【超详细】基于YOLOv8训练无人机视角Visdrone2019数据集
主要内容如下:
1、Visdrone2019数据集介绍
2、下载、制作YOLO格式训练集
3、模型训练及预测
4、Onnxruntime推理
运行环境:Python=3.8(要求>=3.8),torch1.12.0+cu113(要求>=1.8),onnxruntime-gpu==1.12.0
原始数据集百度AI stduio下载链接:https://aistudio.baidu.com/datasetdetail/115729
Visdrone-YOLO格式数据集下载链接:https://aistudio.baidu.com/datasetdetail/295374
训练资源占用:bacth=16,workers=8,yolov8s显存需16G,bacth=8的话8G够用,RTX4080大约1min一个epoch。
往期内容:
【超详细】跑通YOLOv8之深度学习环境配置1-Anaconda安装
【超详细】跑通YOLOv8之深度学习环境配置2-CUDA安装
【超详细】跑通YOLOv8之深度学习环境配置3-YOLOv8安装
【超详细】基于YOLOv8的PCB缺陷检测
【超详细】基于YOLOv8改进1-Drone-YOLO复现
1 数据集介绍
1.1 简介
VisDrone数据集是由天津大学等团队开源的一个大型无人机视角的数据集,官方提供的数据中训练集是6471、验证集是548、测试集1610张。数据集共提供了以下12个类,分别是:‘忽略区域’, ‘pedestrian’, ‘people’, ‘bicycle’, ‘car’, ‘van’,‘truck’, ‘tricycle’, ‘awning-tricycle’, ‘bus’, ‘motor’, ‘others’,其中忽略区域、others是非有效目标区域,本项目中予以忽略;
1.2 示例

1.3 标签格式

**标签含义:**
1. 边界框左上角的x坐标
2. 边界框左上角的y坐标
3. 边界框的宽度
4. 边界框的高度
5. GROUNDTRUTH文件中的分数设置为1或0。1表示在计算中考虑边界框,而0表示将忽略边界框。
6. 类别:忽略区域(0)、行人(1)、人(2)、自行车(3)、汽车(4)、面包车(5)、卡车(6)、三轮车(7)、雨篷三轮车(8)、公共汽车(9)、摩托车(10),其他(11)。
7. GROUNDTRUTH文件中的得分表示对象部分出现在帧外的程度(即,无截断=0(截断比率0%),部分截断=1(截断比率1%°´50%))。
8. GROUNDTRUTH文件中的分数表示被遮挡的对象的分数(即,无遮挡=0(遮挡比率0%),部分遮挡=1(遮挡比率1%°´50%),重度遮挡=2(遮挡率50%~100%))。
2 下载和制作YOLO格式数据集
2.1 下载原始数据集
百度AI stduio下载链接:https://aistudio.baidu.com/datasetdetail/115729
注意:可直接下载已完成转换的YOLO格式数据进行训练,可跳过该阶段,直接训练!链接为:https://aistudio.baidu.com/datasetdetail/295374

下载解压:

注意:由于格式不是YOLO直接可以训练的格式,所以需进行转换!!!
2.2 制作YOLO格式数据集
(1)新建visdrone2yolo.py脚本,脚本内容如下:
(2)修改路径参数–dir_path的值,即自己下载路径;
(2)结果会在原始每个文件夹下生成一个label文件夹,即YOLO格式标签;
import os
from pathlib import Path
import argparsedef visdrone2yolo(dir):from PIL import Imagefrom tqdm import tqdmdef convert_box(size, box):# Convert VisDrone box to YOLO xywh boxdw = 1. / size[0]dh = 1. / size[1]return (box[0] + box[2] / 2) * dw, (box[1] + box[3] / 2) * dh, box[2] * dw, box[3] * dh(dir / 'labels').mkdir(parents=True, exist_ok=True) # make labels directorypbar = tqdm((dir / 'annotations').glob('*.txt'), desc=f'Converting {dir}')for f in pbar:img_size = Image.open((dir / 'images' / f.name).with_suffix('.jpg')).sizelines = []with open(f, 'r') as file: # read annotation.txtfor row in [x.split(',') for x in file.read().strip().splitlines()]:if row[4] == '0': # VisDrone 'ignored regions' class 0continuecls = int(row[5]) - 1 # 类别号-1box = convert_box(img_size, tuple(map(int, row[:4])))lines.append(f"{cls} {' '.join(f'{x:.6f}' for x in box)}\n")with open(str(f).replace(os.sep + 'annotations' + os.sep, os.sep + 'labels' + os.sep), 'w') as fl:fl.writelines(lines) # write label.txtif __name__ == '__main__':# Create an argument parser to handle command-line argumentsparser = argparse.ArgumentParser()parser.add_argument('--dir_path', type=str, default=r'E:\datasets\visdrone2019', help='visdrone数据集路径')args = parser.parse_args()dir = Path(args.dir_path)# Convertfor d in 'VisDrone2019-DET-train', 'VisDrone2019-DET-val', 'VisDrone2019-DET-test-dev':visdrone2yolo(dir / d) # convert VisDrone annotations to YOLO labels3 模型训练及预测
3.1 模型训练
3.1.1 修改数据集配置文件
文件路径:ultralytics-main\ultralytics\cfg\datasets\VisDrone.yaml

3.1.2 创建模型训练脚本
(1)训练方式1-脚本训练
在ultralytics-main目录新建一个train.py脚本,内容如下:
注意:如爆显存,降低batch大小!!!
【如下配置显存需16G,bacth=8的话8G够用,RTX4080大约1min一个epoch】
from ultralytics import YOLOif __name__ == '__main__':# Load a model# model = YOLO("yolov8n.yaml") # build a new model from scratchmodel = YOLO("yolov8s.pt") # load a pretrained model (recommended for training)# Use the modelmodel.train(data="VisDrone.yaml", imgsz=640, batch=16, workers=8, cache=True, epochs=100) # train the modelmetrics = model.val() # evaluate model performance on the validation set# results = model("ultralytics\\assets\\bus.jpg") # predict on an imagepath = model.export(format="onnx", opset=13) # export the model to ONNX format
(2)训练方式2-终端命令行
cd ../ultralytics-main
yolo task=detect mode=train model=yolov8s.pt data=ultralytics/cfg/datasets/VisDrone.yaml batch=16 epochs=100 imgsz=640 workers=8 cache=True device=0
3.1.3 数据分布情况可视化
特点:类别不均衡、小目标较多(640*640输入精度不会太高,可提高输入分辨率,如1280、1536等)。

3.1.4 训练结果可视化
训练100epoch结果如下,增加epoch还能提升。

3.2 模型预测
在ultralytics-main目录新建一个predict.py脚本,内容如下:
from ultralytics import YOLOif __name__ == '__main__':# Load a modelmodel = YOLO(r"E:\Code\ultralytics-main\runs\detect\train\weights\best.pt") # load modelmodel.predict(source=r"E:\datasets\visdrone2019\VisDrone2019-DET-test-dev\images\0000006_01111_d_0000003.jpg", save=True, save_conf=True, save_txt=True, name='output')结果如下:

4 Onnxruntime推理
在ultralytics-main目录新建一个onnx_infer.py脚本,内容如下:
注意:如导出动态onnx,model.export(format=“onnx”, opset=13, dynamic=True)
import argparse
import time
import cv2
import numpy as npimport onnxruntime as ort # 使用onnxruntime推理用上,pip install onnxruntime-gpu==1.12.0 -i https://pypi.tuna.tsinghua.edu.cn/simple,默认安装CPU
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '0'class YOLOv8:"""YOLOv8 object detection model class for handling inference and visualization."""def __init__(self, onnx_model, imgsz=(640, 640)):"""Initialization.Args:onnx_model (str): Path to the ONNX model."""# 构建onnxruntime推理引擎self.ort_session = ort.InferenceSession(onnx_model,providers=['CUDAExecutionProvider', 'CPUExecutionProvider']if ort.get_device() == 'GPU' else ['CPUExecutionProvider'])print(ort.get_device())# Numpy dtype: support both FP32 and FP16 onnx modelself.ndtype = np.half if self.ort_session.get_inputs()[0].type == 'tensor(float16)' else np.singleself.model_height, self.model_width = imgsz[0], imgsz[1] # 图像resize大小def __call__(self, im0, conf_threshold=0.4, iou_threshold=0.45):"""The whole pipeline: pre-process -> inference -> post-process.Args:im0 (Numpy.ndarray): original input image.conf_threshold (float): confidence threshold for filtering predictions.iou_threshold (float): iou threshold for NMS.Returns:boxes (List): list of bounding boxes."""# 前处理Pre-processt1 = time.time()im, ratio, (pad_w, pad_h) = self.preprocess(im0)pre_time = round(time.time() - t1, 3)# print('det预处理时间:{:.3f}s'.format(time.time() - t1))# 推理 inferencet2 = time.time()preds = self.ort_session.run(None, {self.ort_session.get_inputs()[0].name: im})[0]# print('det推理时间:{:.2f}s'.format(time.time() - t2))det_time = round(time.time() - t2, 3)# 后处理Post-processt3 = time.time()boxes = self.postprocess(preds,im0=im0,ratio=ratio,pad_w=pad_w,pad_h=pad_h,conf_threshold=conf_threshold,iou_threshold=iou_threshold,)# print('det后处理时间:{:.3f}s'.format(time.time() - t3))post_time = round(time.time() - t3, 3)return boxes, (pre_time, det_time, post_time)# 前处理,包括:resize, pad, HWC to CHW,BGR to RGB,归一化,增加维度CHW -> BCHWdef preprocess(self, img):"""Pre-processes the input image.Args:img (Numpy.ndarray): image about to be processed.Returns:img_process (Numpy.ndarray): image preprocessed for inference.ratio (tuple): width, height ratios in letterbox.pad_w (float): width padding in letterbox.pad_h (float): height padding in letterbox."""# Resize and pad input image using letterbox() (Borrowed from Ultralytics)shape = img.shape[:2] # original image shapenew_shape = (self.model_height, self.model_width)r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])ratio = r, rnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))pad_w, pad_h = (new_shape[1] - new_unpad[0]) / 2, (new_shape[0] - new_unpad[1]) / 2 # wh paddingif shape[::-1] != new_unpad: # resizeimg = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(pad_h - 0.1)), int(round(pad_h + 0.1))left, right = int(round(pad_w - 0.1)), int(round(pad_w + 0.1))img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=(114, 114, 114)) # 填充# Transforms: HWC to CHW -> BGR to RGB -> div(255) -> contiguous -> add axis(optional)img = np.ascontiguousarray(np.einsum('HWC->CHW', img)[::-1], dtype=self.ndtype) / 255.0img_process = img[None] if len(img.shape) == 3 else imgreturn img_process, ratio, (pad_w, pad_h)# 后处理,包括:阈值过滤与NMSdef postprocess(self, preds, im0, ratio, pad_w, pad_h, conf_threshold, iou_threshold):"""Post-process the prediction.Args:preds (Numpy.ndarray): predictions come from ort.session.run().im0 (Numpy.ndarray): [h, w, c] original input image.ratio (tuple): width, height ratios in letterbox.pad_w (float): width padding in letterbox.pad_h (float): height padding in letterbox.conf_threshold (float): conf threshold.iou_threshold (float): iou threshold.Returns:boxes (List): list of bounding boxes."""x = preds # outputs: predictions (1, 84, 8400)# Transpose the first output: (Batch_size, xywh_conf_cls, Num_anchors) -> (Batch_size, Num_anchors, xywh_conf_cls)x = np.einsum('bcn->bnc', x) # (1, 8400, 84)# Predictions filtering by conf-thresholdx = x[np.amax(x[..., 4:], axis=-1) > conf_threshold]# Create a new matrix which merge these(box, score, cls) into one# For more details about `numpy.c_()`: https://numpy.org/doc/1.26/reference/generated/numpy.c_.htmlx = np.c_[x[..., :4], np.amax(x[..., 4:], axis=-1), np.argmax(x[..., 4:], axis=-1)]# NMS filtering# 经过NMS后的值, np.array([[x, y, w, h, conf, cls], ...]), shape=(-1, 4 + 1 + 1)x = x[cv2.dnn.NMSBoxes(x[:, :4], x[:, 4], conf_threshold, iou_threshold)]# 重新缩放边界框,为画图做准备if len(x) > 0:# Bounding boxes format change: cxcywh -> xyxyx[..., [0, 1]] -= x[..., [2, 3]] / 2x[..., [2, 3]] += x[..., [0, 1]]# Rescales bounding boxes from model shape(model_height, model_width) to the shape of original imagex[..., :4] -= [pad_w, pad_h, pad_w, pad_h]x[..., :4] /= min(ratio)# Bounding boxes boundary clampx[..., [0, 2]] = x[:, [0, 2]].clip(0, im0.shape[1])x[..., [1, 3]] = x[:, [1, 3]].clip(0, im0.shape[0])return x[..., :6] # boxeselse:return []if __name__ == '__main__':# Create an argument parser to handle command-line argumentsparser = argparse.ArgumentParser()parser.add_argument('--det_model', type=str, default=r"E:\Code\ultralytics-main\runs\detect\train\weights\best.onnx", help='Path to ONNX model')parser.add_argument('--source', type=str, default=str(r'E:\datasets\visdrone2019\VisDrone2019-DET-test-dev\images'), help='Path to input image')parser.add_argument('--out_path', type=str, default=str(r'E:\Code\ultralytics-main\runs/res'), help='结果保存文件夹')parser.add_argument('--imgsz_det', type=tuple, default=(640, 640), help='Image input size')parser.add_argument('--classes', type=list, default=['pedestrian', 'people', 'bicycle', 'car', 'van', 'truck', 'tricycle', 'awning-tricycle', 'bus', 'motor'], help='类别')parser.add_argument('--conf', type=float, default=0.25, help='Confidence threshold')parser.add_argument('--iou', type=float, default=0.6, help='NMS IoU threshold')args = parser.parse_args()if not os.path.exists(args.out_path):os.mkdir(args.out_path)print('开始运行:')# Build modeldet_model = YOLOv8(args.det_model, args.imgsz_det)color_palette = np.random.uniform(0, 255, size=(len(args.classes), 3)) # 为每个类别生成调色板for i, img_name in enumerate(os.listdir(args.source)):try:t1 = time.time()# Read image by OpenCVimg = cv2.imread(os.path.join(args.source, img_name))# 检测Inferenceboxes, (pre_time, det_time, post_time) = det_model(img, conf_threshold=args.conf, iou_threshold=args.iou)print('{}/{} ==>总耗时间: {:.3f}s, 其中, 预处理: {:.3f}s, 推理: {:.3f}s, 后处理: {:.3f}s, 识别{}个目标'.format(i+1, len(os.listdir(args.source)), time.time() - t1, pre_time, det_time, post_time, len(boxes)))for (*box, conf, cls_) in boxes:cv2.rectangle(img, (int(box[0]), int(box[1])), (int(box[2]), int(box[3])),color_palette[int(cls_)], 2, cv2.LINE_AA)cv2.putText(img, f'{args.classes[int(cls_)]}: {conf:.3f}', (int(box[0]), int(box[1] - 9)),cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2, cv2.LINE_AA)cv2.imwrite(os.path.join(args.out_path, img_name), img)except Exception as e:print(e)
资源占用:显存不到2G,RTX4080推理耗时20几毫秒。

