基于单片机巡迹避障智能小车系统
文章目录
- 前言
- 资料获取
- 设计介绍
- 设计程序
- 具体实现截图
- 设计获取
前言
💗博主介绍:✌全网粉丝10W+,CSDN特邀作者、博客专家、CSDN新星计划导师,一名热衷于单片机技术探索与分享的博主、专注于 精通51/STM32/MSP430/AVR等单片机设计 主要对象是咱们电子相关专业的大学生,希望您们都共创辉煌!✌💗
👇🏻 精彩专栏 推荐订阅👇🏻
单片机设计精品实战案例✅
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
资料获取
文章底部名片,详细资料联系我。
设计介绍
基于单片机巡迹避障智能小车系统是一个集成了单片机控制、传感器检测、路径识别和避障策略于一体的智能系统。以下是对该系统的详细介绍:
一、系统组成
-
核心控制器
单片机作为整个系统的核心控制器,负责接收传感器数据、执行控制算法,并输出控制指令。常用的单片机型号包括STC89C52、Arduino、Raspberry Pi等,这些单片机具有性能稳定、功耗低、适合实时控制等特点。 -
传感器
寻迹传感器:用于检测地面上的特定路径标记,如黑线。通常使用红外线传感器或光电传感器,通过检测反射光线的变化来确定路径位置。
避障传感器:用于检测小车前方是否存在障碍物,并测量障碍物的距离。常用的避障传感器包括超声波传感器和红外测距传感器。
设计程序
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
uchar temp, signal, tt1, t0, t1, t2, t3, t4, t5, t6;sbit jia = P3 ^ 1;
sbit jian = P3 ^ 2;uchar time = 20;void delay_1ms( uint d )
{uint i;while ( d-- )for ( i = 0; i < 75; i++ );
}void delay_50us( unsigned int t ) /* 延时函数 */
{unsigned int j, k;for (; t > 0; t-- ){for ( j = 10; j > 0; j-- ){for ( k = 1; k > 0; k-- );}}
}void motor_run() /* 电机起动 */
{P1 = 0x35;delay_1ms( 220 - time );P1 = 0x53;delay_1ms( time );
}void motor_left() /* 左进 */
{P1 = 0x30;delay_1ms( 220 - time );P1 = 0x00;delay_1ms( time );
}void motor_right() /* 右进 */
{P1 = 0x05;delay_1ms( 220 - time );P1 = 0x00;delay_1ms( time );
}void motor_big_right() /* 粗右进 */
{P1 = 0x55;delay_1ms( 220 - time );P1 = 0x00;delay_1ms( time );
}void motor_big_left()
{P1 = 0x33;delay_1ms( 220 - time );P1 = 0x00;delay_1ms( time );
}void motor_stop() /* 电机停止 */
{P1 = 0x00;
}void key_scan()
{if ( jia == 0 ) /* 判定 */{delay_50us( 100 );/* 延时 */if ( jia == 0 ){time++;if ( time == 200 )time = 200;while ( jia == 0 );/* 自锁 */}}if ( jian == 0 ) /* 判定 */{delay_50us( 100 );/* 延时 */if ( jian == 0 ){time--;if ( time == 20 )time = 20;while ( jian == 0 );/* 自锁 */}}
}void motor_back()
{P1 = 0x53;
}void main()
{t0 = 0;t1 = 0;t2 = 0;t3 = 0;t4 = 0;t5 = 0;t6 = 0;tt1 = 0;EA = 1;ET1 = 1;TR1 = 1;TMOD = 0x01;TH1 = -(1000 / 256);TL1 = -(1000 % 256);while ( 1 ){key_scan();if ( P3 == 0xfe ){motor_back();}else{temp = P2;signal = temp & 0xff; /* 得到红外反向信号 */switch ( signal ){case 0xff: /* 无偏差 */motor_run();t0++;if ( t0 == 10 ){t0 = 0;motor_left();motor_right();}t1 = t2 = t3 = t4 = t5 = t6 = 0;break;case 0xfd: /* 1轮右偏 */motor_big_left();t1++;if ( t1 == 4 ){t1 = 0;motor_left();}t0 = t2 = t3 = t4 = t5 = t6 = 0;break;case 0xef: /* 4轮左偏 */motor_big_right();t2++;if ( t2 == 4 ){t2 = 0;motor_right();}t0 = t1 = t3 = t4 = t5 = t6 = 0;break;case 0xfb: /* 2轮右偏出轨 */case 0xf9: /* 1、2轮右偏 */motor_big_left();t3++;if ( t3 == 4 ){t3 = 0;motor_left();}t0 = t1 = t2 = t4 = t5 = t6 = 0;
/* delay_1ms(10); */break;case 0xdf: /* 5左偏出轨 */case 0xcf: /* 4、5轮左偏 */motor_big_right();t4++;if ( t4 == 4 ){t4 = 0;motor_right();}t0 = t1 = t2 = t3 = t5 = t6 = 0;
/* delay_1ms(10); */break;case 0xfe: /* 0最右偏出轨 */case 0xfa:motor_big_left();t5++;if ( t5 == 1 ){t5 = 0;motor_left();motor_left();}t0 = t1 = t2 = t3 = t4 = t6 = 0;
/* delay_1ms(10); */break;case 0xbf: /* 6最左偏出轨 */case 0x9f:motor_big_right();t6++;if ( t6 == 1 ){t6 = 0;motor_right();motor_right();}t0 = t1 = t2 = t3 = t4 = t5 = 0;
/* delay_1ms(10); */break;case 0xeb: /* 前两传感器压在黑线上 */case 0xdb: /* 后两传感器压在黑线上 */case 0xbe: /* 中间两传感器压在黑线上 */case 0xac: /* 前四传感器压在黑线上 */case 0x9a: /* 后四传感器压在黑线上 */motor_back();delay_1ms( 200 );motor_stop();/* delay_1ms(1000); */default:
/** motor_back();* delay_1ms(50);* motor_left();* motor_right();*/break;}}}
}/*void time1() interrupt 3* {** TH1=-(1000/256);* TL1=-(1000%256);* tt1++;* if(tt1==300)* {* motor_back();* // delay_1ms(1);* tt1=0;* }* } */具体实现截图


