硬件设计很简单?合宙低功耗4G模组Air780E—开机启动及外围电路设计
Air780E是合宙低功耗4G-Cat.1模组经典型号之一,上期我们解答了大家关心的系列问题,并讲解了选型的注意要点。
有朋友问:能不能讲些硬件设计相关的内容?
模组的上电开机,是硬件设计调试的第一步。
本期特别分享——Air780E开机启动及外围电路设计。
Air780E开机启动及外围电路设计

合宙Air780E模组采用LGA封装,尺寸仅16*18*2.3mm,共有109个管脚。
Air780E开机正常启动所涉及到的管脚,如下图表所示:
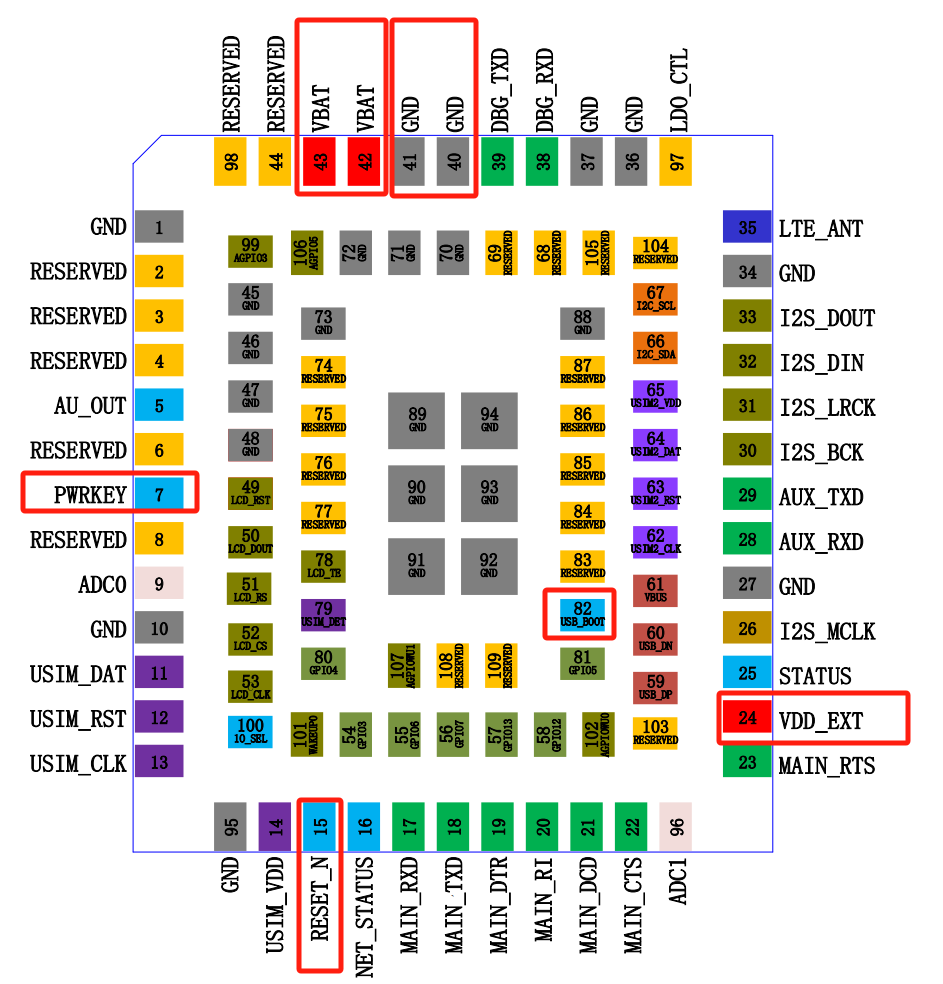

