STM32的串行外设接口SPI
一、SPI简介
1.SPI总线特点
(1)四条通信线
SPI需要SCK、MISO、MOSI、NSS四条通信线来完成数据传输 ,每增加一个从机,多一条NSS通信线。
(2)多主多从
SPI总线允许有多个主机和多个从机。
(3)传输速率
比常见的I2C协议要快,通常为Mbit级别。
(4)通信方式
是同步全双工串行通信,每次交换一个字节(8bit)或者两个字节(16bit),可选择高位先行或者低位先行。
2.SPI总线术语
-
SCK:串行时钟线,作为主设备的输出、从设备的输入。
-
MISO:主机输入/从机输出数据线,该引脚在主模式下接收数据,在从模式下发送数据。
-
MOSI:主机输出/从机输入数据线,该引脚在主模式下发送数据,在从模式下接收数据。
-
NSS:低电平有效的从机选择线。NSS引脚是可选的,一般选择用软件管理。
3.SPI硬件构成
所有SPI设备的SCK、MOSI、MISO分别连在一起,主机另外引出多条NSS控制线,分别接到各从机的NSS引脚,输出引脚配置为推挽输出,输入引脚配置为浮空或上拉输入。

4.位传输
(1)起始信号
SS引脚从高电平切换到低电平 。

(2)终止信号
SS引脚从低电平切换到高电平 。

5.数据传输模式
在使用STM32的SPI外设时,需要设置时钟相位(CPHA)和时钟极性(CPOL)。
(1)模式0
- CPOL=0:空闲状态时,SCK为低电平
- CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据

(2)模式1
- CPOL=0:空闲状态时,SCK为低电平
- CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据

(3)模式2
- CPOL=1:空闲状态时,SCK为高电平
- CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据

(4)模式3
- CPOL=1:空闲状态时,SCK为高电平
- CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据

