HumanNeRF:Free-viewpoint Rendering of Moving People from Monocular Video 精读
1. 姿态估计和骨架变换模块
-
人体姿态估计:HumanNeRF 通过已知的单目视频对视频中人物的姿态进行估计。常见的方法是通过人体姿态估计器(如 OpenPose 或 SMPL 模型)提取人物的骨架信息,获取 3D 关节的位置信息。这些关节信息可以帮助建模每一帧视频中人物的骨架姿态。
-
骨架绑定和变换:通过这些 3D 关节信息,系统能够计算出骨架在不同帧中如何变化。HumanNeRF 通过骨架绑定(rigging)的方式,将骨架姿态与人体的点云或体积绑定在一起。这样,在每一帧中,人体表面的点会根据骨架的运动进行相应的变换。
2. 规范空间(Canonical Space)模块
-
规范姿态建模:在 HumanNeRF 中,人物的几何形态被标准化为 规范姿态,例如 T-pose。规范姿态是一个无论人体如何运动和变形,都会映射到的标准几何形态。在训练过程中,NeRF 会学习如何将不同姿态下的采样点映射回这个规范姿态。
-
从规范空间到动态姿态的映射:当系统估计出规范姿态后,HumanNeRF 会通过学习一个 运动场(Motion Field) 来将规范姿态中的人体点转换到目标姿态(视频中实际拍摄的姿态)。这个映射使得模型能够处理人物的姿态变换,并生成一致的几何形态。
3. 非刚性运动场(Non-Rigid Motion Field)模块
- 处理人物的非刚性运动:HumanNeRF 还需要处理人物的非刚性运动,比如人体的肌肉、衣物、皮肤等随姿态变换时产生的局部变化。为了建模这些变化,HumanNeRF 通过 非刚性运动场(Non-Rigid Motion Field) 来估计不同姿态下的细微变化。
- MLP 模型:为了计算出从规范姿态到目标姿态的非刚性运动偏移,HumanNeRF 使用了一个多层感知机(MLP)模型。这个 MLP 接收人物的骨架姿态信息以及位置嵌入(Positional Embedding),并输出人体各个部位的非刚性偏移,从而动态调整人物的表面形态。
4. NeRF 渲染模块
- 视角转换与体积渲染:HumanNeRF 使用 NeRF 的方式对人物进行渲染。NeRF 的原理是将射线投射到三维空间中,利用体积渲染(Volume Rendering)计算射线经过的体素点的颜色和密度。HumanNeRF 将渲染的过程分为两步:
- 从规范姿态进行采样:首先在规范空间下进行采样,生成对应点的颜色和密度。
- 映射到动态姿态:再通过运动场和非刚性运动场将规范姿态下的采样点映射到目标姿态,并生成对应的动态人物渲染结果。
- 自由视角渲染:通过这个过程,系统可以生成任何视角下的视频帧,甚至是原始摄像机没有拍摄到的视角。这使得 HumanNeRF 实现了 自由视角渲染 的目标。
5. 时序一致性(Temporal Consistency)模块
-
时序一致性处理:为了确保渲染出的动态人物在时间上具有一致性(例如防止物体“抖动”或“跳动”),HumanNeRF 还专门处理了时序一致性问题。它通过在多个时间帧之间建立关联来保证每个时间步的渲染结果都能平滑过渡。
-
帧间优化:HumanNeRF 通过帧间一致性优化,使得模型在进行自由视角渲染时,不仅要在单帧内生成高质量的结果,还要保证相邻帧之间的渲染具有连贯性。
6. 训练与优化模块
-
监督学习:HumanNeRF 使用监督学习方法,通过大量的单目视频帧和对应的姿态标签进行训练。模型通过将不同姿态下的点映射到规范空间,再渲染回目标姿态,逐渐学习如何正确地对人物进行渲染。
-
损失函数:HumanNeRF 的训练过程可能包含多种损失函数,通常包括:
- 颜色损失:衡量渲染出的颜色与真实视频中的颜色差异。
- 几何一致性损失:确保在不同视角下渲染的几何形态保持一致。
- 时序一致性损失:防止渲染出的动态视频在时间序列上不稳定。
7. 自由视角动态渲染(Free-viewpoint Dynamic Rendering)
HumanNeRF 的最终目标是生成自由视角的动态渲染效果,尤其是在单目视频的约束下。通过对规范姿态、骨架运动、非刚性运动的结合,HumanNeRF 可以在输入单目视频的基础上,渲染出从不同视角观察到的动态人物。
相关文章:

