ROS 编程入门的介绍
2.1 创建 ROS 功能包
ROS(Robot Operating System)是一种开源的机器人软件框架,广泛用于机器人开发中。通过使用 ROS,开发者可以轻松创建和管理机器人应用程序。在本节中,我们将介绍如何创建一个 ROS 功能包并实现一些基本功能。
2.1.1 使用 ROS 主题
ROS 主题(Topic)是一种发布/订阅机制,允许节点之间进行通信。每个节点可以发布主题消息或订阅主题消息来获取数据。以下是如何使用 ROS 主题的步骤:
创建功能包
首先,我们需要创建一个新的 ROS 功能包。在终端中运行以下命令:
catkin_create_pkg de_ws my_robot rospy roscpp
此命令创建一个名为 my_robot 的功能包,并声明了对 std_msgs、rospy 和 roscpp 的依赖。
创建发布者节点
接下来,我们在功能包中创建一个发布者节点。新建一个名为 talker.py 的文件,并添加以下内容:
#!/usr/bin/env pythonimport rospy
from std_msgs.msg import Stringdef talker():pub = rospy.Publisher('chatter', String, queue_size=10)rospy.init_node('talker', anonymous=True)rate = rospy.Rate(10) # 10hzwhile not rospy.is_shutdown():hello_str = "hello world %s" % rospy.get_time()rospy.loginfo(hello_str)pub.publish(hello_str)rate.sleep()if __name__ == '__main__':try:talker()except rospy.ROSInterruptException:pass
此代码定义了一个发布者节点 talker,它每秒钟发布一条 "hello world" 消息到主题 chatter。
2.1.2 创建 ROS 节点
ROS 节点是 ROS 系统中的基本执行单元。每个节点可以执行一个任务,如传感器数据处理、运动控制等。下面我们创建一个订阅者节点来接收 talker 节点发布的消息。
创建订阅者节点
新建一个名为 listener.py 的文件,并添加以下内容:
#!/usr/bin/env pythonimport rospy
from std_msgs.msg import Stringdef callback(data):rospy.loginfo(rospy.get_caller_id() + " I heard %s", data.data)def listener():rospy.init_node('listener', anonymous=True)rospy.Subscriber('chatter', String, callback)rospy.spin()if __name__ == '__main__':listener()
此代码定义了一个订阅者节点 listener,它接收主题 chatter 上的消息并打印出来。
2.1.3 编译节点
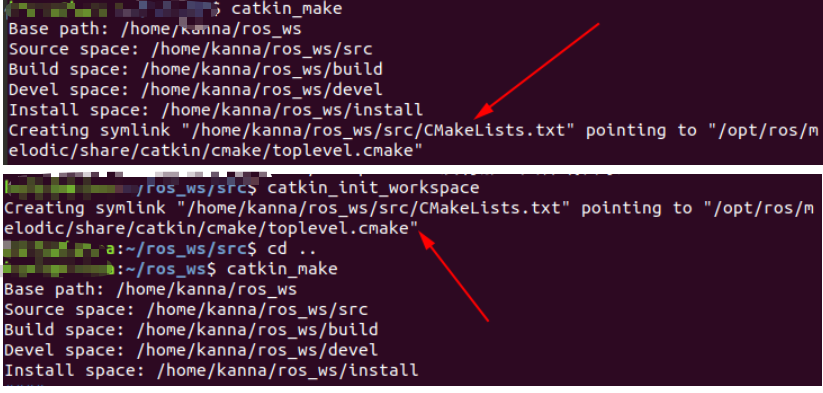
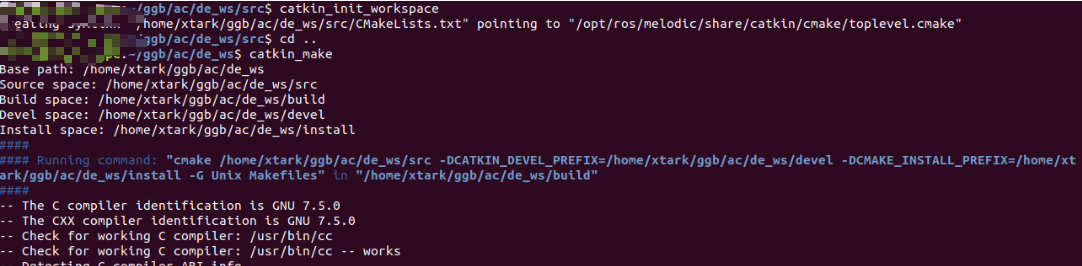
在我们运行节点之前,需要编译功能包。确保在功能包的 CMakeLists.txt 和 package.xml 文件中正确配置了依赖项。然后在终端中运行以下命令:
cd ~/catkin_ws
catkin_make
编译完成后,可以运行节点:
roscore
rosrun my_robot talker.py
rosrun my_robot listener.py
此时,你应该可以看到 listener 节点打印出 talker 节点发布的消息。
添加自定义的 .msg 文件和 .srv 文件
在 ROS 中,自定义消息类型和服务类型是很常见的需求。我们可以定义自己的消息和服务文件来满足特定的应用需求。
创建自定义 .msg 文件
首先,在 my_robot 功能包的 msg 目录下创建一个新的消息文件,例如 CustomMessage.msg:
string content
int32 number
然后,在 CMakeLists.txt 文件中添加以下内容:
add_message_files(FILESCustomMessage.msg
)
在 package.xml 文件中添加依赖:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
最后,重新编译功能包:
catkin_make
创建自定义 .srv 文件
类似地,我们可以在 srv 目录下创建一个新的服务文件,例如 CustomService.srv:
string request
---
string response
然后,在 CMakeLists.txt 文件中添加以下内容:
add_service_files(FILESCustomService.srv
)
在 package.xml 文件中添加依赖:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
重新编译功能包:
catkin_make
2.3 使用 ROS 服务
ROS 服务是一种请求/响应机制,允许节点之间进行同步通信。
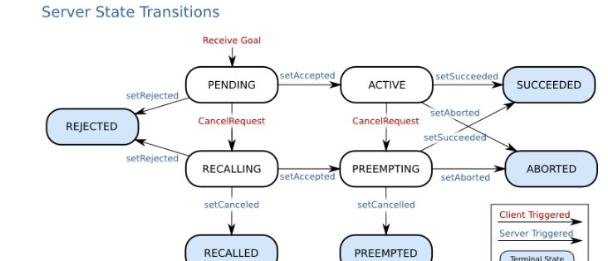
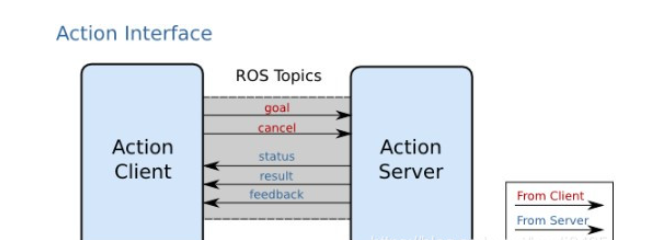
2.3.1 使用 ROS actionlib
