yolov5-7.0模型DNN加载函数及参数详解(重要)
yolov5-7.0模型DNN加载函数及参数详解(重要)
- 引言
- yolov5(v7.0)
- 1,yolov5.h(加载对应模型里面的相关参数要更改)
- 2,main主程序
- (1)加载网络
- (2)检测推理(forward)
- (2.1)制作黑背景正方形,用于blobFromImage的无损缩放
- (2.2)blobFromImage改变图像格式为网络出入格式
- (2.3)输入setInput图像并forward推理
- (2.4)结果解析
- (2.4.0)方法0直接Mat读取解析(主要用于理解输出结构)
- (2.4.1)方法1指针法Mat.data解析(快但不易理解)
- (2.5)绘制结果
引言
使用opencv的dnn模块对应yolov5(v7.0)的导出的onnx模型进行推理解析,明确各个参数的对应含义及结果。理论上,有了onnx模型,有了该网络模型的输入输出各个参数含义,就可以使用任意的可以读取onnx模型的部署框架进行部署推理。
yolov5(v7.0)
Yolov5(v7.0)
部署:使用opencv4.5.5(opencv4.5.4以上可以读取网络),dnn模块部署
已经导出的cpu、opset=12、640大小图像、默认静态

如上,输入输出层在后面的DNN模块推理会用到
1,yolov5.h(加载对应模型里面的相关参数要更改)
需要修改的相关参数如下:要根据自己的模型来进行


#include <fstream>
#include <sstream>
#include <iostream>
#include <opencv2/dnn.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
using namespace cv;
using namespace dnn;
using namespace std;class YOLO
{
public:struct Detection{int class_id;float confidence;Rect box;};
public:YOLO();~YOLO();bool loadNet(string model_path, bool is_cuda);Mat formatYolov5(const Mat& source);void detect(Mat& image, vector<Detection>& output);void drawRect(Mat& image, vector<Detection>& output);
private:Net m_net;//修改为训练时自己模型Img大小float inputWidth = 640;float inputHeight = 640;//修改 dimensions = 类别数 + 5const int dimensions = 6;//修改 通过Netron可查看,图片大小320,rows为6300,图片大小640,rows为25200const int rows = 25200;float scoreThreshold = 0.2;float nmsThreshold = 0.4;float confThreshold = 0.4;
public://修改为自己的类别数const vector<string> m_classNames = { "qrcode" };/*const std::vector<std::string> m_classNames = { "person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light","fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow","elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee","skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard","tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple","sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch","potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone","microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear","hair drier", "toothbrush" };*/const vector<Scalar> colors = { Scalar(255, 255, 0), Scalar(0, 255, 0), Scalar(0, 255, 255), Scalar(255, 0, 0) };
};
2,main主程序
int main(int argc, char** argv)
{Mat frame = imread("2.jpeg");YOLO yolov5;//加载模型yolov5.loadNet("qrcode.onnx", false);std::vector<YOLO::Detection> output;//进行检测//检测时间DWORD time_start, time_end;/* 获取开始时间 */time_start = GetTickCount(); //从操作系统启动经过的毫秒数yolov5.detect(frame, output);time_end = GetTickCount();int time = (time_end - time_start);cout << "Time = " << (time_end - time_start) << "ms\n ";//将所耗时间显示到图片上putText(frame, format("time:%dms", time), Point(20, 50), FONT_HERSHEY_SIMPLEX, 1.2, Scalar(255, 0,0), 2);//绘制结果yolov5.drawRect(frame, output);imshow("output", frame);waitKey(0);return 0;
}
(1)加载网络
加载已经导出的onnx网络,打印各个层级参数,此时网络读取成功(opencv要在4.5.4以上)
bool YOLO::loadNet(string model_path, bool is_cuda)
{try {m_net = readNet(model_path);//获取各层信息vector<string> layer_names = m_net.getLayerNames(); //此时我们就可以获取所有层的名称了,有了这些可以将其ID取出for (int i = 0; i < layer_names.size(); i++) {int id = m_net.getLayerId(layer_names[i]); //通过name获取其idauto layer = m_net.getLayer(id); //通过id获取layerprintf("layer id:%d,type:%s,name:%s\n", id, layer->type.c_str(), layer->name.c_str()); //将每一层的id,类型,姓名打印出来(可以明白此网络有哪些结构信息了)}}catch (const std::exception&) {cout << "load faild" << endl;return false;}if (is_cuda){cout << "Attempty to use CUDA\n";m_net.setPreferableBackend(DNN_BACKEND_CUDA);m_net.setPreferableTarget(DNN_TARGET_CUDA_FP16);}else{cout << "Running on CPU\n";m_net.setPreferableBackend(DNN_BACKEND_OPENCV);m_net.setPreferableTarget(DNN_TARGET_CPU);}return true;
}