设计获取
文章下方名片联系我即可~
精彩专栏推荐订阅:在下方专栏👇🏻
毕业设计精品实战案例
收藏关注不迷路!!
🌟文末获取设计🌟
相关文章:
基于单片机巡迹避障智能小车系统
文章目录 前言资料获取设计介绍设计程序具体实现截图设计获取 前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计划导师,一名热衷于单片机技术探索与分享的博主、专注于 精通51/STM32/MSP430/AVR等单片机设计 主要对象是咱们…...

Python163邮箱发送:提升发送效率的技巧?
python163邮箱发送邮件教程?python怎么使用163邮箱? Python163邮箱发送作为一种自动化邮件发送方式,越来越受到开发者和企业的青睐。AokSend将探讨如何通过多种技巧提升Python163邮箱发送的效率,从而更好地满足用户需求。 Pytho…...

springboot中的异步任务
在springboot项目中可以通过EnableAsyncAsync的方式简化异步操作,下文使用springboot:3.2.1 源码分析 若一个bean中的公共方法上标注了Async,在系统启动时,会给这个类创建一个代理对象,并将该代理对象作为bean注册到spring容器中 …...

Linux学习笔记8 理解Ubuntu网络管理,做自己网络的主人
本文讲解了Ubuntu下网络由什么管理,介绍了临时ip和路由的设置方法,介绍了静态持久化网络配置的方法以及各网络管理软件之间的关系。 来看看Ubuntu网络管理。 序言 原本学习ubuntu网络管理就是为了检查nginx安装过程中使用wget获取压缩包为什么解析不出…...

理解线程的三大特性:原子性、可见性和有序性
在并发编程中,保护线程安全是一个重要课题。要实现线程安全,我们必须理解并掌握三个核心概念:原子性、可见性和有序性。下面将详细介绍这三个特性及其解决方案。 一、原子性 原子性是指一个操作要么全部完成,要么完全不执行。在多…...