HumanNeRF:Free-viewpoint Rendering of Moving People from Monocular Video 精读
1. 姿态估计和骨架变换模块 人体姿态估计:HumanNeRF 通过已知的单目视频对视频中人物的姿态进行估计。常见的方法是通过人体姿态估计器(如 OpenPose 或 SMPL 模型)提取人物的骨架信息,获取 3D 关节的位置信息。这些关节信息可以帮…...

Springboot中基于注解实现公共字段自动填充
1.使用场景 当我们有大量的表需要管理公共字段,并且希望提高开发效率和确保数据一致性时,使用这种自动填充方式是很有必要的。它可以达到一下作用 统一管理数据库表中的公共字段:如创建时间、修改时间、创建人ID、修改人ID等,这些…...

Android 已经过时的方法用什么新方法替代?
过时修正举例 (Kotlin): getColor(): resources.getColor(R.color.white) //已过时// 修正后:ContextCompat.getColor(this, R.color.white) getDrawable(): resources.getDrawable(R.mipmap.test) //已过时//修正后:ContextCompat.getDrawable(this, R.mipmap.test) //…...

【RocketMQ】MQ与RocketMQ介绍
🎯 导读:本文介绍了消息队列(MQ)的基本概念及其在分布式系统中的作用,包括实现异步通信、削峰限流和应用解耦等方面的优势,并对ActiveMQ、RabbitMQ、RocketMQ及Kafka四种MQ产品进行了对比分析,涵…...
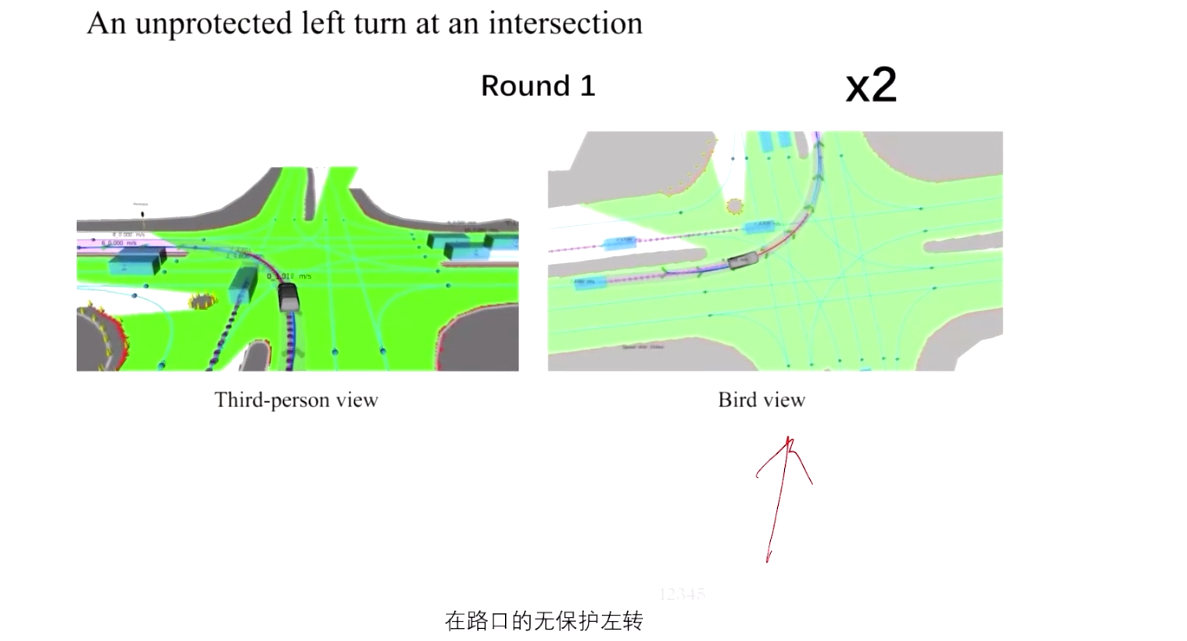
【笔记】自动驾驶预测与决策规划_Part4_时空联合规划
文章目录 0. 前言1. 时空联合规划的基本概念1.1 时空分离方法1.2 时空联合方法 2.基于搜索的时空联合规划 (Hybrid A* )2.1 基于Hybrid A* 的时空联合规划建模2.2 构建三维时空联合地图2.3 基于Hybrid A*的时空节点扩展2.4 Hybrid A* :时空节…...

