TB6612电机驱动模块(STM32)
目录
一、介绍
二、模块原理
1.原理图
2.电机驱动原理
三、程序设计
main.c文件
Motor.h文件
Motor.c文件
四、实验效果
五、资料获取
项目分享
一、介绍
TB6612FNG 是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流 MOSFET-H 桥结构,双通道电路输出,可同时驱动 2 个电机。它具有很高的集成度,同时能提供足够的输出能力,运行性能和能耗方面也具有优势,因此在集成化、小型化的电机控制系统中,它可以作为理想的电机驱动器件。

以下是TB6612电机驱动模块的参数:
| 型号 | TB6612FNG |
| 驱动电压 | VM输入(4.5-10V) |
| 逻辑电平 | VCC输入(2.7-5.5V) |
| 工作电流 | 1.2A |
| 峰值电流 | 3.2A |
哔哩哔哩视频链接:
TB6612电机驱动模块(STM32)
(资料分享见文末)
二、模块原理
1.原理图


2.电机驱动原理


三、程序设计
使用STM32F103C8T6通过TB6612控制电机完成开关、正反转转和调速的操作。
| AIN1 | PA0 |
| AIN2 | PA1 |
| PWMA | PA2 |
| STBY | +5V |
| OLED_SCL | PB11 |
| OLED_SDA | PB10 |
main.c文件
#include "stm32f10x.h"
#include "led.h"
#include "usart.h"
#include "delay.h"
#include "oled.h"
#include "Motor.h"
#include "key.h"/*****************辰哥单片机设计******************STM32* 项目 : TB6612FNG电机驱动实验 * 版本 : V1.0* 日期 : 2024.9.26* MCU : STM32F103C8T6* 接口 : 参看Motor.h * BILIBILI : 辰哥单片机设计* CSDN : 辰哥单片机设计* 作者 : 辰哥 **********************BEGIN***********************/int key = 0;
int key_state = 0;int main(void)
{ SystemInit();//配置系统时钟为72M delay_init(72);LED_Init();LED_On();MOTOR_Init();USART1_Config();//串口初始化Key_Init();OLED_Init();printf("Start \n");delay_ms(1000);OLED_Clear();//显示“电机转速:”OLED_ShowChinese(0,0,0,16,1);OLED_ShowChinese(16,0,1,16,1);OLED_ShowChinese(32,0,2,16,1);OLED_ShowChinese(48,0,3,16,1);OLED_ShowChar(64,0,':',16,1);while (1){key = Key_GetData();if(key)key_state++;if(key_state%4==1){Motor_SetSpeed(60);OLED_ShowNum(56,24,1,1,16,1); //1}if(key_state%4==2){Motor_SetSpeed(80);OLED_ShowNum(56,24,2,1,16,1); //2}if(key_state%4==3){Motor_SetSpeed(100);OLED_ShowNum(56,24,3,1,16,1); //3}if(key_state%4==0){Motor_SetSpeed(0);OLED_ShowNum(56,24,0,1,16,1); //0}}
}Motor.h文件
#ifndef __MOTOR_H
#define __MOTOR_H
#include "stm32f10x.h"
#include "delay.h"
#include "sys.h"/*****************辰哥单片机设计******************STM32* 文件 : TB6612FNG电机驱动h文件 * 版本 : V1.0* 日期 : 2024.9.26* MCU : STM32F103C8T6* 接口 : 见代码 * BILIBILI : 辰哥单片机设计* CSDN : 辰哥单片机设计* 作者 : 辰哥**********************BEGIN***********************//***************根据自己需求更改****************/
// TB6612FNG电机驱动模块 GPIO宏定义#define MOTOR_CLK RCC_APB2Periph_GPIOA#define MOTOR_AIN1_GPIO_PIN GPIO_Pin_0
#define MOTOR_AIN2_GPIO_PIN GPIO_Pin_1
#define MOTOR_AIN1_GPIO_PORT GPIOA
#define MOTOR_AIN2_GPIO_PORT GPIOA#define MOTOR_PWMA_GPIO_PIN GPIO_Pin_2
#define MOTOR_PWMA_GPIO_PORT GPIOA/*********************END**********************/void MOTOR_Init(void);
void PWM_Init(void);
void Motor_SetSpeed(int8_t Speed);#endifMotor.c文件
#include "Motor.h"/*****************辰哥单片机设计******************STM32* 文件 : TB6612FNG电机驱动模块c文件 * 版本 : V1.0* 日期 : 2024.9.26* MCU : STM32F103C8T6* 接口 : 见代码 * BILIBILI : 辰哥单片机设计* CSDN : 辰哥单片机设计* 作者 : 辰哥**********************BEGIN***********************/void MOTOR_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(MOTOR_CLK, ENABLE ); //配置时钟GPIO_InitStructure.GPIO_Pin = MOTOR_AIN1_GPIO_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(MOTOR_AIN1_GPIO_PORT,&GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = MOTOR_AIN2_GPIO_PIN;GPIO_Init(MOTOR_AIN2_GPIO_PORT,&GPIO_InitStructure);PWM_Init();}void PWM_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = MOTOR_PWMA_GPIO_PIN;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(MOTOR_PWMA_GPIO_PORT, &GPIO_InitStructure); //将PA1和PA2引脚初始化为推挽输出TIM_InternalClockConfig(TIM2);//配置实际单元TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数模式TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //自动重装ARR 分辨率TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //预分频PSC TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure); //给结构体赋予初值 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = 0; //CCRTIM_OC3Init(TIM2,&TIM_OCInitStructure);TIM_Cmd(TIM2,ENABLE);
} void PWM_SetCompare3(uint16_t compare)
{TIM_SetCompare3(TIM2,compare);
}void Motor_SetSpeed(int8_t Speed)
{if(Speed >= 0){GPIO_SetBits(MOTOR_AIN1_GPIO_PORT,MOTOR_AIN1_GPIO_PIN);GPIO_ResetBits(MOTOR_AIN2_GPIO_PORT,MOTOR_AIN2_GPIO_PIN);PWM_SetCompare3(Speed);}else{GPIO_ResetBits(MOTOR_AIN1_GPIO_PORT,MOTOR_AIN1_GPIO_PIN);GPIO_SetBits(MOTOR_AIN2_GPIO_PORT,MOTOR_AIN2_GPIO_PIN);PWM_SetCompare3(-Speed);}
}四、实验效果

