【无人机设计与控制】Multi-UAV|多无人机多场景路径规划算法MATLAB
摘要
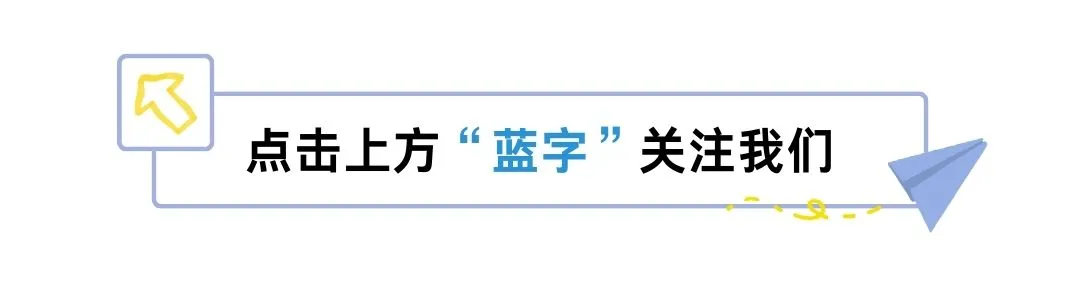
本研究探讨了多无人机路径规划问题,提出了三种不同算法的对比分析,包括粒子群优化(PSO)、灰狼优化(GWO)和鲸鱼优化算法(WOA)。利用MATLAB实现了多场景仿真实验,验证了各算法在多无人机协同路径规划中的性能。实验结果表明,GWO和WOA算法在路径优化的收敛速度和路径长度上表现优于PSO算法,且WOA算法在规避障碍物和路径平滑性上具有显著优势。
理论
多无人机路径规划问题的目标是在满足特定约束的情况下,找到多无人机的最优飞行路径。路径规划的优化目标通常包括最短路径、最低能耗、避开障碍物等。在本研究中,我们选择了三种不同的智能优化算法来解决多无人机路径规划问题:
-
粒子群优化(PSO):PSO通过模拟群体中个体(粒子)之间的信息共享来寻找最优解,每个粒子根据自身的历史最佳位置和群体的最佳位置进行更新。
-
灰狼优化(GWO):GWO模拟了灰狼的社会结构和捕猎行为,分别通过领导者(α狼)、追随者(β狼、δ狼)和探路者(ω狼)进行搜索,逐步逼近最优解。
-
鲸鱼优化算法(WOA):WOA通过模拟鲸鱼的捕食行为,通过收缩包围机制和螺旋更新位置等策略来找到最优解,具有良好的全局搜索能力。
实验结果
在实验中,我们针对多种地形场景进行了多无人机路径规划仿真,具体包括:
-
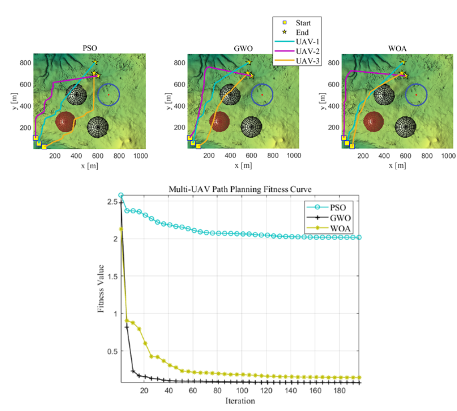
二维平面场景:各算法均能成功找到无人机的最优路径,但GWO和WOA在路径收敛速度上表现更优,WOA尤其在障碍物密集区域表现出更高效的路径规划能力。
-
三维复杂地形场景:PSO在三维环境下的表现稍显逊色,路径较长且不够平滑。GWO和WOA则能更好地适应复杂地形,WOA在路径平滑度和障碍规避上表现尤为突出。
如下是各算法的路径规划结果及其在不同迭代次数下的适应度值收敛曲线:
-
PSO:收敛较慢,且路径存在多余的弯曲。
-
GWO:较快收敛,路径优化较好,但在复杂环境中仍存在局部收敛问题。
-
WOA:收敛速度最快,路径平滑且避障效果最佳。
部分代码
% 主程序:MainMultiUAVMultiAlgo.m
% 初始化无人机位置、目标位置及障碍物
UAV_num = 3;
start_positions = [50, 50; 150, 150; 250, 250];
target_positions = [900, 900; 850, 850; 800, 800];
obstacles = [300, 300, 50; 600, 600, 80; 700, 400, 60];% 选择算法(PSO, GWO, WOA)
algorithm = 'WOA'; % 可选择 'PSO', 'GWO', 'WOA'% 运行优化算法
switch algorithmcase 'PSO'result = PSO_path_planning(UAV_num, start_positions, target_positions, obstacles);case 'GWO'result = GWO_path_planning(UAV_num, start_positions, target_positions, obstacles);case 'WOA'result = WOA_path_planning(UAV_num, start_positions, target_positions, obstacles);
end% 绘制路径
plot_path(result);% PSO算法路径规划
function result = PSO_path_planning(UAV_num, start_positions, target_positions, obstacles)% 初始化粒子% PSO优化路径% 具体算法逻辑略
end% GWO算法路径规划
function result = GWO_path_planning(UAV_num, start_positions, target_positions, obstacles)% GWO优化路径% 具体算法逻辑略
end% WOA算法路径规划
function result = WOA_path_planning(UAV_num, start_positions, target_positions, obstacles)% WOA优化路径% 具体算法逻辑略
end% 路径绘制函数
function plot_path(result)% 根据规划结果绘制路径figure;plot(result.x, result.y, 'LineWidth', 2);xlabel('x [m]');ylabel('y [m]');title('UAV Path Planning');legend('UAV-1', 'UAV-2', 'UAV-3');
end
参考文献
❝
Kennedy, J., & Eberhart, R. (1995). Particle swarm optimization. Proceedings of ICNN'95 - International Conference on Neural Networks, 1942-1948.
Mirjalili, S., Mirjalili, S. M., & Lewis, A. (2014). Grey Wolf Optimizer. Advances in Engineering Software, 69, 46-61.
Mirjalili, S., & Lewis, A. (2016). The Whale Optimization Algorithm. Advances in Engineering Software, 95, 51-67.
相关文章:
【无人机设计与控制】Multi-UAV|多无人机多场景路径规划算法MATLAB
摘要 本研究探讨了多无人机路径规划问题,提出了三种不同算法的对比分析,包括粒子群优化(PSO)、灰狼优化(GWO)和鲸鱼优化算法(WOA)。利用MATLAB实现了多场景仿真实验,验证…...