英特尔®以太网网络适配器E810-CQDA1 / E810-CQDA2 网卡 规格书 e810 网卡 规格书 Intel100G E810 网卡 白皮书
英特尔以太网800系列网络适配器 英特尔以太网网络适配器E810-CQDA1 / CQDA2 在10到100Gbps的以太网速度下实现高效的工作负载优化性能 关键特性 •单、双端口QSFP28 •应用设备队列(ADQ) •PCI Express (PCIe) 4.0 x16 •动态设备个性化(DDP) •以太网端口配置工具(EPC…...

好用的idea方法分隔符插件
好用的idea方法分隔符插件...

通过 Xshell 无法连接到 Ubuntu
无法通过 Xshell 连接到 Ubuntu 服务器,通常与 SSH 服务、网络连接、主机防火墙设置问题有关。以下是排查并解决这个问题的步骤: 1. 确保 SSH 服务正在运行 在 Ubuntu 上,SSH 服务必须启动才能连接。如果你有虚拟机或物理机的访问权限&…...

Java面试篇基础部分-Synchronized关键字详解
Synchronized关键字用于对Java对象、方法、代码块等提供线程安全操作。Synchronized属于独占式的悲观锁机制,同时也是可重入锁。我们在使用Synchronized关键字的时候,可以保证同一时刻只有一个线程对该对象进行访问;也就是说它在同一个JVM中是线程安全的。 Java中的每个…...

数据结构之线性表——LeetCode:67. 二进制求和,27. 移除元素,26. 删除有序数组中的重复项
67. 二进制求和 题目描述 67. 二进制求和 给你两个二进制字符串 a 和 b ,以二进制字符串的形式返回它们的和。 运行代码(javaC) class Solution {public String addBinary(String a, String b) {StringBuilder ansnew StringBuilder();int ca0;for(i…...

SQL_HAVING小例子
例一 求众数的sql语句1: select income,count(*) as cnt from graduates group by income having count(*) > all(select count(*) from graduates group by income);这段SQL语句的作用是从一个名为graduates的表中找出income(收入)字段…...

Avalonia第三方UI库Semi.Avalonia用法详解
文章目录 简介一、安装Semi Avalonia二、基本项目结构三、使用基本控件1 按钮控件2 输入框控件3 选择框控件四、自定义样式和主题五、使用布局控件六、数据绑定七、事件处理八、使用图标和其他资源九、响应式设计十、交互与导航总结简介 Semi是一个基于Avalonia的UI库,旨在提供…...

宠物智能化听诊器的健康管理!
智能听诊器在宠物健康领域的应用正逐渐普及,它通过创新技术为宠物医疗保健带来革新。以下是智能听诊器如何影响宠物健康管理的概述: 数据分析与机器学习 智能听诊器利用深度学习算法,识别宠物心脏和呼吸模式,提供健康分析和诊断建…...

MyBatis-Plus 实体类注解
MyBatis-Plus 实体类注解详解 MyBatis-Plus 是 MyBatis 的增强版,旨在简化开发者的 CRUD 操作。它通过丰富的特性和注解,简化了数据库与 Java 实体类之间的映射。MyBatis-Plus 提供了一系列的实体类注解,帮助开发者更轻松地映射数据库表、字…...

如何写一个自动化Linux脚本去进行等保测试--引言
#我的师兄喜欢给我的休闲实习生活加活,说是让我在实习期间写一个自动化脚本去进行等保测试。呵呵哒。 怎么办呢,师兄的指令得完成,师兄说让我使用Python完成任务。 设想如下: 1、将Linux指令嵌入到python脚本中 2、调试跑通 …...

美团测开OC!
大家好,我是洋子,最近测试社区里面的一个25届同学参加秋招,已经拿到美团测开offer,今天来分享一下他的求职经历,文末附面经 他求职目前的进展如下: 互联网大厂:字节,阿里ÿ…...

HyperWorks的实体几何创建与六面体网格剖分
创建和编辑实体几何 在 HyperMesh 有限元前处理环境中,有许多操作是针对“实体几何”的,例如创建六面体网格。在创建实体网格的工作中,我们既可以使用闭合曲面创建实体网格,也可以使用完整的实体几何创建实体网格。与闭合曲面相比…...

