GPS在Linux下的使用(war driving的前置学习)
1.ls /dev/tty* 列出所有与 tty 相关的设备文件。这些设备文件通常对应终端设备

ttyUSB0是GPS端口
2.cat /dev/ttyUSB0 用于读取并显示连接到 /dev/ttyUSB0 串口设备发送的原始数据
这种是GPS定位不全的,要拿到更开阔的地方
这种是GPS定位全的

因为会持续输出,所以可以按CTRL^c进行停止
3.GPS语句说明
GPS 输出的语句标准符合 NMEA‐0183
V3.01 规范,输出的语句为$GPGGA, $GPGSA, $GPGSV, $GPRMC, $GPVTG,刷新率:
1Hz。
这是 5 秒钟通过串口发送的数据内容:
$GPGGA,081559.000,2607.3480,N,11917.4707,E,1,04,2.5,134.2,M,,,,0000*0F
$GPGSA,A,3,14,22,21,31,,,,,,,,,2.7,2.5,1.0*35
$GPGSV,2,1,08,18,68,148,,22,64,313,22,50,48,132,,12,44,076,*70
$GPGSV,2,2,08,14,36,316,34,31,24,242,30,21,17,194,29,15,13,088,*75
$GPRMC,081559.000,A,2607.3480,N,11917.4707,E,1.10,211.8,280212,,*35
$GPVTG,211.8,T,,M,1.10,N,2.0,K*58
$GPGGA,081600.000,2607.3480,N,11917.4711,E,1,04,2.5,134.1,M,,,,0000*04
$GPGSA,A,3,14,22,21,31,,,,,,,,,2.7,2.5,1.0*35
$GPGSV,2,1,08,18,68,148,,22,64,313,23,50,48,132,,12,44,076,*71
$GPGSV,2,2,08,14,36,316,34,31,24,242,30,21,17,194,29,15,13,088,*75
$GPRMC,081600.000,A,2607.3480,N,11917.4711,E,0.74,211.8,280212,,*3E
$GPVTG,211.8,T,,M,0.74,N,1.4,K*5C
$GPGGA,081601.000,2607.3480,N,11917.4714,E,1,04,2.5,134.1,M,,,,0000*00
$GPGSA,A,3,14,22,21,31,,,,,,,,,2.7,2.5,1.0*35
$GPGSV,2,1,08,18,68,148,,22,64,313,23,50,48,132,,12,44,076,*71
$GPGSV,2,2,08,14,36,316,34,31,24,242,31,21,17,194,29,15,13,088,*74
$GPRMC,081601.000,A,2607.3480,N,11917.4714,E,0.52,211.8,280212,,*3E
$GPVTG,211.8,T,,M,0.52,N,1.0,K*5C
$GPGGA,081602.000,2607.3478,N,11917.4718,E,1,04,2.5,134.0,M,,,,0000*09
$GPGSA,A,3,14,22,21,31,,,,,,,,,2.7,2.5,1.0*35
$GPGSV,2,1,08,18,68,148,,22,64,313,23,50,48,132,,12,44,076,*71
$GPGSV,2,2,08,14,36,316,34,31,24,242,31,21,17,194,29,15,13,088,*74
$GPRMC,081602.000,A,2607.3478,N,11917.4718,E,0.81,211.8,280212,,*38
$GPVTG,211.8,T,,M,0.81,N,1.5,K*57
$GPGGA,081603.000,2607.3476,N,11917.4728,E,1,04,2.5,133.9,M,,,,0000*0B
$GPGSA,A,3,14,22,21,31,,,,,,,,,2.7,2.5,1.0*35
$GPGSV,2,1,08,18,68,148,,22,64,313,23,50,48,132,,12,44,076,*71
$GPGSV,2,2,08,14,36,316,34,31,24,242,31,21,17,194,29,15,13,088,*74
$GPRMC,081603.000,A,2607.3476,N,11917.4728,E,1.15,211.8,280212,,*38
$GPVTG,211.8,T,,M,1.15,N,2.1,K*5C
以下是 NMEA‐0183 语句详解
1.Global Positioning System Fix Data(GGA)GPS 定位信息