接下来,我们详细讲解模组开机的必要条件。
在实际应用开发中,Air780E模组要正常运行开机,需要如下几个必要条件:
一、VBAT供电管脚电压符合工作电压范围
1. 供电电压3.3V~4.3V
实际Air780E正常开机的电压范围,要大于规格书所给的工作范围,为3.1V~4.5V;但是实际使用中不建议超过3.3V~4.3V,避免射频指标恶化。
部分高压锂电池充满状态下,电压能达到4.35V~4.4V,虽然超过4.3V的建议电压最大值,但是请放心使用——因为满电工作时间较短,而且考虑电池内阻因素,到达模组芯片端的电压会低于4.3V。
2. 持续供电电流大于1A,瞬间供电电流大于2A
由于4G-Cat.1射频工作特性,在射频发射瞬间会产生脉冲电流,脉冲电流最大会高达1.5~2A,持续时间百uS级别。
若供电能力不够或者电源走线通路阻抗过高会引起VBAT供电电源跌落,严重时会造成周期性的反复重启。
-
电源的跌落,可以用示波器进行测量。切记不能用万用表。
-
可以从开机日志判断,比如用LuaTool通过链接Air780E的USB接口进行日志抓取,如果周期反复出现开机日志的打印,就可以考虑电源跌落原因。
-
通过串口打印判断(MAIN_TXD/MAIN_RXD),开机后周期性反复打印“RDY"字样。在使用AT版本情况下通过此判断。
3. VBAT供电纹波小于400mV(经验值)
由于4G-Cat.1射频工作特性,在射频工作时,很难保证VBAT供电的稳定不跌落。且在外部电源电路设计不合理的情况下(尤其是DCDCBUCK电源),都会在VBAT电源上存在抖动和纹波。
从经验来看,若跌落和纹波小于400mv的情况下不会对模组工作产生影响;但如果高于此范围,会有射频恶化的风险,以及低电压掉电重启的风险。
如果优化,除了优化供电设计外,可以在VBAT管脚附近加大电容来减小纹波。官方参考设计推荐1000uf,比较保守,实际产品由于小型化或其他空间原因可以按照实际情况减小此电容的容值,以减小空间。那如果空间允许,建议无脑加上,增加系统健壮性。
