【有啥问啥】具身智能(Embodied AI):人工智能的新前沿

具身智能(Embodied AI):人工智能的新前沿
引言
在人工智能(AI)的进程中,具身智能(Embodied AI)正逐渐成为研究与应用的焦点。具身智能不仅关注于机器的计算能力,更强调它们如何通过感知、交互与环境融为一体,实现类似于人类的智能行为。本文将深入探讨具身智能的概念、技术实现、应用场景以及未来发展趋势。
一、具身智能的概念
1.1 起源与发展
具身智能的概念最早由布鲁克斯等学者提出,他们认为智能不仅仅是一种内在的计算过程,更是一种通过身体与环境交互而不断演化的能力。这一思想与传统人工智能的符号主义和连接主义范式形成了鲜明对比。符号主义强调知识的符号表示和逻辑推理,而连接主义则关注神经网络的学习能力。具身智能则将智能视为一种涌现现象,通过身体与环境的交互不断产生。
- 传送门链接: 科普符号主义与连接主义:人工智能的两大主流学派
具体案例
以波士顿动力公司的Atlas机器人为例,它不仅能够在复杂地形中行走、奔跑,还能通过身体感知环境变化,自主调整步态和姿态,以应对突发情况。这种通过身体与环境的紧密交互来解决问题的能力,正是具身智能的生动体现。
1.2 核心思想
具身智能的核心思想在于“知”与“行”的紧密结合。Brooks提出的Subsumption Architecture就是一个经典的具身智能模型,它通过分层结构和行为生成器实现机器人的行为控制。这种架构强调行为的模块化和并行性,使得机器人能够适应复杂多变的环境。
- 传送门链接: 大型语言模型的涌现能力(Emergent Abilities):新一代AI的曙光
对比其他AI范式
与符号主义和连接主义相比,具身智能更强调智能的涌现性和环境依赖性。符号主义试图通过构建符号系统来模拟人类思维,但往往忽略了身体在智能中的作用;连接主义则侧重于神经网络的学习能力,但在处理复杂环境交互时显得力不从心。具身智能则通过身体与环境的紧密交互,实现了智能的涌现和演化,从而弥补了前两者的不足。
二、技术实现
2.1 感知层
感知层是具身智能的基础,它通过各种传感器获取环境信息。除了激光雷达、摄像头、麦克风、触觉传感器等常见传感器,现代具身智能系统还采用了更先进的传感器,如深度相机、力传感器等。
- 传感器选择:传感器的选择取决于具体的应用场景。例如,在室内环境中,RGB-D相机可以同时获取深度和颜色信息,而室外环境则更适合使用激光雷达。
- 数据融合:多种传感器的数据融合是感知层的一个重要研究方向。通过数据融合,可以提高感知的准确性和鲁棒性。
2.2 交互层
交互层负责智能系统与环境的互动。自然语言处理是交互层的重要组成部分。除了传统的基于规则和统计的方法,深度学习技术,如循环神经网络(RNN)和Transformer,在自然语言处理中得到了广泛应用。
- 自然语言理解:自然语言理解的目标是让机器能够理解人类语言的含义。这涉及到词义消歧、句法分析、语义理解等多个方面。
- 对话系统:对话系统是自然语言处理的一个重要应用。通过对话系统,用户可以与机器进行自然语言交互,完成各种任务。
2.3 运动层
运动层是具身智能的执行部分。运动控制是一个复杂的过程,涉及到轨迹规划、动力学建模、伺服控制等多个环节。
- 轨迹规划:轨迹规划的目标是生成一组平滑且安全的运动指令,以实现机器人的运动目标。
- 动力学建模:动力学建模是运动控制的基础,它描述了机器人的运动特性。
- 伺服控制:伺服控制通过反馈控制系统,保证机器人按照规划的轨迹运动。
2.4 学习层
学习层是具身智能的核心。强化学习是具身智能中最常用的学习方法之一。通过与环境交互,机器人可以学习到最优的行为策略。
- 深度强化学习:深度强化学习将深度学习与强化学习结合起来,使得机器人能够处理高维状态空间和动作空间。具体模型如DQN(深度Q网络)和A3C(异步优势演员评论家)在具身智能系统中得到了广泛应用。