(2)检测推理(forward)
推理前要对图像进行预处理,使其变为网络的输入格式
(2.1)制作黑背景正方形,用于blobFromImage的无损缩放
也可以不制作黑背景,但后面blobFromImage缩放计算可能结果有损失
//制作黑背景正方形,用于blobFromImage的无损缩放
//对于长宽比过大的图片,由于opencv的blobFromImage()函数在缩放的时候不是无损缩放,
//会导致图像变形严重导致结果错误或者漏检。虽然blobFromImage里面有个参数可以保持比例缩放,
//但是只会保留中间的部分,两边信息全部丢掉,所以如果你的目标全部在中间就可以无所谓,
//如果不是,那么需要简单的自己做个无损缩放,制作一张全黑的3通道正方形图片,边长为原图的长边,
//最后将原图放在(0,0)的位置上面,这样就可以直接输入blobFromImage里面就可以实现无损缩放了,
//而且不用对检测结果进行二次修正位置了。
//https ://blog.csdn.net/qq_34124780/article/details/116464727
Mat YOLO::formatYolov5(const Mat& source)
{int col = source.cols;int row = source.rows;int _max = MAX(col, row);Mat result = Mat::zeros(_max, _max, CV_8UC3);source.copyTo(result(Rect(0, 0, col, row)));return result;
}
(2.2)blobFromImage改变图像格式为网络出入格式
Mat blob;auto input_image = formatYolov5(image);blobFromImage(input_image, blob, 1. / 255., Size(inputWidth, inputHeight), Scalar(), true, false);//1. / 255.数据归一化,图像大小变为输入格式(640*640)true进行通道交换,false不进行切片
此时经过blobFromImage的图像就变成4维了,在imagewatch中不显示


(2.3)输入setInput图像并forward推理
m_net.setInput(blob);
vector<Mat> outputs;
m_net.forward(outputs, m_net.getUnconnectedOutLayersNames());
Forward函数有很多,可以得到如下,有的是将所有的输出结果得到(有时输出层有多个),有的是将对应层的输出结果得到,这里直接得到所有最终输出结果就行了



实际这里推理只有1个输出结果
cout << "outputs.size():" << outputs.size() << endl;

(2.4)结果解析
实际此时推理输出为[1252006]共三维的图像,使用指针的方法的话二维还是三维都会展开成一维指针进行读取

输出结果如下dims=3维度

将其转换成Mat可以显示的方式,用于查看对应的效果

效果如下

(2.4.0)方法0直接Mat读取解析(主要用于理解输出结构)

与指针相比,通过mat数组获取对应的第4列的数据是对应的起来的,如下应该使用32F数据格式即可(要将其结果转为(25200*6格式的数据保存到mat中))

上图最右侧的第6列的数据是类的分数(虽然显示1,但实际上分值是浮点数接近1的)