结果可视化如下:

相关文章:
【超详细】基于YOLOv8训练无人机视角Visdrone2019数据集
主要内容如下: 1、Visdrone2019数据集介绍 2、下载、制作YOLO格式训练集 3、模型训练及预测 4、Onnxruntime推理 运行环境:Python3.8(要求>3.8),torch1.12.0cu113(要求>1.8),…...

VUE项目在Linux子系统部署
1、导读 环境:Windows 11、python 3.12.3、Django 4.2.11、 APScheduler 3.10.4 vue 背景:换系统需要重新安装,避免后期忘记,此处记录一下啊 事件:20240922 说明:使用node启动,非nginx&…...
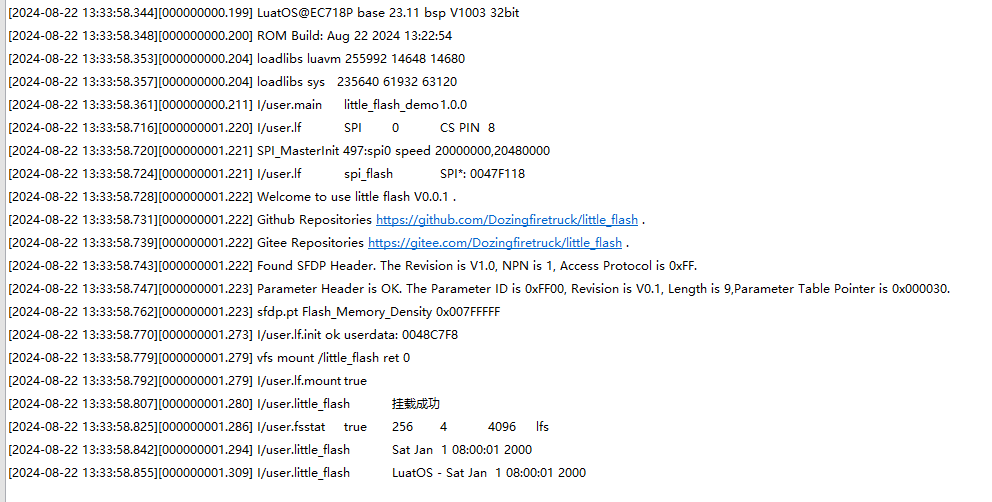
开源 | 如何在产品上扩展大储存?合宙LuatOS外挂SPI Flash库轻松搞定
我们都知道芯片的储存都是寸土寸金的,当你的产品需要存储照片、音频、文档等资源的时候,有没有眉头一紧?内部不够只能外扩,但是外扩要编写各种驱动,还有Flash替换,这都要消耗头发啊! 但&#x…...

20 基于STM32的温度、电流、电压检测proteus仿真系统(OLED、DHT11、继电器、电机)
目录 一、主要功能 二、硬件资源 三、程序编程 四、实现现象 一、主要功能 基于STM32F103C8T6 采用DHT11读取温度、滑动变阻器模拟读取电流、电压。 通过OLED屏幕显示,设置电流阈值为80,电流小阈值为50,电压阈值为60,温度阈值…...

spring自定义属性编辑器
文章目录 spring自定义属性编辑器步骤 spring自定义属性编辑器 属性编辑器是用来解析bean的配置文件中的属性标签的,spring的BeanWrapperImpl默认会注册CustomCollectionEditor(集合)、CustomMapEditor(Map)、CurrencyEditor(货币)、ByteArrayPropertyEditor等&…...

在VMware16中安装Windows 10:完整教程
在VMware中安装Windows 10:完整教程 1.安装环境准备2.创建虚拟机 1.安装环境准备 1.虚拟机: VMware-workstation-full-16.2.2-19200509 2.系统镜像:win10 2.创建虚拟机 1.自定义 2.下一步 3.稍后安装系统 3.默认下一步 4.虚拟机取名和选择存放路径(按需更改…...

MATLAB系列09:图形句柄
MATLAB系列09:图形句柄 9. 图形句柄9.1 MATLAB图形系统9.2 对象句柄9.3 对象属性的检测和更改9.3.1 在创建对象时改变对象的属性9.3.2 对象创建后改变对象的属性 9.4 用 set 函数列出可能属性值9.5 自定义数据9.6 对象查找9.7 用鼠标选择对象9.8 位置和单位9.8.1 图…...