- 传送门链接: 强化学习(Reinforcement Learning, RL)浅谈
- 迁移学习:迁移学习可以将已有的知识迁移到新的任务中,从而减少学习时间和数据需求。
- 传送门链接: 深度解析迁移学习(Transfer Learning)
- 元学习:元学习旨在学习如何学习,使得机器人能够快速适应新的环境和任务。
- 传送门链接: 深入探讨元学习(Meta-Learning):从“学习如何学习”到机器智能的飞跃
技术挑战
在实现具身智能的过程中,可能遇到的主要挑战包括传感器噪声、环境动态变化、模型泛化能力等问题。针对这些问题,研究者们正在不断探索新的算法和技术,以提高具身智能系统的鲁棒性和适应性。
三、应用场景
3.1 机器人
- 工业机器人:具身智能机器人可以在工业生产线中完成各种复杂任务,如焊接、装配、搬运等。通过身体与环境的交互,它们能够灵活应对各种生产需求。
- 服务机器人:服务机器人可以为人类提供各种服务,如家庭服务、医疗服务、教育服务等。它们通过感知用户的需求和情感状态,提供个性化的服务体验。
- 医疗机器人:医疗机器人可以辅助医生进行手术、康复训练等。通过高精度的运动控制和感知能力,它们能够减轻医护人员的工作负担,提高医疗质量。
案例深度分析
以医疗机器人为例,达芬奇手术系统是一种典型的具身智能医疗机器人。它通过高精度的机械臂和传感器系统,实现了对手术过程的精准控制。医生可以通过控制台远程操作机器人进行手术,同时机器人还能够实时反馈手术过程中的各种信息,帮助医生做出更准确的决策。
3.2 自动驾驶汽车
- 感知与决策:自动驾驶汽车通过传感器感知周围环境,并利用人工智能算法进行决策。它们能够实时分析路况、行人和其他车辆的行为,做出安全的驾驶决策。
- 人车交互:自动驾驶汽车需要与人类驾驶员、行人和其他车辆进行交互。通过自然语言处理和语音识别技术,它们能够理解人类的指令和需求,提供便捷的交互体验。
3.3 智能家居
- 智能家居助手:智能家居助手可以控制家中的各种设备,如灯光、空调、音响等。它们通过感知用户的行为和习惯,提供个性化的服务体验。
- 情感计算:智能家居助手还可以通过分析用户的表情、语调等,感知用户的情感状态,并据此调整服务策略。例如,在用户情绪低落时播放轻松的音乐以缓解情绪。
跨领域应用
除了上述领域外,具身智能还可以应用于教育、娱乐、军事等多个领域。在教育领域,具身智能机器人可以作为学生的学习伙伴和辅导老师;在娱乐领域,具身智能机器人可以为用户提供个性化的娱乐体验;在军事领域,具身智能机器人可以执行侦察、排雷等危险任务。
四、未来发展趋势
技术趋势
- 更高级的感知技术:随着量子计算等新技术的发展,未来具身智能系统可能会采用更高级的感知技术,如量子感知等,以提高感知的精度和速度。
- 更智能的交互方式:脑机接口等新型交互方式的出现,将为具身智能系统提供更自然、更高效的交互手段。
- 更高效的算法和模型:随着算法和模型的不断优化和创新,未来具身智能系统将能够处理更复杂、更多变的任务和环境。
社会影响
具身智能技术的发展将对社会、经济、文化等方面产生深远的影响。一方面,它将推动各行业的智能化升级和转型;另一方面,它也将引发一系列伦理和法律问题,如隐私保护、责任归属等。因此,我们需要制定相关的法律法规和伦理准则来规范具身智能技术的发展和应用。
结语
具身智能作为人工智能的一个重要分支,具有广阔的应用前景和深远的社会影响。通过不断的研究和探索,具身智能将在未来为人类社会带来更多的便利和福祉。同时,我们也需要关注其可能带来的挑战和问题,并积极寻求解决方案以确保其健康发展。
相关文章:
【有啥问啥】具身智能(Embodied AI):人工智能的新前沿
具身智能(Embodied AI):人工智能的新前沿 引言 在人工智能(AI)的进程中,具身智能(Embodied AI)正逐渐成为研究与应用的焦点。具身智能不仅关注于机器的计算能力,更强调…...

