ftdi_sio驱动学习笔记 3 - 端口操作
目录
1. ftdi_port_probe
1.1 私有数据结构ftdi_private
1.2 特殊probe处理
1.3 确定FTDI设备类型
1.4 确定最大数据包大小
1.5 设置读取延迟时间
1.6 初始化GPIO
1.6.1 使能GPIO
1.6.2 添加到系统
1.6.2.1 设置GPIO控制器的基本信息
1.6.2.2 设置GPIO控制器的元信息
1.6.3 GPIO实例
2. ftdi_gpio_remove
int (*port_probe)(struct usb_serial_port *port): 端口探测函数ftdi_port_probe,用于初始化单个端口。
void (*port_remove)(struct usb_serial_port *port): 端口移除函数ftdi_port_remove
ftdi_port_remove,用于清理单个端口。
1. ftdi_port_probe
1.1 私有数据结构ftdi_private
这个结构是FTDI设备特有的,其实就是用来在驱动中传递参数用的。在这个结构体中定义了FTDI设备私有的一些变量。
struct ftdi_private *priv;
priv = kzalloc(sizeof(struct ftdi_private), GFP_KERNEL);
if (!priv)return -ENOMEM;这个私有数据是通过usb_set_serial_port_data放到port的私有数据保存。
usb_set_serial_port_data(port, priv);1.2 特殊probe处理
和上一节一样,端口的probe处理也是有特殊的情况。这个结构体是通过port->serial传递的。
const struct ftdi_quirk *quirk = usb_get_serial_data(port->serial);
if (quirk && quirk->port_probe)quirk->port_probe(priv);1.3 确定FTDI设备类型
result = ftdi_determine_type(port);
if (result)goto err_free;该类型是通过设备描述符中的bcdDevice来区别的。
version = le16_to_cpu(udev->descriptor.bcdDevice);以FT4232H为例,该值可以在设备属性的硬件ID中查看到,如下图REV_0800