三维的

//使用Mat进行相关数据的保存解析(这里主要通过mat用于理解对应的输出结构)
void YOLO::detect2(Mat& image, vector<Detection>& output) {Mat blob;auto input_image = formatYolov5(image);blobFromImage(input_image, blob, 1. / 255., Size(inputWidth, inputHeight), Scalar(), true, false);//1. / 255.数据归一化,图像大小变为输入格式(640*640)true进行通道交换,false不进行切片m_net.setInput(blob);vector<Mat> outputs;m_net.forward(outputs, m_net.getUnconnectedOutLayersNames());//结果解析//方法0、使用Mat进行解析//***********输出测试//几个输出结果cout << "outputs.size():" << outputs.size() << endl;/*Mat detect_res = m_net.forward("output0");cout << "detect_res.channels():" << detect_res.size() << endl;cout << "outputs[0].channels():" << outputs[0].size() << endl;*///对其结果使用下方的重新复制一个MAT,这样的才能在imagewatch中看到,否则无法显示Mat d1 = outputs[0].clone();//重新定义一个Mat对象接收(将其转换成输出结构)(rows = 25200, dimensions=6)Mat detectionMat2(rows, dimensions, CV_32F, d1.ptr<float>()); //此处是初始化一个行为size[2],深度为浮点型,数据从detection中获取 //使用imagewatch可以看到6*25200的数组,单通道32F深度cout << "detect_res.rows:" << detectionMat2.rows << endl;//先得到原始用于blobFromImage归一化的input_image图像与/640的比例,后面用于目标框的结果返回float x_factor1 = float(input_image.cols) / inputWidth; //用于blobFromImage归一化的input_image图像/640,得到对应的比例float y_factor1 = float(input_image.rows) / inputHeight; //用于blobFromImage归一化的input_image图像/640vector<int> class_ids1;vector<float> confidences1;vector<Rect> boxes1;//25200行的数据(对应的onnx的输出参数)for (int i = 0; i < detectionMat2.rows; i++) {float confidence1 = detectionMat2.at<float>(i, 4); //置信度方框box的得分分值//cout << "confidence1:" << confidence1 << endl;if (confidence1 >= confThreshold) //求置信度>某个值{//cout << "confidence1:" << confidence1 << endl;//求类别得分将第一个类别后面的所有的类别作为一个mat一行//制作一个vector对象,//循环从类别后面截取各个类的分值,并保存vector<float> classes_scores1;for (int j = 5; j < detectionMat2.cols; j++) {classes_scores1.push_back(detectionMat2.at<float>(i, j));}//求classes_scores1的最大值及对应的索引auto max_class_score = max_element(classes_scores1.begin(), classes_scores1.end());int idMax = max_class_score - classes_scores1.begin();//cout << "类别的分数值:" << *max_class_score << "id:" << idMax << endl;if (*max_class_score > scoreThreshold){confidences1.push_back(confidence1);class_ids1.push_back(idMax);//前4行对应的(物体的x、y、w、h)(这里的x、y、w、h结果只是图像640*640的结果的,要返回)float x = detectionMat2.at<float>(i, 0);float y = detectionMat2.at<float>(i, 1);float w = detectionMat2.at<float>(i, 2);float h = detectionMat2.at<float>(i, 3);//将x、y、w、h结果返回(由640*640的结果返回到原图size()大小的结果)int left = int((x - 0.5 * w) * x_factor1);//(x_factor1*x)int top = int((y - 0.5 * h) * y_factor1);int width = int(w * x_factor1); //宽高直接*对应比列即可int height = int(h * y_factor1);boxes1.push_back(Rect(left, top, width, height)); //得到最终原图对应的矩形框大小}}}cout << "boxes.size():" << boxes1.size() << endl;//NMS结果非极大值抑制(有些结果是重合的,此处通过nms去除)vector<int> nms_result; //保存对应的索引值NMSBoxes(boxes1, confidences1, scoreThreshold, nmsThreshold, nms_result);for (int i = 0; i < nms_result.size(); i++){int idx = nms_result[i];Detection result;result.class_id = class_ids1[idx];result.confidence = confidences1[idx];result.box = boxes1[idx];output.push_back(result);}