二、STM32的SPI外设
1.STM32的SPI外设的特性:
- 8位或16位传输帧格式
- 可选的时钟频率、高/低位先行
- 支持多主模式
- 可触发中断的专用发送和接收标志、主模式故障、过载以及CRC错误标志
- SPI总线忙状态标志
- 支持DMA功能的1字节发送和接收缓冲器,产生发送和接收请求
- 兼容I2S协议
2.STM32 SPI外设的基本结构:
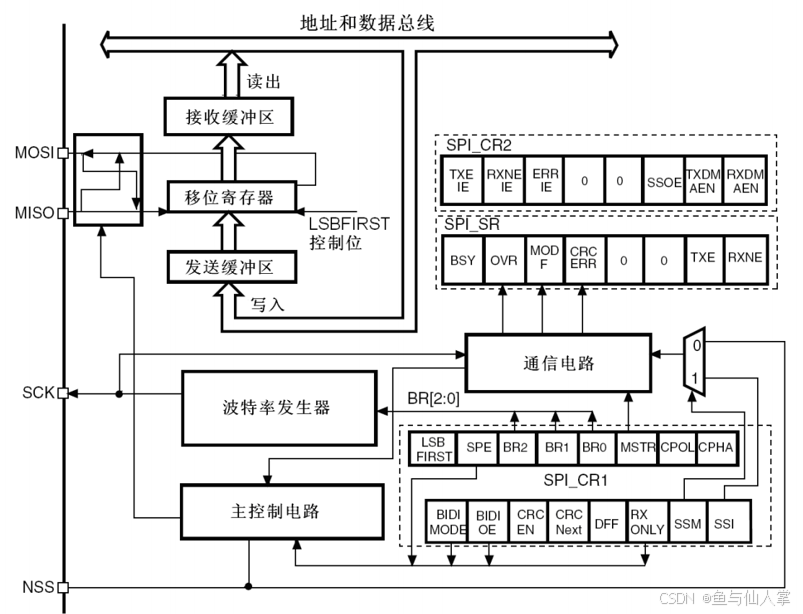
3.状态标志
应用程序可以通过TXE、RXNE和BUSY三个状态标志来完全监控SPI总线的状态。
(1)发送缓冲器空闲标志(TXE)
此标志为1时表示发送缓冲器为空,可以写下一个待发送的数据进入缓冲器中。
(2)接收缓冲器非空标志(RXNE)
此标志为1时表示接收缓冲器中包含有效的接收数据。
(3)忙标志(BUSY)
此标志为1时表示SPI正忙于通信,但有一个例外:在主模式下的双向接收模式下,在接收期间BUSY标志保持为低。
三、STM32 SPI外设的通信方式
1.主模式
在SPI主模式下,MOSI引脚是数据输出,而MISO是数据输入,SCK引脚产生串行时钟。
2.从模式
在 SPI从模式下,MOSI引脚是数据输入,而MISO是数据输出,SCK引脚用于接收来自主机的串行时钟。
四、STM32 SPI外设使用流程
虽然不同器件实现的功能不同,但是只要遵循SPI协议,其通信方式都是一样的,配置流程也基本相同。对于STM32,首先要对SPI进行配置,使其能够正常工作,再结合不同器件的驱动程序,完成STM32与不同器件的数据传输。这里只介绍STM32作为主机的使用流程,使用流程和参考代码如下:
- 配置GPIO
- 配置SPI
- 写一个产生起始条件的函数
- 写一个产生终止条件的函数
- 写一个交换数据的函数
void SPI_W_SS(uint8_t Bit) //根据Bit设置SS引脚的电平
{GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)Bit);
}void SPI_Init(void) //配置GPIO和SPI
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA4引脚初始化为推挽输出,作为NSS片选引脚GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA5和PA7引脚初始化为复用推挽输出,即配置SCK和MOSIGPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6引脚初始化为上拉输入,即配置为MISOSPI_InitTypeDef SPI_InitStructure; SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //模式,选择为SPI主模式SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//方向,选择2线全双工SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //数据宽度,选择为8位SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //先行位,选择高位先行SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_128; //波特率分频,选择128分频SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //SPI极性,选择低极性SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //SPI相位,选择第一个时钟边沿采样,极性和相位决定选择SPI模式0SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS,选择由软件控制SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC多项式,暂不用,给默认值7SPI_Init(SPI1, &SPI_InitStructure); SPI_Cmd(SPI1, ENABLE); //使能SPI1,开始运行MySPI_W_SS(1); //NSS默认高电平
}void MySPI_Start(void) //产生起始信号
{MySPI_W_SS(0); //拉低SS
}void MySPI_Stop(void) //产生终止信号
{MySPI_W_SS(1); //拉高SS
}uint8_t MySPI_SwapByte(uint8_t ByteSend) //交换一个字节数据
{while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) != SET); //等待发送数据寄存器空SPI_I2S_SendData(SPI1, ByteSend); //写入数据到发送数据寄存器,开始产生时序while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) != SET); //等待接收数据寄存器非空return SPI_I2S_ReceiveData(SPI1); //读取接收到的数据并返回
}
代码仅供参考,具体使用需要结合相关从机器件的开发文档。
相关文章:
STM32的串行外设接口SPI
一、SPI简介 1.SPI总线特点 (1)四条通信线 SPI需要SCK、MISO、MOSI、NSS四条通信线来完成数据传输 ,每增加一个从机,多一条NSS通信线。 (2)多主多从 SPI总线允许有多个主机和多个从机。 (3&…...

函数重载
一、概念 C 允许在同一作用域中存在几个功能类似的同名函数,但这些同名函数的形参列表(参数个数 或 类型 或 顺序)必须不同 int Add(int left, int right) {return leftright; }double Add(double left, double right) {return leftright; }long Add(long left, l…...

单例模式:Python中的“独一无二”模式
引言 单例模式是一种常用的设计模式,它确保一个类只有一个实例,并提供一个全局访问点。这种模式在需要控制资源消耗、管理共享资源或者协调系统组件时非常有用。例如,数据库连接、配置文件管理、日志记录等场景。 基础语法介绍 单例模式的…...

