crash 内核调试工具 ps 指令 显示的进程状态 RU, IN, UN, ZO, ST, TR, DE, SW, WA, PA 什么意思
crash> help ps | grep "the task state"5. the task state (RU, IN, UN, ZO ,ST, TR, DE, SW, WA, PA, ID, NE)参考linux-4.19.113内核源码(include/linux/sched.h),有如下定义
/** Task state bitmask. NOTE! These bits are also* encoded in fs/proc/array.c: get_task_state().** We have two separate sets of flags: task->state* is about runnability, while task->exit_state are* about the task exiting. Confusing, but this way* modifying one set can't modify the other one by* mistake.*//* Used in tsk->state: */
#define TASK_RUNNING 0x0000
#define TASK_INTERRUPTIBLE 0x0001
#define TASK_UNINTERRUPTIBLE 0x0002
#define __TASK_STOPPED 0x0004
#define __TASK_TRACED 0x0008
/* Used in tsk->exit_state: */
#define EXIT_DEAD 0x0010
#define EXIT_ZOMBIE 0x0020
#define EXIT_TRACE (EXIT_ZOMBIE | EXIT_DEAD)
/* Used in tsk->state again: */
#define TASK_PARKED 0x0040
#define TASK_DEAD 0x0080
#define TASK_WAKEKILL 0x0100
#define TASK_WAKING 0x0200
#define TASK_NOLOAD 0x0400
#define TASK_NEW 0x0800
#define TASK_STATE_MAX 0x1000/* Convenience macros for the sake of set_current_state: */
#define TASK_KILLABLE (TASK_WAKEKILL | TASK_UNINTERRUPTIBLE)
#define TASK_STOPPED (TASK_WAKEKILL | __TASK_STOPPED)
#define TASK_TRACED (TASK_WAKEKILL | __TASK_TRACED)#define TASK_IDLE (TASK_UNINTERRUPTIBLE | TASK_NOLOAD)/* Convenience macros for the sake of wake_up(): */
#define TASK_NORMAL (TASK_INTERRUPTIBLE | TASK_UNINTERRUPTIBLE)/* get_task_state(): */
#define TASK_REPORT (TASK_RUNNING | TASK_INTERRUPTIBLE | \TASK_UNINTERRUPTIBLE | __TASK_STOPPED | \__TASK_TRACED | EXIT_DEAD | EXIT_ZOMBIE | \TASK_PARKED)即:
| RU | TASK_RUNNING | 可执行状态或运行状态 |
| IN | TASK_INTERRUPTIBLE | 可中断阻塞状态 |
| UN | TASK_UNINTERRUPTIBLE | 不可中断阻塞状态 |
| ZO | EXIT_ZOMBIE | 僵死状态 |
| ST | TASK_STOPPED | 暂停状态 |
| TR | TASK_TRACED | 跟踪状态 |
| DE | TASK_DEAD (EXIT_DEAD ?) | 退出状态 |
| SW | ? | |
| WA | TASK_WAKEKILL? TASK_WAKING? | |
| PA | TASK_PARKED | ? |
| ID | TASK_IDLE | 空闲? |
| NE | TASK_NEW | 新建? |
参考: Linux进程状态及其相互转换_linux进程状态转换图_刘鹏加油呀的博客-CSDN博客
相关文章:

crash 内核调试工具 ps 指令 显示的进程状态 RU, IN, UN, ZO, ST, TR, DE, SW, WA, PA 什么意思
crash> help ps | grep "the task state" 5. the task state (RU, IN, UN, ZO ,ST, TR, DE, SW, WA, PA, ID, NE) 参考linux-4.19.113内核源码(include/linux/sched.h),有如下定义 /** Task state bitmask. NOTE! These bits…...