}
(2.4.1)方法1指针法Mat.data解析(快但不易理解)
//使用指针进行相关的结果解析(更快速,但不易理解)(相关取值计算过程和上方一样,可以看detect2进行理解)
void YOLO::detect(Mat& image, vector<Detection>& output)
{Mat blob;auto input_image = formatYolov5(image);blobFromImage(input_image, blob, 1. / 255., Size(inputWidth, inputHeight), Scalar(), true, false);//1. / 255.数据归一化,图像大小变为输入格式(640*640)true进行通道交换,false不进行切片m_net.setInput(blob);vector<Mat> outputs;m_net.forward(outputs, m_net.getUnconnectedOutLayersNames());//方法1、使用指针进行解析(1*25200*6)float x_factor = float(input_image.cols) / inputWidth; //用于blobFromImage归一化的input_image图像/640,得到对应的比例float y_factor = float(input_image.rows) / inputHeight; //用于blobFromImage归一化的input_image图像/640float* data = (float*)outputs[0].data; //获取输出结果的初始指针vector<int> class_ids;vector<float> confidences;vector<Rect> boxes;for (int i = 0; i < rows; ++i){float confidence = data[4]; //置信度方框box的分值if (confidence >= confThreshold) //求置信度{float* classes_scores = data + 5; //求类别得分//求类别得分将第一个类别后面的所有的类别作为一个mat一行(x、y、w、h、confidence、class1、class2、、、)//一行,m_classNames.size()个长度Mat scores(1, m_classNames.size(), CV_32FC1, classes_scores);//求当前最大分数的类别及其索引Point class_id;double max_class_score;minMaxLoc(scores, 0, &max_class_score, 0, &class_id);if (max_class_score > scoreThreshold){confidences.push_back(confidence);class_ids.push_back(class_id.x);//boxfloat x = data[0];float y = data[1];float w = data[2];float h = data[3];int left = int((x - 0.5 * w) * x_factor);int top = int((y - 0.5 * h) * y_factor);int width = int(w * x_factor);int height = int(h * y_factor);boxes.push_back(Rect(left, top, width, height));}}data += dimensions; //data隔着对应结果(类别数1+5(x、y、w、h))}//NMS结果非极大值抑制vector<int> nms_result;NMSBoxes(boxes, confidences, scoreThreshold, nmsThreshold, nms_result);for (int i = 0; i < nms_result.size(); i++){int idx = nms_result[i];Detection result;result.class_id = class_ids[idx];result.confidence = confidences[idx];result.box = boxes[idx];output.push_back(result);}
}
(2.5)绘制结果
就是将矩形框、分值等数据绘制到对应的图像上
void YOLO::drawRect(Mat& image, vector<Detection>& output)
{int detections = output.size();for (int i = 0; i < detections; ++i){auto detection = output[i];auto box = detection.box;auto classId = detection.class_id;const auto color = colors[classId % colors.size()];rectangle(image, box, color, 3);rectangle(image, Point(box.x, box.y - 40), Point(box.x + box.width, box.y), color, FILLED);string label = m_classNames[classId] + ":" + to_string(output[i].confidence);putText(image, label, Point(box.x, box.y - 5), FONT_HERSHEY_SIMPLEX, 1.5, Scalar(0, 0, 0), 2);}}
下面是Yolov5s.onnx对应模型的结果

