower()def choose_tracker(self):self.tracker_name = self.comboBox_tracker.currentText()self.tracker_name = self.tracker_name.lower()def buttons_states(self, work_state):if work_state == "waiting_for_setting":self.radioButton_det.setDisabled(False)self.radioButton_pose.setDisabled(False)self.radioButton_seg.setDisabled(False)self.comboBox_model.setDisabled(False)self.comboBox_tracker.setDisabled(False)self.pushButton_cam.setDisabled(False)self.pushButton_file.setDisabled(False)self.pushButton_play.setDisabled(True)self.pushButton_stop.setDisabled(True)self.doubleSpinBox_conf.setDisabled(False)self.horizontalSlider_conf.setDisabled(False)self.doubleSpinBox_interval.setDisabled(False)self.horizontalSlider_interval.setDisabled(False)self.doubleSpinBox_iou.setDisabled(False)self.horizontalSlider_iou.setDisabled(False)self.doubleSpinBox_interval.setDisabled(False)self.horizontalSlider_interval.setDisabled(False)elif work_state == "processing_on_camera":self.pushButton_play.clickself.radioButton_det.setDisabled(True)self.radioButton_pose.setDisabled(True)self.radioButton_seg.setDisabled(True)self.comboBox_model.setDisabled(True)self.comboBox_tracker.setDisabled(True)self.pushButton_cam.setDisabled(True)self.pushButton_file.setDisabled(True)self.pushButton_play.setDisabled(True)self.pushButton_stop.setDisabled(False)self.doubleSpinBox_conf.setDisabled(False)self.horizontalSlider_conf.setDisabled(False)self.doubleSpinBox_interval.setDisabled(True)self.horizontalSlider_interval.setDisabled(False)self.doubleSpinBox_iou.setDisabled(False)self.horizontalSlider_iou.setDisabled(False)self.doubleSpinBox_interval.setDisabled(True)self.horizontalSlider_interval.setDisabled(True)elif work_state == "processing_on_file":self.radioButton_det.setDisabled(True)self.radioButton_pose.setDisabled(True)self.radioButton_seg.setDisabled(True)self.comboBox_model.setDisabled(True)self.comboBox_tracker.setDisabled(True)self.pushButton_cam.setDisabled(True)self.pushButton_file.setDisabled(True)self.pushButton_play.setDisabled(False)self.pushButton_stop.setDisabled(False)self.doubleSpinBox_conf.setDisabled(False)self.horizontalSlider_conf.setDisabled(False)self.doubleSpinBox_interval.setDisabled(False)self.horizontalSlider_interval.setDisabled(False)self.doubleSpinBox_iou.setDisabled(False)self.horizontalSlider_iou.setDisabled(False)self.doubleSpinBox_interval.setDisabled(False)self.horizontalSlider_interval.setDisabled(False)def process_camera(self):video_source = self.get_stream_source()print("SOURCE", video_source)if video_source is not None:self.ai_thread.set_start_config(ai_task=self.ai_task,model_name=self.model_name,tracker_name=self.tracker_name)self.camera_thread.set_start_config(video_source=video_source)self.display_thread.set_start_config([self.label_display.width(),self.label_display.height()])self.camera_thread.send_frame.connect(self.display_thread.get_fresh_frame)self.camera_thread.send_frame.connect(self.ai_thread.get_frame)self.ai_thread.send_ai_output.connect(self.display_thread.get_ai_output)self.display_thread.send_displayable_frame.connect(self.update_display_frame)self.display_thread.send_ai_output.connect(self.update_statistic_table)self.display_thread.send_thread_start_stop_flag.connect(self.buttons_states)self.ai_thread.start()self.display_thread.start()self.camera_thread.start()def