Spring《二》bean的实例化与生命周期
🍎道阻且长,行则将至。🍓 上一篇:Spring《一》快速入门 下一篇:Spring《三》DI依赖注入 目录一、bean实例化🍍1.构造方法 ***2.静态工厂 *使用工厂创建对象实例化bean3.实例工厂 ***使用示例工厂创建对象实…...

java与kotlin 写法区别
原文链接:https://gitcode.net/mirrors/mindorksopensource/from-java-to-kotlin?utm_sourcecsdn_github_accelerator#assigning-the-null-value Print to Console 打印到控制台 Java System.out.print("Amit Shekhar"); System.out.println("Amit…...

服务器运行深度学习代码使用指南
该内容配置均在九天毕昇下配置。 当前系统使用的linux版本为:Ubuntu 18.04 LTS。 当前版本安装的是:cuda10.1。 九天毕昇平台:https://jiutian.10086.cn/edu/#/home 一、linux下运行python的操作 ls 为列出当前目录中的文件 cd 文件名 进入…...
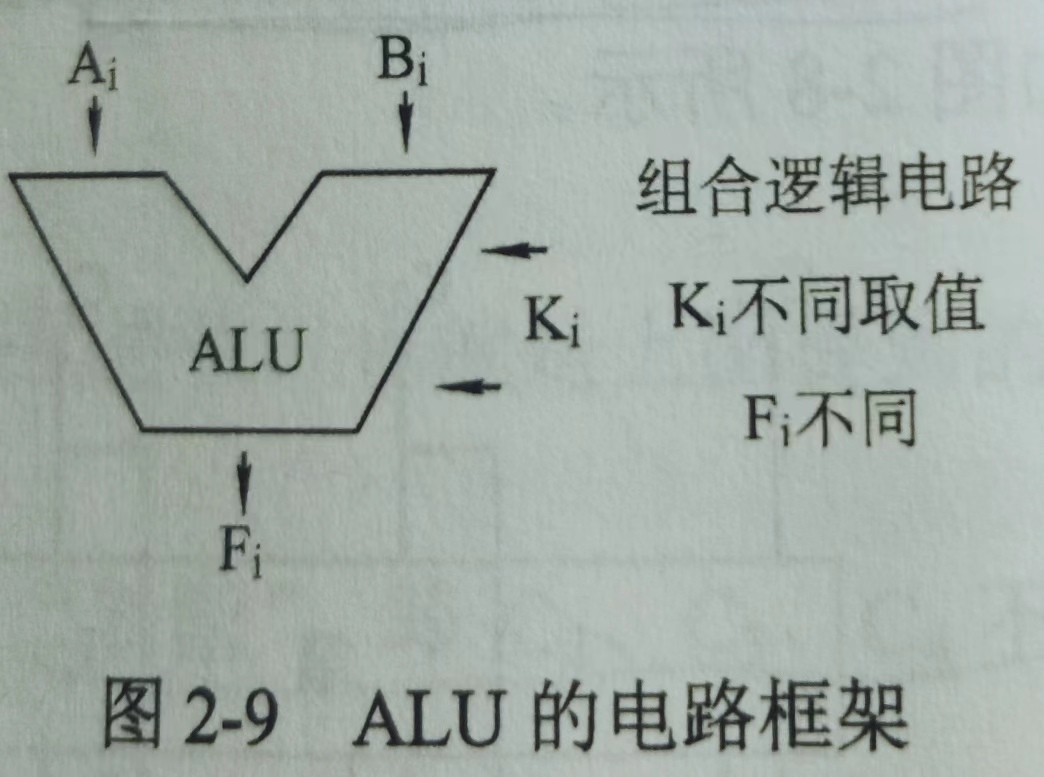
计算机组成原理 - 2. 数据的表示和运算
整理自天勤高分笔记,购书链接: 24 天勤高分笔记 要记住的几个数字 📓: 215327682^{15} 3276821532768 216655362^{16} 6553621665536 23121474836482^{31} 21474836482312147483648 23242949672962^{32} 4294967296232429496…...