actionlib 是 ROS 中用于处理长时间运行任务的库。它提供了一种客户端-服务器架构,允许客户端请求服务器执行某些任务,并在任务完成时收到通知。
创建动作服务器
在 my_robot 功能包中创建一个新的 Python 文件 action_server.py:
#!/usr/bin/env pythonimport rospy
import actionlib
from my_robot.msg import CustomAction, CustomActionFeedback, CustomActionResultclass CustomActionServer(object):_feedback = CustomActionFeedback()_result = CustomActionResult()def __init__(self):self._as = actionlib.SimpleActionServer("custom_action", CustomAction, self.execute_cb, False)self._as.start()def execute_cb(self, goal):rospy.loginfo('Executing goal: %s', goal)success = Truefor i in range(1, goal.order):if self._as.is_preempt_requested():rospy.loginfo('Goal preempted')self._as.set_preempted()success = Falsebreakself._feedback.sequence = iself._as.publish_feedback(self._feedback)rospy.sleep(1.0)if success:self._result.sequence = goal.orderself._as.set_succeeded(self._result)if __name__ == '__main__':rospy.init_node('custom_action_server')server = CustomActionServer()rospy.spin()创建动作客户端在 my_robot 功能包中创建一个新的 Python 文件 action_client.py:#!/usr/bin/env pythonimport rospy
import actionlib
from my_robot.msg import CustomAction, CustomActionGoaldef feedback_cb(feedback):rospy.loginfo('Feedback: %s', feedback)if __name__ == '__main__':rospy.init_node('custom_action_client')client = actionlib.SimpleActionClient('custom_action', CustomAction)client.wait_for_server()goal = CustomActionGoal()goal.order = 10client.send_goal(goal, feedback_cb=feedback_cb)client.wait_for_result()rospy.loginfo('Result: %s', client.get_result())
2.3.2 编译 ROS 动作服务器和客户端
在编译功能包之前,确保在 CMakeLists.txt 和 package.xml 中添加了对 actionlib 和自定义消息的依赖。
然后在终端中运行以下命令:
catkin_make
启动动作服务器和客户端:
rosrun my_robot action_server.py
rosrun my_robot action_client.py
2.4 创建启动文件
启动文件用于同时启动多个 ROS 节点,简化了复杂系统的启动过程。
创建一个新的启动文件 my_robot.launch:
<launch><node pkg="my_robot" type="talker.py" name="talker" output="screen"/><node pkg="my_robot" type="listener.py" name="listener" output="screen"/>
</launch>
运行启动文件:
roslaunch my_robot my_robot.launch
2.5 主题、服务和 actionlib 的应用
在实际应用中,主题、服务和 actionlib 可以结合使用,实现复杂的机器人行为。例如,一个机器人可以通过主题获取传感器数据,通过服务进行路径规划,通过 actionlib 执行长时间的导航任务。
以下是一个综合应用示例:
-
主题用于发布传感器数据。
-
服务用于路径规划。
-
actionlib 用于执行导航任务。
2.6 总结
本文介绍了如何创建 ROS 功能包,并使用主题、服务和 actionlib 实现机器人功能。通过这些基础知识,您可以构建复杂的机器人应用程序。
2.7 问题
在学习和使用 ROS 的过程中,可能会遇到以下问题:
-
功能包无法编译:检查依赖是否正确添加。
-
节点无法通信:确保主题和服务名称一致。
-
动作服务器和客户端无法连接:检查 actionlib 配置是否正确。
相关文章:
ROS 编程入门的介绍
2.1 创建 ROS 功能包 ROS(Robot Operating System)是一种开源的机器人软件框架,广泛用于机器人开发中。通过使用 ROS,开发者可以轻松创建和管理机器人应用程序。在本节中,我们将介绍如何创建一个 ROS 功能包并实现一些…...