11-pg内核之锁管理器(六)死锁检测
概念 每个事务都在等待集合中的另一事务,由于这个集合是一个有限集合,因此一旦在这个等待的链条上产生了环,就会产生死锁。自旋锁和轻量锁属于系统锁,他们目前没有死锁检测机制,只能靠内核开发人员在开发过程中谨慎的…...

Git 与标签管理
在 Git 中,标签 tag 是指向某个 commit 的指针(所以创建和删除都很快)。Git 有 commit id 了,为什么还要有 tag?commit id 是一串无规律的数字,不好记;而 tag 是我们自定义的,例如我…...
初始化 MyPgXact)
【0334】Postgres内核之 auxiliary process(辅助进程)初始化 MyPgXact
1. MyPgXact(ProcGlobal->allPgXact)间接初始化 在上一篇文章【0333】Postgres内核之 auxiliary process(辅助进程)创建 PGPROC 中, 讲解了Postgres内核完成 AuxiliaryProcess 初始化 pid、lxid、procLatch、myProcLocks、lockGroupMembers等所有成员的过程。 这些成员…...

20.1 分析pull模型在k8s中的应用,对比push模型
本节重点介绍 : push模型和pull模型监控系统对比为什么在k8s中只能用pull模型的k8s中主要组件的暴露地址说明 push模型和pull模型监控系统 对比下两种系统采用的不同采集模型,即push型采集和pull型采集。不同的模型在性能的考虑上是截然不同的。下面表格简单的说…...

Ubuntu 镜像替换为阿里云镜像:简化你的下载体验
Ubuntu,作为一款广受欢迎的Linux发行版,以其稳定性和易用性著称。但你是否曾因为下载速度慢而感到沮丧?现在,你可以通过将Ubuntu的默认下载源替换为阿里云镜像来解决这个问题。本文将指导你如何完成这一过程。 为什么选择阿里云镜…...

The Sandbox 游戏制作教程第 6 章|如何使用装备制作出色的游戏 —— 避免环境危险
欢迎回到我们的系列,我们将记录 The Sandbox Game Maker 的 “On-Equip”(装备)功能的多种用途。 如果你刚加入 The Sandbox,装备功能是 “可收集组件”(Collectable Component)中的一个多功能工具…...

JavaScript中的输出方式
1. console.log() console.log() 是开发者在调试代码时最常用的方法。它将信息打印到浏览器的控制台,使开发者能够查看变量的值、程序的执行状态以及其他有用的信息。 用途:用于调试和记录程序运行时的信息。优点:简单易用,适合…...

力扣9.25
2306. 公司命名 给你一个字符串数组 ideas 表示在公司命名过程中使用的名字列表。公司命名流程如下: 从 ideas 中选择 2 个 不同 名字,称为 ideaA 和 ideaB 。 交换 ideaA 和 ideaB 的首字母。 如果得到的两个新名字 都 不在ideas 中,那么 …...

从零开始之AI面试小程序
从零开始之AI面试小程序 文章目录 从零开始之AI面试小程序前言一、工具列表二、开发部署流程1. VMWare安装2. Centos安装3. Centos环境配置3.1. 更改子网IP3.2. 配置静态IP地址 4. Docker和Docker Compose安装5. Docker镜像加速源配置6. 部署中间件6.1. MySQL部署6.2. Redis部署…...
Html2OpenXml:HTML转化为OpenXml的.Net库,轻松实现Html转为Word。
推荐一个开源库,轻松实现HTML转化为OpenXml。 01 项目简介 Html2OpenXml 是一个开源.Net库,旨在将简单或复杂的HTML内容转换为OpenXml组件。 该项目始于2009年,最初是为了将用户评论转换为Word文档而设计的 随着时间的推移,Ht…...