C++和OpenGL实现3D游戏编程【连载12】——游戏中音效的使用
🔥C++和OpenGL实现3D游戏编程【目录】 1、游戏中音效的使用 前面我们实现了图片纹理的显示功能,是不是感觉到非常的简单。那么今天我们就继续说下游戏声音的实现。音效也是游戏的灵魂,只有搭配了美妙动听的音效以后,游戏才能令人耳目一新,与玩家产生良好的效果。 音效文…...

Hive数仓操作(八)
一、Hive中的分桶表 1. 分桶表的概念 分桶表是Hive中一种用于提升查询效率的表类型。分桶指的是根据指定列的哈希值将数据划分到不同的文件(桶)中。 2. 分桶表的原理 哈希分桶:根据分桶列计算哈希值,对哈希值取模,将…...
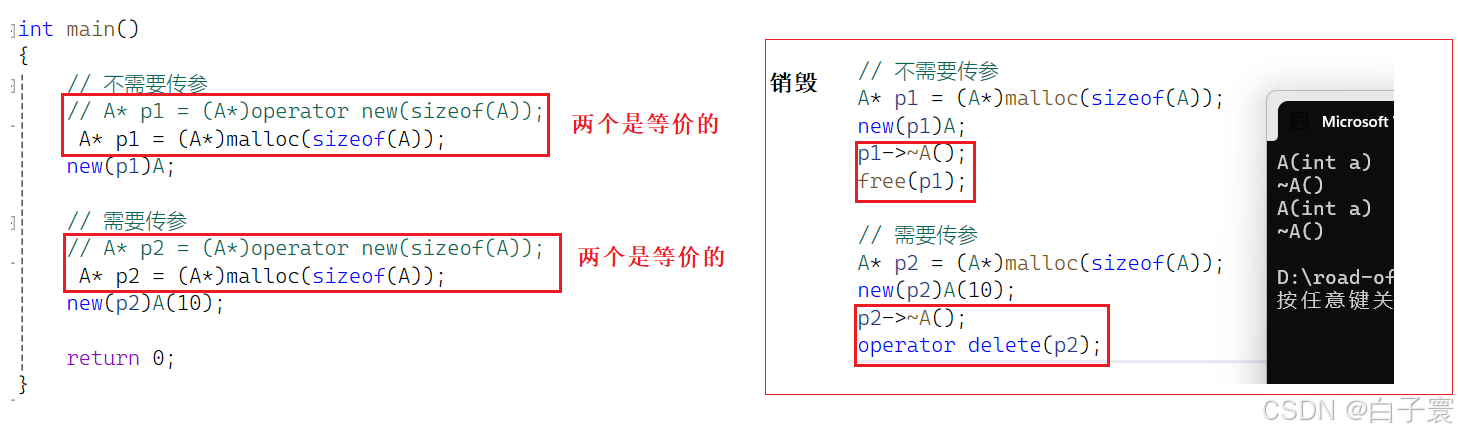
【C++打怪之路Lv6】-- 内存管理
🌈 个人主页:白子寰 🔥 分类专栏:C打怪之路,python从入门到精通,数据结构,C语言,C语言题集👈 希望得到您的订阅和支持~ 💡 坚持创作博文(平均质量分82)&#…...
)
408知识点自检(二)
一、细节题 边界对齐长度是由什么决定的?64位计算机边界按几字节对齐?单周期cpu、多周期cpu、基本流水线cpu、超标量cpu的cpi分别是多少?中断的处理优先级和响应优先级分别由谁决定?动态分区管理需要用什么重定位方式?…...