case 0x800:priv->chip_type = FT4232H;break;通过当前接口初始化通道编号,这只对多串口有意义(比如FT2232H和FT4232H)
#define CHANNEL_A 1
#define CHANNEL_B 2
#define CHANNEL_C 3
#define CHANNEL_D 4ifnum = serial->interface->cur_altsetting->desc.bInterfaceNumber;
priv->channel = CHANNEL_A + ifnum;而baud_base是指波特率产生器的参考时钟,默认设置的是H系列的值:120M的二分频。
priv->baud_base = 120000000 / 2;最后是向设备节点发送消息,表明检测到了哪种类型的FTDI芯片。
dev_info(&udev->dev, "Detected %s\n", ftdi_chip_name[priv->chip_type]);在命令“sudo dmesg”返回结果中可以找到这句信息内容,例如:
[16005.322690] usb 2-1: Detected FT4232H1.4 确定最大数据包大小
ftdi_set_max_packet_size(port);这是从设备的端点描述符中获取设备端点最大数据包大小。这一步更像是检查FT232R的端点数据包最大值被客制为0的情况,当被改为0时数据包大小设置为64字节。
1.5 设置读取延迟时间
if (read_latency_timer(port) < 0)priv->latency = 16;
write_latency_timer(port);这段代码的作用是确保设备的读取延迟时间被正确设置,如果无法获取当前的延迟时间,则会使用一个默认值进行设置。
获取这个参数是通过函数usb_control_msg_recv实现的。
int usb_control_msg_recv(struct usb_device *dev, __u8 endpoint, __u8 request,__u8 requesttype, __u16 value, __u16 index,void *driver_data, __u16 size, int timeout,gfp_t memflags)对应的调用:
rv = usb_control_msg_recv(udev, 0, FTDI_SIO_GET_LATENCY_TIMER_REQUEST,FTDI_SIO_GET_LATENCY_TIMER_REQUEST_TYPE, 0,priv->channel, &buf, 1, WDR_TIMEOUT,GFP_KERNEL);其中参数request和requesttype在ftdi_sio.h中有定义:
#define FTDI_SIO_GET_LATENCY_TIMER 0x0a /* Get the latency timer */
#define FTDI_SIO_GET_LATENCY_TIMER_REQUEST FTDI_SIO_GET_LATENCY_TIMER
#define FTDI_SIO_GET_LATENCY_TIMER_REQUEST_TYPE 0xC0这属于FTDI定义的命令。
同样,写这个参数的命令是:
#define FTDI_SIO_SET_LATENCY_TIMER 9 /* Set the latency timer */
#define FTDI_SIO_SET_LATENCY_TIMER_REQUEST FTDI_SIO_SET_LATENCY_TIMER
#define FTDI_SIO_SET_LATENCY_TIMER_REQUEST_TYPE 0x40rv = usb_control_msg(udev,usb_sndctrlpipe(udev, 0),FTDI_SIO_SET_LATENCY_TIMER_REQUEST,FTDI_SIO_SET_LATENCY_TIMER_REQUEST_TYPE,l, priv->channel,NULL, 0, WDR_TIMEOUT);1.6 初始化GPIO
这部分是利用了FTDI的CBUS实现USB转GPIO的功能。这一步是受内核配置CONFIG_GPIOLIB控制的,如果没有使能GPIOLIB,则没有这部分功能。
1.6.1 使能GPIO
由于不是所有的FTDI芯片都支持CBUS功能,所以前面有做芯片类型的判断,这里会引用这个变量分别处理。
switch (priv->chip_type) {
case FT232H:result = ftdi_gpio_init_ft232h(port);break;
case FT232R:result = ftdi_gpio_init_ft232r(port);break;
case FTX:result = ftdi_gpio_init_ftx(port);break;
default:return 0;
}只有3类芯片支持CBUS功能,这里3个分支都是从芯片(或外置EEPROM)中读取CBUS配置信息使能CBUS脚。例如FT232H,一共有4个CBUS脚,分别为AC5,AC6,AC8和AC9,从eeprom的地址0x1a读入4个字节
ret = ftdi_read_eeprom(port->serial, buf, 0x1a, 4);
if (ret < 0)goto out_free;每个GPIO由4位表示方向和电平。
/*
* FT232H CBUS Memory Map
*
* 0x1a: X- (upper nibble -> AC5)
* 0x1b: -X (lower nibble -> AC6)
* 0x1c: XX (upper nibble -> AC9 | lower nibble -> AC8)
*/
cbus_config = buf[2] << 8 | (buf[1] & 0xf) << 4 | (buf[0] & 0xf0) >> 4;最后更新priv->gc.ngpio和gpio_altfunc,对应GPIO使能的话,gpio_altfunc对应的位清零
priv->gc.ngpio = 4;
priv->gpio_altfunc = 0xff;for (i = 0; i < priv->gc.ngpio; ++i) {if ((cbus_config & 0xf) == FTDI_FTX_CBUS_MUX_GPIO)priv->gpio_altfunc &= ~BIT(i);cbus_config >>= 4;
}1.6.2 添加到系统
这一步是通过标准的gpiochip的驱动API函数gpiochip_add_data实现。
priv->gc.label = "ftdi-cbus";
priv->gc.request = ftdi_gpio_request;
priv->gc.get_direction = ftdi_gpio_direction_get;
priv->gc.direction_input = ftdi_gpio_direction_input;
priv->gc.direction_output = ftdi_gpio_direction_output;
priv->gc.init_valid_mask = ftdi_gpio_init_valid_mask;
priv->gc.get = ftdi_gpio_get;
priv->gc.set = ftdi_gpio_set;
priv->gc.get_multiple = ftdi_gpio_get_multiple;
priv->gc.set_multiple = ftdi_gpio_set_multiple;
priv->gc.owner = THIS_MODULE;
priv->gc.parent = &serial->interface->dev;
priv->gc.base = -1;
priv->gc.can_sleep = true;result = gpiochip_add_data(&priv->gc, port);
if (!result)priv->gpio_registered = true;第一个参数priv->gc是配置好的`gpio_chip`结构体,第二个参数是该gpio_chip的私有数据,即实现接口参数的传递,例如:
static int ftdi_gpio_request(struct gpio_chip *gc, unsigned int offset)
{struct usb_serial_port *port = gpiochip_get_data(gc);1.6.2.1 设置GPIO控制器的基本信息
- priv->gc.label: 设置GPIO控制器的标签为"ftdi-cbus"。
- priv->gc.request: 设置请求GPIO引脚的函数为`ftdi_gpio_request`,用于在使用前申请GPIO资源。
- priv->gc.get_direction: 设置获取GPIO引脚方向(输入或输出)的函数为`ftdi_gpio_direction_get`。
- priv->gc.direction_input: 设置将GPIO引脚配置为输入模式的函数为`ftdi_gpio_direction_input`。
- priv->gc.direction_output: 设置将GPIO引脚配置为输出模式的函数为`ftdi_gpio_direction_output`。
- priv->gc.init_valid_mask: 设置初始化有效掩码的函数为`ftdi_gpio_init_valid_mask`,用于确定哪些GPIO引脚可以被使用。
- priv->gc.get: 设置读取GPIO引脚状态的函数为`ftdi_gpio_get`。
- priv->gc.set: 设置设置GPIO引脚状态的函数为`ftdi_gpio_set`。
- priv->gc.get_multiple: 设置批量读取GPIO引脚状态的函数为`ftdi_gpio_get_multiple`。
- priv->gc.set_multiple: 设置批量设置GPIO引脚状态的函数为`ftdi_gpio_set_multiple`。
1.6.2.2 设置GPIO控制器的元信息
- priv->gc.owner: 设置拥有者为当前模块,表明这个GPIO控制器是由当前驱动程序管理的。
- priv->gc.parent: 设置父设备为`serial->interface->dev`,这通常是一个USB设备或串口设备,表明GPIO控制器与之关联。
- priv->gc.base: 设置GPIO引脚的起始编号为-1,实际值将在注册时由系统分配。
- priv->gc.can_sleep: 设置为`true`表示这个GPIO控制器可以在睡眠状态下工作。
1.6.3 GPIO实例
例如使用FT232H,使用FT_PROG设置AC9为I/O Mode