Linux指令收集
文件和目录操作 ls: 列出目录内容。 -l 显示详细信息。-a 显示隐藏文件(以.开头的文件)。cd: 改变当前工作目录。 cd ~ 返回主目录。cd .. 上移一级目录。pwd: 显示当前工作目录。mkdir: 创建目录。 mkdir -p path/to/directory 创建多级目录。rmdir: 删…...
)
《C++并发编程实战》笔记(五)
五、内存模型和原子操作 5.1 C中的标准原子类型 原子操作是不可分割的操作,它或者完全做好,或者完全没做。 标准原子类型的定义在头文件<atomic>中,类模板std::atomic<T>接受各种类型的模板实参,从而创建该类型对应…...
)
在Python中实现多目标优化问题(5)
在Python中实现多目标优化问题 在Python中实现多目标优化,除了传统的进化算法(如NSGA-II、MOEA/D)和机器学习辅助的方法之外,还有一些新的方法和技术。以下是一些较新的或较少被提及的方法: 1. 基于梯度的多目标优化…...
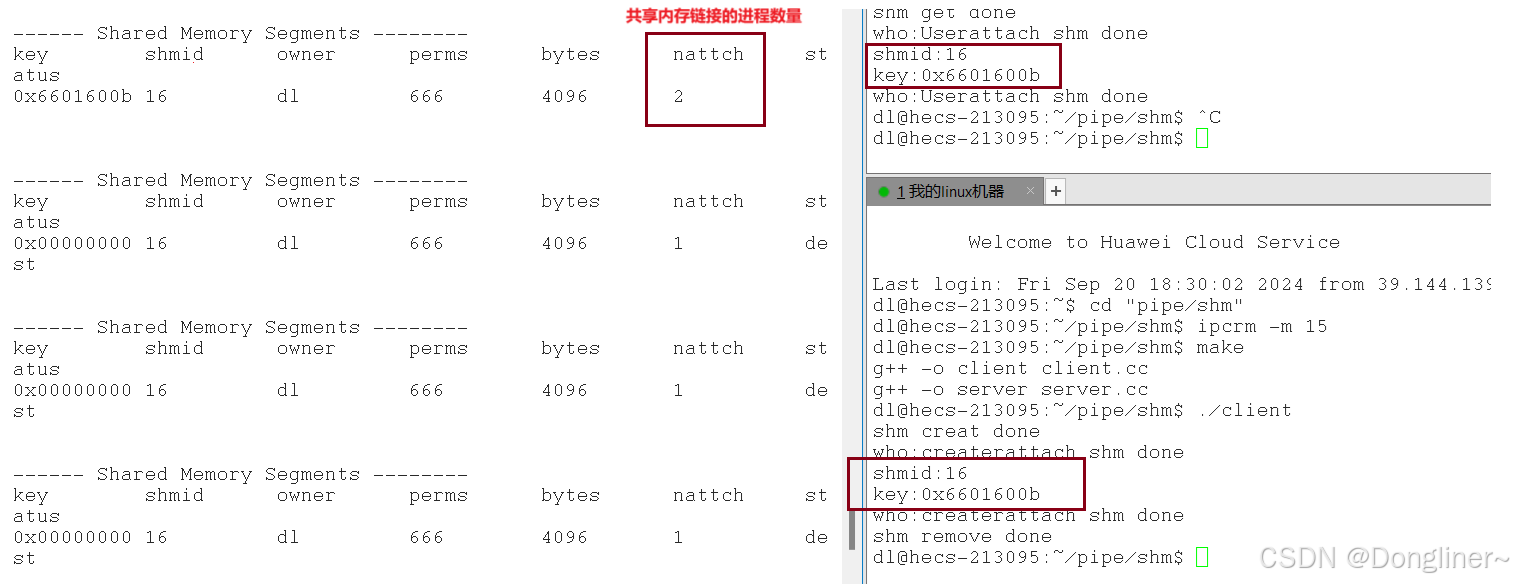
【Linux:共享内存】
共享内存的概念: 操作系统通过页表将共享内存的起始虚拟地址映射到当前进程的地址空间中共享内存是由需要通信的双方进程之一来创建但该资源并不属于创建它的进程,而属于操作系统 共享内存可以在系统中存在多份,供不同个数,不同进…...