C语言复习概要(二)
本文目录 C语言中的数组与函数详解1. 引言2. 数组2.1. 什么是数组?语法:示例: 2.2. 数组的初始化示例 1:在声明时初始化示例 2:部分初始化示例 3:运行时赋值 2.3. 数组的访问与修改示例: 2.4. 多…...
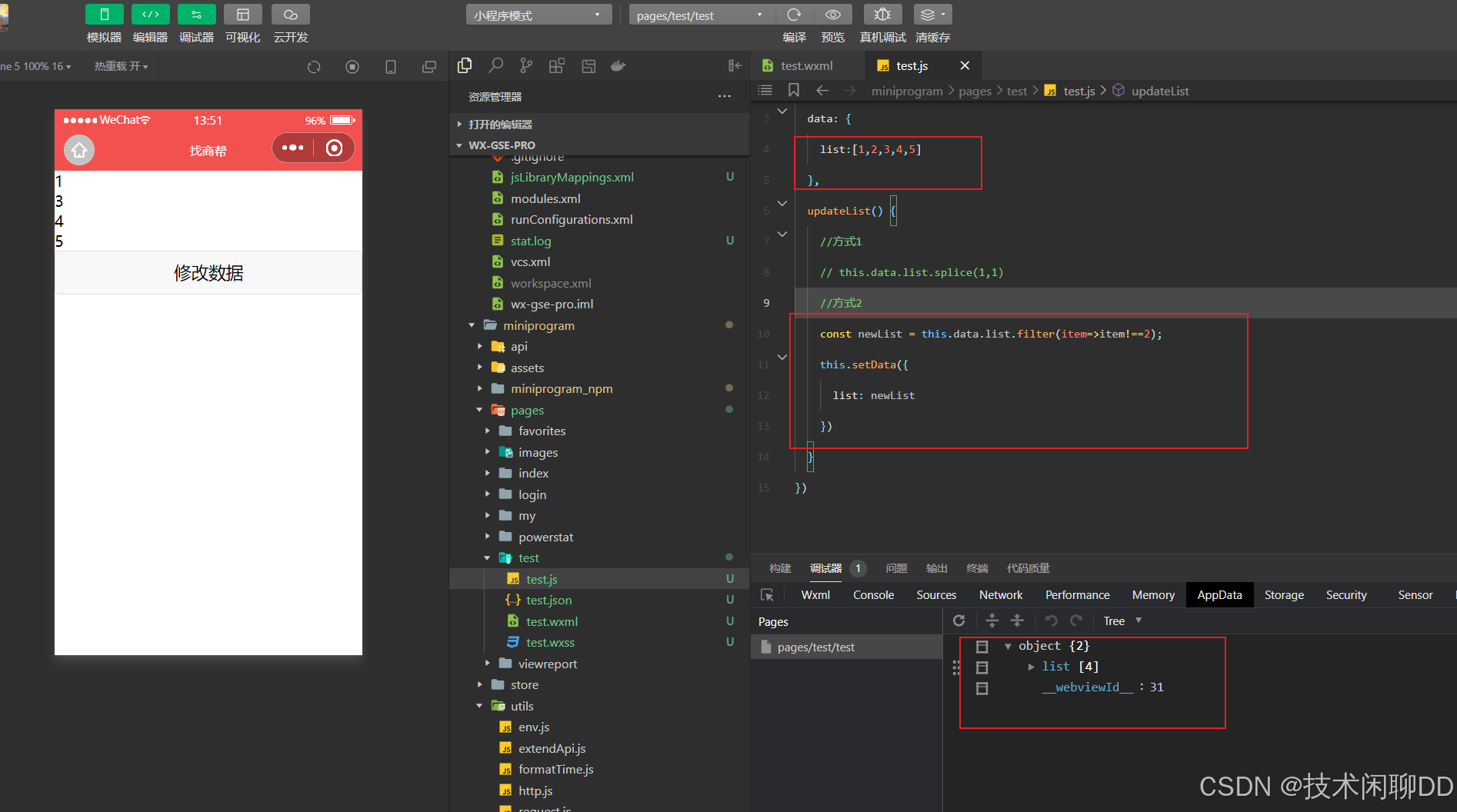
小程序原生-利用setData()对不同类型的数据进行增删改
1. 声明和绑定数据 wxml文件 <view> {{school}} </view> <view>{{obj.name}}</view> <view id"{{id}}" > 绑定属性值 </view> <checkbox checked"{{isChecked}}"/> <!--算数运算--> <view>{{ id …...
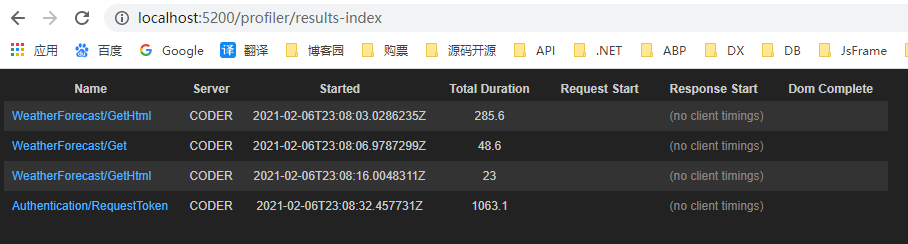
.NET Core 集成 MiniProfiler性能分析工具
前言: 在日常开发中,应用程序的性能是我们需要关注的一个重点问题。当然我们有很多工具来分析程序性能:如:Zipkin等;但这些过于复杂,需要单独搭建。 MiniProfiler就是一款简单,但功能强大的应用…...