在Linux中可以看到多一个gpiochip512的文件夹
/sys/class/gpio$ ls
export gpiochip512 unexport
/sys/class/gpio/gpiochip512$ ls
base device label ngpio power subsystem uevent
/sys/class/gpio/gpiochip512$ cat label
ftdi-cbus
/sys/class/gpio/gpiochip512$ cat ngpio
4
/sys/class/gpio/gpiochip512$ cat base
512可以看到一共分配了4个gpio,因为AC9是第四个GPIO,所以其GPIO编号应该为512 + 3 = 515.
/sys/class/gpio# echo "515" > /sys/class/gpio/export
/sys/class/gpio# ls
export gpio515 gpiochip512 unexport注意,这里FT_PROG虽然只配置了一个GPIO,但是驱动层还是按照4个GPIO分配,如果暴露512可以看到返回错误:
/sys/class/gpio# echo "512" > /sys/class/gpio/export
bash: echo: 写入错误:无效的参数2. ftdi_gpio_remove
这个函数将gpio移除和释放内存。
相关文章:
ftdi_sio驱动学习笔记 3 - 端口操作
目录 1. ftdi_port_probe 1.1 私有数据结构ftdi_private 1.2 特殊probe处理 1.3 确定FTDI设备类型 1.4 确定最大数据包大小 1.5 设置读取延迟时间 1.6 初始化GPIO 1.6.1 使能GPIO 1.6.2 添加到系统 1.6.2.1 设置GPIO控制器的基本信息 1.6.2.2 设置GPIO控制器的元信息…...

