BEV学习---LSS-2
- 前言
- 一、相关参数设置
- 二、LSS算法前向过程
- 1.整体步骤
- 2.创建视锥
- 3.坐标变换
- 4.视锥点云特征
- 5.VoxelPooling
- 5.1 cumsum_trick(池化累积求和技巧):
- 5.2 VoxelPooling
- 总结
前言
目前在自动驾驶领域,比较火的一类研究方向是基于采集到的环视图像信息去构建BEV视角下的特征完成自动驾驶感知的相关任务。所以如何准确的完成从相机视角向BEV视角下的转变就变得由为重要。
目前感觉比较主流的方法可以大体分为2种:
1、显式估计图像的深度信息,完成BEV视角的构建,有文章也称其为自下而上的构建方式,代表作品有LSS、 BEVDet、BEVDepth等;
2、利用Transformer中的query查询机制(利用BEV Query构建BEV特征),这一过程也被称为自上而下的构建方式,代表作品有BEVFormer、PETR等;
LSS这篇论文的核心则是通过显式估计图像的深度信息,对采集到的环视图像进行特征提取,并根据估计出来的离散深度信息,实现图像特征向BEV特征的转换,进而完成自动驾驶中的语义分割任务。


一、相关参数设置
对于感知算法而言,比较重要的是要了解在BEV视角下,x轴和y轴方向的感知距离,以及BEV网格的单位大小。
在自车周围俯视平面x-y方向划分n个网格,每个网格表示特定物理距离d m。如200×200的BEV网格,每格代表0.5m,这个网格就表示100m的平面范围。如果恰好自车中心在网格中心位置,那么网格就表示自车前、后和左、右各50m的范围。注意这里强调用网格划分平面空间,并不涉及网格内的特征。
在LSS源码中,其感知范围,BEV单元格大小,BEV下的网格尺寸如下:
1、感知范围
x轴方向的感知范围-50m~50m;y轴方向的感知范围-50m~50m;z轴方向的感知范围 -10m ~10m;
2、BEV单元格大小
x轴方向的单位长度 0.5m;y轴方向的单位长度 0.5m;z轴方向的单位长度20m;
3、BEV的网格尺寸
200 × 200 × 1;
4、深度估计范围
由于LSS需要显式估计像素的离散深度,论文给出的范围是 4m ~ 45m,间隔为1m,也就是算法会估计41个离散深度;