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh<CR><LF>
<1> UTC 时间,hhmmss(时分秒)格式
<2> 纬度 ddmm.mmmm(度分)格式(前面的 0 也将被传输)
<3> 纬度半球 N(北半球)或 S(南半球)
<4> 经度 dddmm.mmmm(度分)格式(前面的 0 也将被传输)
<5> 经度半球 E(东经)或 W(西经)
<6> GPS 状态:0=未定位,1=非差分定位,2=差分定位,6=正在估算
<7> 正在使用解算位置的卫星数量(00~12)(前面的 0 也将被传输)<8> HDOP 水平精度因子(0.5~99.9)
<9> 海拔高度(‐9999.9~99999.9)
<10> 地球椭球面相对大地水准面的高度
<11> 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为
空)
<12> 差分站 ID 号 0000~1023(前面的 0 也将被传输,如果不是差分定位将为空)
2.GPS DOP and Active Satellites(GSA)当前卫星信息
$GPGSA,<1>,<2>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<3>,<4>,<5>,<6>*hh<CR><LF>
<1> 模式,M=手动,A=自动
<2> 定位类型,1=没有定位,2=2D 定位,3=3D 定位
<3> PRN 码(伪随机噪声码),正在用于解算位置的卫星号(01~32,前面的 0 也将被传输)。
<4> PDOP 位置精度因子(0.5~99.9)
<5> HDOP 水平精度因子(0.5~99.9)
<6> VDOP 垂直精度因子(0.5~99.9)
3.GPS Satellites in View(GSV)可见卫星信息
$GPGSV,<1>,<2>,<3>,<4>,<5>,<6>,<7>,…<4>,<5>,<6>,<7>*hh<CR><LF>
<1> GSV 语句的总数
<2> 本句 GSV 的编号
<3> 可见卫星的总数(00~12,前面的 0 也将被传输)
<4> PRN 码(伪随机噪声码)(01~32,前面的 0 也将被传输)
<5> 卫星仰角(00~90 度,前面的 0 也将被传输)
<6> 卫星方位角(000~359 度,前面的 0 也将被传输)
<7> 信噪比(00~99dB,没有跟踪到卫星时为空,前面的 0 也将被传输)
注:<4>,<5>,<6>,<7>信息将按照每颗卫星进行循环显示,每条 GSV 语句最多可以显示 4 颗卫星的信息。其他卫星信息将在下一序列的 NMEA0183 语句中输出。
4.Recommended Minimum Specific GPS/TRANSIT Data(RMC)推荐最短定位信息
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh<CR><LF>
<1> UTC 时间,hhmmss(时分秒)格式
<2> 定位状态,A=有效定位,V=无效定位
<3> 纬度 ddmm.mmmm(度分)格式(前面的 0 也将被传输)
<4> 纬度半球 N(北半球)或 S(南半球)
<5> 经度 dddmm.mmmm(度分)格式(前面的 0 也将被传输)
<6> 经度半球 E(东经)或 W(西经)
<7> 地面速率(000.0~999.9 节,前面的 0 也将被传输)
<8> 地面航向(000.0~359.9 度,以真北为参考基准,前面的 0 也将被传输)
<9> UTC 日期,ddmmyy(日月年)格式
<10> 磁偏角(000.0~180.0 度,前面的 0 也将被传输)
<11> 磁偏角方向,E(东)或 W(西)
相关文章:
GPS在Linux下的使用(war driving的前置学习)
1.ls /dev/tty* 列出所有与 tty 相关的设备文件。这些设备文件通常对应终端设备 ttyUSB0是GPS端口 2.cat /dev/ttyUSB0 用于读取并显示连接到 /dev/ttyUSB0 串口设备发送的原始数据 这种是GPS定位不全的,要拿到更开阔的地方 这种是GPS定位全的 因为会持续输出…...
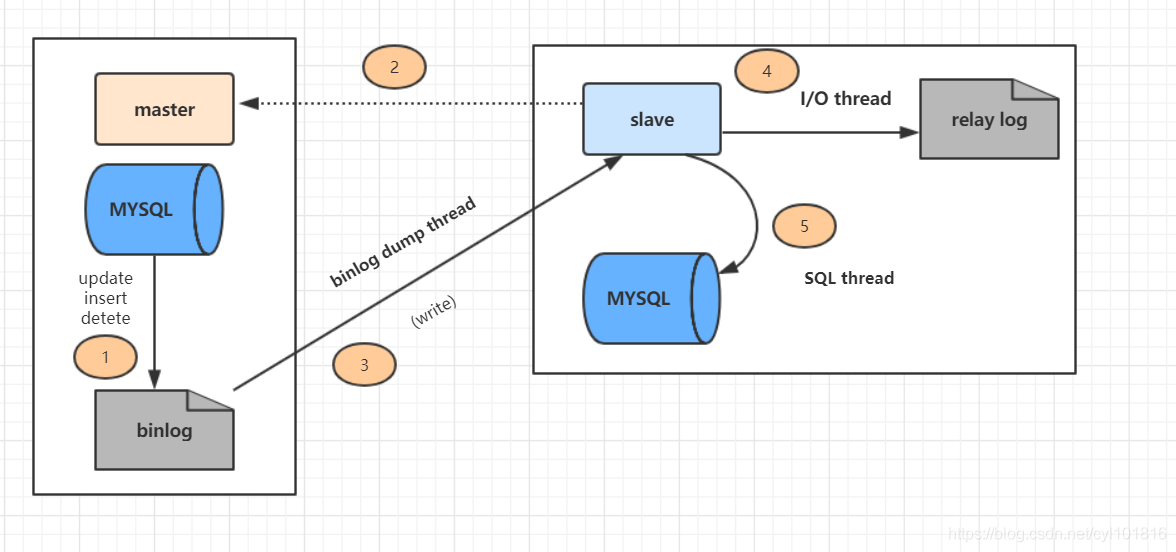
开发经验总结: 读写分离简单实现
背景 使用mysql的代理中间件,某些接口如果主从同步延迟大,容易出现逻辑问题。所以程序中没有直接使用这个中间件。 依赖程序逻辑,如果有一些接口可以走读库,需要一个可以显示指定读库的方式来连接读库,降低主库的压力…...
MySQL(面试题 - 同类型归纳面试题)
目录 一、MySQL 数据类型 1. 数据库存储日期格式时,如何考虑时区转换问题? 2. Blob和text有什么区别? 3. mysql里记录货币用什么字段类型比较好? 4. MySQL如何获取当前日期? 5. 你们数据库是否支持emoji表情存储&…...