今年Java回暖了吗
今年回暖了吗 仅结合师兄和同学的情况 BG 大多双非本 少部分211本 985硕 去年十月一之前 基本转正都失败 十月一之前0 offer 只有很少的人拿到美团 今年十月一之前 有HC的基本都转正了(美团、字节等),目前没有HC的说也有机会(…...

a = Sw,其中a和w是向量,S是矩阵,求w等于什么?w可以写成关于a和S的什么样子的公式
给定公式: a S w a S w aSw 其中: a a a 是已知向量, S S S 是已知矩阵, w w w 是未知向量。 我们的目标是求解 w w w,即将 w w w 表示为 a a a 和 S S S 的函数。 情况 1:矩阵 S S S 可逆 如果矩…...

多线程事务管理:Spring Boot 实现全局事务回滚
多线程事务管理:Spring Boot 实现全局事务回滚 在日常开发中,我们常常会遇到需要在多线程环境下进行数据库操作的场景。这类操作的挑战在于如何保证多个线程中的数据库操作要么一起成功,要么一起失败,即 事务的原子性。尤其是在多个线程并发执行的情况下,确保事务的一致性…...
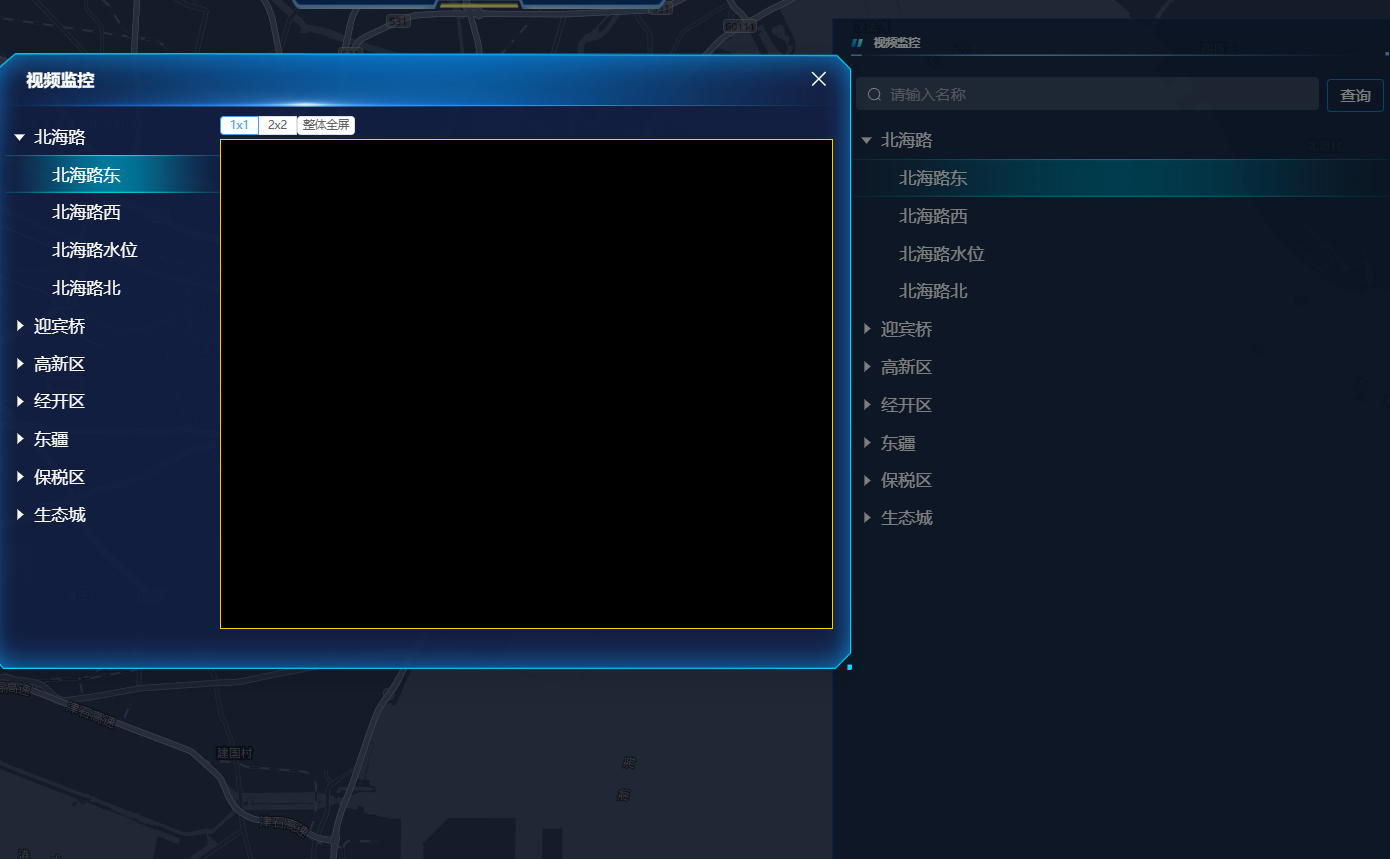
Vue3 中集成海康 H5 监控视频播放功能
🌈个人主页:前端青山 🔥系列专栏:Vue篇 🔖人终将被年少不可得之物困其一生 依旧青山,本期给大家带来Vuet篇专栏内容:Vue-集成海康 H5 监控视频播放功能 目录 一、引言 二、环境搭建 三、代码解析 子组件部分 1.…...