二、LSS算法前向过程
1.整体步骤
在进行详细描述LSS算法前向过程之前,先整体概括下LSS算法包括的5个步骤:
1、生成视锥,并根据相机内外参将视锥中的点投影到ego坐标系
需要注意的是,生成的锥点位置是基于图像坐标系,同时锥点是图像特征上每个单元格映射回原始图像的位置;一般分为两步来做,即视锥生成和锥点由图像坐标系向ego坐标系的坐标转换;
2、对环视图像完成特征提取,并构建图像特征点云
2.1、先利用Efficientnet-B0对环视图像进行特征提取(输入的环视图像 (bs,N,3,H,W),在进行特征提取之前,会将前两个维度进行合并提取特征,对应维度变换为 (bs,N,3,H,W) -> (bs*N,3,H,W));
2.2、对其中的后两层特征进行融合,丰富特征的语义信息,融合后的特征尺寸大小为 (bs*N,512,H /16,W/16);
2.3、估计深度方向的概率分布并输出特征图每个位置的语义特征 (用64维的特征表示),整个过程用1x1卷积层实现;
2.4、对2.3步骤估计出来的离散深度利用softmax函数计算深度方向的概率密度;
2.5、利用得到的深度方向的概率密度和语义特征通过外积运算构建图像特征点云。
3、利用变换后的ego坐标系的点和图像特征点云利用Voxel Pooling构建BEV特征;
4、对生成的BEV特征利用BEV Encoder做进一步的特征融合,然后对特征融合后的BEV特征进行语义分割;4.1、对BEV特征先利用ResNet-18进行多尺度特征提取;
4.2、对输出的多尺度特征进行特征融合 + 对融合后的特征实现BEV网格上的语义分割;
5、最后,将输出的语义分割结果与binimgs的真值做基于像素的交叉熵损失,从而指导模型的学习。
2.创建视锥
生成视锥,最后得到 D × H × W × 3的张量,这里的张量存储的是视锥点云坐标,也就是常见的(d,u,v)坐标。其中:
D的取值范围为:[ 4., 5., 6., 7., 8., 9., 10., 11., 12., 13., 14., 15., 16., 17., 18., 19., 20., 21., 22., 23., 24., 25., 26., 27., 28., 29., 30., 31., 32., 33., 34., 35., 36., 37., 38., 39., 40., 41., 42., 43., 44.],得到41个离散深度值;
H的取值范围为:[0.0000, 18.1429, 36.2857, 54.4286, 72.5714, 90.7143, 108.8571, 127.0000],在图像高度上8等分(16倍降采样);
W的取值范围为:[0.0000, 16.7143, 33.4286, 50.1429, 66.8571, 83.5714, 100.2857, 117.0000, 133.7143, 150.4286, 167.1429, 183.8571, 200.5714, 217.2857, 234.0000, 250.7143, 267.4286, 284.1429, 300.8571, 317.5714, 334.2857, 351.0000],在图像宽度上22等分(16倍降采样);
def create_frustum(self):# 原始图片大小, ogfH:128 ogfW:352ogfH, ogfW = self.data_aug_conf['final_dim']# 下采样16倍后图像大小,fH: 8 fW: 22fH, fW = ogfH // self.downsample, ogfW // self.downsample# self.grid_conf['dbound'] = [4, 45, 1]# 在深度方向上划分网格,ds:D×fH×fW (41*8*22)ds = torch.arange(*self.grid_conf['dbound'], dtype=torch.float).view(-1, 1, 1).expand(-1, fH, fW)D, _, _ = ds.shape # D:41 表示深度方向上网格的数量# 在0到351上划分22个格子 xs:D×fH×fW (41×8×22)xs = torch.linspace(0, ogfW - 1, fW, dtype=torch.float).view(1, 1, fW).expand(D, fH, fW)# 在0到127上划分8个格子 ys:D×fH×fW (41×8×22)ys = torch.linspace(0, ogfH - 1, fH, dtype=torch.float).view(1, fH, 1).expand(D, fH, fW)# D x H x W x 3# 堆积起来形成网格坐标,frustum[i,j,k,0]就是(i,j)的位置# 深度为k的像素的宽度方向上的栅格坐标frustum:D×fH×fW×3frustum = torch.stack((xs, ys, ds), -1)return nn.Parameter(frustum, requires_grad=False)
3.坐标变换
Get_Geometry():利用内外参,对N个相机视锥进行坐标变换,输出视锥点云在自车周围物理空间的位置索引;
对N个相机的视锥进行坐标变换,简单来说就是内外参以及6个视角的变换,输出结果是B×N×D×H×W×3,其中3是ego坐标系下的空间位置[x,y,z],B是batch_id,N是相机个数, D是深度分布数。
这样就等同于把ego周围空间划分为D×H×W块;
def get_geometry(self, rots, trans, intrins, post_rots, post_trans):""" rots:相机外参旋转, trans:相机外参平移, intrins:相机内参, post_rots:数据增强旋转, post_trans:数据增强平移Determine the (x,y,z) locations (in the ego frame) of the points in the point cloud.Returns B x N x D x H/downsample x W/downsample x 3"""B, N, _ = trans.shape # B: batch size N:环视相机个数# undo post-transformation# B x N x D x H x W x 3# 抵消数据增强及预处理对像素的变化,即还原数据增强中旋转和平移对坐标的影响points = self.frustum - post_trans.view(B, N, 1, 1, 1, 3)points = torch.inverse(post_rots).view(B, N, 1, 1, 1, 3, 3).matmul(points.unsqueeze(-1))# 图像坐标系 -> 归一化相机坐标系 -> 相机坐标系 -> 车身坐标系# 但是自认为由于转换过程是线性的,所以反归一化是在图像坐标系完成的,然后再利用# 求完逆的内参投影回相机坐标系points = torch.cat((points[:, :, :, :, :, :2] * points[:, :, :, :, :, 2:3],points[:, :, :, :, :, 2:3]), 5) # 反归一化combine = rots.matmul(torch.inverse(intrins))points = combine.view(B, N, 1, 1, 1, 3, 3).matmul(points).squeeze(-1)points += trans.view(B, N, 1, 1, 1, 3)# (bs, N, depth, H, W, 3):其物理含义# 每个batch中的每个环视相机图像特征点,其在不同深度下位置对应# 在ego坐标系下的坐标return points #维度不变,坐标值从相机坐标系->世界坐标系
4.视锥点云特征
观察下面的网格图,首先解释一下网格图的坐标,其中 α 代表某一个深度 softmax 概率(大小为H×W),c代表语义特征的某一个channel的特征图,那么 αc 就表示这两个矩阵的对应元素相乘,于是就为特征图的每一个点赋予了一个depth 概率,然后广播所有的 αc,就得到了不同的channel的语义特征在不同深度(channel)的特征图,经过训练,重要的特征颜色会越来越深(由于 softmax 概率高),反之就会越来越暗淡,趋近于0。