二、开机管脚PWRKEY(7pin)触发开机动作
Air780E模组不同于通常的MCU的上电开机,Air780E模组开机需要触发开机事件,也就是PWRKEY管脚拉低(拉低时间>1秒),触发开机。
PWRKEY管脚只要VBAT管脚电压大于3.1V时就会为高,而且是内部拉高。
注意:PWRKEY外部不能有任何上拉电路,否则会出现系统启动的不稳定风险。
推荐如下几种开机方式:
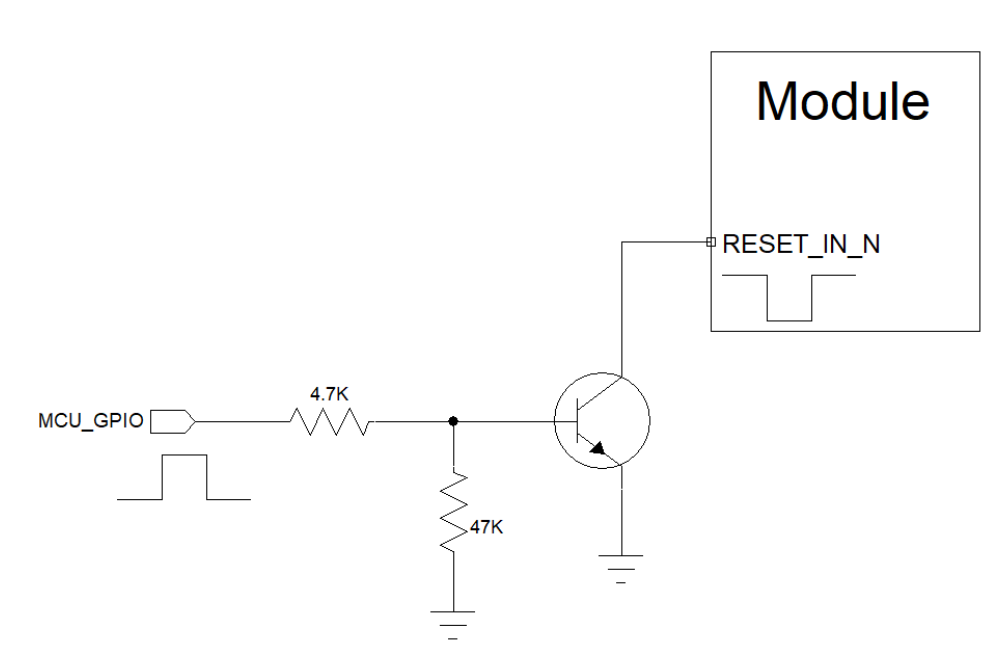
1. 开集驱动开机电路
适合由主控MCUio口控制模组开机的方式:
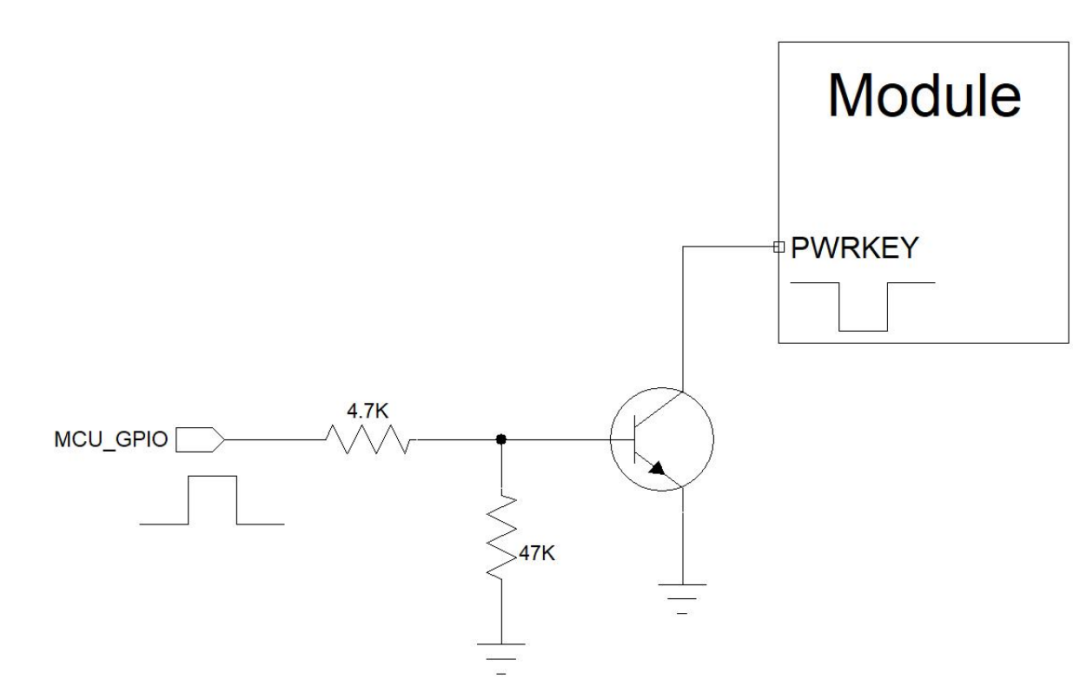
特别注意:
三极管靠近模组放置,而且三极管集电极和PWRKEY之间无需串联电阻(模组内部已经串联5.6K电阻)。
2. 按键开机方式
适合于Air780E做主控的方式,比如open二次开发方式:
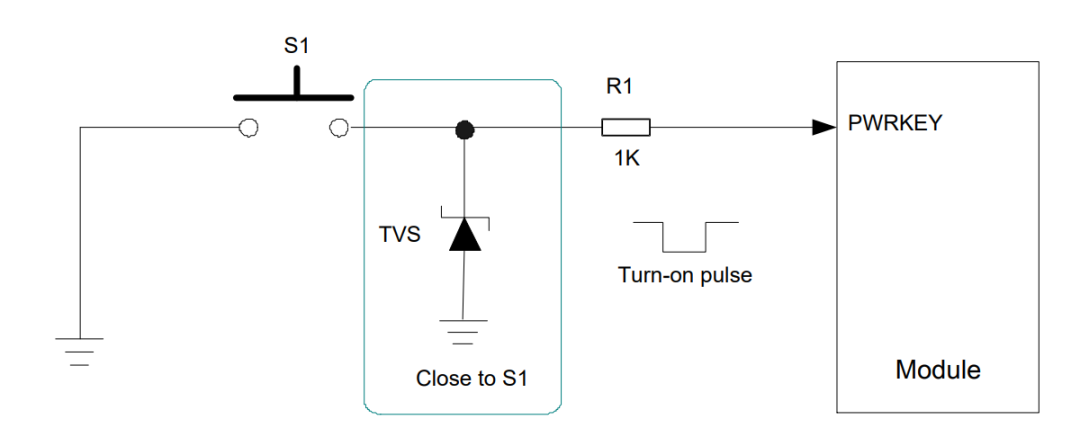
特别注意:
由于按键机械接触的方式,容易产生尖峰电压,还是建议做TVS防护,比如加TVS管。
TVS管的选型上并没有太严格的要求,以通用和成本做考虑,可以选择工作电压5V的TVS。
比如:
PESDNC2FD5VU(芯导)
ESD5311N2/TR(韦尔)
PESD5V0S1BLN(伯恩半导体)
3. PWRKEY接地方式
虽然Air780E不支持上电启动开机的方式,但是可以将PWRKEY直接接地的方式来变相实现上电开机的目的。
但是这种方式有个缺点:
毕竟是硬件实现的上电开机,会导致模组VBAT电压在关机电压临界点时(比如用电池供电,低电量情况下),会出现反复上电开关机的情况,进一步将电池放电。