相关文章:
yolov5-7.0模型DNN加载函数及参数详解(重要)
yolov5-7.0模型DNN加载函数及参数详解(重要) 引言yolov5(v7.0)1,yolov5.h(加载对应模型里面的相关参数要更改)2,main主程序(1)加载网络(2)检测推理࿰…...
)
StringEntity 用于将字符串内容作为 HTTP 请求实体(请求体)
StringEntity 类是 Apache HttpClient 库中的一个类,它用于将字符串内容作为 HTTP 请求实体(请求体)。这个类非常适合用于发送 JSON、XML 或其他需要以字符串形式发送的数据。以下是 StringEntity 类的一些常用方法和代码案例: …...

校园系统校园小程序 论坛校园圈系统失物招领、闲置二手、跑腿外卖等校园圈子系统应该具备有哪些功能
针对校园系统、校园小程序、论坛校园圈系统以及失物招领、闲置二手、跑腿外卖等具体功能,一个综合性的校园圈子系统应该具备以下主要功能: 前后端源码查看 一、基础功能 用户注册与登录 提供用户注册和登录功能,支持学生身份验证、手机号验…...

[AWS云]kafka调用和创建
背景:因为因为公司的项目需要使用AWS的kafka,但是在创建和使用过程中都遇到了一些报错和麻烦,毕竟老外的东西,和阿里云、华为使用起来还是不一样。 一、创建(创建的配置过程就略了,就是配置一下可用区、型号࿰…...

查看 Excel 应用程序中已打开的 Excel 文件的完整路径
要查看 Excel 应用程序中已打开的 Excel 文件的完整路径(全路径),你可以通过以下几种方法获取具体路径,尤其是在 VSTO 应用程序中。 方法1:使用 VSTO Excel 外接程序代码 在 VSTO 外接程序代码中,您可以直接…...

学习 RocketMQ 单机部署、消息发送、消息接收
文章目录 RocketMQ 介绍为什么要使用 MQ ?RocketMQ 与其他产品对比vs Kafkavs RabbitMQvs ActiveMQ RocketMQ 重要概念部署 Namesrver、Broker、Dashboard快速入门消息生产者消息消费者 消费模式简单消息1)同步发送2)异步发送3)单…...

【计算机网络】CDN
CDN(Content Delivery Network,内容分发网络)是一种分布式的服务器网络,旨在通过将内容缓存到多个地理位置的服务器上,加速内容的分发和传递。CDN 的主要目的是减少用户访问网站时的延迟,提升用户体验&…...

数据结构:插入排序
1.插入排序 此排序如打扑克牌一样;每次抓牌,把扑克从前向后扒拉;找到合适的位置插入进去—所以叫插入排序; 时间复杂度:O(N^2) int arr[10] { 9,8,7,6,5,4,3,2,1,0 };//数据太多就不好写了 …...

Nginx反向代理配置与负载均衡配置
简介:整理自黑马程序员苍穹外卖的第11节 nginx是什么? nginx的好处 nginx反向代理配置方式 nginx负载均衡的配置方式 nginx负责均衡策略...

axios 前端与 Django 后端的 POST 交互
背景 自己在写一些油猴脚本,前端需要用 JS,后端是自己的服务,是用 Python 的 Django 框架完成的。 油猴脚本中需要通过 POST 方法,向后端传一些数据,所以前端我用的是 axios 库,后端需要用 Django 处理 P…...

数据结构常用术语
一. 常见术语 数据相关 英文术语中文术语Data数据Data element数据元素Data item数据项Data structure数据结构Logical structure逻辑结构Data type数据类型 指针与存储 英文术语中文术语Pointer指针Sequential storage structure顺序存储结构Linked storage structure链状…...

Flask 轻松上手:从零开始搭建属于你的Web应用
引言 随着互联网技术的发展,Web应用程序的需求日益增长。对于开发者来说,选择一个合适的框架至关重要。Flask以其简洁的设计、高度的可定制性和对各种扩展的良好支持,成为了很多项目的基础。无论你是初学者还是有经验的开发者,掌…...

[MyBatis-Plus]快速入门
介绍 MyBatis-Plus是MyBatis的好朋友, 与MyBatis配合, 实现开发效率的提高 官网: 特点: 润物细无声: 只做增强不做改变, 引入它不会对现有工程产生影响, 如丝般顺滑效率自上: 只需简单配置, 即可快速进行单表CRUD, 从而节省大量时间功能丰富: 代码生产, 自动分页, 逻辑删除, …...