【JAVA开源】基于Vue和SpringBoot的旅游管理系统
本文项目编号 T 063 ,文末自助获取源码 \color{red}{T063,文末自助获取源码} T063,文末自助获取源码 目录 一、系统介绍二、演示录屏三、启动教程四、功能截图五、文案资料5.1 选题背景5.2 国内外研究现状5.3 可行性分析5.4 用例设计 六、核…...

信息学奥赛一本通 1885:【14NOIP提高组】寻找道路 | 洛谷 P2296 [NOIP2014 提高组] 寻找道路
【题目链接】 洛谷 P2296 [NOIP2014 提高组] 寻找道路 ybt 1885:【14NOIP提高组】寻找道路 【题目考点】 1. 图论:广搜 2. 图论:反图 【解题思路】 设path数组,path[i]表示顶点i出发到终点t是否有路径。 先求path数组&#…...
JVM 基础、GC 算法与 JProfiler 监控工具详解
目录 1、引言 1.1 JVM内存与本地内存 1.2 JVM与JDK的关系 2、JVM基础 2.1 JVM(Java Virtual Machine) 2.2 Java与JVM的关系 2.3 JVM的内存结构 2.3.1 堆内存 2.3.2 栈内存 2.3.3 方法区 2.3.4 本地方法栈 2.3.5 程序计数器(PC寄存…...
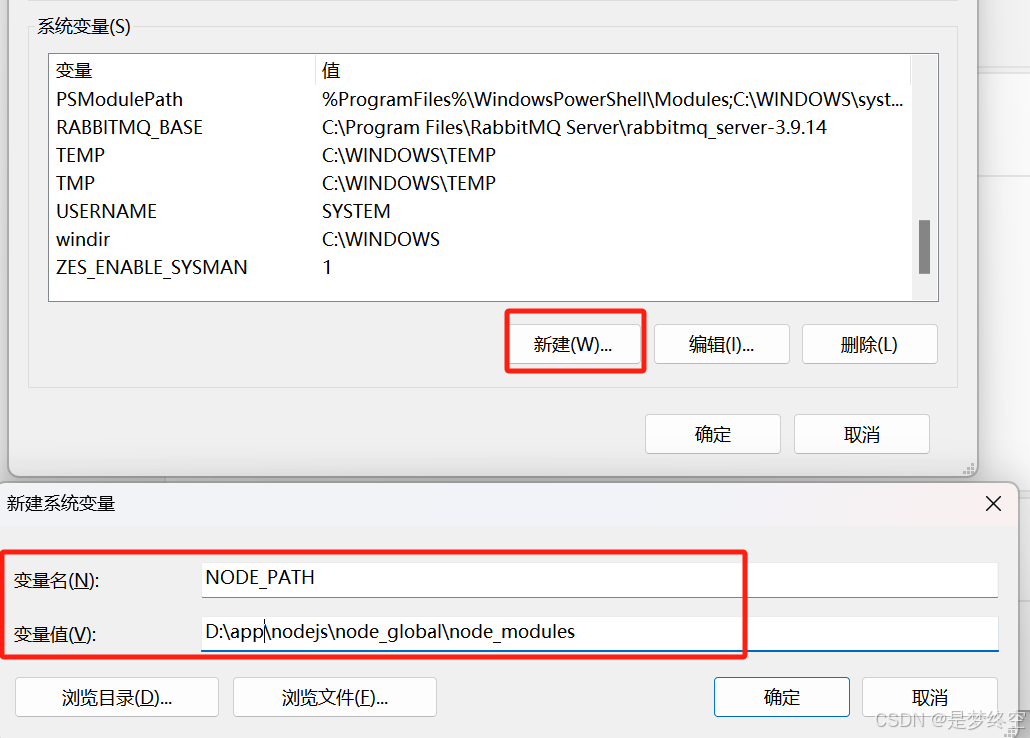
nodejs安装及环境配置
一、下载 进入官网https://nodejs.org/en/download/prebuilt-installer下载node.js安装包,选择对应版本的node,这里我选择的是14.21.3版本 二、安装 1、下载完成后,双击“node-v14.21.3-x64.msi”,开始安装Node.js 2、勾选复…...