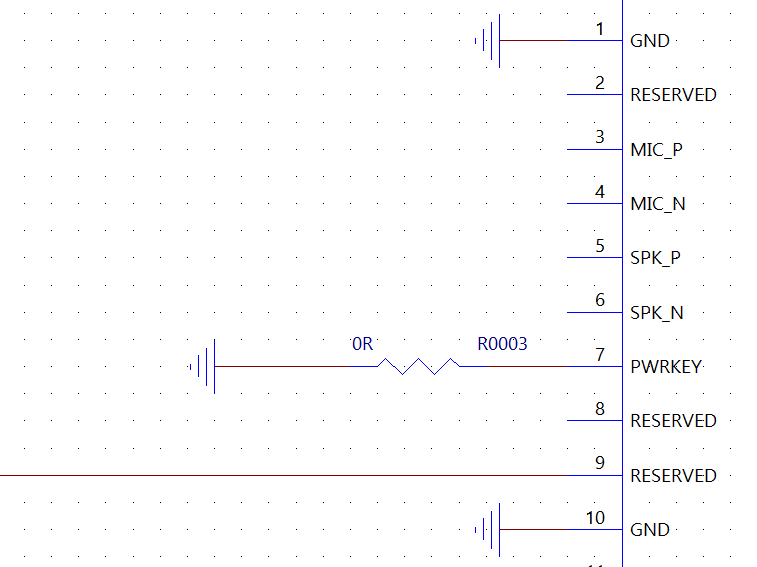
特别注意:
上图PWRKEY串联0欧姆只是为了调试方便进行预留,直接PWRKEY接也不会有问题。
三、复位管脚RESET_N处于释放状态(没有被外部拉低)
复位管脚RESET_N为硬件关机功能,(并不能直接让模组重启)在复位管脚拉低(拉低时间建议大于500ms)关机后,还需要PWERKEY触发开机动作。当然如果采用的是PWRKEY接地方式,操作RESET_N也能变相实现模组复位重启的效果。
RESET_N管脚与PWRKEY管脚类似,由模组内部拉高,禁止任何形式的外部拉高。
如若RESET_N管脚一直被外部拉低且不被释放,模组则一直处于复位状态,不能正常启动,因此复位管脚也要作为模组不启动的排查对象。
RESET_N也有如下几种操作方式:
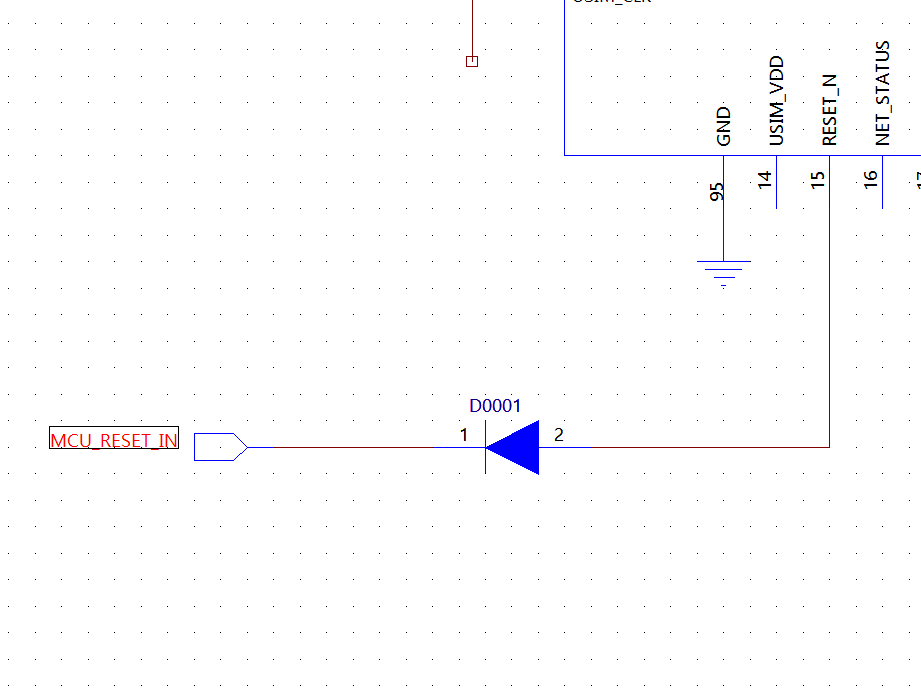
特别注意:
如果PCB上RESET_N走线台词,建议在靠近模组端预留对地的100pf滤波电容。
四、USB_BOOT管脚处于悬空或拉低状态
USB_BOOT是模组进入下载模式的控制管脚,必须在模组开机启动时USB_BOOT管脚处于高状态(通常会用VDD_EXT管脚来拉高),才会让系统进入下载模式。
进入下载模式后,不会响应外部AT指令。误入下载模式后,会容易误认为不开机。
今天的分享就到这里了~
大家在实际应用中如果遇到模组开机问题,可以参考以上开机条件进行逐一排查。在前期设计接地,也要根据这些要求来优化外部电路设计(尤其是电源部分)。
相关文章:
硬件设计很简单?合宙低功耗4G模组Air780E—开机启动及外围电路设计
Air780E是合宙低功耗4G-Cat.1模组经典型号之一,上期我们解答了大家关心的系列问题,并讲解了选型的注意要点。 有朋友问:能不能讲些硬件设计相关的内容? 模组的上电开机,是硬件设计调试的第一步。 本期特别分享——Ai…...