Linux: eBPF: libbpf-bootstrap-master 编译
文章目录 简介编译运行展示输出展示:简介 这个是使用libbpf的一个例子; 编译 如果是一个可以联网的机器,这个libbpf-bootstrap的编译就方便了,完全是自动化的下载依赖文件;如果没有,就只能自己准备这些个软件。 需要:libbpf-static; [root@RH8-LCP c]# makeLIB …...
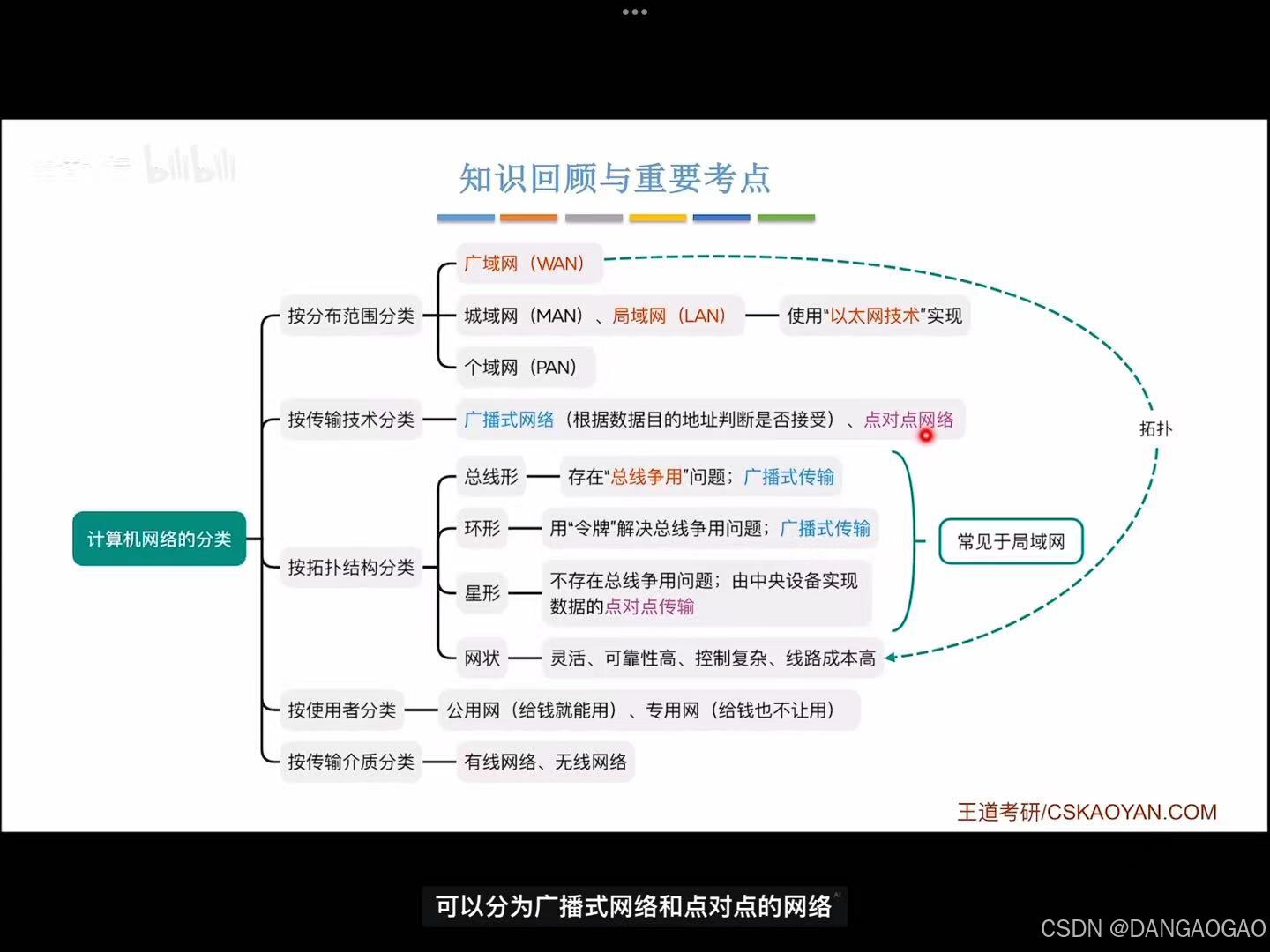
1.1.4 计算机网络的分类
按分布范围分类: 广域网(wan) 城域网(man) 局域网(lan) 个域网(pan) 注意:如今局域网几乎采用“以太网技术实现”,因此“以太网”几乎成了“局域…...