Visual Studio C# 编写加密火星坐标转换
Visual Studio C# 编写加密火星坐标转换 1、WGS84坐标转GCJ02火星坐标2、GCJ02火星坐标转WGS84坐标(回归计算)3、GCJ02火星坐标转BD09百度坐标4、BD09百度坐标转GCJ02火星坐标(回归计算)5、坐标公共转换类6、地图显示7、程序简单界…...

微服务-流量染色
1. 功能目的 通过设置请求头的方式将http请求优先打到指定的服务上,为微服务开发调试工作提供便利 请求报文难模拟:可以直接在测试环境页面上操作,流量直接打到本地IDEA进行debug请求链路较长:本地开发无需启动所有服务…...
)
C语言实现 操作系统 经典的进程同步问题(2)
哲学家进餐问题 哲学家进餐问题是一个经典的同步问题,涉及多个哲学家试图同时用餐,但每个哲学家左右两边只有一把叉子。为了避免死锁和饥饿,可以使用记录型信号量(也称为计数信号量)来管理叉子的使用。 1、利用记录型…...

有效的字母异位词【字符串哈希】
题目 题解: 1.排序: #include<algorithm>class Solution{public:bool isAnagram(string s,string t){sort(s.begin(),s.end());sort(t.begin(),t.end());return st;} } 时间复杂度O(nlogn) 2.哈希表 #include<algorithm>int hash1[100]; …...

如何选择与运用工具提升工作效率的秘密指南
一、引言 ---- 在当今这个信息爆炸的时代,编程工具的选择对于开发者的工作效率至关重要。从智能的代码编辑器到强大的版本控制工具,再到那些能让我们事半功倍的自动化脚本,每一款工具都有其独特的优势和价值。那么,哪款编程工具…...

Spring系列 AOP实现过程
文章目录 实现原理EnableAspectJAutoProxyAnnotationAwareAspectJAutoProxyCreator 代理创建过程wrapIfNecessarygetAdvicesAndAdvisorsForBeanfindCandidateAdvisorsfindAdvisorsThatCanApply createProxy AspectJ注解处理代理调用过程 实现原理 本文源码基于spring-aop-5.3.…...