无人机电力巡检:点亮电力巡检新视野!
一、无人机电力巡查的优势 提高巡检效率:无人机可以搭载高清摄像头、红外热像仪等先进设备,实时拍摄和传输图像,帮助巡检人员快速发现潜在问题,如电线破损、绝缘子污损、设备过热等,从而大大缩短了巡检周期。 降低人…...

详细介绍:API 和 SPI 的区别
文章目录 Java SPI (Service Provider Interface) 和 API (Application Programming Interface) 的区别详解目录1. 定义和目的1.1 API (Application Programming Interface)1.2 SPI (Service Provider Interface) 2. 使用场景2.1 API 的应用场景2.2 SPI 的应用场景 3. 加载和调…...

【面向对象】设计模式概念和分类
零.前提提要 本文章是我考中级软件设计师时的笔记,基本都是一些自己的思路和见解,现记录一下,希望可以帮助到即将考证的同学。 一.面向对象设计模式的概念 二.面向对象的设计模式分类 设计模式确定了所包含的类和实例、他们的角色和写作方式以…...
)
APK安装包arm64-v8a、armeabi-v7a、x86、x86_64如何区别?(2024年10月1日)
其实就是安卓CPU的进步史 安卓CPU类型: arm64-v8a: 第8代、64位ARM处理器,目前手机大多数是此架构(新手机,可以无脑选择)armeabiv-v7a: 第七代及以上的 ARM 处理器。2011年5月以后生产的大部分安卓设备都使用它armeabi: 第5代、第6代的ARM处理器&#…...

【DataLoom】智能问数 - 自然语言与数据库交互
探索DataLoom的智能问数功能:简化数据库查询 在数据驱动的决策制定中,数据库查询是获取洞察的关键步骤。但是,传统的数据库查询方法往往复杂且技术性强,这限制了非技术用户的使用。DataLoom的智能问数功能正是为了解决这一问题而…...

【Linux】进程地址空间(初步了解)
文章目录 1. 奇怪的现象2. 虚拟地址空间3. 关于页表4. 为什么要有虚拟地址 1. 奇怪的现象 我们先看一个现象: 为什么父子进程从“同一块地址中”读取到的值不一样呢? 因为这个地址不是物理内存的地址 ,如果是物理内存的地址是绝对不可能出…...