五、资料获取
项目分享
相关文章:
TB6612电机驱动模块(STM32)
目录 一、介绍 二、模块原理 1.原理图 2.电机驱动原理 三、程序设计 main.c文件 Motor.h文件 Motor.c文件 四、实验效果 五、资料获取 项目分享 一、介绍 TB6612FNG 是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流 MOSFET-H 桥结构ÿ…...

webpack信息泄露
先看看webpack中文网给出的解释 webpack 是一个模块打包器。它的主要目标是将 JavaScript 文件打包在一起,打包后的文件用于在浏览器中使用,但它也能够胜任转换、打包或包裹任何资源。 如果未正确配置,会生成一个.map文件,它包含了原始JavaScript代码的映…...

启动服务并登录MySQL9数据库
【图书推荐】《MySQL 9从入门到性能优化(视频教学版)》-CSDN博客 《MySQL 9从入门到性能优化(视频教学版)(数据库技术丛书)》(王英英)【摘要 书评 试读】- 京东图书 (jd.com) Windows平台下安装与配置MyS…...

微服务_3.微服务保护
文章目录 一、微服务雪崩及解决方法1.1、超时处理1.2、仓壁模式1.3、断路器1.4、限流 二、Sentinel2.1、流量控制2.1.1、普通限流2.1.2、热点参数限流 2.2、线程隔离2.3、熔断降级2.3.1、断路器状态机2.3.2、断路器熔断策略2.3.2.1、慢调用2.3.2.2、异常比例,异常数…...