周家庄智慧旅游小程序
项目概述 周家庄智慧旅游小程序将通过数字化手段提升游客的旅游体验,依托周家庄的自然与文化资源,打造智慧旅游新模式。该小程序将结合虚拟现实(VR)、增强现实(AR)和人工智能等技术,提供丰富的…...

【在Linux世界中追寻伟大的One Piece】命名管道
目录 1 -> 命名管道 1.1 -> 创建一个命名管道 1.2 -> 匿名管道与命名管道的区别 1.3 -> 命名管道的打开规则 1.4 -> 例子 1 -> 命名管道 管道应用的一个限制就是只能在具有共同祖先(具有亲缘关系)的进程间通信。如果我们想在不相关的进程之间交换数据&…...
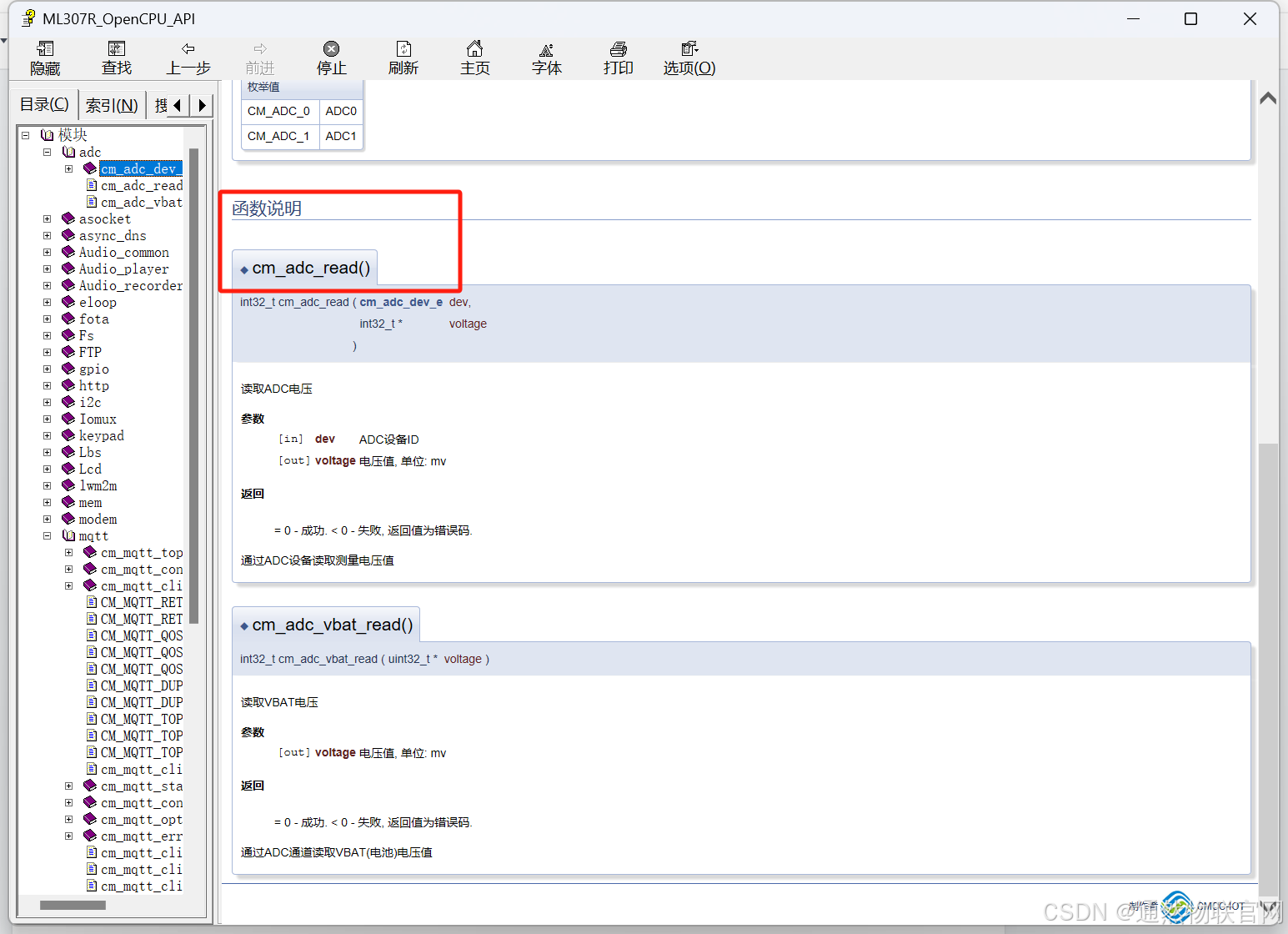
如意控物联网项目-ML307R模组软件及硬件调试环境搭建
软件及硬件调试环境搭建 1、 软件环境搭建及编译 a) 打开官方SDK,内涵APP-DEMO,通过vscode打开程序, 软件程序编写及编译参考下边说明文档链接 OneMO线上服务平台 编译需预安装python3.7以上版本,安装完python后,打开…...

大模型分布式训练并行技术(九)-总结
近年来,随着Transformer、MOE架构的提出,使得深度学习模型轻松突破上万亿规模参数,传统的单机单卡模式已经无法满足超大模型进行训练的要求。因此,我们需要基于单机多卡、甚至是多机多卡进行分布式大模型的训练。 而利用AI集群&a…...

uniapp view设置当前view之外的点击事件
推荐学习文档 golang应用级os框架,欢迎stargolang应用级os框架使用案例,欢迎star案例:基于golang开发的一款超有个性的旅游计划app经历golang实战大纲golang优秀开发常用开源库汇总想学习更多golang知识,这里有免费的golang学习笔…...
)
别再乱接电阻了!手把手教你为DDR4/DDR5内存信号选对端接方案(附仿真对比)
别再乱接电阻了!手把手教你为DDR4/DDR5内存信号选对端接方案(附仿真对比) 第一次调试DDR5内存接口时,我盯着示波器上扭曲的信号波形整整三天没合眼。当我把串联端接电阻从22Ω换成39Ω的瞬间,眼图突然像被施了魔法一样…...