【C++ Primer Plus习题】17.7
问题: 解答: #include <iostream> #include <vector> #include <string> #include <fstream> #include <algorithm>using namespace std;const int LIMIT 50;void ShowStr(const string& str); void GetStrs(ifstream& fin, vector<…...
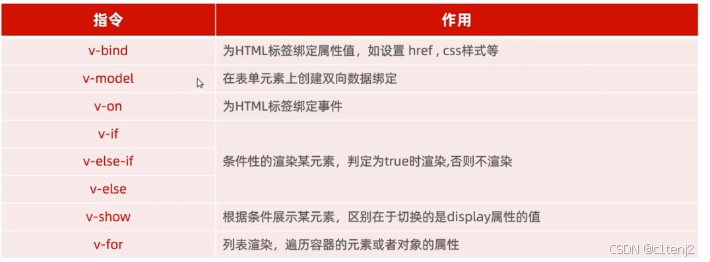
vue3(整合版)
创建第一个vue项目 1.安装node.js cmd输入node查看是否安装成功 2.vscode开启一个终端,配置淘宝镜像 # 修改为淘宝镜像源 npm config set registry https://registry.npmmirror.com 输入如下命令创建第一个Vue项目 3.下载依赖,启动项目 访问5173端口 …...

复制他人 CSDN 文章到自己的博客
文章目录 0.前言步骤 0.前言 在复制别人文章发布时,记得表明转载哦 步骤 在需要复制的csdn 文章页面,打开浏览器开发者工具(F12)Ctrl F 查找"article_content"标签头 右键“Copy”->“Copy element”新建一个 tx…...

【算法——二分查找】
理论基础: 程序员面试经典题,二分搜索一个区间,区间查找 (LeetCode 34)_哔哩哔哩_bilibili 手把手带你撕出正确的二分法 | 二分查找法 | 二分搜索法 | LeetCode:704. 二分查找_哔哩哔哩_bilibili 这个是红蓝法,很牛…...