AI测试的现状与未来:AI会取代人工测试吗
在软件测试领域,AI技术的崛起正掀起一场深刻变革。从自动化测试用例生成到智能缺陷检测,AI的应用场景不断拓展,效率提升显著。这让众多软件测试从业者不禁心生焦虑:AI是否会彻底取代人工测试?要解答这个问题࿰…...

别再死记硬背GitFlow命令了!用SourceTree图形化工具5分钟搞定团队协作流程
告别GitFlow命令行恐惧:用SourceTree可视化工具高效管理团队协作 在中小型技术团队中,版本控制是日常开发不可或缺的环节,但传统的GitFlow工作流常常让非命令行爱好者望而生畏。当团队成员水平参差不齐时,频繁的git merge --no-ff…...
)
告别手动配置!用Matlab+LUA脚本自动化DCA1000雷达数据采集(附1843配置实例)
雷达数据采集自动化:Matlab与LUA脚本的高效协作方案 在毫米波雷达研发领域,数据采集是每个工程师日常工作中不可或缺的环节。传统的手动配置方式不仅耗时耗力,还容易因人为操作失误导致数据质量不稳定。本文将介绍如何通过Matlab与LUA脚本的协…...

JavaScript进阶:ES6+特性与异步编程
JavaScript进阶:ES6特性与异步编程 1. 技术分析 1.1 ES6概述 ES6为JavaScript带来了革命性的改进: ES6特性变量声明: let, const箭头函数: () > {}解构赋值: const {a, b} obj类: class语法模块化: import/export异步编程:Promiseasync/awaitGenerat…...

2026年数字人拍摄新方式:一条视频能省多少时间
2026年数字人拍摄新方式:一条视频能省多少时间 【导语】 做视频最耗时间的是什么?不是拍摄那几分钟,而是前期的准备工作。但现在有一种新方式,可以让你完全不用拍摄真人,一条视频从准备到成片,最快只要7分钟…...
)
工业网络零中断的秘密:手把手教你理解并配置PRP协议(基于IEC 62439-3)
工业网络零中断的秘密:手把手教你理解并配置PRP协议(基于IEC 62439-3) 在钢铁厂轧机轰鸣的生产线上,或是高铁信号控制系统的毫秒级响应中,任何网络中断都意味着数百万损失甚至安全事故。传统冗余技术如RSTP需要秒级收敛…...

5.20 明天见!拿好这份参会指南|AIGC2026峰会
组委会 发自 凹非寺量子位|公众号 QbitAI明天5月20日,09:30,中国AIGC产业峰会准时开场。提前查好路况,定好闹钟,我们现场见。所有人,马上AI起来。明天聊什么?议程帮你划重点上午场:A…...

Linux常用命令合集:从新手到高手的核心操作指南
1. 项目概述:为什么我们需要一个“常用命令合集”?在Linux世界里摸爬滚打十几年,我见过太多新手,也包括一些从其他平台转过来的老手,面对黑漆漆的终端窗口时那种手足无措的茫然。Linux的强大,根植于其命令行…...
)
别再死循环了!手把手教你用Python实现D*算法(附完整代码与避坑指南)
从理论到实践:Python实现D*算法的工程化指南与避坑策略 路径规划中的动态适应挑战 在机器人导航和游戏AI开发中,路径规划算法扮演着至关重要的角色。传统算法如A*和Dijkstra虽然能有效解决静态环境下的路径规划问题,但在动态变化的环境中却显…...

给UR5e机械臂动力学建模做减法:一个简化模型在C++中的实现与验证
UR5e机械臂动力学建模的工程实践:从理论简化到C实现 在工业机器人领域,UR5e作为Universal Robots的经典协作机械臂,以其轻量化设计和安全性能广泛应用于装配、检测等场景。然而,当我们需要为其开发高级控制算法时,完整…...