对原始图像进行逐个图像特征点地进行深度和语义的预测,输出视锥点云特征:
1、首先对原始图像通过EfficientNet学习特征;
2、然后一层卷积直接出D+C的维度,D属于深度分布,C是语义特征;
3、对D维深度做 softmax 归一化;
4、将D与C做外积;
5、最终输出的是H×W×D×C;
6、B×N张图像,对应的输出就是 B×N×H×W×D×C。
class CamEncode(nn.Module): # 提取图像特征,进行图像深度编码def __init__(self, D, C, downsample):super(CamEncode, self).__init__()self.D = D # 41 深度区间【4-45】self.C = C # 64 点的特征向量维度# efficientnet 提取特征self.trunk = EfficientNet.from_pretrained("efficientnet-b0")self.up1 = Up(320+112, 512) # 上采样模块,输入320+112(多尺度融合),输出通道512# 1x1卷积调整通道数,输出通道数为D+C,D为可选深度值个数,C为特征通道数self.depthnet = nn.Conv2d(512, self.D + self.C, kernel_size=1, padding=0)# 深度维计算softmax,得到每个像素不同深度的概率def get_depth_dist(self, x, eps=1e-20):return x.softmax(dim=1)def get_depth_feat(self, x):# 使用efficientnet提取主干网络特征 x: BN x 512 x 8 x 22x = self.get_eff_depth(x)# 1x1卷积变换维度,输出通道数为D+C,x: BN x 105(C+D) x 8 x 22x = self.depthnet(x)# softmax编码,理解为每个可选深度的权重# 第二个维度的前D个作为深度维,进行softmax depth: BN x 41 x 8 x 22depth = self.get_depth_dist(x[:, :self.D])# 将深度概率分布和特征通道利用广播机制相乘# 深度值 * 特征 = 2D特征转变为3D空间(俯视图)内的特征new_x = depth.unsqueeze(1) * x[:, self.D:(self.D + self.C)].unsqueeze(2)return depth, new_x # new_x: BN x 64 x 41 x 8 x 22def get_eff_depth(self, x): # 使用efficientnet提取特征# adapted from https://github.com/lukemelas/EfficientNet-PyTorch/blob/master/efficientnet_pytorch/model.py#L231endpoints = dict()# Stemx = self.trunk._swish(self.trunk._bn0(self.trunk._conv_stem(x))) # x: BN x 32 x 64 x 176prev_x = x # Blocksfor idx, block in enumerate(self.trunk._blocks):drop_connect_rate = self.trunk._global_params.drop_connect_rateif drop_connect_rate:drop_connect_rate *= float(idx) / len(self.trunk._blocks) # scale drop connect_ratex = block(x, drop_connect_rate=drop_connect_rate)if prev_x.size(2) > x.size(2):endpoints['reduction_{}'.format(len(endpoints)+1)] = prev_xprev_x = x# Headendpoints['reduction_{}'.format(len(endpoints)+1)] = x # x: BN x 320 x 4 x 11x = self.up1(endpoints['reduction_5'], endpoints['reduction_4']) # 对endpoints[4]上采样,然后和endpoints[5] concat 在一起return x # x: 24 x 512 x 8 x 22def forward(self, x):# depth: B*N x D x fH x fW(24 x 41 x 8 x 22) x: B*N x C x D x fH x fW(24 x 64 x 41 x 8 x 22)depth, x = self.get_depth_feat(x)return x
5.VoxelPooling
VoxelPooling():将上述Get_Geometry()和Cam_Encode()的输出作为输入,根据视锥点云在ego周围空间的位置索引,把点云特征分配到BEV pillar中,然后对同一个pillar中的点云特征进行sum-pooling处理,输出B,C,X,Y的BEV特征。
具体步骤如下:
1、首先将点云特征reshape成M×C,其中M=B×N×D×H×W;
2、然后将Get_Geometry()输出的空间点云转换到体素坐标下,得到对应的体素坐标。并通过范围参数过滤掉无用的点;
3、将体素坐标展平,reshape成一维的向量,然后对体素坐标中B、X、Y、Z的位置索引编码,然后对位置进行argsort,这样就把属于相同BEV pillar的体素放在相邻位置,得到点云在体素中的索引。
4、然后是一个神奇的操作,对每个体素中的点云特征进行sumpooling,代码中使用了cumsum_trick,巧妙地运用前缀和以及argsort的索引。输出是去重之后的Voxel特征,B×C×Z×X×Y。
5、最后使用unbind将Z维度切片,然后cat到C的维度上。代码中Z维度为1,实际效果就是去掉了Z维度,输出为B×C×X×Y的BEV 特征图。B×N张图像,对应的输出就是B×N×H×W×D×C;
5.1 cumsum_trick(池化累积求和技巧):
模型中使用Pillar累积求和池化,“累积求和”是通过bin id 对所有点进行排序,对所有特征执行累积求和,然后减去 bin 部分边界处的累积求和值来执行求和池化。无需依赖 autograd 通过所有3个步骤进行反向传播,而是可以导出整个模块的分析梯度,从而将训练速度提高 2 倍。
该层被称为“Frustum Pooling”,因为它将 n 个图像产生的截锥体转换为与摄像机数量 n 无关的固定维度 C×H×W 张量。
计算原理的过程示意图:

5.2 VoxelPooling
def voxel_pooling(self, geom_feats, x):# geom_feats: B x N x D x H x W x 3 (4 x 6 x 41 x 8 x 22 x 3):在ego坐标系下的坐标点;# x: B x N x D x fH x fW x C(4 x 6 x 41 x 8 x 22 x 64):图像点云特征B, N, D, H, W, C = x.shape # B: 4 N: 6 D: 41 H: 8 W: 22 C: 64Nprime = B*N*D*H*W # Nprime: 173184# flatten xx = x.reshape(Nprime, C) # 将特征点云展平,一共有 B*N*D*H*W 个点# flatten indicesgeom_feats = ((geom_feats - (self.bx - self.dx/2.)) / self.dx).long() # 将ego下的空间坐标[-50,50] [-10 10]的范围平移转换到体素坐标[0,100] [0,20],计算栅格坐标并取整geom_feats = geom_feats.view(Nprime, 3) # 将体素坐标同样展平 geom_feats: B*N*D*H*W x 3 (173184 x 3)batch_ix = torch.cat([torch.full([Nprime//B, 1], ix,device=x.device, dtype=torch.long) for ix in range(B)]) # 每个点对应于哪个batchgeom_feats = torch.cat((geom_feats, batch_ix), 1) # geom_feats: B*N*D*H*W x 4(173184 x 4), geom_feats[:,3]表示batch_id# filter out points that are outside box# 过滤掉在边界线之外的点 x:0~199 y: 0~199 z: 0kept = (geom_feats[:, 0] >= 0) & (geom_feats[:, 0] < self.nx[0])\& (geom_feats[:, 1] >= 0) & (geom_feats[:, 1] < self.nx[1])\& (geom_feats[:, 2] >= 0) & (geom_feats[:, 2] < self.nx[2])x = x[kept] # x: 168648 x 64geom_feats = geom_feats[kept]# get tensors from the same voxel next to each otherranks = geom_feats[:, 0] * (self.nx[1] * self.nx[2] * B)\+ geom_feats[:, 1] * (self.nx[2] * B)\+ geom_feats[:, 2] * B\+ geom_feats[:, 3] # 给每一个点一个rank值,rank相等的点在同一个batch,并且在在同一个格子里面sorts = ranks.argsort()x, geom_feats, ranks = x[sorts], geom_feats[sorts], ranks[sorts] # 按照rank排序,这样rank相近的点就在一起了# x: 168648 x 64 geom_feats: 168648 x 4 ranks: 168648# cumsum trickif not self.use_quickcumsum:x, geom_feats = cumsum_trick(x, geom_feats, ranks)else:x, geom_feats = QuickCumsum.apply(x, geom_feats, ranks) # 一个batch的一个格子里只留一个点 x: 29072 x 64 geom_feats: 29072 x 4# griddify (B x C x Z x X x Y)final = torch.zeros((B, C, self.nx[2], self.nx[0], self.nx[1]), device=x.device) # final: 4 x 64 x 1 x 200 x 200final[geom_feats[:, 3], :, geom_feats[:, 2], geom_feats[:, 0], geom_feats[:, 1]] = x # 将x按照栅格坐标放到final中# collapse Zfinal = torch.cat(final.unbind(dim=2), 1) # 消除掉z维return final # final: 4 x 64 x 200 x 200总结
LSS的优点:
1、LSS的方法提供了一个很好的融合到BEV视角下的方法。基于此方法,无论是动态目标检测,还是静态的道路结构认知,甚至是红绿灯检测,前车转向灯检测等等信息,都可以使用此方法提取到BEV特征下进行输出,极大地提高了自动驾驶感知框架的集成度。
2、虽然LSS提出的初衷是为了融合多视角相机的特征,为“纯视觉”模型而服务。但是在实际应用中,此套方法完全兼容其他传感器的特征融合。如果你想融合超声波雷达特征也不是不可以试试。
LSS的缺点:
1、极度依赖Depth信息的准确性,且必须显示地提供Depth 特征。当然,这是大部分纯视觉方法的硬伤。如果直接使用此方法通过梯度反传促进Depth网络的优化,如果Depth 网络设计的比较复杂,往往由于反传链过长使得Depth的优化方向比较模糊,难以取得较好效果。当然,一个好的解决方法是先预训练好一个较好的Depth权重,使得LSS过程中具有较为理想的Depth输出。
2、外积操作过于耗时。虽然对于机器学习来说,这样的计算量不足为道,但是对于要部署到车上的模型,当图片的feature size 较大, 且想要预测的Depth距离和精细度高时,外积这一操作带来的计算量则会大大增加。这十分不利于模型的轻量化部署,而这一点上,Transformer的方法反而还稍好一些。
相关文章:
BEV学习---LSS-2
前言一、相关参数设置二、LSS算法前向过程 1.整体步骤2.创建视锥3.坐标变换4.视锥点云特征5.VoxelPooling 5.1 cumsum_trick(池化累积求和技巧):5.2 VoxelPooling总结 前言 目前在自动驾驶领域,比较火的一类研究方向是基于采集到的环视图像信息去构建BEV视角下的特征…...