【设计模式】软件设计原则——依赖倒置合成复用
依赖倒置引出 依赖倒置 定义:高层模块不应该依赖低层模块,二者都应该依赖抽象;抽象不应该依赖细节,细节应该依赖抽象。面向接口编程而不是面向实现编程。 通过抽象使用抽象类、接口让各个类or模块之间独立不影响,实现…...

vue中如何实现组件通信
1. 父子组件通信 1. props和emits 我们最常见的组件通信就是父子组件数据通信。父子组件实现数据通信需要使用props和emit两个api。 在父组件中我们通过props将数据绑定给子组件,在子组件中我们可以通过props对象来收集到父组件传递的数据。 在子组件想要修改的pr…...

C/C++:内存管理
文章目录 前言一、内存分区1. 内存划分情况2. 最大内存计算 二、malloc/calloc/realloc 与 free1. malloc2. calloc3. realloc4. free5. 差异对比6. 失败处理 三、内存分配题目1. 题目2. 内存区域划分 四、C内存管理方式1. new 与 delete2. new/delete操作内置类型3. new和dele…...

jmeter学习(4)提取器
同线程组https://blog.csdn.net/vikeyyyy/article/details/80437530 不同线程组 在JMeter中,正则表达式提取的参数可以跨线程组使用。 通过使用Beanshell后置处理器和属性设置函数,可以将提取的参数设置为全局变量,从而在多个线程组之间共享…...

移动端的每日任务,golang后端数据库应该怎么设计
推荐学习文档 golang应用级os框架,欢迎stargolang应用级os框架使用案例,欢迎star案例:基于golang开发的一款超有个性的旅游计划app经历golang实战大纲golang优秀开发常用开源库汇总想学习更多golang知识,这里有免费的golang学习笔…...

1、Spring Boot 3.x 集成 Eureka Server/Client
一、前言 基于 Spring Boot 3.x 版本开发,因为 Spring Boot 3.x 暂时没有正式发布,所以很少有 Spring Boot 3.x 开发的项目,自己也很想了踩踩坑,看看 Spring Boot 3.x 与 2.x 有什么区别。自己与记录一下在 Spring Boot 3.x 过程…...

Vue根实例、实例总结
在Vue.js框架中,根实例和实例扮演着至关重要的角色。以下是对Vue根实例和实例的总结: Vue根实例 定义与创建: Vue根实例是Vue.js应用的核心。每个Vue应用都是通过用Vue函数创建一个新的Vue实例开始的,这个实例被称为根实例。根实…...

微服务架构:Spring Cloud的服务注册与发现、配置管理、服务网关、熔断器、分布式追踪
微服务架构是一种将应用程序构建为一组小型、自治的服务的方法,每个服务都运行在其独立的进程中,服务间通过轻量级通信机制(通常是HTTP API)进行通信。Spring Cloud是一套基于Spring Boot的微服务解决方案,它提供了一系…...

Spring Boot实现的大学生就业市场解决方案
1系统概述 1.1 研究背景 如今互联网高速发展,网络遍布全球,通过互联网发布的消息能快而方便的传播到世界每个角落,并且互联网上能传播的信息也很广,比如文字、图片、声音、视频等。从而,这种种好处使得互联网成了信息传…...

Ubuntu上安装Git:简单步骤指南
Git是目前世界上最流行的版本控制系统,广泛用于软件开发中。无论你是开发者还是版本控制的新手,Git都是你不可或缺的工具。本文将为你介绍如何在Ubuntu操作系统上安装Git。 什么是Git? Git是一个开源的分布式版本控制系统,由Lin…...

新闻推荐系统:Spring Boot的架构优势
4系统概要设计 4.1概述 本系统采用B/S结构(Browser/Server,浏览器/服务器结构)和基于Web服务两种模式,是一个适用于Internet环境下的模型结构。只要用户能连上Internet,便可以在任何时间、任何地点使用。系统工作原理图如图4-1所示: 图4-1系统工作原理…...