HumanNeRF:Free-viewpoint Rendering of Moving People from Monocular Video 精读
1. 姿态估计和骨架变换模块 人体姿态估计:HumanNeRF 通过已知的单目视频对视频中人物的姿态进行估计。常见的方法是通过人体姿态估计器(如 OpenPose 或 SMPL 模型)提取人物的骨架信息,获取 3D 关节的位置信息。这些关节信息可以帮…...

Springboot中基于注解实现公共字段自动填充
1.使用场景 当我们有大量的表需要管理公共字段,并且希望提高开发效率和确保数据一致性时,使用这种自动填充方式是很有必要的。它可以达到一下作用 统一管理数据库表中的公共字段:如创建时间、修改时间、创建人ID、修改人ID等,这些…...

Android 已经过时的方法用什么新方法替代?
过时修正举例 (Kotlin): getColor(): resources.getColor(R.color.white) //已过时// 修正后:ContextCompat.getColor(this, R.color.white) getDrawable(): resources.getDrawable(R.mipmap.test) //已过时//修正后:ContextCompat.getDrawable(this, R.mipmap.test) //…...

【RocketMQ】MQ与RocketMQ介绍
🎯 导读:本文介绍了消息队列(MQ)的基本概念及其在分布式系统中的作用,包括实现异步通信、削峰限流和应用解耦等方面的优势,并对ActiveMQ、RabbitMQ、RocketMQ及Kafka四种MQ产品进行了对比分析,涵…...
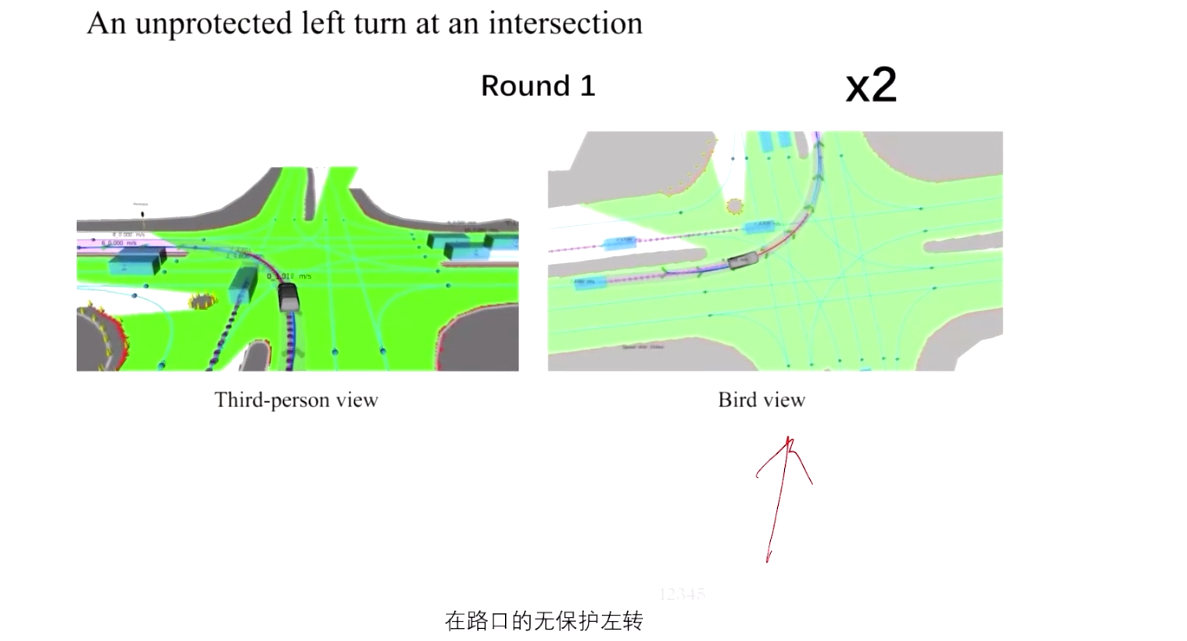
【笔记】自动驾驶预测与决策规划_Part4_时空联合规划
文章目录 0. 前言1. 时空联合规划的基本概念1.1 时空分离方法1.2 时空联合方法 2.基于搜索的时空联合规划 (Hybrid A* )2.1 基于Hybrid A* 的时空联合规划建模2.2 构建三维时空联合地图2.3 基于Hybrid A*的时空节点扩展2.4 Hybrid A* :时空节…...