PhpStudy下载安装使用学习
一、官网下载 官网地址:Windows版phpstudy下载 - 小皮面板(phpstudy)https://old.xp.cn/download.html 【首页】选择Windows版,进行下载 下载完成是一个压缩包的形式,解压得到一个.exe的执行文件,点击执行安装程序(注…...
在Excel中通过Python运行公式和函数实现数据计算
目录 一、引言 1.1 背景介绍 1.2 Python in Excel 的意义 二、环境准备 2.1 安装必要的软件 2.2 配置 Excel 三、基础操作 3.1 输入 Python 代码 3.2 调用 Python 库 四、案例分析 4.1 数据读取与处理 4.1.1 读取 Excel 数据 4.1.2 数据处理 4.2 数据可视化 4.2…...

基于SpringBoot+Vue的美妆购物系统
作者:计算机学姐 开发技术:SpringBoot、SSM、Vue、MySQL、JSP、ElementUI、Python、小程序等,“文末源码”。 专栏推荐:前后端分离项目源码、SpringBoot项目源码、SSM项目源码 系统展示 【2025最新】基于JavaSpringBootVueMySQL的…...

uniapp uni-table合并单元格
视图层 <uni-table border stripe emptyText"暂无更多数据" class"table_x"><!-- 表头行 --><uni-tr><uni-th align"center">患者姓名</uni-th><uni-th align"center">透析方式</uni-th>&…...

MySQL 创建数据库和表全攻略
一、MySQL 创建数据库与表的重要性 MySQL 作为广泛应用的关系型数据库管理系统,创建数据库和表具有至关重要的意义。 在数据存储方面,数据库就如同一个巨大的仓库,为各类数据提供了安全、有序的存储环境。通过创建数据库,可以将相…...

大数据-126 - Flink State 03篇 状态原理和原理剖析:状态存储 Part1
点一下关注吧!!!非常感谢!!持续更新!!! 目前已经更新到了: Hadoop(已更完)HDFS(已更完)MapReduce(已更完&am…...

RFID射频模块(MFRC522 STM32)
目录 一、介绍 二、传感器原理 1.原理图 2.引脚描述 3.工作原理介绍 三、程序设计 main.c文件 MFRC522.h文件 MFRC522.c文件 四、实验效果 五、资料获取 项目分享 一、介绍 RC522 RFID射频模块是一款广泛应用于非接触式RFID系统中的核心组件,由NXP&…...

【JavaSE】--方法的使用
文章目录 1. 方法概念及使用1.1 什么是方法1.2 方法定义1.3 方法调用的执行过程1.4 实参和形参的关系(重要)1.5 没有返回值的方法 2. 方法重载2.1 方法重载概念2.2 方法签名 3. 递归3.1 递归的概念3.2 递归执行过程分析3.3 递归练习 1. 方法概念及使用 1…...

wireshark打开时空白|没有接口,卸载重装可以解决
解决方法:卸载wireshark,全选卸载干净,重新安装旧版的wireshark4.2.7, 甚至cmd下运行net start npf时显示服务名无效,但打开wireshark仍有多个接口 错误描述: 一开始下载的是wireshark的最新版,win11 x64 在安装wir…...
单值二叉树--(C语言)
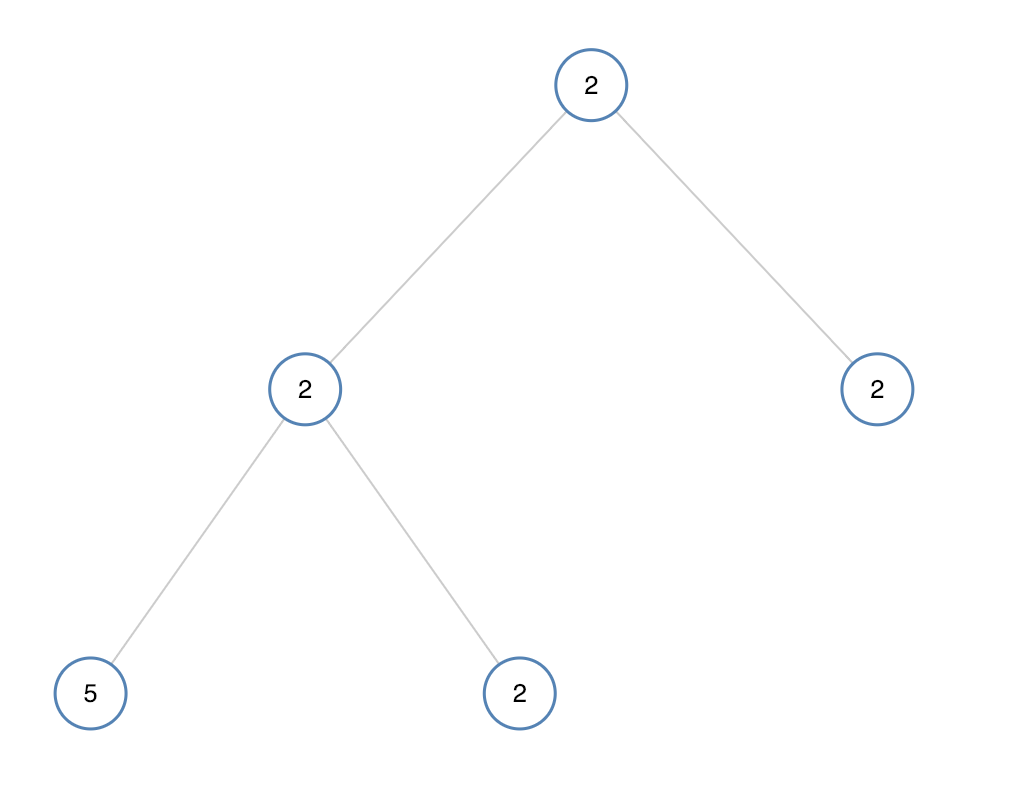
题目如下: 如果二叉树每个节点都具有相同的值,那么该二叉树就是单值二叉树。 只有给定的树是单值二叉树时,才返回 true;否则返回 false。 示例 1: 输入:[1,1,1,1,1,null,1] 输出:true示例 2&a…...