项目实战:Ingress搭建Nginx+WP论坛+MariaDB
1. 网站架构 本次部署形式完全舍弃 Docker,将所有应用都置于Kubernetes,采用 Deployment 而非单 Pod 部署,稳定性得到升级。 2. 部署 MariaDB [rootk8s-master ~]# mkdir tdr [rootk8s-master ~]# cd tdr/ (1)定义 …...
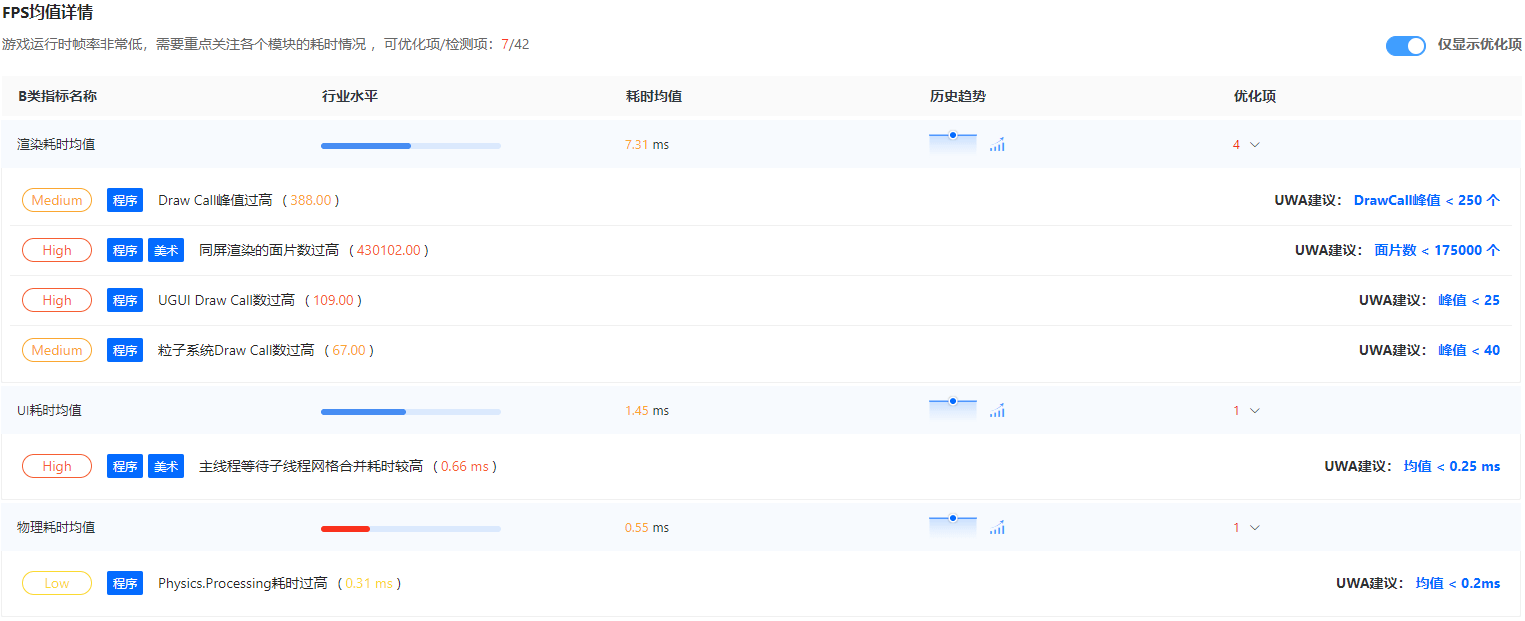
UWA支持鸿蒙HarmonyOS NEXT
华为在开发者大会上,宣布了鸿蒙HarmonyOS NEXT将仅支持鸿蒙内核和鸿蒙系统的应用,不再兼容安卓应用,这意味着它将构建一个全新且完全独立的生态系统。 为此,UWA也将在最新版的UWA SDK v2.5.0中支持鸿蒙HarmonyOS NEXT,…...