把设计模式用起来!(4) 用不好模式?之原理不明
(清华大学出版社 《把设计模式用起来》书稿试读) 上一篇:把设计模式用起来!(3)用不好模式?之时机不对 为什么用不好设计模式?——原理不明 难搞的顾客:“抹这种霜&#…...

安卓13去掉下拉菜单的Dump SysUI 堆的选项 android13删除Dump SysUI 堆
总纲 android13 rom 开发总纲说明 文章目录 1.前言2.问题分析3.代码分析3.1 位置13.2 位置24.代码修改5.编译6.彩蛋1.前言 客户需要去掉下拉菜单里面的Dump SysUI 堆图标,不让使用这个功能。 2.问题分析 android的下拉菜单在systemui里面,这里我们只需要定位到对应的添加代…...

vue3常用的组件间通信
一 props props 可以实现父子组件通信,props数据是只读。 1. 基本用法 在父组件中,你可以这样传递 props: <template><ChildComponent message"Hello, Vue 3!" /> </template><script setup> import C…...

Windows 查找特定进程的ID并杀死
"*分析用户信息.py*" 换为自己的文件名 Get-WmiObject Win32_Process | Where-Object { $_.CommandLine -like "*分析用户信息.py*" } 查找后 内容如下 __GENUS : 2 __CLASS : Win32_Process __SUPERCLASS …...

Snapchat API 访问:Objective-C 实现示例
Snapchat 是一个流行的社交媒体平台,它允许用户发送和接收短暂存在的图片和视频。对于开发者来说,访问 Snapchat API 可以为应用程序添加独特的社交功能。本文将介绍如何在 Objective-C 中实现对 Snapchat API 的访问,并提供一个详细的代码示…...

ps证件照蓝底换白底
ps证件照蓝底换白底 1、打开 Photoshop,导入需要处理的照片。 2、左侧工具栏中选择“魔棒工具”,点击证件照的背景区域进行选择。 3、使用快捷键 Shift F5 或者从顶部菜单选择“编辑” -> “填充”,在弹出的对话框中选择“填充内容”中…...

阿里云kafka消息写入topic失败
1. 问题现象描述 20240918,14:22,测试反馈说kafka有问题,生产者写入消息的时候报错,并发了一张日志截图,主要报错如下: to topic xxxx: org.apache.kafka.common.errors.TimeoutException: Expiring 1 record(s) for x…...

图像放大效果示例【JavaScript】
实现效果: 当鼠标悬停在小图(缩略图)上时,大图(预览图)会随之更新为相应的小图,并高亮当前悬浮的小图的父元素。 代码: 1. HTML部分 <!DOCTYPE html> <html lang"z…...

【C#生态园】云端之C#:全面解析6种云服务提供商的SDK
C#开发者必读:深度比较6种云服务SDK 前言 随着云计算技术的迅猛发展,越来越多的企业和开发者选择将应用程序部署到公共云平台上。针对C#开发者而言,各大云服务提供商纷纷推出了适用于C#的SDK,以便开发者能够更轻松地与其云服务进…...

远程升级又双叒叕失败?背后原因竟然是。。。
最近又遇到了远程升级接连失败的情况,耐心和信心都备受折磨! 事情是这样的:有客户反馈在乡村里频繁出现掉线的情况,不敢耽搁,赶紧联系小伙伴排查测试,最后发现,只有去年某一批模块在当下环境才…...

