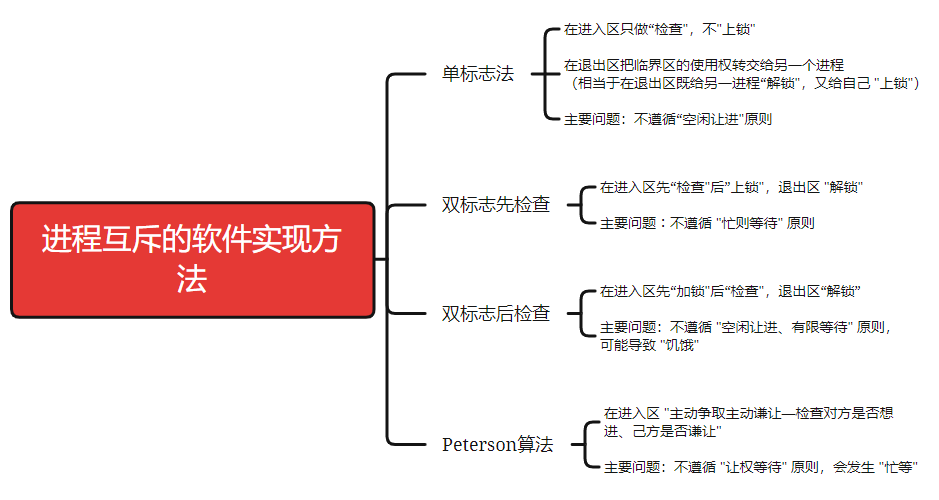
2.12、进程互斥的软件实现方法
学习提示:
- 理解各个算法的思想、原理
- 结合上小节学习的 “实现互斥的四个逻辑部分”,重点理解各算法在进入区、退出区都做了什么
- 分析各算法存在的缺陷(结合 “实现互斥要遵循的四个原则” 进行分析)
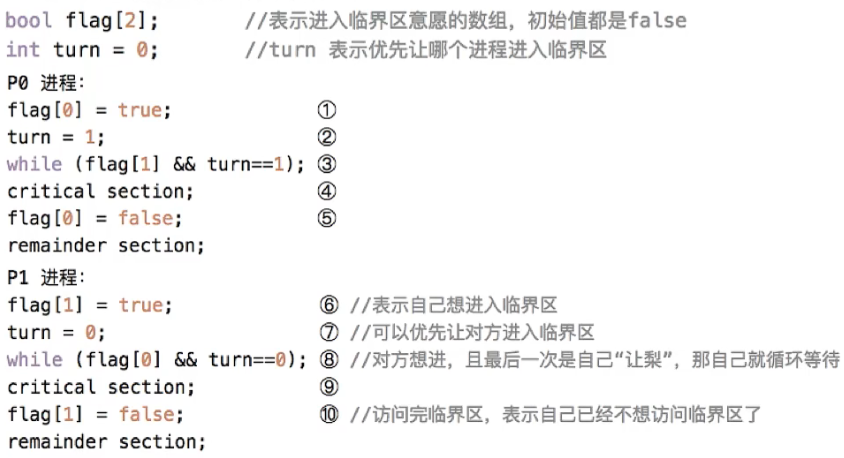
1、单标志法
算法思想:两个进程在访问完临界区后会把使用临界区的权限转交给另一个进程。
- 也就是说每个进程进入临界区的权限只能被另一个进程赋予\color{red}每个进程进入临界区的权限只能被另一个进程赋予每个进程进入临界区的权限只能被另一个进程赋予
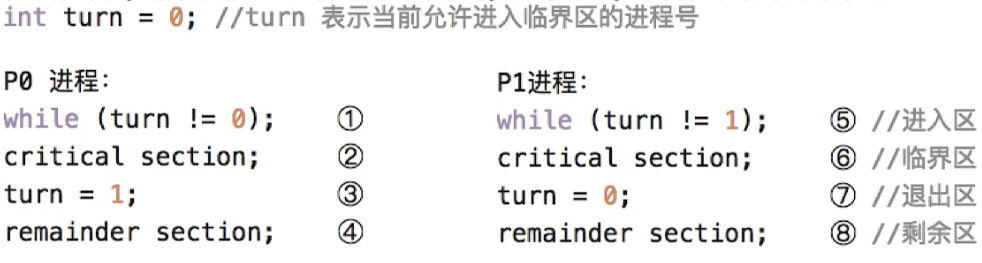
turn 的初值为 0,即刚开始只允许 0 号进程进入临界区。
若 P1 先上处理机运行,则会一直卡在 ⑤。直到 P1 的时间片用完,发生调度,切换 P0 上处理机运行。
代码 ① 不会卡住 P0,P0 可以正常访问临界区,在 P0 访问临界区期间即时切换回 P1,P1 依然会卡在⑤。
只有 P0 在退出区将 turn 改为 1 后,P1 才能进入临界区。
因此,该算法可以实现 “同一时刻最多只允许一个进程访问临界区”
turn 表示当前允许进入临界区的进程号,而只有当前允许进入临界区的进程在访问了临界区之后,才会修改 turn 的值。
- 也就是说,对于临界区的访问,一定是按 P0→P1→P0→P1→…这样轮流访问。
这种必须 “轮流访问” 带来的问题是,
- 如果此时允许进入临界区的进程是
P0,而P0一直不访问临界区,那么虽然此时临界区空闲,但是并不允许P1访问。
因此,单标志法存在的主要问题是:
- 违背空闲让进原则\color{red}违背空闲让进原则违背空闲让进原则。
2、双标志先检查法
算法思想:设置一个布尔型数组 flag[] ,数组中各个元素用来标记各进程想进入临界区的意愿,
- 比如 “flag[0] = true” 意味着 0 号进程
P0现在想要进入临界区。
每个进程在进入临界区之前先检查当前有没有别的进程想进入临界区,
- 如果没有,则把自身对应的标志 flag[i] 设为 true,之后开始访问临界区。
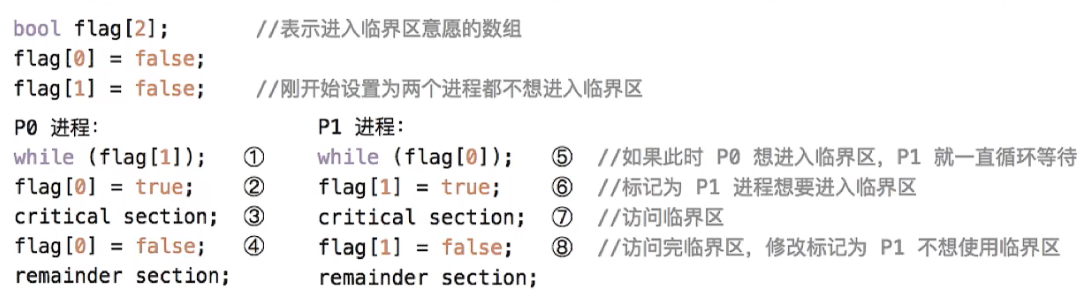
若按照 ①⑤②⑥③⑦… 顺序执行,P0 和 P1 将会同时访问临界区。
因此,双标志先检查法存在的主要问题是:
- 违背忙则等待原则\color{red}违背忙则等待原则违背忙则等待原则。
原因在于,进入区的 “检查” 和 “上锁” 两个处理不是一气呵成的。“检查” 后,“上锁” 前可能发生讲程切换
3、双标志后检查法