第十一章 抽象类与接口
一、抽象类和抽象方法 抽象类:使用abstract修饰的类 抽象方法:在类中没有方法体的方法,称为抽象方法,抽象方法用abstract修饰 抽象类中可以没有抽象方法,包含抽象方法的类必是抽象类 如果子类没有实现父类中的全部…...

请问企业的八大金刚系统是哪些?有什么共同点和区别?
我的理解的八大金刚包括:MES、ERP、WMS、OMS、CRM、SCM、SRM、PLM。 这些系统的主要功能及运用领域是哪些方面?他们互相之前有什么区别?选择时哪些是企业可能根据自身需求选择的必选项目或可选项目? 由于某些系统的必选性取决于企业的具体业…...

【入门】配置 Java 应用程序的完整指南
前言: Java 是一种广泛使用的编程语言,具备跨平台的特性,使得其应用程序可以在多种环境中高效运行。本文将介绍如何将 Java 应用程序从开发环境部署到生产环境,确保其能够稳定、稳定地运行运行。 确定运行环境 Java程序可以运行…...

flutter widget 设置GestureDetector点击无效
有可能是被上层的widget挡住了,虽然你看得到这个widget,但是操作不到。使用相对布局Stack要特别注意,这种布局会和Android一样,先写的布局放在下层,后写的,如果范围较大的话,会盖在之前的widget…...

基于SpringBoot的在线教育平台的设计与实现
文未可获取一份本项目的java源码和数据库参考。 选题的背景与意义: 随着互联网时代信息技术的不断发展,线下已经产生了很多IT技术的培训机构,但是价格却十分昂贵并且需要人们持续不断的去具体培训地点学习,因此更需要一个课程优…...

Django_Vue3_ElementUI_Release_004_使用nginx部署
1. nginx安装配置 1.1 下载nginx Download nginx 1.2 测试一下 1.3 进入nginx用命令操作 2. 部署 2.1 前端部署 2.1.1 修改nginx监听配置 …conf/nginx.conf http {... # 这里不进行修改server {listen 8010; # 监听 80 端口server_name 192.168.10.24; # 输入服务器 ip…...

