【从0开始自动驾驶】用python做一个简单的自动驾驶仿真可视化界面
【从0开始自动驾驶】用python做一个简单的自动驾驶仿真可视化界面
- 废话几句
- 废话不多说,直接上源码
- 目录结构
- init.py
- simulator.py
- simple_simulator_app.py
- vehicle_config.json
废话几句
- 自动驾驶开发离不开仿真软件
- 成品仿真软件种类多
- https://zhuanlan.zhihu.com/p/321771761#:~:text=%E5%8D%95%E5%B0%B1%E8%87%AA%E5%8A%A8%E9%A9%BE%E9%A9%B6%E4%BB%BF%E7%9C%9F,%E5%90%84%E8%87%AA%E7%9A%84%E5%8F%AF%E5%8F%96%E4%B9%8B%E5%A4%84%E3%80%82
- 问题在于
- 软件大多为WINDOWS环境,不一定满足开发环境需求
- 软件大多收费,受版权影响
- 软件较为复杂,普通开发任务无需复杂仿真软件
- 那么
- 以最简单的方式从0开始搭建一个可视化仿真软件
- 直接使用python matplot库进行可视化
- 后段采用简单车辆运动学控制可视化界面

废话不多说,直接上源码
目录结构
- src
- simple_simulator_app.py
- config
- vehicle_config.json
- lib
- init.py
- simulator.py
init.py
import json
import copydef import_veh_cfg(veh_cfg_path):with open(veh_cfg_path, "r", encoding="utf-8") as load_f:veh_cfg_ori = json.load(load_f)return veh_cfg_oridef init_veh_cfg(veh_cfg_path):veh_cfg_ori = import_veh_cfg(veh_cfg_path)# print(veh_cfg_ori)veh_cfg = copy.deepcopy(veh_cfg_ori)return veh_cfgsimulator.py
- 使用class编写的仿真器
- 输入为车辆x、y、yaw,进行可视化
- 后段接入运动学等函数可随意进行扩展
import numpy
import matplotlib.pyplot as pltclass simulator:def init_simulator(self, veh_cfg):plt.ion()self.veh_cfg = veh_cfgdef draws(self, x, y, yaw, xmin, xmax, ymin, ymax):self.veh_x = xself.veh_y = yself.veh_yaw = yaw # 角度plt.clf() # 清除之前画的图plt.xlim(xmin, xmax)plt.ylim(ymin, ymax)plt.title("simulator")plt.xlabel("X/m")plt.ylabel("Y/m")ax = plt.gca()ax.set_aspect(1) # 保持纵横比self.draw_veh()plt.pause(0.001)def draws_close(self):plt.ioff()def draw_veh(self): # yaw以x轴为0,逆时针为正plt.plot(self.veh_x, self.veh_y, "o", color="r")self.ca_veh_points()plt.plot(self.veh_x_points, self.veh_y_points, color="r")def ca_veh_points(self): # 计算车辆包络框的所有点half_veh_width = self.veh_cfg["width"] / 2self.veh_yaw_rad = numpy.deg2rad(self.veh_yaw)self.veh_x_points = [self.veh_x+ (self.veh_cfg["length"] - self.veh_cfg["rear_overhang"])* numpy.cos(self.veh_yaw_rad)+ half_veh_width * numpy.sin(self.veh_yaw_rad),self.veh_x+ (self.veh_cfg["length"] - self.veh_cfg["rear_overhang"])* numpy.cos(self.veh_yaw_rad)- half_veh_width * numpy.sin(self.veh_yaw_rad),self.veh_x- (self.veh_cfg["rear_overhang"]) * numpy.cos(self.veh_yaw_rad)- half_veh_width * numpy.sin(self.veh_yaw_rad),self.veh_x- (self.veh_cfg["rear_overhang"]) * numpy.cos(self.veh_yaw_rad)+ half_veh_width * numpy.sin(self.veh_yaw_rad),self.veh_x+ (self.veh_cfg["length"] - self.veh_cfg["rear_overhang"])* numpy.cos(self.veh_yaw_rad)+ half_veh_width * numpy.sin(self.veh_yaw_rad),]self.veh_y_points = [self.veh_y+ (self.veh_cfg["length"] - self.veh_cfg["rear_overhang"])* numpy.sin(self.veh_yaw_rad)- half_veh_width * numpy.cos(self.veh_yaw_rad),self.veh_y+ (self.veh_cfg["length"] - self.veh_cfg["rear_overhang"])* numpy.sin(self.veh_yaw_rad)+ half_veh_width * numpy.cos(self.veh_yaw_rad),self.veh_y- (self.veh_cfg["rear_overhang"]) * numpy.sin(self.veh_yaw_rad)+ half_veh_width * numpy.cos(self.veh_yaw_rad),self.veh_y- (self.veh_cfg["rear_overhang"]) * numpy.sin(self.veh_yaw_rad)- half_veh_width * numpy.cos(self.veh_yaw_rad),self.veh_y+ (self.veh_cfg["length"] - self.veh_cfg["rear_overhang"])* numpy.sin(self.veh_yaw_rad)- half_veh_width * numpy.cos(self.veh_yaw_rad),]simple_simulator_app.py
- 主函数入口
import timefrom lib.init import *
from lib.simulator import *if __name__ == "__main__":veh_cfg_path = r"./config/vehicle_config.json"veh_cfg = init_veh_cfg(veh_cfg_path)simulator_ = simulator()simulator_.init_simulator(veh_cfg)for i in range(0, 20):simulator_.draws(i, 15 + i * 0.3, 30 + i, 0, 30, 0, 30) # veh_x, veh_y, veh_yaw, xmin, xmax, ymin, ymaxtime.sleep(0.1)plt.pause(1000) # 暂停几秒看一看结果vehicle_config.json
-车辆配置文件
{"vehicle_type": "test","front_wheel_base": 1.3,"rear_wheel_base": 1.3,"width": 1.9,"length": 4,"rear_overhang": 0.4,"max_steer_wheel_angle": 35.0,"steer_ratio": 17.5
}
相关文章:
【从0开始自动驾驶】用python做一个简单的自动驾驶仿真可视化界面
【从0开始自动驾驶】用python做一个简单的自动驾驶仿真可视化界面 废话几句废话不多说,直接上源码目录结构init.pysimulator.pysimple_simulator_app.pyvehicle_config.json 废话几句 自动驾驶开发离不开仿真软件成品仿真软件种类多https://zhuanlan.zhihu.com/p/3…...