初试AngularJS前端框架
文章目录 一、框架概述二、实例演示(一)创建网页(二)编写代码(三)浏览网页(四)运行结果 三、实战小结 一、框架概述 AngularJS 是一个由 Google 维护的开源前端 JavaScript 框架&am…...

【学习笔记】手写 Tomcat 六
目录 一、线程池 1. 构建线程池的类 2. 创建任务 3. 执行任务 测试 二、URL编码 解决方案 测试 三、如何接收客户端发送的全部信息 解决方案 测试 四、作业 1. 了解工厂模式 2. 了解反射技术 一、线程池 昨天使用了数据库连接池,我们了解了连接池的优…...
打靶记录18——narak
靶机: https://download.vulnhub.com/ha/narak.ova 推荐使用 VM Ware 打开靶机 难度:中 目标:取得 root 权限 2 Flag 攻击方法: 主机发现端口扫描信息收集密码字典定制爆破密码Webdav 漏洞PUT 方法上传BF 语言解码MOTD 注入CVE-2021-3…...

LabVIEW编程能力如何能突飞猛进
要想让LabVIEW编程能力实现突飞猛进,需要采取系统化的学习方法,并结合实际项目进行不断的实践。以下是一些提高LabVIEW编程能力的关键策略: 1. 扎实掌握基础 LabVIEW的编程本质与其他编程语言不同,它是基于图形化的编程方式&…...

代码随想录算法训练营第四四天| 1143.最长公共子序列 1035.不相交的线 53. 最大子序和 392.判断子序列
今日任务 1143.最长公共子序列 1035.不相交的线 53. 最大子序和 392.判断子序列 1143.最长公共子序列 题目链接: . - 力扣(LeetCode) class Solution {public int longestCommonSubsequence(String text1, String text2) {int[][] dp ne…...