【测试】——Selenium API (万字详解)
📖 前言:本文详细介绍了如何利用Selenium进行Web自动化测试,包括定位元素(如cssSelector和xpath)、常用操作函数(如点击、输入等)、窗口管理、键盘鼠标事件和浏览器导航,以及处理弹窗…...
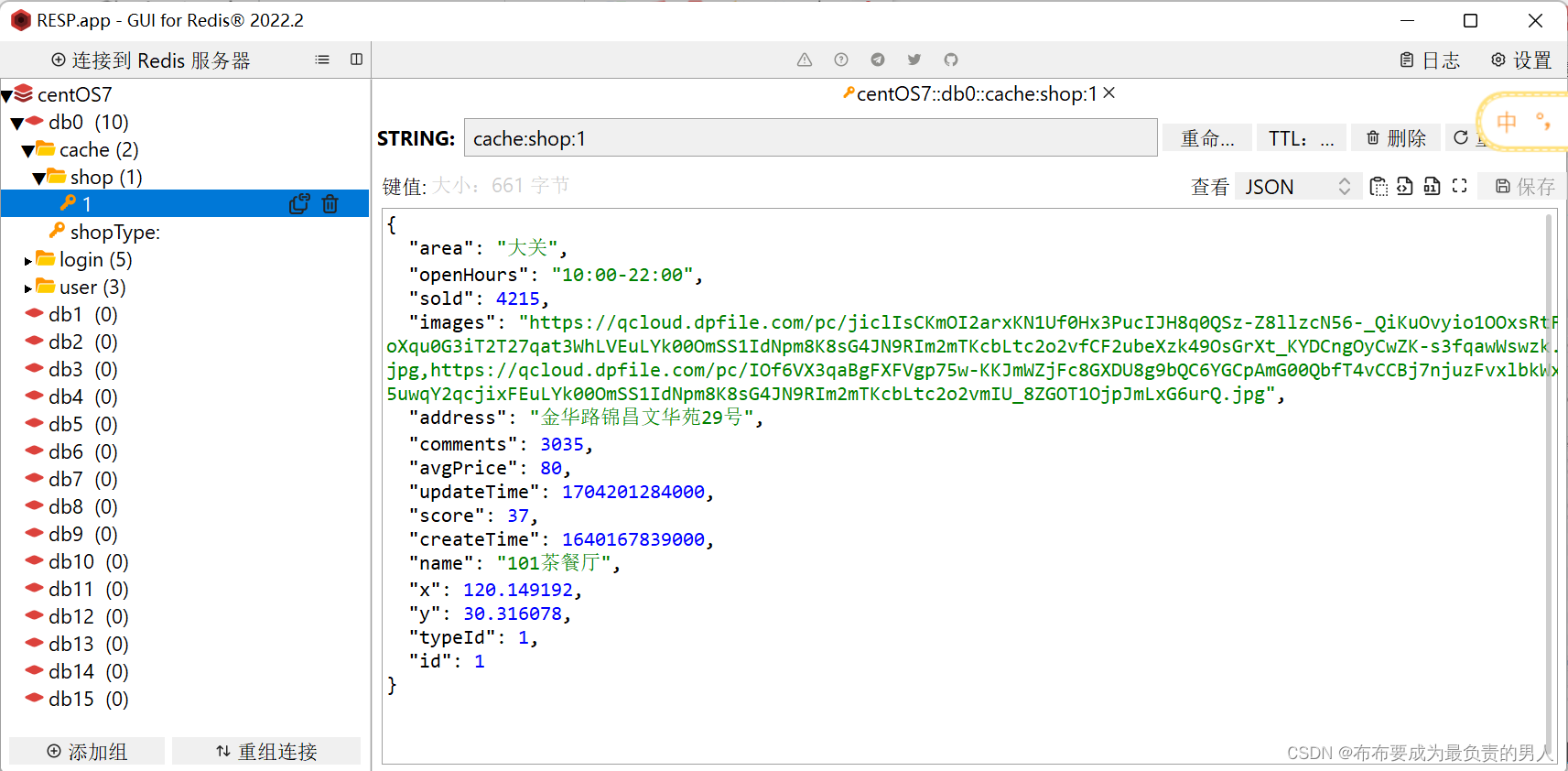
Redis:原理+项目实战——Redis实战3(Redis缓存最佳实践(问题解析+高级实现))
👨🎓作者简介:一位大四、研0学生,正在努力准备大四暑假的实习 🌌上期文章:Redis:原理项目实战——Redis实战2(Redis实现短信登录(原理剖析代码优化)&#x…...