谷歌收录批量查询,谷歌收录批量查询的简单方法
谷歌收录批量查询是网站管理员和SEO优化人员常见的需求,以下提供几种简单且高效的批量查询方法: 一、使用Google Search Console(谷歌搜索控制台) 注册并验证网站: 首先,确保你已经在Google Search Conso…...
)
HarmonyOS NEXT应用开发(一、打造最好用的网络通信模块组件)
随着HarmonyOS NEXT 的发布,越来越多的开发者开始关注如何在这个新平台上高效地进行应用开发。其中网络通信模块的封装尤为关键。纵观HarmonyOS的众多三方网络库及封装,竟没有一个简单好用的。虽然有个axios的鸿蒙版,但有点儿重了也不是很好用…...
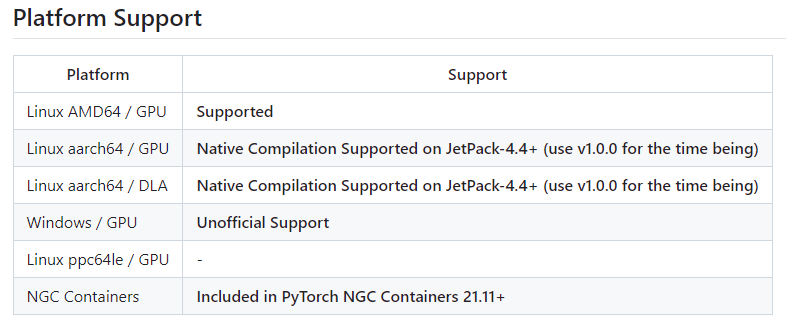
Windows Ubuntu下搭建深度学习Pytorch训练框架与转换环境TensorRT
Windows Ubuntu下搭建深度学习Pytorch训练框架与转换环境TensorRT JetBrains2024(IntelliJ IDEA、PhpStorm、RubyMine、Rider……)安装包Anaconda Miniconda安装.condarc 文件配置镜像源查看conda的配置和源(channel)自定义conda虚拟环境路径conda常用命…...

如何选择合适的BI工具及集成
目录 1 BI工具介绍 1.1 BI工具介绍 1.2 大数据平台与BI工具的集成 2 选择BI工具的考虑因素 2.1 可视化与分析能力 2.2 易用性与学习曲线 2.3 数据源与连接性 2.4 定制化与扩展性 3 案例分析 3.1 案例一:某零售行业的应用 3.2 案例二:某金融企业的应用 3.3 案例三:…...
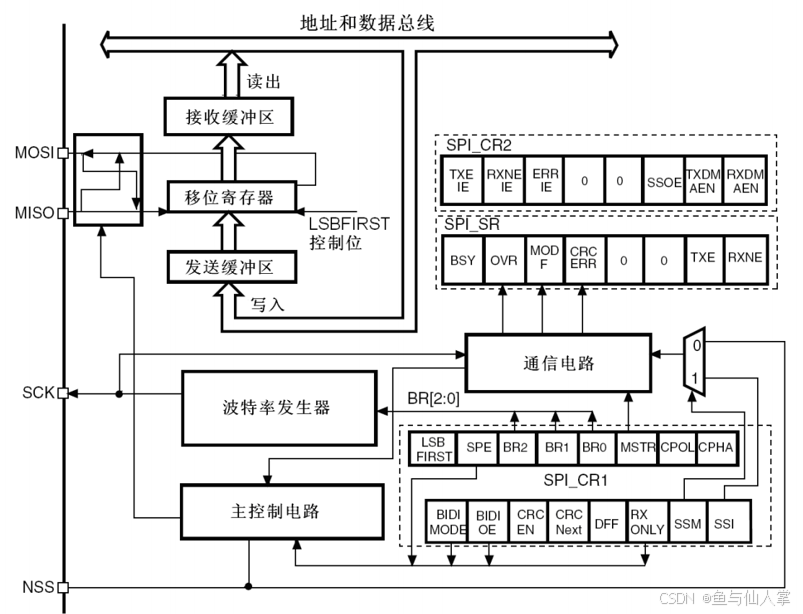
STM32的串行外设接口SPI
一、SPI简介 1.SPI总线特点 (1)四条通信线 SPI需要SCK、MISO、MOSI、NSS四条通信线来完成数据传输 ,每增加一个从机,多一条NSS通信线。 (2)多主多从 SPI总线允许有多个主机和多个从机。 (3&…...