【js】基础知识点--语句,break和continue,switch,with,for..in,do-while,while
一、break和continue语句,常用 break 语句会立即退出循环,强制继续执行循环后面的语句。而 continue 语句虽然也是立即退出循环,但退出循环后会从循环的顶部继续执行 var num 0; for (var i1; i < 10; i) {if (i % 5 0) {break;}num; …...
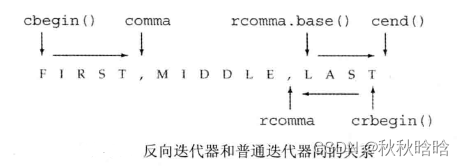
【C++】迭代器
内容来自《C Primer(第5版)》9.2.1 迭代器、9.2.3 begin和end成员、9.3.6 容器操作可能使迭代器失效、10.4.3 反向迭代器 目录 1. 迭代器 1.1 迭代器范围 1.2 使用左闭合范围蕴含的编程假定 2. begin和end成员 3. 容器操作可能使迭代器失效 3.1 编…...

数据可视化在前端中的应用
前端开发中,数据可视化是一种非常重要的技术。它可以将复杂的数据以图形化的方式展示出来,让用户更容易理解和分析数据。在前端中,VUE是一种非常流行的JavaScript框架,可以用来实现各种数据可视化效果。 首先,让我们来看看一些常见的数据可视化方式: 表格:表格是数据可…...