算法思想:双标志先检查法的改版。前一个算法的问题是先 “检查” 后 “上锁” ,但是这两个操作又无法一气呵成,因此导致了两个进程同时进入临界区的问题。
- 因此,人们又想到先 “上锁” 后 “检查” 的方法,来避免上述问题。
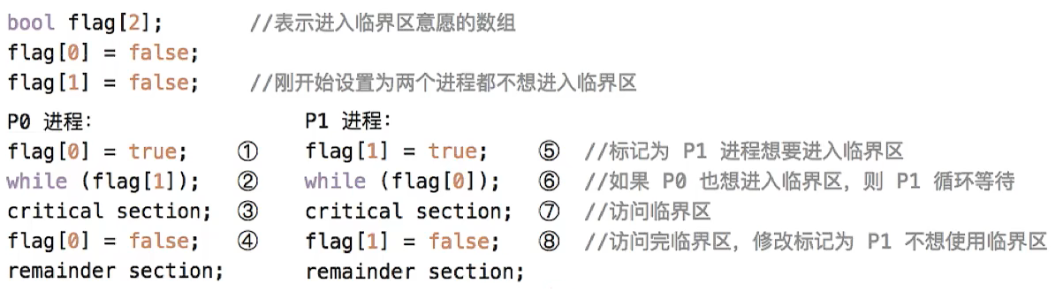
若按照 ①⑤②⑥… 的顺序执行,P0 和 P1 将都无法进入临界区
- 相当于死锁,两方都一直等待对方
因此,双标志后检查法虽然解决了 “忙则等待” 的问题,
- 但是又违背了空闲让进和有限等待原则\color{red}又违背了空闲让进和有限等待原则又违背了空闲让进和有限等待原则
会因各进程都长期无法访问临界资源而产生 “饥饿” 现象。
两个进程都争着想进入临界区,但是谁也不让谁,最后谁都无法进入临界区。
4、Peterson 算法
算法思想:双标志后检查法中,两个进程都争着想进入临界区,但是谁也不让谁,最后谁都无法进入临界区。
Gary L.Peterson 想到了一种方法,如果双方都争着想进入临界区,那可以让进程尝试 “孔融让梨” ,主动让对方先使用临界区。
两种双标志法的问题都是由于进入区的几个操作不能一气呵成导致的。
我们可以推理验证在 Peterson 算法中,两个进程进入区中的各个操作按不同的顺序穿插执行会发生什么情况:
-
①②③⑥⑦⑧…
-
①⑥②③…
因为 turn 只有一个,必然有一个判断是 false,所以不会产生死锁
抛开 turn 不谈,就回到了双标志后检查法,所以不会出现单标志法的问题
- 单标志法的问题:如果此时允许进入临界区的进程是
P0,而P0一直不访问临界区,那么虽然此时临界区空闲,但是并不允许P1访问。
进入区:
- 主动争取;
- 主动谦让;
- 检查对方是否也想使用,且最后一次是不是自己说了“客气话”
例如:
-
香香想用马桶,如果需要的话,可以先让臭臭用,
检查发现臭臭不需要,于是香香访问临界区—―马桶。
-
臭臭想用马桶,可以让香香先用
香香想用马桶,可以让臭臭先用
经检查发现香香也要使用,但最后是臭臭说了 “客气话”,因此臭臭循环等待
Peterson 算法用软件方法解决了进程互斥问题,
-
遵循了空闲让进、忙则等待、有限等待三个原则\color{red}遵循了空闲让进、忙则等待、有限等待三个原则遵循了空闲让进、忙则等待、有限等待三个原则
-
但是依然未遵循让权等待\color{red}未遵循让权等待未遵循让权等待的原则。
Peterson 算法相较于之前三种软件解决方案来说,是最好的,但依然不够好。
5、整体框架
上述并不是概览,不同的算法应该相应的分析
相关文章:
2.12、进程互斥的软件实现方法
学习提示: 理解各个算法的思想、原理结合上小节学习的 “实现互斥的四个逻辑部分”,重点理解各算法在进入区、退出区都做了什么分析各算法存在的缺陷(结合 “实现互斥要遵循的四个原则” 进行分析) 1、单标志法 算法思想:两个进…...