2024.9.26 作业 +思维导图
一、作业 1、什么是虚函数?什么是纯虚函数 虚函数:函数前加关键字virtual,就定义为虚函数,虚函数能够被子类中相同函数名的函数重写 纯虚函数:把虚函数的函数体去掉然后加0;就能定义出一个纯虚函数。 2、基…...
WSL进阶体验:gnome-terminal启动指南与中文显示问题一网打尽
起因 我们都知道 wsl 启动后就死一个纯命令行终端,一直以来我都是使用纯命令行工具管理Linux的。今天看到网上有人在 wsl 中启动带图形界面的软件。没错,就是在wsl中启动带有图形界面的Linux软件。比如下面这个编辑器。 出于好奇,我就…...

recoil和redux之间的选择
Recoil 和 Redux 是两个流行的 JavaScript 状态管理库,它们各自有不同的设计理念和使用场景。选择哪一个更好用,取决于你的具体需求、项目规模和个人偏好。 1. 设计理念 Redux 单向数据流:Redux 采用单向数据流模型,所有的状态变…...

无人机的作战指挥中心-地面站!
无人机与地面站的关系 指挥与控制:地面站是无人机系统的核心控制部分,负责对无人机进行远程指挥和控制。无人机根据地面站下达的任务自主完成飞行任务,并实时向地面站反馈飞行状态和任务执行情况。 任务规划与执行:地面站具备任…...
)
Vue 23进阶面试题:(第八天)
目录 29.vue2.0和vue3.0区别? 30.事件中心的原理 31.使用基于token的登录流程 32.防抖和节流 防抖(debounce) 节流(throttle) 29.vue2.0和vue3.0区别? 1.由选项API转变为组合API。 2.vue3将全局配置…...

Acwing 最小生成树
最小生成树 最小生成树:由n个节点,和n-1条边构成的无向图被称为G的一棵生成树,在G的所有生成树中,边的权值之和最小的生成树,被称为G的最小生成树。(换句话说就是用最小的代价把n个点都连起来) Prim 算法…...

VIM简要介绍
安装 大多数 Linux 发行版和 macOS 都预装了 VIM。如果没有,你可以通过包管理器安装: Ubuntu/Debian: sudo apt-get install vimFedora: sudo dnf install vimmacOS: brew install vim(使用 Homebrew)Windows: 可以从 VIM 官网下…...

.NET 6.0 使用log4net配置日志记录方法
1.包管理器引入相关包 2.添加Log4net文件夹和log4net.config配置文件(配置文件属性设为始终复制)。 3.替换 log4net.config的内容(3.1与3.2选择一个就好,只是创建日志文件有所区别) 3.1: <?xml version"1.0" encoding"utf-8"?> <configuration…...

Unity角色控制及Animator动画切换如走跑跳攻击
Unity角色控制及 Animator动画切换如走跑跳攻击 目录 Unity角色控制及 一、 概念 1、角色控制 1) CharacterController(角色控制器) 2) CapsuleCollider + Rigidbody(使用物理刚体控制) 2、角色动画-Animation、Animator 1) 旧版动画系统...

JSP+Servlet+Mybatis实现列表显示和批量删除等功能
前言 使用JSP回显用户列表,可以进行批量删除(有删除确认步骤),和修改用户数据(用户数据回显步骤)使用servlet处理传递进来的请求参数,并调用dao处理数据并返回使用mybatis,书写dao层…...

Cannot read properties of undefined (reading ‘upgrade‘)
前端开发工具:VSCODE 报错信息: INFO Starting development server...10% building 2/2 modules 0 active ERROR TypeError: Cannot read properties of undefined (reading upgrade)TypeError: Cannot read properties of undefined (reading upgrade…...

javaJUC基础
JUC基础知识 多线程 管程 Monitor,也就是平时所说的锁。Monitor其实是一种同步机制,它的义务是保证(同一时间)只有一个线程可以访问被保护的数据和代码块,JVM中同步是基于进入和退出监视器(Monitor管程对…...

std::distance 函数介绍
std::distance 是 C 标准库中的一个函数模板,用于计算两个迭代器之间的距离。它的主要作用是返回从第一个迭代器到第二个迭代器之间的元素数量。这个函数对于不同类型的迭代器(如随机访问、双向、前向等)都能有效工作。 函数原型 template …...