Cisco Packet Tracer的安装加汉化
这个工具学计算机网络的同学会用到 1.下载安装 网盘链接:https://pan.baidu.com/s/1CmnxAD9MkCtE7pc8Tjw0IA 提取码:frkb 点击第一个进行安装,按步骤来即可。 2.汉化 (1)复制chinese.ptl文件 (2&…...

MMain函数定义为WinMain函数看port1632.h和pwin32.h文件
编译win2k3的源代码的时候有时候看到MMain函数 ..//public/sdk/inc/port1632.h #if defined(WIN16) /* ---------------- Maps to windows 3.0 and 3.1 16-bit APIs ----------------*/ #include "ptypes16.h" #include "pwin16.h" #include "plan16.…...

单词搜索问题(涉及递归等)
目录 一题目: 二思路解释: 三解答代码: 一题目: newcode题目链接: 单词搜索_牛客题霸_牛客网 二思路解释: 思路:个人理解是找到word中的第一个元素,然后去递归的上下左右查找&am…...

Redis的一些通用指令
首先我们需要先连接客户端服务器,此时我们需要通过redis-cli和redis服务器进行交互,输入ping来确保通路的流畅 (一)get和set redis中最核心的两个命令就是get和set,get就是根据key来取出对应value,set就是把…...

C++中vector类的使用
目录 1.vector类常用接口说明 1.1默认成员函数 1.1.1构造函数(constructor) 1.1.2 赋值运算符重载(operator()) 2. vector对象的访问及遍历操作(Iterators and Element access) 3.vector类对象的容量操作(Capacity) 4. vector类对象的修改及相关操作(Modifiers and Stri…...

cmaklist流程控制——调试及发布
cmaklist流程控制 目前只会配置-编译调试-打包发布,并且不会workflow控制 后续学习配置-编译调试-测试-打包发布,workflow控制,理解整个流程,目前对流程控制理解也不够。 1.CMake Presets 先于Cmakelist文件,指导项…...

制作一个能对话能跳舞的otto机器人
OTTO机器人是一个开源外壳,硬件和软件的桌面机器人项目,非常适合新手研究和拓展。记住,他是一个能移动有表情能声音的机器人。 b站有很多演示和组装的视频,我就不多说了,照着做就好,因为硬件我也是刚入门&…...

git配置SSH
1 打开cmd窗口 2 在窗口中输入如下命令: 配置用户名: git config --global user.name “gyk” 配置邮箱: git config --global user.email “247929163qq.com” 继续在Git命令窗口中输入如下命令,即可生成SSH公钥和私钥 ss…...

mozilla/pdf.js view.html加载指定页码
mozilla/pdf.js view.html加载指定页码 在Mozilla’s PDF.js中,如果你想要在viewer.html加载时直接跳转到指定的页码,你可以通过修改URL来实现。 PDF.js使用查询参数来处理URL,其中page参数用于指定页码。你可以通过修改URL的查询字符串来设…...

Qt之QFuture理解
结构 #mermaid-svg-J9J683RG8QjtEqoM {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-J9J683RG8QjtEqoM .error-icon{fill:#552222;}#mermaid-svg-J9J683RG8QjtEqoM .error-text{fill:#552222;stroke:#552222;}#merm…...
)
求二叉树的高度(递归和非递归)
假设二叉树采用二叉链表存储结构,设计一个算法求二叉树的高度。 递归: int getTreeHight(BiTree T){if(TNULL){return 0;}else {int lh getTreeHight(T->lchild);int rh getTreeHight(T->rchild);return (lh>rh?lh:rh)1;}}时间复杂度O(n)&a…...

Java查找算法——(四)分块查找(完整详解,附有代码+案例)
文章目录 分块查找1.1普通分块查找 分块查找 1.1普通分块查找 分块原则: 块内无序,块间有序:前一块中的最大数据,小于后一块中所有的数据,块与块之间不能有数据重复的交集。块的数量一般等于数字个数开根号 核心思路ÿ…...