process_file(self):img_fm = (".tif", ".tiff", ".jpg", ".jpeg", ".gif", ".png", ".eps", ".raw", ".cr2", ".nef", ".orf", ".sr2", ".bmp", ".ppm", ".heif")vid_fm = (".flv", ".avi", ".mp4", ".3gp", ".mov", ".webm", ".ogg", ".qt", ".avchd")file_list = " *".join(img_fm+vid_fm)file_name, _ = QtWidgets.QFileDialog.getOpenFileName(self, "choose an image or video file", "./data", f"Files({file_list})")if file_name:self.file_process_thread.set_start_config(video_path=file_name,ai_task=self.ai_task,screen_size=[self.label_display.width(),self.label_display.height()],model_name=self.model_name,tracker_name=self.tracker_name,confidence_threshold=self.conf_thr,iou_threshold=self.iou_thr,frame_interval=self.frame_interval)self.file_process_thread.send_ai_output.connect(self.update_statistic_table)self.file_process_thread.send_display_frame.connect(self.update_display_frame)self.file_process_thread.send_play_progress.connect(self.progressBar_play.setValue)self.file_process_thread.send_thread_start_finish_flag.connect(self.buttons_states)self.file_process_thread.start()def stop_video(self):self.display_thread.stop_display()self.ai_thread.stop_process()self.camera_thread.stop_capture()self.file_process_thread.stop_process()def update_display_frame(self, showImage):self.label_display.setPixmap(QtGui.QPixmap.fromImage(showImage))def clean_table(self):while (self.tableWidget_results.rowCount() > 0):self.tableWidget_results.removeRow(0)def update_statistic_table(self, ai_output):self.clean_table()self.tableWidget_results.setRowCount(0)if ai_output == []:returnfor box in ai_output:each_item = [str(box["id"]),str(box["class"]), "{:.1f}%".format(box["confidence"]*100), str(box["bbox"])]row = self.tableWidget_results.rowCount()self.tableWidget_results.insertRow(row)for j in range(len(each_item)):item = QtWidgets.QTableWidgetItem(str(each_item[j]))item.setTextAlignment(Qt.AlignHCenter | Qt.AlignVCenter)self.tableWidget_results.setItem(row, j, item)def get_stream_source(self):video_source, okPressed = QtWidgets.QInputDialog.getText(self, "Input Camera_ID or RTSP", "Camera ID or RTSP")if okPressed:if video_source.isdigit():return int(video_source)else:return video_sourceelse:return Noneif __name__ == '__main__':app = QtWidgets.QApplication(sys.argv)mainWindow = MainWindow()mainWindow.show()sys.exit(app.exec_())目标检测:
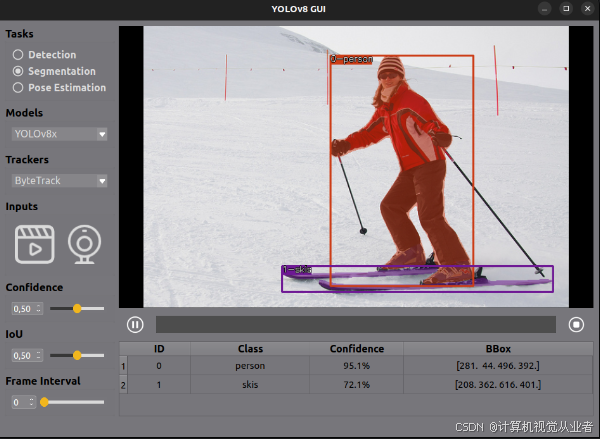
语义分割:
相关文章:
YOLOv8+Deepsort+PyQt+GUI 语义分割+目标检测+姿态识别 三者合一(集成于一套系统)综合视觉分析系统
综合视觉分析系统 技术栈: YOLOv8:用于目标检测,是一个快速且准确的目标检测框架。DeepSORT:用于目标跟踪,结合了深度学习特征提取和卡尔曼滤波器来预测目标轨迹。GUI:提供一个直观易用的图形用户界面&am…...