C语言 getchar 函数完全解析:掌握字符输入的关键
前言 在C语言中,getchar 是一个非常实用的函数,用于从标准输入流(通常是键盘)读取单个字符。这对于处理文本输入非常有用,尤其是在需要逐个字符处理的情况下。本文将深入探讨 getchar 函数的用法和特点,并…...

Docker安装mysql8并配置主从复制
1. 安装mysql8 1.1 新增挂载文件 # 新增mysql挂载文件夹 mkdir -p /root/docker/mysql/m01/log mkdir -p /root/docker/mysql/m01/data mkdir -p /root/docker/mysql/m01/conf1.2 新增mysql配置文件 # 新增mysql配置文件 cd /root/docker/mysql/m01/conf vim my.cnf # 下面是…...

快手:数据库升级实践,实现PB级数据的高效管理|OceanBase案例
本文作者:胡玉龙,快手技术专家 快手在较初期采用了OceanBase 3.1版本成功替换了多个核心业务、数百套的MySQL集群。至2023年,快手的数据量已突破800TB大关,其中最大集群的数据量更是达到了数百TB级别。为此,快手将数据…...

基于Node.js+Express+MySQL+VUE实现的计算机毕业设计共享单车管理网站
单车信息选择骑行 骑行状态留言公告/springboot/javaWEB/J2EE/MYSQL数据库/vue前后分离小程序 目录 功能图 界面展示 开发目标 开发背景意义 开发意义 开发目的 项目概述 技术选型与理由 系统设计与功能实现 项目可执行性分析 系统架构需求 性能需…...

人工智能辅助的神经康复
人工智能辅助的神经康复是通过应用人工智能(AI)技术来改善神经系统损伤患者的康复过程。此领域结合了深度学习、数据分析和机器人技术,旨在提升康复效果、个性化治疗方案和监测进展。以下是该领域的关键组成部分和应用: 1. 康复评…...

KKT实际运用 -MATLAB
FMINCON函数可以很方便的求出:fun:目标函数,即需要最小化的函数,输入参数为向量x,输出为标量f(x)。x0:初始点,即求解过程的起始点,可以是标量、向量或矩阵。A和b:线性不等…...

php在线相册
1、将静态页面效果完成 解压到www里 整个数据 暂时是错误的 建立连接密码为root 运行sql文件 右键根目录刷新 刷新后成功 开始 测试 如果需要上传照片,点击创建相册,选择上传文件,选择文件后退出 导入alumbenew2 2.提交表单方式 3.利用ph…...

Xcode手动安装SDK模拟器
1.下载SDK模拟器&Xcode SDK和Xcode官方下载地址 2.下载好后使用命令将SDK导入到Xcode中如下命令 注:我是在/Applications 目录下执行的命令,模拟其地址直接拖拽过来 sudo xcode-select -s Xcode.app xcodebuild -runFirstLaunch xcodebuild -imp…...
Docker安装consul + go使用consul + consul知识
1. 什么是服务注册和发现 假如这个产品已经在线上运行,有一天运营想搞一场促销活动,那么我们相对应的【用户服务】可能就要新开启三个微服务实例来支撑这场促销活动。而与此同时,作为苦逼程序员的你就只有手动去 API gateway 中添加新增的这…...

JWT 漏洞 - 学习手册
0x01:JWT 前导知识 0x0101:JWT 详解 0x02:JWT 漏洞介绍 0x0201:JWT 漏洞介绍 0x03:JWT 挖掘思路 JWT 漏洞挖掘思路 - JWT Payload 敏感信息泄露 备注:通过泄露的 JWT Payload 获取用户的敏感信息&#…...

HTML【知识改变命运】03font 字体标签
题目:在页面上显示"北京"两个字,字体为微软雅黑,颜色为红色,大小为40xp; font标签可以修饰字体的大小,颜色,和字体 属性:color颜色,face字体,size大…...

集师专属知识付费小程序搭建 心理咨询小程序搭建
一、产品简介 集师SaaS知识付费软件,为知识创业者或商家提供一站式内容交付解决方案,助力商家搭建集品牌传播、商业变现和用户运营于一体的线上知识服务系统,覆盖全渠道经营场景,占据每个流量入口,使流量变现快速高效…...

https://www.aitoolpath.com/ 一个工具数据库,目前储存了有2000+各种工具。每日更新
AI 工具爆炸?别怕,这个网站帮你整理好了! 哇塞,兄弟们!AI 时代真的来了!现在各种 AI 工具跟雨后春笋似的,噌噌噌地往外冒。AI 写作、AI 绘画、AI 代码生成……简直是要逆天啊! 可是…...