Java抽象类的案例
抽象类的特点总结 不能实例化:抽象类不能直接创建实例。它只能被继承。即,你不能用 new 关键字创建抽象类的对象。 可以包含抽象方法:抽象类可以包含一个或多个抽象方法(没有方法体),这些方法必须在子类中…...

运维工程师面试整理-数据库
在运维工程师的面试中,数据库管理和优化是一个非常重要的环节。面试官可能会通过数据库相关的问题来评估你在数据库部署、管理、备份、性能优化以及故障排除方面的能力。以下是关于数据库部分的详细内容,帮助你更好地准备面试。 1. 数据库基础 ● 常见数据库类型 ○ 关系型数…...
comfyui一键抠图工作流:让你告别PS!
前言 本文涉及的工作流和插件,需要的朋友请扫描免费获取哦~ 在当今的数字时代,图像处理已经成为许多行业的日常需求。无论是电商产品展示、广告设计,还是个人照片编辑,去除背景都是一个常见且重要的步骤。 然而,使用…...

【Hot100】LeetCode—4. 寻找两个正序数组的中位数
目录 1- 思路题目识别二分 2- 实现⭐4. 寻找两个正序数组的中位数——题解思路 3- ACM 实现 原题链接:4. 寻找两个正序数组的中位数 1- 思路 题目识别 识别1 :给定两个数组 nums1 和 nums2 ,找出数组的中位数 二分 思路 将寻找中位数 —…...
【LLM text2sql】浅看大模型用于text2sql的综述
前言 之前笔者分享了text2sql & LLM & KG的有机结合实现KBQA的问答, 《【LLM & RAG & text2sql】大模型在知识图谱问答上的核心算法详细思路及实践》、 《【开源分享】KBQA核心技术及结合大模型SPARQL查询生成问答实践》。 我们再来看看大模型在te…...
Node js介绍
目录 概要**对Node的认识****Node的概念理解****Node和浏览器区别****Node的架构图** **Node的应用场景****Node的安装****安装Node的LTS版本****Node的版本管理工具nvm(了解)** **Node的输入和输出**Node程序传递参数Node的输出 **Node的全局对象****特殊的全局对象****其他的…...

企业编辑抖音百科词条有什么用?
企业编辑抖音百科词条有什么用? 百科词条创建对企业,品牌以及个人的重要性!#百科词条创建#百科营销#百科词条费用# 企业编辑百科词条主要是有以下这些好处,首先是丰富企业在网络上的信息,提高企业的知名度。 百科词条…...

数据结构-链式二叉树-四种遍历
博客主页:【夜泉_ly】 本文专栏:【数据结构】 欢迎点赞👍收藏⭐关注❤️ 数据结构-链式二叉树-四种遍历 1.前言2.前、中、后序遍历2.1前序遍历2.1中、后序遍历 3.层序遍历3.1递归实现3.2队列实现关于在Pop之后为什么还能用tmp访问节点&#x…...

【YashanDB知识库】数据库获取时间和服务器时间不一致
本文转自YashanDB官网,具体内容可见数据库获取时间和服务器时间不一致 【问题分类】功能使用 【关键字】服务器时间、数据库时间 【问题描述】数据库获取的时间和服务器时间不一致。 【问题原因分析】YashanDB并没有时区的概念,数据库的时间以数据库启…...

十大排序之:冒泡排序
目录 一、简介 实现过程 时间复杂度 二、代码实现 函数声明 Swap函数 单趟 多趟 测试 优化 一、简介 冒泡排序是一种简单的排序算法,它重复地比较相邻的两个元素,如果顺序错误就交换它们,直到没有元素需要交换为止。这个过程类…...

【MPC】无人机模型预测控制复现Data-Driven MPC for Quadrotors项目(Part 1)
无人机模型预测控制复现Data-Driven MPC for Quadrotors项目 参考链接背景和问题方法与贡献实验结果安装ROS创建工作空间下载RotorS仿真器源码和依赖创建Python虚拟环境下载data_driven_mpc仓库代码下载并配置ACADO求解器下载并配置ACADO求解器的Python接口下载并配置rpg_quadr…...