机器学习无监督学习
版权声明 本文原创作者:谷哥的小弟作者博客地址:http://blog.csdn.net/lfdfhl1. 无监督学习概述 1.1 定义与特点 无监督学习是一种数据挖掘技术,它允许机器通过观察数据来学习数据的内在结构和模式,而无需预先标注的输出变量。这种方法特别适用于数据探索和发现隐藏在数据…...

windows10-VMware17-Ubuntu-22.04-海康2K摄像头兼容问题,求解(已解决)
文章目录 1.webrtc camera测试2.ffmpeg 测试3.Ubuntu 自带相机4.解决办法 环境:windows10系统下,VMware的Ubuntu-22.04系统 问题:摄像头出现兼容问题,本来是想开发测试的,Ubuntu方便些。买了海康2K的USB摄像头…...

【系统架构设计师】解释器模式
解释器模式(Interpreter Pattern)是一种行为型设计模式,它定义了文法的表示,并定义了一个解释器,该解释器使用该表示来解释语言中的句子。在解释器模式中,通常包括一个抽象语法树(Abstract Synt…...

Hive原理剖析
1. 概述 背景介绍 Apache Hive是一个基于Hadoop的开源数据仓库软件,为分析和管理大量数据集提供了SQL-like的接口。最初由Facebook开发并贡献给Apache,Hive现已成为大数据处理领域的重要工具之一。它将传统的SQL功能与Hadoop的强大分布式处理能力结合&…...

在 Ubuntu 上查看重复文件
一般情况下 1. 使用 fdupes 工具 fdupes 是一个专门用于查找重复文件的工具。 安装: sudo apt-get install fdupes 使用: fdupes -r /path/to/directory -r 选项会递归查找子目录中的重复文件。 2. 使用 rmlint 工具 rmlint 是另一个强大的重复文件查找工具…...

docker容器高效连接 Redis 的方式
在微服务架构中,Redis 是一种常见的高效缓存解决方案,通常用于存储临时数据、会话信息或 token。如何在服务容器中高效、稳定地连接 Redis 是架构设计中的一个重要环节。 这篇博客将以实际项目为例,详细介绍如何配置 Flask 应用中的服务容器…...

手撕Python之生成器、装饰器、异常
1.生成器 生成器的定义方式:在函数中使用yield yield值:将值返回到调用处 我们需要使用next()进行获取yield的返回值 yield的使用以及生成器函数的返回的接收next() def test():yield 1,2,3ttest() print(t) #<generator object test at 0x01B77…...
LabVIEW步进电机控制方式
在LabVIEW中控制步进电机可以通过多种方式实现。每种方法都有其独特的优缺点,适用于不同的应用场合。下面详细介绍几种常见的步进电机控制方式,并进行比较。 1. 开环控制(Open-Loop Control) 特点 通过定期发出脉冲信号来控制步进…...

vllm源码解析(五):LLM模型推理
八 模型推理细节探索 8.1 回顾下step的流程 def step(self) -> List[Union[RequestOutput, EmbeddingRequestOutput]]:# 多GPU并行推理时走AsyncLLMEngine分支。如果进入当前LLMEngine,性能会下降,这里会抛出异常。if self.parallel_config.pipeline_parallel_s…...
数学建模笔记——熵权法(客观赋权法)
数学建模笔记——熵权法[客观赋权法] 熵权法(客观赋权法)1. 基本概念2. 基本步骤3. 典型例题3.1 正向化矩阵3.2 对正向化矩阵进行矩阵标准化3.3 计算概率矩阵P3.4 计算熵权3.5 计算得分 4. python代码实现 熵权法(客观赋权法) 1. 基本概念 熵权法,物理学名词,按照信息论基本原…...

XGBoost算法-确定树的结构
我们在求解上面的w和obj的过程中,都是假定我们的树结构是确定的,因为当我们改变树中划分条件的时候,每个叶子节点对应的样本有可能是不一样的,我们的G和H也是不一样的,得到的最优w和最优obj肯定也是不一样的。 到底哪一…...

concurrentHashMap线程安全实现的原理
1. Segment 数组 ConcurrentHashMap 内部维护一个 Segment 数组,每个 Segment 都是一个小型的 HashMap。Segment 继承自 ReentrantLock,因此每个 Segment 都是一个可重入锁。 2. 并发级别 ConcurrentHashMap 在构造时可以指定并发级别(con…...

域名证书,泛域名证书,sni
文章目录 前言一、证书1.全域名证书2.泛域名证书 二、域名证书的使用1、浏览器请求域名证书流程对全域名证书的请求流程对泛域名证书的请求流程ssl client-hello携带server name 报文 2、浏览器对证书的验证流程 三、域名证书和sni 前言 本文介绍了泛域名证书和全域名证书的区别…...

Pytest夹具autouse参数使用。True表示会自动在测试中使用,而无需显式指定
1. 全局conftest文件日志记录功能 # 当前路径(使用 abspath 方法可通过dos窗口执行) current_path os.path.dirname(os.path.abspath(__file__)) # 上上级目录 ffather_path os.path.abspath(os.path.join(current_path,"../"))LOG_FILE_PATH f{ffather_path}/lo…...