VINS-Mono在EUROC数据集上的实战评测:从轨迹精度到运行耗时,我的避坑心得
VINS-Mono在EUROC数据集上的实战评测:从轨迹精度到运行耗时,我的避坑心得 当第一次在无人机上部署VINS-Mono时,我盯着实时轨迹和地面真值之间逐渐拉大的偏差,意识到论文里的漂亮曲线背后藏着太多未言明的细节。这次评测源于一个实…...

Claude Orchestra:基于Claude模型的AI智能体编排框架实战指南
1. 项目概述:Claude Orchestra 是什么,以及它为何值得关注最近在探索如何将大型语言模型(LLM)的能力更系统地整合到工作流中时,我遇到了一个名为mianham9042/claude-orchestra的项目。这个名字本身就很有意思——“Cla…...

OCR实战三阶段:检测、识别、结构化全流程解析
1. 这不是“把图片变文字”那么简单:OCR背后的真实战场光学字符识别(OCR)这三个字母,很多人第一反应是“截图转文字”“PDF复制不了?丢给OCR试试”。但如果你真这么想,就等于站在手术室门口说“不就是动刀子…...

AI智能体构建实战:从架构设计到工程落地的关键挑战与解决方案
1. 项目概述:揭开AI智能体构建的隐秘面纱 “构建AI智能体”,这听起来像是当下最酷、最前沿的技术话题。无论是科技新闻还是行业论坛,你都能看到无数关于智能体如何自动化工作流、理解复杂指令、甚至自主决策的激动人心的讨论。然而࿰…...

告别手动下载!3步轻松批量获取网易云音乐FLAC无损音乐
告别手动下载!3步轻松批量获取网易云音乐FLAC无损音乐 【免费下载链接】NeteaseCloudMusicFlac 根据网易云音乐的歌单, 下载flac无损音乐到本地.。 项目地址: https://gitcode.com/gh_mirrors/nete/NeteaseCloudMusicFlac 你是不是也遇到过这样的烦恼&#x…...
)
ZCU102开发板新手避坑:从官网下载MIG例程到LED闪烁的完整流程(Vivado 2023.1)
ZCU102开发板新手避坑:从官网下载MIG例程到LED闪烁的完整流程(Vivado 2023.1) 刚拿到ZCU102开发板时,那种既兴奋又忐忑的心情我至今记忆犹新。作为Xilinx旗下的高端FPGA开发平台,ZCU102强大的性能和丰富的接口让它成为…...

从‘幂的末尾’到RSA加密:一个模运算技巧如何贯穿编程竞赛与网络安全?
从竞赛编程到网络安全:模运算的双面人生 第一次在OpenJudge上遇到"幂的末尾"这道题时,我盯着屏幕上的数字发愣——计算a^b的最后三位数,这不就是求a^b模1000的结果吗?当时的我并不知道,这个看似简单的数学技…...
)
Midjourney输出≠成品!树莓派自动裁切+水印+背胶封装印相工作流(附GitHub开源项目+硬件BOM清单)
更多请点击: https://intelliparadigm.com 第一章:Midjourney输出≠成品!树莓派自动裁切水印背胶封装印相工作流(附GitHub开源项目硬件BOM清单) Midjourney生成的高分辨率图像只是创作起点,真正交付实体印…...

2026年市面上的培训机构管理系统对比,谁才是性价比之王
教务是培训机构的 “心脏”,而排课是教务最核心、最耗时、最容易出错的环节。传统人工排课:打开 Excel,手动填教师、教室、学员、时间,反复核对冲突,排一周课表要 1–3 天,还经常出现:老师时间撞…...
)
HDFS源码(二)
DataNode启动源码 创建HttpServer 初始化DataNode Rpc服务 获取NameNode Rpc代理 Datanode向NameNode注册 DataNode与NameNode周期心跳及block块汇报 数据上传源码 创建文件系统及初始化DFSClient 连接NN创建目录 启动DataStreamer线程 向dataQueue队列中写入packet 设置副本写…...