Linux云计算 |【第三阶段】PROJECT1-DAY2
主要内容: 网站架构演变、LNPMariadb数据库分离、Web服务器集群(部署Nginx后端web服务器、部署NFS共享存储服务器、部署Haproxy代理服务器、部署DNS域名解析服务器) 一、网站架构演变: 随着网站访问量和业务复杂度的增加&#x…...

Claude Prompt 汉语新解
感谢刚哥! ;; 作者: 李继刚 ;; 版本: 0.3 ;; 模型: Claude Sonnet ;; 用途: 将一个汉语词汇进行全新角度的解释 ;; 设定如下内容为你的 *System Prompt* (defun 新汉语老师 () "你是年轻人,批判现实,思考深刻,语言风趣" (风格 . ("Oscar Wilde&q…...

【运维监控】influxdb 2.0+grafana 监控java 虚拟机以及方法耗时情况(2)
运维监控系列文章入口:【运维监控】系列文章汇总索引 文章目录 四、grafana集成influxdb监控java 虚拟机以及方法耗时情况1、添加grafana数据源2、添加grafana的dashboard1)、选择新建dashboard方式2)、导入dashboard 3、验证 关于java应用的…...

怎么看待伦敦银交易的风险与收益?
伦敦银交易的风险与收益,在宣传材料中,伦敦银是一种潜在收益很高,潜在风险不大的品种。然而在实践中我们发现,伦敦银交易好像并不如宣传材料说的那样容易做。那么,具体伦敦银交易的风险和收益是怎么样的?那…...

如何通俗易懂的解释TON的智能合约
文章目录 一、小故事一则二、Ton的智能合约在小故事中三、python代码模拟 一、小故事一则 在一个遥远的国度里,有一个被魔法笼罩的小镇,这个小镇每年都会举办一场盛大的戏剧节。这个戏剧节不仅是演员们展示才华的舞台,更是他们交流心得、共同…...

针对Docker容器的可视化管理工具—DockerUI
目录 ⛳️推荐 前言 1. 安装部署DockerUI 2. 安装cpolar内网穿透 3. 配置DockerUI公网访问地址 4. 公网远程访问DockerUI 5. 固定DockerUI公网地址 ⛳️推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…...