Linux指令收集
文件和目录操作 ls: 列出目录内容。 -l 显示详细信息。-a 显示隐藏文件(以.开头的文件)。cd: 改变当前工作目录。 cd ~ 返回主目录。cd .. 上移一级目录。pwd: 显示当前工作目录。mkdir: 创建目录。 mkdir -p path/to/directory 创建多级目录。rmdir: 删…...
)
《C++并发编程实战》笔记(五)
五、内存模型和原子操作 5.1 C中的标准原子类型 原子操作是不可分割的操作,它或者完全做好,或者完全没做。 标准原子类型的定义在头文件<atomic>中,类模板std::atomic<T>接受各种类型的模板实参,从而创建该类型对应…...
)
在Python中实现多目标优化问题(5)
在Python中实现多目标优化问题 在Python中实现多目标优化,除了传统的进化算法(如NSGA-II、MOEA/D)和机器学习辅助的方法之外,还有一些新的方法和技术。以下是一些较新的或较少被提及的方法: 1. 基于梯度的多目标优化…...
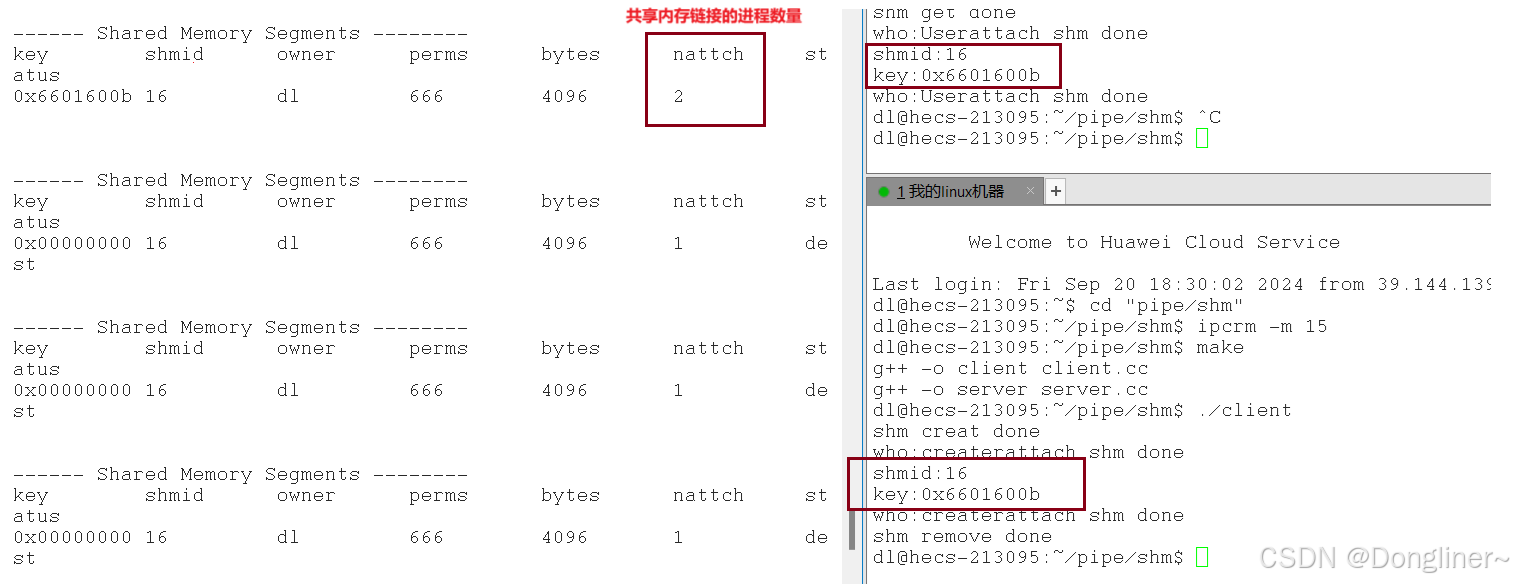
【Linux:共享内存】
共享内存的概念: 操作系统通过页表将共享内存的起始虚拟地址映射到当前进程的地址空间中共享内存是由需要通信的双方进程之一来创建但该资源并不属于创建它的进程,而属于操作系统 共享内存可以在系统中存在多份,供不同个数,不同进…...
)
别再为手眼标定头疼了!用Matlab+机器人工具箱搞定Eye-in-Hand/Eye-to-Hand(附完整代码)
机器人视觉实战:从零实现手眼标定与平面九点标定 在工业自动化领域,机器人视觉系统的精度直接影响着抓取、装配等关键任务的可靠性。许多工程师在理论阶段能够理解手眼标定的数学原理,但一到实际代码实现环节就陷入困境——数据格式如何准备…...
)
STM32F4上跑FreeType:手把手教你为嵌入式GUI添加矢量字体(附源码)
STM32F4实战:FreeType矢量字体移植与GUI深度优化指南 1. 嵌入式矢量字体技术选型与原理 在资源受限的嵌入式环境中实现矢量字体渲染,本质上是一场内存效率与视觉质量的博弈。FreeType作为行业标准的字体引擎,其核心优势在于采用二次贝塞尔曲…...
)
保姆级教程:用Winbox给ROS配置一线多拨,实测200M宽带叠加效果(附避坑指南)
家庭网络优化实战:Winbox配置多拨提升宽带利用率 家里装了200M宽带,但下载大文件时总觉得速度没跑满?多人同时在线看4K视频就开始卡顿?其实通过简单的路由器配置,你完全有可能突破运营商单线限制,让宽带利用…...