FFmpeg 合并视频文件没声音,不同步原因
查了不少帖子也没搞明白,可能懂的人不会遇到吧。 1 没声音是因为我几个视频文件中,有的没音轨,就是用文字生成了个视频,需要先给它加个dummy的音轨才行。 2 视频不同步是因为各个视频格式不一样,参数挺多我也不知道具…...
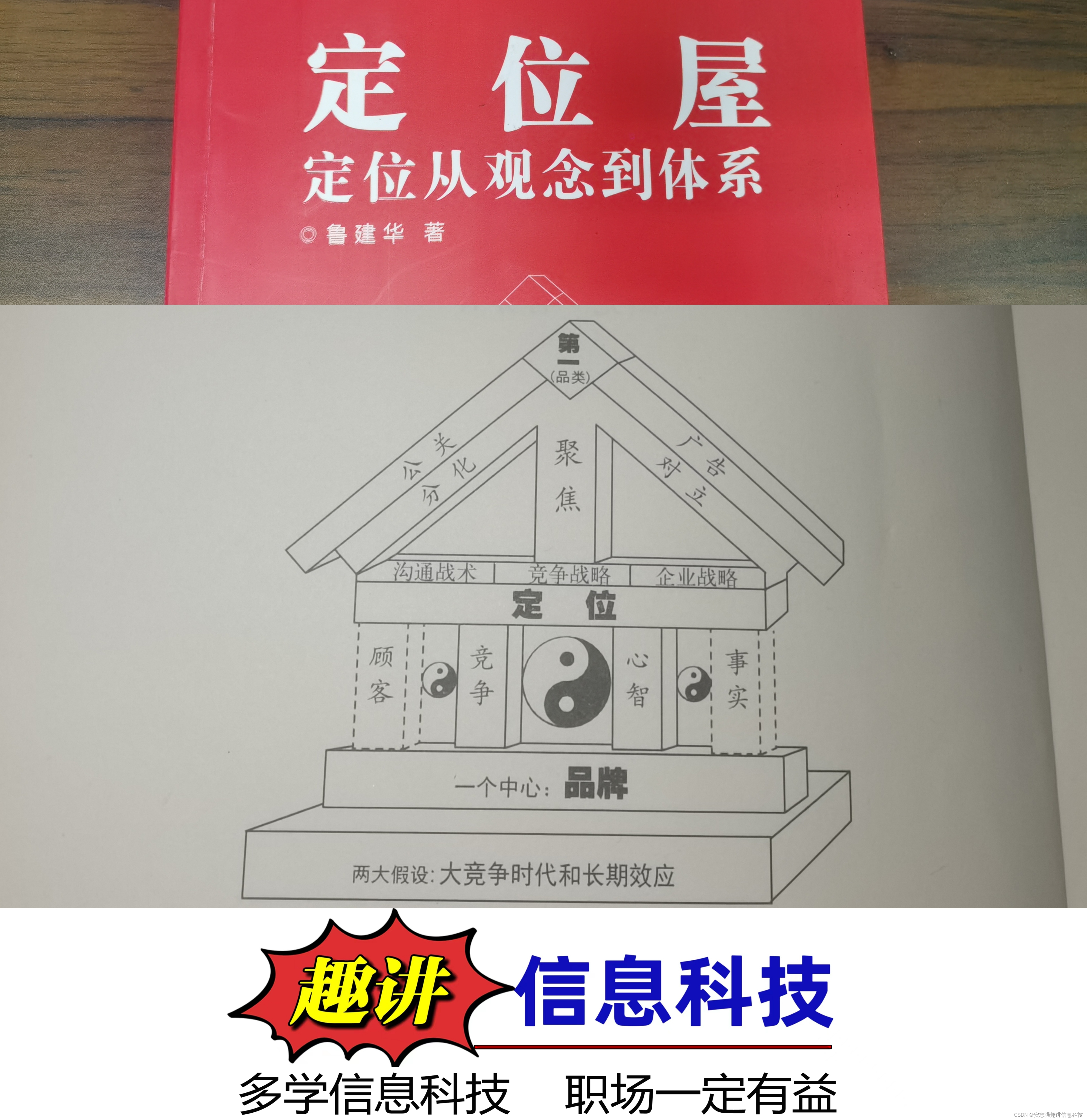
绕不开的“定位”
绕开“定位”这个词谈企业战略和品牌 相当于揪住头发离开地球 定位这个词,已经进入商业界的心智中去了 发明这个词的特劳特和里斯的思想有啥差异? 《定位屋》刨析的很到位 趣讲大白话:把握概念的源头,就理解对了大部分 【趣讲信息…...
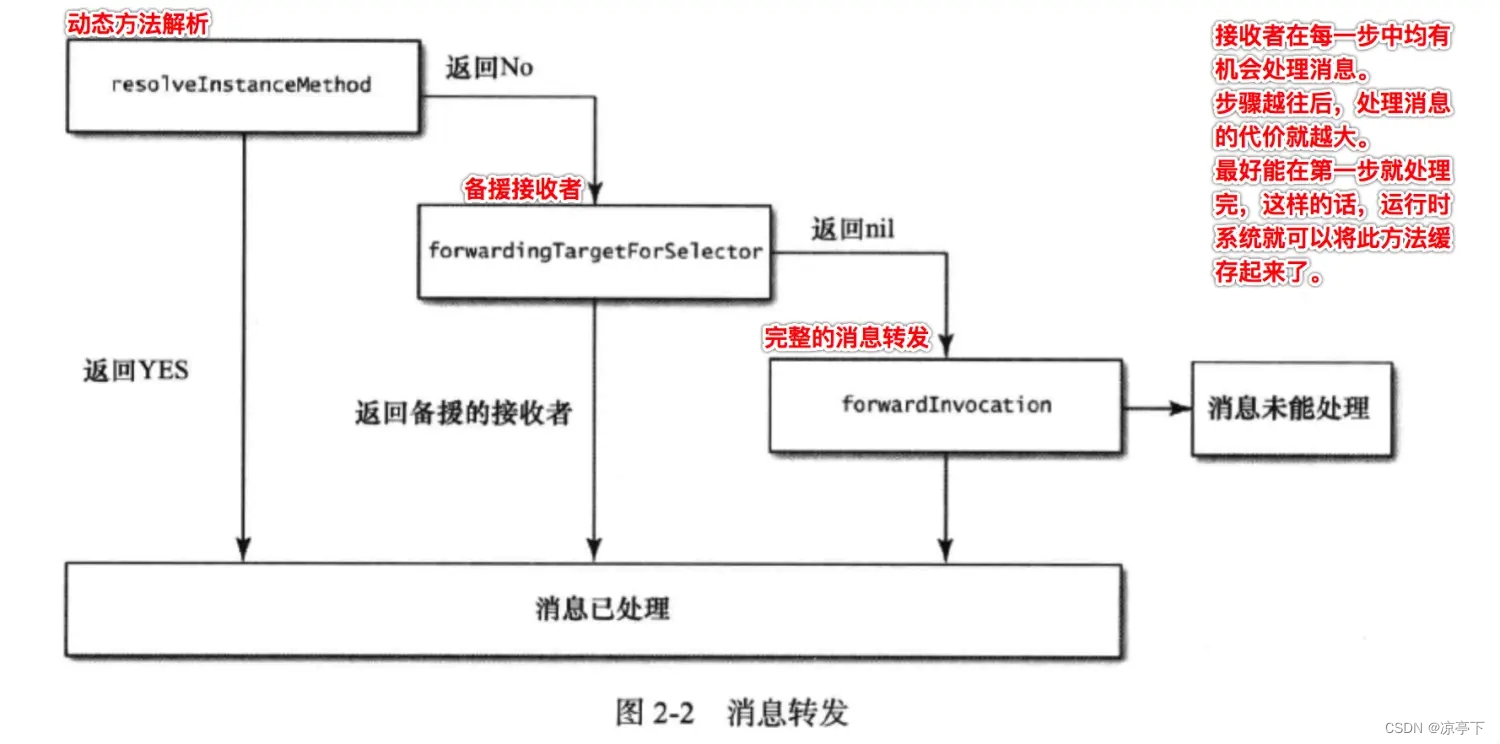
《Effective Objective-C 2.0 》 阅读笔记 item12
第12条:理解消息转发机制 1. 消息转发机制 当对象接收到无法解读的消息后,就会启动“消息转发”机制,开发者可经由此过程告诉对象应该如何处理未知消息。 消息转发分为两大阶段 第一阶段:先征询接收者所属的类,看其…...