[leetcode]39_组合总和_给定数组且数组可重复
给定一个无重复元素的数组 candidates 和一个目标数 target ,找出 candidates 中所有可以使数字和为 target 的组合。 candidates 中的数字可以无限制重复被选取。说明: 所有数字(包括 target)都是正整数。 解集不能包含重复的组合…...
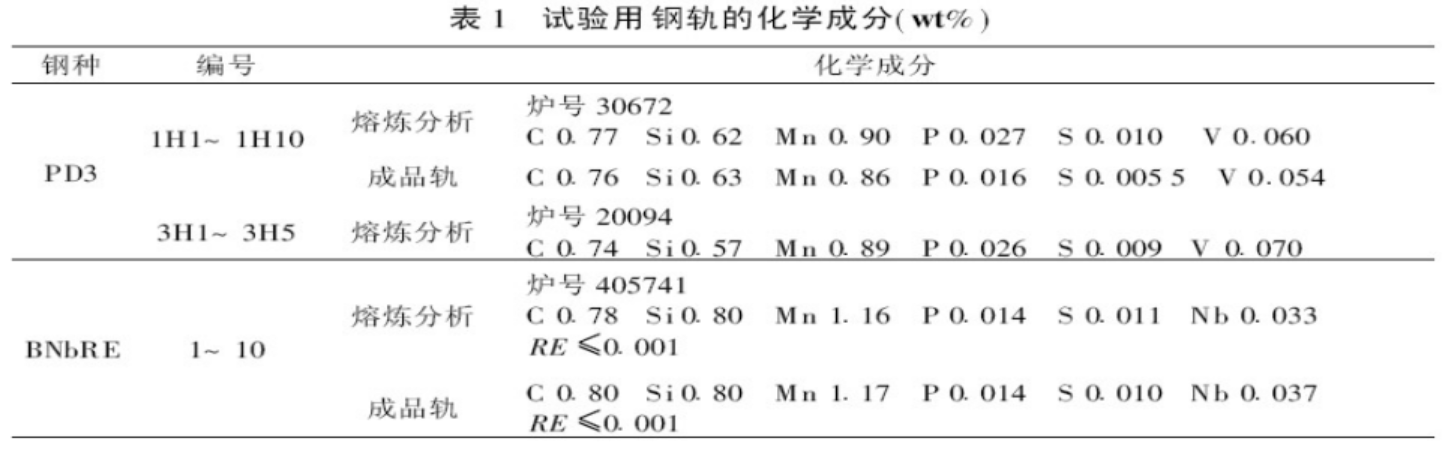
【笔记】第三节 组织与性能
3.1 基本成分 3.2 微观组织特征 0.6-0.8C%碳素钢的组织为珠光体和少量的铁素体。 如何把组织和性能联系起来?德国克虏伯公司的研究——珠光体片间距与渗碳体片层厚度成比例: t s 0 ( ρ 15 ( C % ) − 1 ) ts_0(\frac{\rho}{15(C\%)}-1) ts0(15(C%)…...

数据库——sql语言学习 查找语句
一、什么是sql SQL是结构化查询语言(Structured Query Language)的缩写,它是一种专门为数据库设计的操作命令集,用于管理关系数据库管理系统(RDBMS)。 二、查找相关语句 首先,我们已经设…...
)
【计算机网络 - 基础问题】每日 3 题(二十三)
✍个人博客:Pandaconda-CSDN博客 📣专栏地址:http://t.csdnimg.cn/fYaBd 📚专栏简介:在这个专栏中,我将会分享 C 面试中常见的面试题给大家~ ❤️如果有收获的话,欢迎点赞👍收藏&…...

JPA + Thymeleaf 增删改查
一、 什么是 Thymeleaf JPA(Java Persistence API):是一种用于对象关系映射(ORM)的 Java 规范,它简化了数据库操作,使开发者可以以面向对象的方式处理数据存储。通过定义实体类和数据访问接口&a…...

Android常用C++特性之std::this_thread
声明:本文内容生成自ChatGPT,目的是为方便大家了解学习作为引用到作者的其他文章中。 std::this_thread 是 C11 标准库中的一个命名空间,提供了一组与当前线程(即调用这些函数的线程)相关的操作。通过 std::this_threa…...
)
成语700词(31~45组)
目录 31.对待错误的态度(12 个)32.改变与不变(19 个)33.顺势造势(6 个)34.自然会发生(6 个)35.提早准备和补救(11 个)36.办公、管理相关(8 个)37.空谈与虚幻(8 个)38.来者众多(11 个)39.人多热闹(6)40.好坏掺杂(7 个)41.流行与名声(14 个)42.与传播、传闻…...

vue3组件通信(组合式API)
vue3组件通信(组合式API) vue3组件通信,采用组合式API。选项式API,参看官网 Vue3组件通信和Vue2的区别: 移出事件总线,使用mitt代替。 vuex换成了pinia。把.sync优化到了v-model里面了。把$listeners所…...