ETT数据集实战:如何用油温预测优化电网负载与设备维护策略
ETT数据集实战:如何用油温预测优化电网负载与设备维护策略 当一座城市的电网在盛夏午后突然崩溃,背后往往隐藏着变压器油温失控的连锁反应。去年某沿海城市电网的故障分析报告显示,超过60%的突发停电事件与变压器过热直接相关——这个数据让行…...
)
Unity3D RPG游戏开发实战:从零搭建角色与场景交互系统(含源码)
1. Unity3D RPG游戏开发基础准备 第一次打开Unity3D时,很多人会被复杂的界面吓到。别担心,我们先从最基础的设置开始。我建议使用2021 LTS版本,这个版本稳定性好,社区支持也完善。安装完成后,记得在Hub里勾选"Wi…...

Google I/O 2026 推出 Antigravity SDK:本地构建 AI Agent,灵活定制功能
Antigravity SDK 登场当开发者需要将 AI 能力嵌入自有应用时,常见做法是通过 API 调用远程 Agent 服务,但这种方式存在延迟高、定制性差、依赖网络等问题。据悉,Google 在 I/O 2026 大会上给出了另一种解法 ---- Antigravity SDK,…...
)
为什么顶级策展人不用Google搜文化新闻?Perplexity文化垂直搜索的5层语义增强架构(含可复用prompt工程模板)
更多请点击: https://kaifayun.com 第一章:为什么顶级策展人不用Google搜文化新闻? 顶级策展人并非排斥搜索引擎,而是早已构建起一套高度结构化、语义化、可验证的信息摄取系统——它绕过关键词匹配的偶然性,直击文化…...

手把手调试:用ADC0804读取PT100变送器信号,51单片机程序里的那些‘坑’怎么避?
51单片机实战:PT100温度检测系统避坑指南与ADC0804深度调试 当我们需要在工业控制或高精度测量场景中实现温度监控时,PT100铂电阻因其出色的线性度和稳定性成为首选传感器。然而,将PT100与51单片机结合使用时,从信号采集到温度显示…...

当AI开始‘看图说话’打假:多模态谣言检测是怎么一步步进化到att-RNN的?
多模态谣言检测的技术演进:从关键词匹配到att-RNN的跨越 社交媒体上每天产生数十亿条内容,其中夹杂着大量真假难辨的信息。传统的人工审核早已无法应对这种规模的信息洪流,而AI技术正逐步成为平台内容治理的核心工具。特别是在视觉内容占比越…...

初创公司如何借助Taotoken降低大模型API的试用与集成门槛
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初创公司如何借助Taotoken降低大模型API的试用与集成门槛 对于初创公司而言,技术选型阶段的效率与成本控制至关重要。在…...

解锁本科论文高效创作新思路,okbiye 赋能毕业生轻松完成学术撰稿
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 引言 步入毕业季,本科阶段最后的学术考核毕业论文,成为众多应届学子面前最大的难题。从前期选题构思、框架梳理&…...
)
告别环境冲突!用Miniconda3在Windows上为不同Python项目创建独立开发环境(保姆级图文)
告别Python环境冲突:Miniconda3在Windows下的高效开发环境管理实战 刚接手新项目的Python开发者小王遇到了一个典型问题:本地运行良好的Django 3.2项目,在同事电脑上却频频报错。经过排查,发现是Python环境版本不一致导致的依赖冲…...

终极GitHub加速解决方案:告别国内访问缓慢的完整指南
终极GitHub加速解决方案:告别国内访问缓慢的完整指南 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 对于众多国内开发…...