云原生计算能消除技术债务吗?
云原生计算可以将行业领域驱动的设计、GitOps和其他现代软件最佳实践汇总起来,如果企业实施得当,可以减少技术债务。 云原生计算是企业IT的一种新范式,它涉及现代技术的方方面面,从应用程序开发到软件架构,再到保持一…...

9. 回文数
题目 给你一个整数 xxx ,如果 xxx 是一个回文整数,返回 truetruetrue ;否则,返回 falsefalsefalse 。回文数是指正序(从左向右)和倒序(从右向左)读都是一样的整数。 例子 输入&am…...

[SV]SystemVerilog线程之fork...join专题
SystemVerilog线程之fork...join专题 Q:fork-join_none开辟的线程在外部任务退出后也会结束吗? A:后台线程不会结束,任何由fork开辟的线程(join、join_any、join_none),无论其外部任务ÿ…...
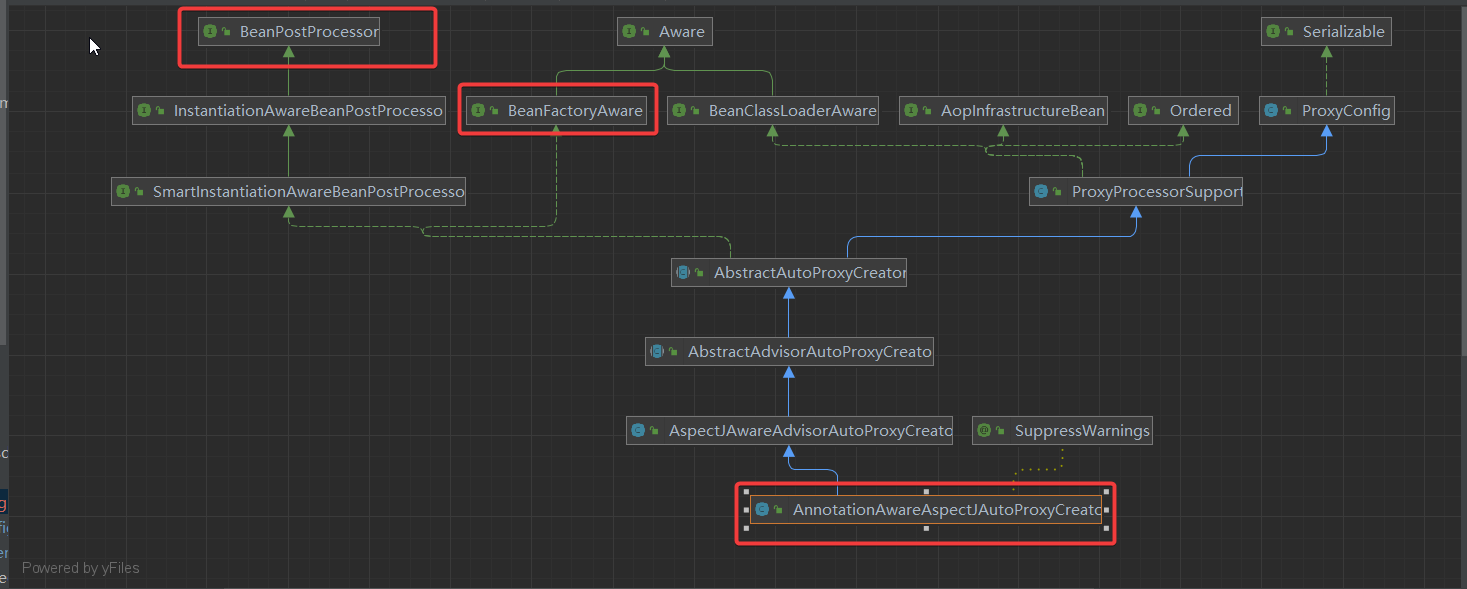
你看这个spring的aop它又大又宽
aop🚓AOP 分类AspectJ | 高级但是难用Spring AOP | 易用但仅支持方法aop 原理明月几时有,把酒问青天。——唐代李白《将进酒》 AOP 分类 在 Spring Boot 中,AOP 的实现主要有以下几种: 基于 AspectJ 的 AOP:这是一种基…...