五大注入攻击网络安全类型介绍
1. SQL注入(SQL Injection) SQL注入流程 1.1. 概述 SQL注入是最常见的注入攻击类型之一,攻击者通过在输入字段中插入恶意的SQL代码来改变原本的SQL逻辑或执行额外的SQL语句,来操控数据库执行未授权的操作(如拖库、获取…...

linux-L9.linux中对文件 按照时间排序 显示100 个
find . -type f -exec stat --format %Y %n {} | sort -nr | head -n 100解释: • find . -type f:在当前目录下查找所有文件。 • -exec stat --format ‘%Y %n’ {} :对每个找到的文件执行stat命令,以获取文件的修改时间&#…...
springboot从分层到解耦
注释很详细,直接上代码 三层架构 项目结构 源码: HelloController package com.amoorzheyu.controller;import com.amoorzheyu.pojo.User; import com.amoorzheyu.service.HelloService; import com.amoorzheyu.service.impl.HelloServiceA; import o…...
)
告别点点点!用Ranorex Studio录制你的第一个计算器自动化测试(附详细截图)
从零开始:用Ranorex Studio实现计算器自动化测试的完整指南 第一次接触自动化测试时,那种既期待又忐忑的心情我至今记忆犹新。作为一位长期被重复性手工测试困扰的QA工程师,每天面对相同的测试用例,点击相同的按钮,验证…...

TCA白皮书解读:腾讯内部CodeDog系统的演进历程
TCA白皮书解读:腾讯内部CodeDog系统的演进历程 【免费下载链接】CodeAnalysis Static Code Analysis - 静态代码分析 项目地址: https://gitcode.com/gh_mirrors/co/CodeAnalysis 腾讯云代码分析(TCA)作为一款强大的静态代码分析工具&…...

八大网盘直链解析工具:高效跨平台文件下载全攻略
八大网盘直链解析工具:高效跨平台文件下载全攻略 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 …...

DLSS Swapper终极指南:一键管理游戏图形增强文件,释放显卡全部性能
DLSS Swapper终极指南:一键管理游戏图形增强文件,释放显卡全部性能 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper DLSS Swapper是一款专为游戏玩家设计的智能图形增强文件管理工具,…...

AI智能体与Stable Diffusion融合:打造对话式文生图应用实战
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫agent-chat-selfie。光看名字,你可能会觉得这又是一个聊天机器人或者AI对话项目,但它的核心其实在于“Selfie”——自拍。这个项目巧妙地结合了当下流行的AI智能体(…...

在Taotoken模型广场根据任务与预算挑选合适模型的实践心得
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Taotoken模型广场根据任务与预算挑选合适模型的实践心得 作为一名日常需要与各类大模型打交道的开发者,模型选型是项…...

循迹小车传感器布局与状态机编程避坑指南:从5路红外到精准过直角弯
循迹小车传感器布局与状态机编程避坑指南:从5路红外到精准过直角弯 在智能小车开发领域,循迹功能是最基础也最具挑战性的环节之一。许多创客和学生在完成硬件搭建后,往往会陷入软件调试的泥潭——小车要么频繁偏离轨道,要么在直角…...

WinFlexBison深度解析:Windows平台编译工具链的完整解决方案
WinFlexBison深度解析:Windows平台编译工具链的完整解决方案 【免费下载链接】winflexbison Main winflexbision repository 项目地址: https://gitcode.com/gh_mirrors/wi/winflexbison 在Windows平台上开发编译器、解释器或复杂文本解析器时,开…...

回溯算法:暴力枚举最优解
一、上期回顾 吃透二分查找三大模板:基础查找、左边界、右边界,掌握二分答案解题思维,有序数组最优解法全部拿下。今天正式攻克回溯算法,暴力枚举最优写法,解决排列、组合、子集、棋盘类所有搜索题。二、递归与回溯核心…...

ThinkPad嵌入式控制器深度解析:TPFanCtrl2散热优化实践方案
ThinkPad嵌入式控制器深度解析:TPFanCtrl2散热优化实践方案 【免费下载链接】TPFanCtrl2 ThinkPad Fan Control 2 (Dual Fan) for Windows 10 and 11 项目地址: https://gitcode.com/gh_mirrors/tp/TPFanCtrl2 在移动工作站领域,ThinkPad以其卓越…...