刚刚,Stable Diffusion 2024升级,最强Ai绘画整合包、部署教程(解压即用)
2024Ai技术大爆发的元年 目前两款Ai神器大火 一款是大名鼎鼎的Chat GPT 另外一款—Stable Diffusion 堪称全球最强Ai绘画工具 Stable Diffusion Ai绘画2024版本更新啦! 从4.8.7更新至**4.9版本!**更新优化和大模型增加,无需安装…...

终极指南:使用OpenHTMLtoPDF快速构建专业PDF生成器
终极指南:使用OpenHTMLtoPDF快速构建专业PDF生成器 【免费下载链接】openhtmltopdf An HTML to PDF library for the JVM. Based on Flying Saucer and Apache PDF-BOX 2. With SVG image support. Now also with accessible PDF support (WCAG, Section 508, PDF/U…...

深度解析猫抓Cat-Catch:从浏览器资源嗅探到流媒体处理的技术架构演进
深度解析猫抓Cat-Catch:从浏览器资源嗅探到流媒体处理的技术架构演进 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 猫抓Cat-Catch作为…...

戴尔G15散热控制终极指南:免费开源工具TCC-G15告别过热降频
戴尔G15散热控制终极指南:免费开源工具TCC-G15告别过热降频 【免费下载链接】tcc-g15 Thermal Control Center for Dell G15 - open source alternative to AWCC 项目地址: https://gitcode.com/gh_mirrors/tc/tcc-g15 你是否为戴尔G15笔记本在游戏或高强度工…...
)
Keil5编译报错‘Target not created’?别急着重装,先试试这几招(附常见原因排查清单)
Keil5编译报错‘Target not created’的深度排查指南 当Keil5编译时出现"Target not created"的提示,很多开发者第一反应是重装软件。但实际上,这个报错背后可能隐藏着多种原因,盲目重装不仅浪费时间,还可能掩盖真正的问…...

终极指南:如何在Android设备上离线使用Zwift骑行模拟平台
终极指南:如何在Android设备上离线使用Zwift骑行模拟平台 【免费下载链接】zwift-offline Use Zwift offline 项目地址: https://gitcode.com/gh_mirrors/zw/zwift-offline 你是否曾梦想在无需网络连接的情况下享受专业的Zwift虚拟骑行体验?现在&…...

9 款 AI 毕业论文工具硬核横评:okbiye 领衔,解锁高效合规写作新路径
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的本科论文写作,向来是耗时耗力的 “攻坚战”。选题迷茫、大纲混乱、格式反复出错、查重屡屡超标、AI 痕迹过重难通过检测…...

【为风光储一体化系统注入精准“心跳”的隐形力量】
在“双碳”战略目标的宏伟蓝图下,构建以新能源为主体的新型电力系统已成为时代命题。风光储一体化,作为平滑新能源波动、提升电网消纳能力的关键路径,正迎来前所未有的发展机遇。在这一变革性的能源体系中,每一处精密的控制与高效…...
)
告别手动!用Windows批处理脚本批量重命名MKV音轨(MkvToolnix v73实战)
告别手动!用Windows批处理脚本批量重命名MKV音轨(MkvToolnix v73实战) 每次整理下载的剧集资源时,最让人头疼的莫过于音轨信息错乱——明明视频是国语配音,音轨标签却显示为日语。手动修改不仅效率低下,还容…...

剪映自动化终极指南:用Python代码解放你的视频创作时间
剪映自动化终极指南:用Python代码解放你的视频创作时间 【免费下载链接】JianYingApi Third Party JianYing Api. 第三方剪映Api 项目地址: https://gitcode.com/gh_mirrors/ji/JianYingApi 还在为重复的视频剪辑工作烦恼吗?每天花几个小时在剪映…...

线下技术沙龙:AI Coding深度实践LLM应用分享
活动简介 我们正在经历一场软件开发 范式的变革。从Copilot的智能补全,到Cursor的对话式编程,再到Agent自主完成复杂任务——代码的编写方式,正在被重新定义。 但这场变革的核心,不是工具本身,而是使用工具的人。 本…...