一拖二快充线:单接与双接的多场景应用
在当代社会,随着智能手机等电子设备的普及,充电问题成为了人们关注的焦点。一拖二快充线作为一种创新的充电解决方案,因其便捷性与高效性而受到广泛关注。本文将深入探讨一拖二快充线的定义、原理以及在单接与双接手机场景下的应用࿰…...

接口自动化测试概述
目录 1 接口自动化测试简介 1.1 什么是接口 1.2 什么是接口测试 1.3 为什么要做接口测试 1.4 什么是接口测试自动化 1.5 为什么要做接口测试自动化 2 接口自动化测试规范 2.1 文档准备 2.1.1 需求文档 2.1.2 接口文档 2.1.3 UI 交互图 2.1.4 数据表设计文档 2.2 明…...

Fingerprint.js:精准用户识别的浏览器指纹技术
在数字化时代,用户识别成为互联网服务中不可或缺的一环。随着隐私保护意识的增强,传统的用户识别方法如Cookies和本地存储面临着越来越多的挑战。而Fingerprint.js作为一种创新的浏览器指纹技术,以其高效、隐私友好的特性,逐渐在个…...
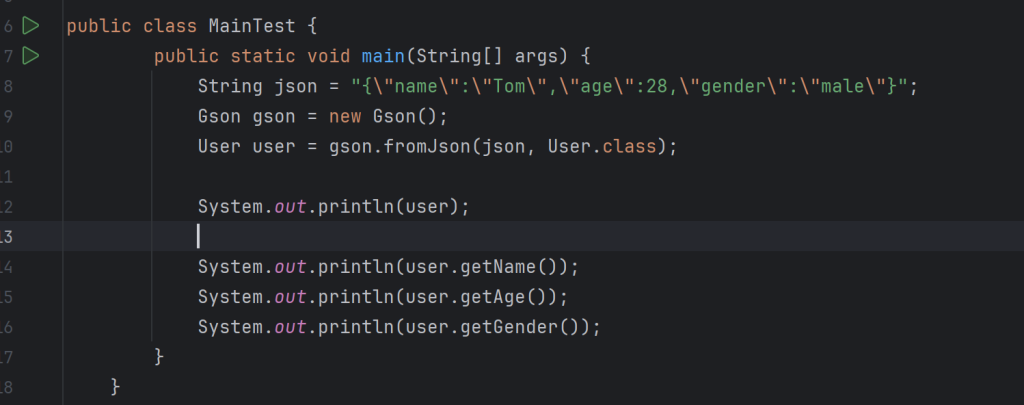
Gson将对象转换为JSON(学习笔记)
JSON有两种表示结构,对象和数组。对象结构以"{"大括号开始,以"}"大括号结束。中间部分由0或多个以”,"分隔的”key(关键字)/value(值)"对构成,关键字和值之间以":"分隔,语法结…...

什么是IPv6
目前国内的网络正在快速的向IPv6升级中,从网络基础设施如运营商骨干网、城域网,到互联网服务商如各类云服务,以及各类终端设备厂商如手机、电脑、路由器、交换机等。目前运营商提供的IPv6线路主要分为支持前缀授权和不支持前缀授权两种。 说…...
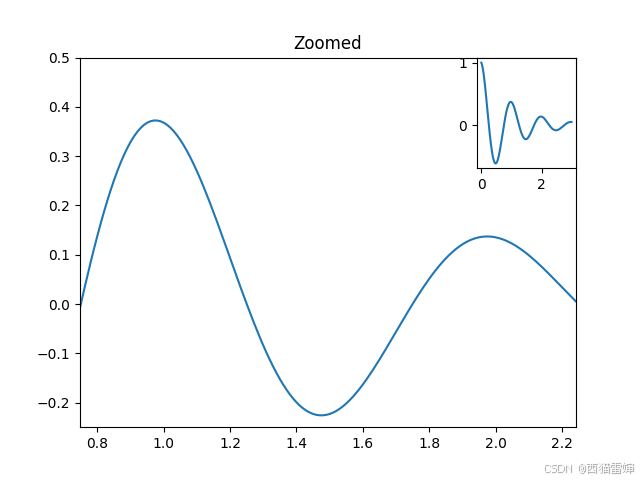
python画图|放大和缩小图像
在较多的画图场景中,需要对图像进行局部放大,掌握相关方法非常有用,因此我们很有必要一起学习 【1】官网教程 首先是进入官网教程,找到学习资料: https://matplotlib.org/stable/gallery/subplots_axes_and_figures…...

Mac优化清理工具CleanMyMac X 4.15.6 for mac中文版
CleanMyMac X 4.15.6 for mac中文版下载是一款功能更加强大的系统优化清理工具,软件只需两个简单步骤就可以把系统里那些乱七八糟的无用文件统统清理掉,节省宝贵的磁盘空间。CleanMyMac X 4.15.6 for mac 软件与最新macOS系统更加兼容,流畅地…...

资质申请中常见的错误有哪些?
在申请建筑资质的过程中,企业可能会犯一些常见的错误,以下是一些需要避免的错误: 1. 资料准备不充分: 申请资质需要提交大量的资料,包括企业法人资料、财务报表、业绩证明等。资料不齐全或不准确都可能导致申请失败。…...

基于单片机的多路温度检测系统
**单片机设计介绍,基于单片机CAN总线的多路温度检测系统设计 文章目录 前言概要功能设计设计思路 软件设计效果图 程序设计程序 前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计划导师,一名热衷于单片机技术探…...

面试题:通过栈实现队列
题目描述: 请你仅使用两个栈实现先入先出队列。队列应当支持一般队列支持的所有操作(push、pop、peek、empty): 实现 MyQueue 类: void push(int x) 将元素 x 推到队列的末尾int pop() 从队列的开头移除并返回元素i…...