Java面试题-数据库
数据库相关 MySQL的索引使用 默认会有主键索引。 索引分类:单值索引、复合索引、唯一索引 详细文章 MySQL explain 分析 MySQL通过explain关键字分析SQL的执行计划。(Oracle通过EXPLAIN PLAN FOR sql) IDSELECT_TYPETABLEPARTITIONSTYPEPOSS…...
select 与 where、group by、order by、limit 子句执行优先级比较
当 select 和 其他三种语句的一者或者多者同时出现时,他们之间是存在执行先后顺序的。 他们的优先级顺序是:where > group by > select > order by > limit 目录 1、select 与 where 2、group by 与 where 、select 2、select 与 order…...
【Docker】用开源umami监控你的站点访问量
新年到,祝大家兔年吉祥!🎉 1.介绍 umami是一个开源的站点访问量监看程序,其支持docker部署到自己的服务器上。相比较百度等收费的网站信息监看,这种方式对于小站长来说更加实惠一些 2.docker安装的坑 2.1 docker-co…...
java环境配置
java环境配置步骤下载jdk安装jdk配置环境变量通过控制台命令验证配置是否成功大功告成安装教程: https://blog.csdn.net/m0_37220730/article/details/103585266 下载jdk 若不理解JDK/JRE/JVM的关系,可以点此查看初识Java(概念、版本迭代、…...