微信小程序开发——比较两个数字大小
在这里我们使用的工具是 需要自行安装和配置。 在微信小程序中比较两个数字大小有以下几种方式: 一、普通条件判断 在小程序的.js 文件中,先定义两个数字,如let num1 5; let num2 3;。通过if - else if - else语句,根据num1与…...

Java多线程3
1.有序性在并发编程中的含义。 有序性在并发编程中指的是在多线程环境下,程序的执行顺序应与单线程情况下保持一致,以避免出现不确定或错误的执行结果。 2.为何需要使用多线程进行程序设计? 使用多线程可以提高程序的效率,利用…...
)
Veo 2提示词效能跃迁实战(工业级Prompt链构建全图谱)
更多请点击: https://codechina.net 第一章:Veo 2提示词编写的核心范式演进 Veo 2作为新一代视频生成模型,其提示词(prompt)工程已从早期的“关键词堆叠”转向结构化、语义分层与意图对齐的复合范式。这一演进并非简…...

深度学习从心电信号中解码呼吸频率:原理、实现与临床价值
1. 项目概述:从心电信号中“听”到呼吸声呼吸频率,这个我们每分钟都在进行却很少被精确量化的生命体征,在临床医学中扮演着至关重要的角色。它不仅是评估呼吸系统功能的直接指标,更是反映全身代谢、循环乃至神经系统状态的“窗口”…...

告别FTP龟速:用NTFS-3G在CentOS7上直连移动硬盘拷贝200G大文件
告别FTP龟速:用NTFS-3G在CentOS7上直连移动硬盘拷贝200G大文件当面对数百GB的设计素材、日志文件或数据库备份需要迁移时,传统的FTP传输往往会成为效率瓶颈。我曾在一个视频处理项目中,需要将230GB的4K原始素材从移动硬盘导入服务器ÿ…...

量子纠错码VarQEC:原理、实现与硬件优化
1. 量子纠错码基础与实验背景量子纠错码(Quantum Error Correction Codes, QEC)是量子计算中保护量子信息免受噪声影响的核心技术。与经典纠错码不同,量子纠错需要应对量子态特有的退相干和纠缠特性。传统QEC如[[5,1,3]]完美码虽然理论完备&a…...

正视孩童情绪波动,耐心陪伴平稳疏导
孩子的情绪就像夏天的天气,前一秒还晴空万里,后一秒可能就乌云密布。面对突如其来的哭闹、发脾气或者闷闷不乐,很多家长会急着“灭火”——要么讲道理,要么直接制止。但其实,情绪波动本身不是问题,它是孩子…...
)
告别KITTI!用TartanAir数据集在Unreal Engine仿真环境里“虐”你的VSLAM算法(附保姆级下载与使用指南)
用TartanAir数据集在Unreal Engine中打造VSLAM算法的"极限考场"当你的视觉SLAM算法在KITTI数据集上跑出98%的准确率时,是否意味着它已经准备好应对真实世界的复杂场景?现实往往会给乐观的开发者当头一棒——实验室里的"优等生"在遇到…...

服务器数据下载安全:实时加密与动态访问控制实战
1. 这不是又一个“加个密码”的方案,而是服务器数据流动的实时安检闸机IP-guard安全网关——这个名字在企业IT运维圈里,常被误读为“桌面端U盘管控工具”或“员工上网行为审计系统”。但真正用过它来守服务器的人,会立刻意识到:它…...

Mysql?基础语法!!!
作为程序员、数据分析从业者,甚至是产品运营,SQL都是必须掌握的核心技能。不管是后端开发对数据库增删改查,还是数据分析提取业务数据,本质都是在写SQL语句。很多新手觉得SQL难,其实是没有理清逻辑。SQL的核心逻辑非常…...

D3KeyHelper终极指南:5分钟掌握暗黑3最强自动化工具
D3KeyHelper终极指南:5分钟掌握暗黑3最强自动化工具 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper D3KeyHelper是一款专为《暗黑破坏神3…...
)
【独家首发】DeepSeek官方未公开的集成测试Checklist(含23项生产环境准入阈值与压测基线)
更多请点击: https://codechina.net 第一章:DeepSeek集成测试方案 DeepSeek模型的集成测试需覆盖推理服务稳定性、多模态输入兼容性、上下文长度边界及API协议一致性四大核心维度。测试环境基于Kubernetes集群部署,采用PrometheusGrafana监控…...