网络战时代的端点安全演变
在恶意网络行为者与对手在世界各地展开网络战争的日常战争中,端点安全(中世纪诗人可能会称其为“守卫大门的警惕哨兵”)当然是我们的互联数字世界的大门。 端点安全类似于我们今天称之为现代企业的数字有机体的免疫系统,可以将…...
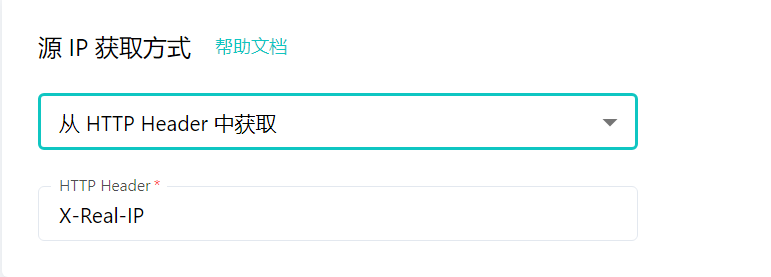
雷池 WAF 如何配置才能正确获取到源 IP
经常有大哥反馈说雷池攻击日志里显示的 IP 有问题。 这里我来讲一下为什么一些情况下雷池显示的攻击 IP 会有问题。 问题说明 默认情况下,雷池会通过 HTTP 连接的 Socket 套接字读取客户端 IP。在雷池作为最外层网管设备的时候这没有问题,雷池获取到的…...

libcrypto.so.10内容丢失导致sshd无法运行
说明: 我的是centos的服务器,被扫出有ssh漏洞,需要升级到OpenSSH_9.8p1, OpenSSL 3.0.14 4 报错 我的系统和环境升级前的版本 这是升级之后的版本 OpenSSH_9.8p1, OpenSSL 3.0.14 4 解决:我这个的原因是升级的时候把这个文件给删除了, 复制旧服务器上的 libcrypto.so.1…...

DTH11温湿度传感器
DHT11 是一款温湿度复合传感器,常用于单片机系统中进行环境温湿度的测量。以下是对 DHT11 温湿度传感器的详细讲解: 一、传感器概述 DHT11 数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器。它应用专用的数字模块采集技术和温湿度传感…...
 简单介绍)
【Linux系列】CMA (Contiguous Memory Allocator) 简单介绍
CMA (Contiguous Memory Allocator) CMA是Linux内核中的一种内存分配机制,用于分配物理上连续的内存块。它主要解决了在系统运行一段时间后,物理内存碎片化导致难以分配大块连续物理内存的问题。 CMA的工作原理 在系统启动时,CMA会预留一块…...

基于单片机餐厅呼叫控制系统仿真设计
文章目录 前言资料获取设计介绍设计程序具体实现截图设计获取 前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计划导师,一名热衷于单片机技术探索与分享的博主、专注于 精通51/STM32/MSP430/AVR等单片机设计 主要对象是咱们…...
)
详细分析Mysql中的定时任务(Event事件)
目录 前言1. 基本知识2. Event事件3. Demo 前言 基本的知识推荐阅读: 详细分析Mysql触发器的基本使用(图文解析)详细分析SQL Server触发器的基本知识详细分析Corn表达式(附Demo) 特性事件定时任务触发器触发条件基于…...
(三))
SpinalHDL之语义(Semantic)(三)
本文作为SpinalHDL学习笔记第七十一篇,介绍SpinalHDL的规则(Rules)。 目录: 1.简介(Introduction) 2.并⾏性(Concurrency) 3.以最后赋值为准(Last valid assignment wins) 4.Scala下的信号和寄存器的内在联系(Signal and register interactions with Scala)(OOP引⽤+函数…...

SpringBoot 请求和响应
1. Spring Boot 请求与响应概述 在 Spring Boot 开发中,客户端通过浏览器发起请求,后端使用内置的 Tomcat Web 服务器处理请求,返回响应数据。请求和响应的过程遵循 HTTP 协议。Spring Boot 的核心 Servlet 程序是 DispatcherServlet&#x…...