TTS-Backup:Tabletop Simulator数据备份与资源管理的技术解决方案
TTS-Backup:Tabletop Simulator数据备份与资源管理的技术解决方案 【免费下载链接】tts-backup Backup Tabletop Simulator saves and assets into comprehensive Zip files. 项目地址: https://gitcode.com/gh_mirrors/tt/tts-backup 在数字桌游时代&#x…...

Zotero茉莉花插件:3大核心功能彻底解决中文文献管理难题
Zotero茉莉花插件:3大核心功能彻底解决中文文献管理难题 【免费下载链接】jasminum A Zotero add-on to retrive CNKI meta data. 一个简单的Zotero 插件,用于识别中文元数据 项目地址: https://gitcode.com/gh_mirrors/ja/jasminum 还在为Zotero…...

Apache SeaTunnel 4 月有何新动作?连接器增强与 Zeta 稳定性提升等亮点速览
在技术领域,我们常常被那些闪耀的、可见的成果所吸引。今天,这个焦点无疑是大语言模型技术。它们的流畅对话、惊人的创造力,让我们得以一窥未来的轮廓。然而,作为在企业一线构建、部署和维护复杂系统的实践者,我们深知…...
)
STM32+RS485实战:用Modbus RTU协议读取液压传感器数据(附自动收发电路避坑)
STM32与RS485实战:从电路设计到Modbus RTU协议解析 液压传感器数据采集在工业自动化领域有着广泛应用,而RS485总线因其抗干扰能力强、传输距离远等优势成为首选通信方式。本文将深入探讨如何基于STM32微控制器搭建RS485硬件电路,并通过Modbus…...

别再手动敲数据了!SAS PROC IMPORT保姆级教程:从Excel、CSV到TXT文件一键导入
SAS数据导入革命:用PROC IMPORT告别低效手工操作 1. 为什么你需要掌握PROC IMPORT? 每天早晨9点,刚入职的数据分析师小李都会面临同样的噩梦——业务部门发来的几十份Excel、CSV和TXT文件堆满了邮箱。手动复制粘贴不仅耗时费力,还…...

OpenOCD实战:从源码编译到JTAG调试RISC-V平台
1. OpenOCD与RISC-V调试基础 第一次接触OpenOCD调试RISC-V芯片时,我对着开发板上的JTAG接口发了半天呆。作为嵌入式开发者,我们都经历过这种从零搭建调试环境的阵痛期。OpenOCD就像一位硬件调试的瑞士军刀,它能通过JTAG接口与各种处理器架构对…...

2026十大建议考的经济学专业证书有哪些
2026年十大经济学专业证书推荐经济学专业证书能够提升职业竞争力,尤其在数据分析、金融和经济预测领域。以下是2026年值得考取的十大经济学专业证书,包括CDA数据分析师证书等热门选择。1. CDA数据分析师证书CDA数据分析师证书是数据分析领域的权威认证&a…...

运维实战:ESXi主机物理网卡闪断致部分VM网络中断的排查与应急恢复
1. 故障现象与初步判断 那天凌晨2点15分,值班手机突然响起刺耳的告警声。监控系统显示,ESXi主机上的三台关键业务虚拟机网络连接中断,而其他虚拟机却运行正常。这种部分VM断网的情况立刻引起了我的警觉——这通常意味着问题出在物理层而非虚拟…...
)
告别GSWP3:手把手教你为CESM2.1.3配置自定义气象强迫数据集(CLM1PT模式详解)
告别GSWP3:手把手教你为CESM2.1.3配置自定义气象强迫数据集(CLM1PT模式详解) 当研究团队需要将ERA5、CMIP6等新型再分析数据接入CESM模型时,往往会在数据接口环节遭遇"黑箱"操作困境。本文将以CLM1PT模式为切入点&#…...