设计模式-创建-单例模式
4.1.1 模式介绍 定义 单例模式(Singleton Pattern)是 Java 中最简单的设计模式之一,此模式保证某个类在运行期间,只有一个实例对外提供服务,而这个类被称为单例类。 作用 保证一个类只有一个实例为该实例提供一个全…...
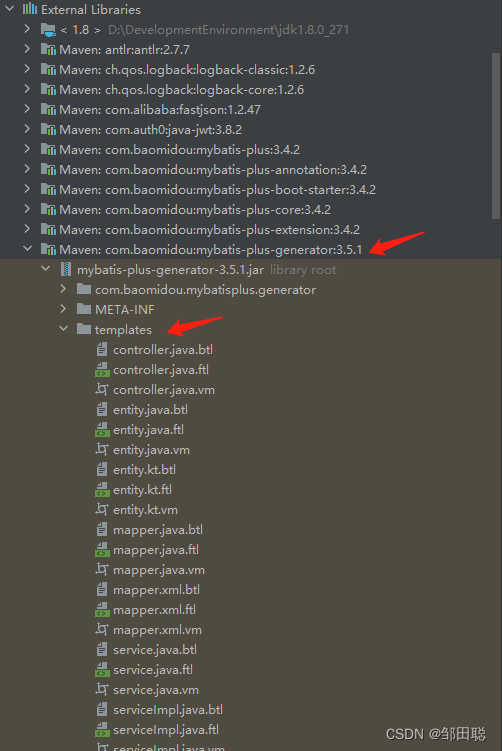
使用mybatis-plus-generator配置一套适合你的CRUD
1、maven引入 mybatis-plus-generator 和模板引擎,你也可以使用freemarker之类的,看个人 <!-- mybatisplus代码生成器 --><dependency><groupId>com.baomidou</groupId><artifactId>mybatis-plus-generator</artifactI…...
)
MATLAB实现各种离散概率密度函数(概率密度/分布/逆概率分布函数)
MATLAB实现各种离散概率密度函数(概率密度/分布/逆概率分布函数) 1 常见离散概率分布的基本信息2 常见离散概率分布计算及MATLAB实现2.1 二项分布(Binomial Distribution)2.1.1 常用函数2.2 负二项分布(Negative Binomial Distribution)2.2.1 常用函数2.3 几何分布(Geom…...