Smart_rtmpd配置全解:从单局域网到跨网段,你的OBS推流服务器搭建指南
Smart_rtmpd高阶配置指南:从局域网到跨网段的OBS推流实战 在当前的数字内容创作浪潮中,实时视频流传输已成为游戏直播、在线教育、企业内训等场景的刚需。对于技术爱好者和小型团队而言,自建推流服务器不仅能避免第三方平台的限制,…...

基于Next.js与Prisma构建宠物社区应用:全栈开发实战解析
1. 项目概述:一个为宠物爱好者打造的社区应用最近在GitHub上闲逛,发现了一个挺有意思的开源项目,叫jtsang4/happypaw。光看名字,“Happy Paw”(快乐的爪子),就能猜到这八成是和宠物相关的。点进…...

SyntaxUI:基于Tailwind CSS与Framer Motion的React组件库实战指南
1. 项目概述:SyntaxUI,一个为现代Web开发者提速的组件库如果你和我一样,常年奋战在React、Next.js项目的一线,那你一定对“重复造轮子”这件事深恶痛绝。每次新项目启动,从零开始搭建按钮、卡片、模态框、导航栏&#…...
)
解决Modelsim SE 10.6c仿真Vivado 2019乘法器IP核的“.vhd only”难题(附完整脚本)
解决Modelsim SE 10.6c仿真Vivado 2019乘法器IP核的“.vhd only”难题(附完整脚本) 在FPGA设计流程中,Xilinx Vivado与Mentor Modelsim的组合是许多工程师的首选工具链。但当Vivado 2019生成的乘法器IP核仅提供VHDL接口文件(.vhd)时ÿ…...

AI小白必看:打好基础再冲大模型,收藏这份学习路线图!
本文针对想学习AI的学生,强调掌握基础的重要性,避免直接进入大模型学习。文章提出应先理解AI的核心是让机器从数据中学习规律,并掌握数学、编程和数据思维能力。建议从数据处理开始,熟悉Python及常用库,逐步学习机器学…...

Zotero茉莉花插件:3大功能轻松管理中文文献,科研效率翻倍提升
Zotero茉莉花插件:3大功能轻松管理中文文献,科研效率翻倍提升 【免费下载链接】jasminum A Zotero add-on to retrive CNKI meta data. 一个简单的Zotero 插件,用于识别中文元数据 项目地址: https://gitcode.com/gh_mirrors/ja/jasminum …...

Herc.ai:一站式AI API网关,统一调用GPT-4、Gemini等主流模型
1. 项目概述:Herc.ai,一个面向开发者的全能AI API网关如果你正在寻找一个能让你在项目中轻松集成GPT-4、Gemini、DALL-E、Flux等主流AI模型,同时又不想被单一供应商绑定、不想处理复杂的多API密钥管理、并且希望有一个统一的、开发者友好的接…...
自适应计算与实战调优指南)
YOLOv5锚框(anchor)自适应计算与实战调优指南
1. 为什么需要自定义YOLOv5锚框参数 第一次用YOLOv5跑自己的数据集时,我发现模型死活训不出好效果。明明用的是官方预训练权重,标注数据也检查过没问题,但AP值就是上不去。后来把预测结果可视化出来才发现问题——那些长条形物体(…...

DeepSeek API Gateway与大模型推理服务深度协同:如何实现Token级流控、异步响应封装、Streaming SSE自动保活?
更多请点击: https://intelliparadigm.com 第一章:DeepSeek API Gateway架构全景与核心定位 DeepSeek API Gateway 是面向大模型服务的高性能、可扩展网关系统,承担请求路由、认证鉴权、流量控制、协议转换与可观测性聚合等关键职责。它并非…...

Vulkan学习笔记
顺序很重要:#define 必须在 #include <GLFW/glfw3.h> 之前出现,否则不起作用。作用:当 GLFW 的头文件看到这个宏被定义后,它就会知道你需要 Vulkan 支持,并自动执行 #include <vulkan/vulkan.h>࿰…...