进制数知识(2)—— 浮点数在内存中的存储 和 易混淆的二进制知识总结
目录 1. 浮点数在内存中的存储 1.1 浮点数的大V表示法 1.2 浮点数的存储格式 1.3 浮点数的存入规则 1.4 浮点数的读取规则 1.5 补充:移码与掩码 1.6 题目解析 2. 易错的二进制知识 2.0 符号位到底会不会参与运算? 2.0.1 存储前的编码变化运算 …...

自托管链接管理平台Linko:Go+React技术栈部署与核心功能解析
1. 项目概述与核心价值最近在折腾一个挺有意思的开源项目,叫monsterxx03/linko。乍一看这个名字,可能有点摸不着头脑,但如果你经常需要管理一堆链接、书签,或者在做内容聚合、个人知识库,那这个工具很可能就是你一直在…...

OCT-X算法:早期胃癌AI检测的技术突破与应用
1. OCT-X算法:早期胃癌AI检测的技术突破在医疗影像分析领域,胃癌早期检测一直面临着巨大挑战。传统内窥镜检查依赖医生经验判断,存在主观性强、漏诊率高等问题。我们团队开发的OCT-X(One Class Twin Cross Learning)算…...

React轻量级代码编辑器组件:基于Textarea的语法高亮方案
1. 项目概述:一个为React开发者量身打造的代码编辑器组件 如果你在React项目中需要嵌入一个代码编辑器,并且希望它轻量、美观、开箱即用,那么 uiwjs/react-textarea-code-editor 这个组件库很可能就是你一直在寻找的解决方案。它不是一个像…...

MySQL-MVCC核心原理-版本链ReadView与可见性判断
MVCC 全称是 Multi-Version Concurrency Control,也就是多版本并发控制。它的核心思想是:为同一行数据维护多个版本,让读写在很多情况下不用互相阻塞。 没有 MVCC 时,读写冲突通常要大量依赖锁。MVCC 让普通 select 可以读一个可见…...

数据模型代码生成器:从OpenAPI/Schema自动生成Python类型安全模型
1. 项目概述:当数据模型遇上代码生成如果你经常和数据模型打交道,无论是OpenAPI规范、JSON Schema,还是数据库的DDL,那你一定体会过手动编写对应数据类(Data Class)或Pydantic模型的繁琐。一个字段类型写错…...

AI攻防时间差:当漏洞发现速度碾压修复速度— 聚焦技术核心
AI攻防时间差:当漏洞发现速度碾压修复速度 — 聚焦技术核心 引言:当两个世界碰撞 2026年5月,对于网络安全领域而言,是一个具有分水岭意义的月份。 一边是360人工智能安全研究院在5月12日发布的重磅报告,首次提出**“AI…...

嵌入式开发内存优化实战:裁剪IRLib2红外库,释放微控制器Flash空间
1. 项目概述:当红外遥控遇上内存焦虑红外遥控,这个听起来有点“复古”的技术,至今仍是智能家居、玩具和各类嵌入式设备里最经济可靠的无线通信方案之一。它的原理不复杂:用一个特定频率(通常是38kHz)的载波…...

赛车电气系统设计的现代化转型与实践
1. 赛车电气系统设计的现状与挑战当人们谈论赛车技术时,脑海中浮现的往往是碳纤维车身、空气动力学套件或是大马力发动机。但在这光鲜亮丽的表象背后,电气系统才是现代赛车的"神经系统"。有趣的是,这个关键领域的设计方法却呈现出两…...

ctfileGet:城通网盘直连地址解析工具的技术原理与实用指南
ctfileGet:城通网盘直连地址解析工具的技术原理与实用指南 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet ctfileGet是一个基于Web的开源工具,专门用于解析城通网盘分享链接并获…...

儿童语音合成不能只靠“可爱”!ElevenLabs底层音素建模缺陷与3种年龄适配性补偿方案,一线教育科技团队内部流出
更多请点击: https://intelliparadigm.com 第一章:儿童语音合成不能只靠“可爱”!ElevenLabs底层音素建模缺陷与3种年龄适配性补偿方案,一线教育科技团队内部流出 ElevenLabs 的 TTS 模型虽在成人语音自然度上表现优异࿰…...