Simulink仿真数据管理指南:如何用Logging和Timetable格式进行高效后处理与可视化
Simulink仿真数据管理进阶:从Logging到自动化分析流水线设计 在工程仿真领域,数据管理往往成为制约效率提升的隐形瓶颈。当Simulink模型复杂度超过200个信号节点时,传统的"运行-导出-手动处理"模式会消耗工程师40%以上的时间在数据…...

别再折腾了!Windows 10/11下用VS2019编译ActiveMQ-CPP库的保姆级避坑指南
Windows平台下VS2019编译ActiveMQ-CPP库的终极解决方案 在Windows环境下使用Visual Studio 2019编译ActiveMQ-CPP库,对于需要实现高效消息队列通信的C开发者而言,是一个既关键又充满挑战的任务。不同于其他语言生态中"一键安装"的便捷&#x…...

rCore-Tutorial-v3:从零开始用Rust编写RISC-V操作系统的终极指南
rCore-Tutorial-v3:从零开始用Rust编写RISC-V操作系统的终极指南 【免费下载链接】rCore-Tutorial-v3 Lets write an OS which can run on RISC-V in Rust from scratch! 项目地址: https://gitcode.com/gh_mirrors/rc/rCore-Tutorial-v3 你是否曾梦想过亲手…...

Windows Cleaner:如何系统性地解决Windows磁盘空间管理难题
Windows Cleaner:如何系统性地解决Windows磁盘空间管理难题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款基于Python和PyQt5框…...

Notify.js性能优化指南:提升通知系统的响应速度
Notify.js性能优化指南:提升通知系统的响应速度 【免费下载链接】notifyjs Notify.js - A simple, versatile notification library 项目地址: https://gitcode.com/gh_mirrors/no/notifyjs 在现代Web应用中,通知系统作为用户交互的重要组成部分&…...

别再用Excel硬扛了!SPSS数据视图和变量视图保姆级上手指南
别再用Excel硬扛了!SPSS数据视图和变量视图保姆级上手指南 第一次打开SPSS时,很多从Excel转过来的用户会愣住——这个界面怎么既熟悉又陌生?左边明明也是表格,但为什么右键菜单里找不到"设置单元格格式"?右上…...

C语言中的数据类型存储
1、二进制和进制转换我们经常能听到 2 进制、 8 进制、 10 进制、 16 进制 这样的讲法,那是什么意思呢?其实2进制、8进制、10进制、16进制是数值的不同表⽰形式⽽已。⽐如:数值15的各种进制的表⽰形式(十六进制的数值之前写:0x &a…...