从预测性维护到智能物流:ARM边缘计算控制器的工业实践
工业4.0时代的到来,边缘计算技术成为连接物理世界与数字世界的桥梁。ARM架构的边缘计算控制器凭借其低功耗、高能效和灵活性等特点,在工业自动化领域展现出巨大潜力。本文将通过几个实际应用案例来探讨ARM边缘计算控制器是如何提升生产线效率和安全性的&…...
2024年汉字小达人区级自由报名备考冲刺:最新问题和官模题练一练
今天是2024年第十一届汉字小达人的区级自由报名活动的第二天。 我们继续回答几个关于汉字小达人的最新问题,做几道2024年官方模拟题,帮助孩子们少走弯路,再冲刺一般,更精准地备考2024年汉字小达人。 【温馨提示】本专题在比赛期…...

Linux相关概念和重要知识点(8)(操作系统、进程的概念)
1.操作系统(OS) (1)基本结构的认识 任何计算机系统都包含一个基本的程序集合,用于实现计算机最基本最底层的操作,这个软件称为操作系统。操作系统大部分使用C语言编写,少量使用汇编语言。 从…...
测序技术--组蛋白甲基化修饰、DNA亲和纯化测序,教授(优青)团队指导:从实验设计、结果分析到SCI论文辅助
组蛋白甲基化修饰工具(H3K4me3 ChIP-seq)组蛋白甲基化类型也有很多种,包括赖氨酸甲基化位点H3K4、H3K9、H3K27、H3K36、H3K79和H4K20等。组蛋白H3第4位赖氨酸的甲基化修饰(H3K4)在进化上高度保守,是被研究最多的组蛋白修饰之一。 DNA亲和纯化测序 DNA亲…...

Llama 3.2来了,多模态且开源!AR眼镜黄仁勋首批体验,Quest 3S头显价格低到离谱
如果说 OpenAI 的 ChatGPT 拉开了「百模大战」的序幕,那 Meta 的 Ray-Ban Meta 智能眼镜无疑是触发「百镜大战」的导火索。自去年 9 月在 Meta Connect 2023 开发者大会上首次亮相,短短数月,Ray-Ban Meta 就突破百万销量,不仅让马…...

软考高级:SOA 和微服务 AI 解读
概念讲解 SOA(面向服务架构)和微服务虽然都是服务架构的设计模式,但它们的侧重点和实现方式有很大区别。为了帮助你理解这两个概念,我们可以从生活中的例子、概念本身的讲解以及记忆方法三方面入手。 生活化例子 **SOA…...

【每天学个新注解】Day 6 Lombok注解简解(五)—@SneakyThrows
SneakyThrows 简化异常处理 并不建议日常开发中通过此注解解决异常捕获问题!!! 允许方法抛出检查型异常而无需显式声明或捕获这些异常。这对于那些不希望在方法签名中声明异常或不愿意编写复杂的 try-catch 块的场景非常有用。 使用 SneakyT…...

C语言 | Leetcode C语言题解之第437题路径总和III
题目: 题解: /*** Definition for a binary tree node.* struct TreeNode {* int val;* struct TreeNode *left;* struct TreeNode *right;* };*/ //递归遍历树节点,判断是否为有效路径 int dfs(struct TreeNode * root, int ta…...

Linux-TCP重传
问题描述: 应用系统进行切换,包含业务流量切换(即TongWeb主备切换)和MYSQL数据库主备切换。首先进行流量切换,然后进行数据库主备切换。切换后发现备机TongWeb上有两批次慢请求,第一批慢请求响应时间在133…...

Python通过Sqlalchemy框架实现增删改查
目录 简介 什么是SQLAlchemy? SQLAlchemy可以分为两个部分:Core和ORM。 一、首先安装sqlalchemy 二、在配置文件中添加数据库连接信息,我这里是Mysql 三、 创建数据库连接类,我这里是动态读取数据库的表字段,自动…...

windows C++ - 任务计划程序(并发运行时)
如果希望微调并发运行时的现有代码的性能,则任务计划程序会很有用。 无法从通用 Windows 平台 (UWP) 应用获取任务计划程序。 在 Visual Studio 2015 及更高版本中,concurrency::task 类和 ppltasks.h 中的相关类型使用 Windows 线程池作为其计划程序。…...