指针的基本知识
我们不会用bit去表达一个数据,因为只能放0和1,能表达的数据太少了,内存地址最小单位是字节 11111111 0x0011 1字节8bit,8bit才算作一个地址,地址是以字节为最小单位&#…...
当你的IDE装上GPT
文章目录前言下载安装使用步骤前言 我们可能要从“CV”工程师变成“KL工程师了,为什么叫”KL“工程师呢, 因为只要K和L两个指令就可以直接生成代码、修改代码,哪行代码不会点哪里,他都给你解释得明明白白。 提示:以下…...

在OpenClaw中快速接入Taotoken实现AI助手功能
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在OpenClaw中快速接入Taotoken实现AI助手功能 OpenClaw是一款功能强大的AI助手工具,能够帮助开发者进行代码生成、问题…...

ClaudeCodeAnywhere:构建安全AI代码执行器的架构与实战
1. 项目概述:一个让Claude“无处不在”的代码执行器最近在开发者圈子里,一个名为“ClaudeCodeAnywhere”的项目引起了我的注意。简单来说,它解决了一个非常具体且高频的痛点:如何让像Claude这样的AI助手,能够安全、便捷…...

Spread.NET 10-19.1 都可以提供
关于 Spread.NET提供类似 Excel 的电子表格体验。Spread.NET 可帮助您创建电子表格、网格、仪表板和窗体。它包含一个强大的计算引擎,提供 450 多个函数,并支持导入和导出 Excel 电子表格。利用丰富的 .NET 电子表格 API 和强大的计算引擎,您…...

Apple Silicon Mac原生Linux游戏体验:Asahi Linux驱动突破与实战指南
1. 项目概述:当Apple Silicon Mac遇见原生Linux游戏如果你和我一样,既是Mac用户,又对在Linux系统上折腾抱有热情,那么最近Asahi Linux项目的进展绝对会让你心跳加速。长久以来,在搭载Apple Silicon(M1、M2、…...

使用Python快速接入Taotoken并切换不同模型进行对话测试
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Python快速接入Taotoken并切换不同模型进行对话测试 本文面向希望快速上手Taotoken平台的Python开发者。我们将通过一份最小化…...

三维姿态表达:从欧拉角、旋转矩阵到四元数的工程实践
1. 三维姿态表达的基础概念 在三维空间中描述物体的姿态(orientation)是许多工程领域的核心需求,无论是卫星姿态控制、机器人运动规划,还是游戏开发中的角色动画,都需要精确的姿态表达方式。姿态描述的本质是回答一个问…...

5分钟重塑游戏性能管理:DLSS Swapper带来的工作流革命
5分钟重塑游戏性能管理:DLSS Swapper带来的工作流革命 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 痛点洞察:当DLSS管理成为游戏玩家的技术负担 作为一名现代PC游戏玩家,你是否曾…...

【职场】职场上,从不发脾气的人,最值得警惕
职场上,从不发脾气的人,最值得警惕“真正危险的人,从来不是那个拍桌子的人。而是那个,永远在微笑的人。”一、你身边有没有这种人 开会的时候,无论发生什么,他都面带微笑。 被否定了,点头&#…...

不止Keil5:VSCode+GCC也能玩转GD32单片机?手把手教你搭建轻量级开发环境
超越Keil5:用VSCodeGCC打造高效GD32开发环境 在嵌入式开发领域,Keil MDK长期以来一直是ARM架构单片机开发的主流选择。然而,随着现代开发工具的演进,越来越多的开发者开始寻求更轻量、更灵活且完全免费的替代方案。本文将带你探索…...

3分钟上手QrazyBox:让损坏的二维码“起死回生“的终极修复工具
3分钟上手QrazyBox:让损坏的二维码"起死回生"的终极修复工具 【免费下载链接】qrazybox QR Code Analysis and Recovery Toolkit 项目地址: https://gitcode.com/gh_mirrors/qr/qrazybox 你是否曾经遇到过这样的场景:打印出来的二维码被…...