Linux:归档及压缩
tar命令 • tar 集成备份工具 – -c:创建归档 – -x:释放归档 – -f:指定归档文件名称,必须在所有选项的最后 – -z、-j、-J:调用 .gz、.bz2、.xz 格式工具进行处理 – -t:显示归档中的文件清单 – -C:指定…...

jenkins 安装
jenkins安装 jenkins官网 中文网址 安装设置 所有jenkins版本 内存512M以上,10Gb磁盘;安装jdk,需要java8以上下载较新的版本,否则安装插件时可能报错版本过低 # 搜索java yum search java | grep -iE "jdk"# 安装jd…...
)
mysql学习教程,从入门到精通,MySQL 删除数据库教程(6)
1、MySQL 删除数据库 使用普通用户登陆 MySQL 服务器,你可能需要特定的权限来创建或者删除 MySQL 数据库,所以我们这边使用 root 用户登录,root 用户拥有最高权限。 在删除数据库过程中,务必要十分谨慎,因为在执行删除…...
)
C语言:刷题日志(2)
一.币值转换 输入一个整数(位数不超过9位)代表一个人民币值(单位为元),请转换成财务要求的大写中文格式。如23108元,转换后变成“贰万叁仟壹百零捌”元。为了简化输出,用小写英文字母a-j顺序代…...

微带结环行器仿真分析+HFSS工程文件
微带结环行器仿真分析HFSS工程文件 工程下载:微带结环行器仿真分析HFSS工程文件 我使用HFSS版本的是HFSS 2024 R2 参考书籍《微波铁氧体器件HFSS设计原理》和视频微带结环行器HFSS仿真 1、环形器简介 环行器是一个有单向传输特性的三端口器件,它表明…...

老Mac焕新秘籍:3个步骤让你的旧设备运行最新macOS系统
老Mac焕新秘籍:3个步骤让你的旧设备运行最新macOS系统 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 你是否还在为手中的老款Mac无法升级到最新系…...
:仅开放前500份)
ChatGPT新闻稿写作终极模板包(含敏感词实时拦截表+信源可信度打分卡+记者视角反问清单):仅开放前500份
更多请点击: https://kaifayun.com 第一章:ChatGPT新闻稿写作终极模板包概览 本模板包专为公关、市场与内容团队设计,整合了新闻稿结构化框架、语义优化提示词库、合规性检查清单及多平台适配输出模块,支持从初稿生成到终稿发布…...

Poppins字体:终极多语言开源字体解决方案,9种字重+天城文支持
Poppins字体:终极多语言开源字体解决方案,9种字重天城文支持 【免费下载链接】Poppins Poppins, a Devanagari Latin family for Google Fonts. 项目地址: https://gitcode.com/gh_mirrors/po/Poppins 还在为多语言项目寻找完美的字体解决方案吗…...

机器学习数据安全新视角:高价值样本的脆弱性与差异化防御策略
1. 项目概述与核心问题在机器学习的实际部署中,我们常常面临一个看似矛盾的局面:那些对模型性能提升贡献最大的“高价值”数据,是否也恰恰是系统中最脆弱的环节?这个问题在过去几年里一直萦绕在我的心头。无论是构建一个图像分类器…...

D2DX终极指南:暗黑破坏神2现代重生的技术架构与实战配置
D2DX终极指南:暗黑破坏神2现代重生的技术架构与实战配置 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx D2DX是一…...

Taotoken模型广场如何辅助开发者进行多模型选型与对比
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken模型广场如何辅助开发者进行多模型选型与对比 面对市场上众多的大模型,开发者在进行技术选型时常常需要花费大…...

Adobe-GenP 3.0终极指南:5分钟掌握Adobe全系列软件激活技巧
Adobe-GenP 3.0终极指南:5分钟掌握Adobe全系列软件激活技巧 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP Adobe-GenP 3.0是一款功能强大的Adobe Creat…...

CentOS 7 Minimal安装后,别急着装图形界面!先试试这个命令搞定粘贴和联网
CentOS 7 Minimal安装后的高效运维起点:命令行解决粘贴与联网难题当你第一次启动刚安装好的CentOS 7 Minimal系统,面对漆黑终端闪烁的光标,是否感到一丝不安?许多新手在遇到无法从宿主机粘贴命令或无法联网时,第一反应…...

终极FFXIV模组管理器:TexTools完全使用指南与实战教程
终极FFXIV模组管理器:TexTools完全使用指南与实战教程 【免费下载链接】FFXIV_TexTools_UI 项目地址: https://gitcode.com/gh_mirrors/ff/FFXIV_TexTools_UI 你是否厌倦了在《最终幻想14》中与其他玩家穿着相同的装备?是否梦想着为你的光之战士…...

MySQL 空间数据类型 GIS:地图功能的数据库实现
开场白 做 LBS(基于位置的服务)的时候,很多人直接用经纬度两个字段存,然后算距离用公式在应用层算。数据量小的时候没问题,数据一大,每次查附近的人都要全表扫描算一遍距离,性能根本扛不住。我…...