Linux高手必备:从安全操作到高效运维的12个核心习惯
1. 为什么说“习惯”是Linux高手的护城河刚接触Linux那会儿,我总觉得高手和菜鸟的区别在于记住了多少命令、会不会写复杂的脚本。后来踩了无数坑、熬了无数夜、甚至搞崩过几次生产环境后,我才恍然大悟:真正的分水岭,其实藏在那些日…...

Cyber Engine Tweaks终极指南:彻底优化你的赛博朋克2077游戏体验
Cyber Engine Tweaks终极指南:彻底优化你的赛博朋克2077游戏体验 【免费下载链接】CyberEngineTweaks Cyberpunk 2077 tweaks, hacks and scripting framework 项目地址: https://gitcode.com/gh_mirrors/cy/CyberEngineTweaks Cyber Engine Tweaks是一款专为…...

3步实现AutoHotkey脚本独立运行:Ahk2Exe编译工具完全指南
3步实现AutoHotkey脚本独立运行:Ahk2Exe编译工具完全指南 【免费下载链接】Ahk2Exe Official AutoHotkey script compiler - written itself in AutoHotkey 项目地址: https://gitcode.com/gh_mirrors/ah/Ahk2Exe 你是否厌倦了每次运行AutoHotkey脚本都需要安…...

AI智能体生态的包管理器:agenticmarket-cli 设计与实践
1. 项目概述:一个面向AI智能体生态的命令行工具如果你和我一样,长期在AI智能体(Agent)这个领域里折腾,那你肯定经历过这样的场景:为了测试一个最新的开源智能体框架,你需要先找到它的GitHub仓库…...

终极Python通达信数据解析方案:mootdx完整使用指南与金融量化实践
终极Python通达信数据解析方案:mootdx完整使用指南与金融量化实践 【免费下载链接】mootdx 通达信数据读取的一个简便使用封装 项目地址: https://gitcode.com/GitHub_Trending/mo/mootdx 在金融数据分析和量化交易领域,通达信作为国内主流的证券…...

QKeyMapper深度解析:现代输入设备管理系统的架构揭秘与实战指南
QKeyMapper深度解析:现代输入设备管理系统的架构揭秘与实战指南 【免费下载链接】QKeyMapper [按键映射工具] QKeyMapper,Qt开发Win10&Win11可用,不修改注册表、不需重新启动系统,可立即生效和停止。支持游戏手柄映射到键鼠&a…...

构建动态技能图谱:从数据模型到自动化可视化的完整实践
1. 项目概述:一个技能图谱的诞生最近在GitHub上看到一个挺有意思的项目,叫dortort/skills。乍一看,这只是一个个人仓库,但点进去你会发现,它远不止是一个简单的代码集合。它更像是一张动态的、可视化的个人技能地图&am…...

Gopeed下载器深度解析:从零开始构建你的全平台高速下载解决方案
Gopeed下载器深度解析:从零开始构建你的全平台高速下载解决方案 【免费下载链接】gopeed A fast, modern download manager for HTTP, BitTorrent, Magnet, and ed2k. Cross-platform, built with Golang and Flutter. 项目地址: https://gitcode.com/GitHub_Tre…...

Arm CoreLink PCK-600电源管理架构与寄存器编程详解
1. Arm CoreLink PCK-600电源控制架构解析在嵌入式系统设计中,电源管理单元(PMU)是实现高效能耗控制的核心组件。Arm CoreLink PCK-600作为业界领先的电源控制解决方案,其架构设计体现了现代SoC电源管理的先进理念。PCK-600系列采…...

药物发现自动化:FEP计算工作流引擎faah的设计原理与实战
1. 项目概述:一个面向药物发现的自动化工作流引擎 最近在药物研发的自动化工具领域,一个名为 kiron0/faah 的项目引起了我的注意。这并非一个简单的脚本集合,而是一个设计精巧、旨在为药物发现中的自由能微扰计算提供端到端自动化解决方案的…...