如何在Windows和Linux之间实现粘贴复制
第一步 sudo apt-get autorremove open-vm-tools第二步 sudo apt-get update第三步 sudo apt-get install open-vm-tools-desktop第四步 一直按Y,希望执行 Y第四步 重启 reboot然后可以实现粘贴复制。...

TouchGFX SPI屏移植避坑全记录:从下载算法到分散加载.sct文件
TouchGFX SPI屏移植实战:破解下载算法与分散加载的三大技术难点 当一块240x320的SPI接口屏幕在STM32F412RET6上流畅渲染出60帧的TouchGFX界面时,我盯着示波器上稳定的时序信号长舒一口气——这已经是本周第三次重写W25Q64的下载算法。与官方文档描述的&…...

AI技能框架实战:构建可扩展的智能体工具调用系统
1. 项目概述:当AI技能成为你的私人助理 最近在折腾AI应用开发的朋友,可能都绕不开一个核心问题:如何让大语言模型(LLM)不只是个“聊天高手”,而是能真正帮你处理具体事务的“实干家”?比如&…...

终极硬件调优指南:如何用UXTU免费解锁电脑隐藏性能
终极硬件调优指南:如何用UXTU免费解锁电脑隐藏性能 【免费下载链接】Universal-x86-Tuning-Utility Unlock the full potential of your Intel/AMD based device. 项目地址: https://gitcode.com/gh_mirrors/un/Universal-x86-Tuning-Utility 还在为电脑性能…...

WinFlexBison深度解析:Windows平台编译工具链的完整解决方案
WinFlexBison深度解析:Windows平台编译工具链的完整解决方案 【免费下载链接】winflexbison Main winflexbision repository 项目地址: https://gitcode.com/gh_mirrors/wi/winflexbison 在Windows平台上开发编译器、解释器或复杂文本解析器时,开…...

SoC设计全流程解析:从架构到流片的核心步骤与挑战
1. 项目概述:从“黑盒子”到“城市蓝图”每次拿起手机,我们都在与一个极其复杂的微型“城市”互动。这个城市,就是SoC。对于很多刚入行的朋友,甚至是一些有经验的软件工程师来说,SoC常常像一个“黑盒子”——我们知道它…...
)
迪文屏DGUS数据自动上传死活没数据?手把手教你排查串口2无响应的三大坑(附8283协议全功能例程)
迪文屏DGUS串口无响应终极排查指南:从硬件焊点到协议配置的深度解析 当你的迪文屏按照手册配置了自动上传功能,却发现串口助手始终一片空白时,那种挫败感每个嵌入式开发者都深有体会。本文将从三个最容易被忽视的致命细节出发,带你…...

Chat-with-NeRF:三维场景重建与对话式AI的融合实践
1. 项目概述:当NeRF遇见对话式AI最近在三维视觉和AIGC的交叉领域,一个名为“chat-with-nerf”的项目引起了我的注意。简单来说,它实现了一个听起来很科幻的功能:你上传一张或多张照片,系统会基于这些照片重建出一个三维…...

HoRain云--VS Code 创建与使用 Skill
🎬 HoRain 云小助手:个人主页 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个超棒的服务器购买网站,性价比超高,大内存超划算!忍不住分享一下给大家。点击跳转到网站。 目录 ⛳️ 推荐 …...

阿里图像复原验证码识别
一、简介 这个就是阿里的图像还原验证码,他是从一个图片中任意抠出一个物品,可能是蜡烛、车轮、盘子、瓶子、盖子、扣子等等。然后让你通过鼠标拖动的方式,把物品拖到对应的位置上,完成图像复原验证。 这个验证码还有一个非常变态…...

深入解析Enso:构建高性能可编程代理与API网关的Go框架
1. 项目概述:一个被低估的“瑞士军刀”如果你在开源社区里混迹过一段时间,大概率见过这样的场景:一个项目仓库,名字起得挺酷,比如“Enso”,简介里写着“一个现代化的代理工具”,但点进去一看&am…...