【齐家网-注册/登录安全分析报告】
前言 由于网站注册入口容易被黑客攻击,存在如下安全问题: 暴力破解密码,造成用户信息泄露短信盗刷的安全问题,影响业务及导致用户投诉带来经济损失,尤其是后付费客户,风险巨大,造成亏损无底洞…...
)
车道线检测入门:从CULane数据集结构到模型训练(PyTorch实战)
车道线检测实战:从CULane数据集解析到PyTorch模型训练全流程 1. 理解CULane数据集的核心价值 车道线检测作为自动驾驶感知层的关键技术,其性能高度依赖高质量的数据集。CULane凭借其复杂城市道路场景和精细标注,已成为该领域的基准测试集之一…...

深入Keil5编译器:解读#1295-D警告背后的C语言函数原型进化史
深入Keil5编译器:解读#1295-D警告背后的C语言函数原型进化史 当你在Keil5环境下打开一个遗留的单片机项目时,那个看似微不足道的#1295-D: Deprecated declaration警告可能正暗示着一段跨越四十年的编程语言进化史。这个关于函数声明的警告不是Keil5的任…...

零碳园区绿电直供技术的挑战与解决方案
一、难点问题 二次系统+储能推高初投 篇幅有限仅展示了部分 根据650号文 ,绿电直连项目必须配置继电保护、安全稳定控制装置和通信设备等二次系统 ,以确保项目的安全性和稳定性。这些强制性配置显著增加了项目的初始投资成本。 专线造价与全周…...

法律检索效率暴跌83%?Perplexity法律文献搜索的3大隐藏功能,律所内部培训刚流出
更多请点击: https://kaifayun.com 第一章:法律检索效率暴跌83%?Perplexity法律文献搜索的3大隐藏功能,律所内部培训刚流出 当某红圈所合伙人发现团队平均单案法律检索耗时从2.1小时飙升至11.4小时,真相竟是——传统关…...

STM32F103C8T6驱动BMP280气压模块:从I2C地址纠错到数据转换的完整避坑指南
STM32F103C8T6驱动BMP280气压模块:从I2C地址纠错到数据转换的完整避坑指南 在嵌入式开发中,气压传感器BMP280因其高精度和低成本成为许多项目的首选。然而,当这个看似简单的模块遇上STM32F103C8T6这颗经典的MCU时,不少开发者却踩进…...

Lenovo Legion Toolkit 维护版继续升级
Lenovo Legion Toolkit 维护版在继续更新。 项目地址:https://github.com/SSC-STUDIO/LenovoLegionToolkit 下载地址:https://github.com/SSC-STUDIO/LenovoLegionToolkit/releases/latest 这个版本面向 Windows 上的 Legion / IdeaPad Gaming / LOQ …...
)
Cesium实战:手把手封装一个带交互提示的测量工具(距离/面积/高度)
Cesium实战:从零封装高交互性测量工具全攻略 在三维地理信息系统的开发中,测量功能是最基础却又最考验细节的模块之一。许多开发者在使用Cesium时,往往满足于直接调用现成的测量插件,却忽略了背后精妙的交互设计和性能优化空间。本…...
)
Oracle 19c单实例安装后,别忘了做这5个安全与性能基础配置(CentOS 7版)
Oracle 19c单实例安装后的5个关键安全与性能配置指南(CentOS 7环境) 刚完成Oracle 19c的安装只是数据库管理的第一步。许多初级DBA常犯的错误是认为安装成功就意味着工作结束,实际上默认配置往往存在严重的安全漏洞和性能隐患。本文将带您完成…...

深度解析causal-conv1d:CUDA加速的因果深度卷积专业指南
深度解析causal-conv1d:CUDA加速的因果深度卷积专业指南 【免费下载链接】causal-conv1d Causal depthwise conv1d in CUDA, with a PyTorch interface 项目地址: https://gitcode.com/gh_mirrors/ca/causal-conv1d causal-conv1d是一个专为时间序列数据优化…...

如何在Windows上完美使用苹果触控板:终极配置指南
如何在Windows上完美使用苹果触控板:终极配置指南 【免费下载链接】mac-precision-touchpad Windows Precision Touchpad Driver Implementation for Apple MacBook / Magic Trackpad 项目地址: https://gitcode.com/gh_mirrors/ma/mac-precision-touchpad 还…...