Linux系统服务:Apache安装及配置应用
目录 一、Apache安装 1、Apache简介 2、Yum安装 3、编译安装 4、服务管理 5、编译安装实现systemctl服务管理 二、Apache配置应用 1、基础应用 2、隐藏版本号 3、更改监听端口 一、Apache安装 1、Apache简介 Apache即阿帕奇是一款开源的、世界使用排名第一的Web服务…...
——背包问题)
动态规划(Dynamic Programming)——背包问题
动态规划(Dynamic Programming) 背包问题 目录动态规划(Dynamic Programming)背包问题01背包问题输入格式输出格式数据范围输入样例输出样例:二维一维完全背包问题多重背包问题输入格式输出格式数据范围输入样例输出样例:数据范围二进制优化分组背包问题…...

JVM学习02:内存结构
JVM学习02:内存结构 1. 程序计数器 1.1、定义 Program Counter Register 程序计数器(寄存器) 作用:是记住下一条jvm指令的执行地址 特点: 是线程私有的不会存在内存溢出 1.2、作用 程序计数器物理上是由寄存器来实…...
6年软件测试经验,从我自己的角度理解自动化测试
接触了不少同行,由于他们之前一直做手工测试,现在很迫切希望做自动化测试,其中不乏工作5年以上的人。 本人从事软件自动化测试已经近6年,从server端到web端,从API到mobile,切身体会到自动化带来的好处与痛楚…...

三种方式查看linux终端terminal是否可以访问外网ping,curl,wget
方法1:ping注意不要用ping www.google.com.hk来验证,因为有墙,墙阻止了你接受网址发回的响应数据。即使你那啥过,浏览器都可以访问Google,terminal里面也是无法得到响应 百度在墙内,所以可以正常拿到响应信…...
【Call for papers】SIGCOMM-2023(CCF-A/计算机网络/2023年2月15日截稿)
ACM SIGCOMM is the flagship annual conference of the ACM Special Interest Group on Data Communication (SIGCOMM). ACM SIGCOMM 2023, the 37th edition of the conference series, will be held in New York City, US, September 10 - 14, 2023. 文章目录1.会议信息2.时…...

Chapter5:机器人感知
ROS1{\rm ROS1}ROS1的基础及应用,基于古月的课,各位可以去看,基于hawkbot{\rm hawkbot}hawkbot机器人进行实际操作。 ROS{\rm ROS}ROS版本:ROS1{\rm ROS1}ROS1的Melodic{\rm Melodic}Melodic;实际机器人:Ha…...

[acwing周赛复盘] 第 90 场周赛20230211 补
[acwing周赛复盘] 第 90 场周赛20230211 补 一、本周周赛总结二、 4806. 首字母大写1. 题目描述2. 思路分析3. 代码实现三、4807. 找数字1. 题目描述2. 思路分析3. 代码实现四、4808. 构造字符串1. 题目描述2. 思路分析3. 代码实现六、参考链接一、本周周赛总结 T1 模拟T2 模拟…...

数组
一、数组中重复的数字题目描述:在一个长度为n的数组里的所有数字都在0到n-1的范围内。 数组中某些数字是重复的,但不知道有几个数字是重复的。也不知道每个数字重复几次。请找出数组中任意一个重复的数字。 例如,如果输入长度为7的数组{2,3,1…...
:AXI_UARTLITE的使用)
MicroBlaze系列教程(4):AXI_UARTLITE的使用
文章目录 @[toc]AXI_UARTLITE简介MicroBlaze添加串口IP常用函数使用示例参考资料工程下载本文是Xilinx MicroBlaze系列教程的第4篇文章。 AXI_UARTLITE简介 axi_uartlite是Xilinx提供axi-lite接口的通用串口IP核,用AXI-Lite总线接口和用户进行交互,速度可以根据不同的芯片调…...
GO 中的 init 函数
前言 go 语言中有一个非常神奇的函数 init ,它可以在所有程序执行开始前被执行,并且每个 package 下面可以存在多个 init 函数,我们一起来看看这个奇怪的 init 函数。 init 特性 init 函数在 main 函数之前执行,并且是自动执行;…...
使用C#编写k8s CRD Controller
本文项目地址:k8s-crd - Repos (azure.com)CRDCRD指的是Custom Resource Definition。开发者更多的关注k8s对于容器的编排与调度,这也是k8s最初惊艳开发者的地方。而k8s最具价值的地方是它提供了一套标准化、跨厂商的 API、结构和语义。k8s将它拥有的一切…...

Ansible---playbook剧本
目录 引言:什么是playbook? 一、Playbook 1.1、playbook中的核心元素 1.2、playbook中的基础组件 1.3、playbook格式说明 1.4、实例:httpd服务剧本 二、playbook中的模块 2.1、Templates 模块 2.2、tags 模块 2.3、Roles 模块 引言&…...
Delphi 中TImageCollection和TVirtualImageList 控件实现high-DPI
一、概述RAD Studio允许你通过使用TImageCollection组件和TVirtualImageList组件,在你的Windows VCL应用程序中包含缩放、高DPI、多分辨率的图像。这两个组件位于Windows 10面板中:注意:如果你使用FireMonkey进行跨平台应用,请看T…...
Ros中如何给UR5配置自定义工具 | 在Rviz中给UR5机器人装载定义工具 | UR5配置自定义末端执行器
前言 在学习和项目研究的过程中,我需要在Ur5e上装上工具,以对现实场景进行仿真。网上会有一些装载/配置现成的夹爪,例如Robotiq等。但和我们装载自定义工具的场景还有些差异,因此写一篇博客记录,可能有偏差。如果有问…...
)
航模老鸟的‘省钱’秘籍:一块BB响如何守护你的多块锂电池(附设置误区避坑)
航模电池管理的低成本智慧:BB响的进阶使用策略 在航模和无人机领域,电池管理一直是玩家们关注的焦点。对于拥有多块电池的资深爱好者或小型工作室来说,如何在保证安全的前提下优化成本,是一个值得深入探讨的话题。传统做法是为每块…...

从零实现带霍尔传感器的BLDC方波调速系统
1. 从零搭建BLDC调速系统的硬件准备 第一次接触带霍尔传感器的无刷直流电机时,我对着桌上散落的电机、驱动板和STM32开发板发呆了半小时。这种看似简单的三线电机,内部却藏着精密的磁场控制和时序逻辑。我们先来认识下核心部件:BLDC电机通常有…...

Docker Hub命令行工具hub-tool:镜像仓库自动化管理的终极利器
1. 项目概述:一个被低估的Docker Hub命令行利器 如果你日常工作中需要和Docker Hub打交道,无论是管理个人镜像、处理团队仓库,还是需要自动化镜像的推送、拉取和清理,那么你很可能已经受够了在浏览器和命令行之间反复横跳的繁琐。…...

别再只把PCA当降维工具了!用它处理三维点云,5分钟搞定地面和墙面分割
别再只把PCA当降维工具了!用它处理三维点云,5分钟搞定地面和墙面分割 当我们在处理三维点云数据时,常常会遇到需要将地面、墙面和其他物体点进行分割的场景。传统方法可能需要复杂的算法和大量的计算资源,但今天我要分享的是一个…...

AC鸭的温度墙
题目描述AC鸭在实验室里看到了一面很长的温度墙,这面墙从左到右一共有 n 个位置。一开始,每个位置的温度都是 0。接下来 AC鸭会进行 m 次加热操作。每次操作给出 l,r,v表示把第l个位置到第r个位置的温度都加上上v。所有操作结束后,AC鸭想知道…...

HEIF Utility:Windows平台HEIF格式兼容性完整解决方案实战
HEIF Utility:Windows平台HEIF格式兼容性完整解决方案实战 【免费下载链接】HEIF-Utility HEIF Utility - View/Convert Apple HEIF images on Windows. 项目地址: https://gitcode.com/gh_mirrors/he/HEIF-Utility 对于使用iPhone或iPad的Windows用户而言&a…...

必知必会:大模型位置编码RoPE与ALiBi位置编码详解
AI-Compass 致力于构建最全面、最实用、最前沿的AI技术学习和实践生态,通过六大核心模块的系统化组织,为不同层次的学习者和开发者提供从完整学习路径。 github地址:AI-Compass👈:https://github.com/tingaicompass/AI-Compass gitee地址:AI-Compass👈:https://gitee…...
)
告别OrthoFinder限制:用IQtree+Notung搞定跨物种基因家族树(附兰科NB-ARC实战)
突破OrthoFinder局限:基于IQtree与Notung的跨物种基因家族进化分析实战 当你在研究一个特定基因家族的进化历程时,OrthoFinder的默认聚类机制可能会成为一道难以逾越的障碍。想象一下这样的场景:你精心收集了四个兰科物种的NB-ARC结构域序列&…...

不止于校验:用HashMyFiles命令行玩转文件批量管理与VirusTotal联动
从本地到云端:HashMyFiles命令行与VirusTotal联动的安全自动化实践 在数字化时代,文件完整性校验和安全检测已成为IT运维、安全分析乃至日常开发中不可或缺的环节。传统图形界面工具虽然直观,但在处理大批量文件或需要自动化集成的场景下显得…...

大模型入门必看:收藏这份工业大模型学习指南,小白也能轻松入门
本文介绍了工业大模型的概念、体系架构和构建方法,分析了工业大模型在制造业中的应用潜力。文章指出,工业大模型并非通用大模型在工业领域的简单应用,而是一套全新的理论与技术体系。工业大模型通过融合工业数据和机理知识,具备智…...