单例模式和读者写者问题
文章目录 10. 线程安全的单例模式10.1 什么是设计模式10.2 什么是单例模式10.3 单例模式的特点10.4 饿汉方式和懒汉方式10.5 单例模式的线程池 11. STL和智能指针的线程安全 问题11.1 STL中的容器是否是线程安全的?11.2 智能指针是否是线程安全的? 12. 其他常见的各种锁13. 读…...

内网wordpress更换IP后无法访问的解决办法
一、现象 一台装有wordpress的台式机,从一个校区移到了另一个校区,更换了IP地址,导致无法正常访问。 二、分析 安装wordpress的时候里面的ip(或域名)都已固定。安装好后,内网通过IP访问&am…...

Spring Boot课程答疑:技术难题一网打尽
4系统概要设计 4.1概述 本系统采用B/S结构(Browser/Server,浏览器/服务器结构)和基于Web服务两种模式,是一个适用于Internet环境下的模型结构。只要用户能连上Internet,便可以在任何时间、任何地点使用。系统工作原理图如图4-1所示: 图4-1系统工作原理…...
云卷云舒【超级数据库】:算力网络时代的云原生数据库
一直关注算力网络,再次分析下移动云的数据库团队,他们在做的一些事情其实比较务实,在推进数据库依托云原生演进到算力网络阶段,这都是在构建一个能够承载无限容量、无感接入、多模融合、智能调度的超级数据库。 未来数据库&#…...
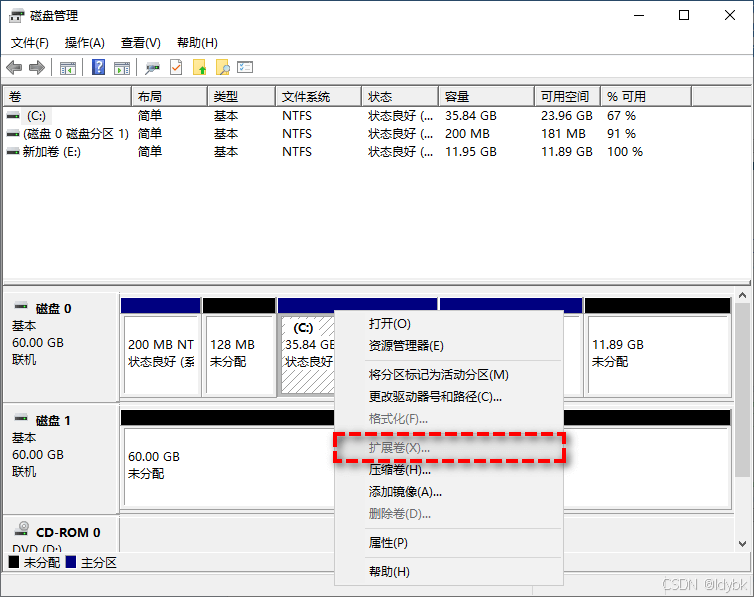
电脑分盘分盘
方案一:使用磁盘管理工具扩展卷功能将未分配磁盘合并到C盘 按WinR输入diskmgmt.msc并按Enter键打开磁盘管理工具。在主界面中右键单击C盘驱动器并选择“扩展卷”,然后按照提示流程操作即可扩展C盘空间。 WinR diskmgmt.msc 注意:虽然系统内置…...

四元数基础知识
背景 四元数是方向的 4 元组表示形式,它比旋转矩阵更简洁。 四元数对于分析涉及三维旋转的情况非常有效。 四元数广泛用于机器人技术、量子力学、计算机视觉和 3D 动画。 您可以在 Wikipedia 上了解有关基本数学概念的更多信息。 您还可以观看由 3blue1brown 制…...

『网络游戏』进入游戏主城UI跳转主城【26】
首先在Unity客户端中创建一个空节点重命名为MainCityWnd 设置父物体为全局 创建空节点钉在左上角作为角色信息UI 在钉子下创建Image 创建脚本:MainCityWnd.cs 编写脚本:MainCityWnd.cs 挂载脚本 创建脚本:MainCitySys.cs 编写脚本:…...

Grok 4.3与未来展望——智能体时代的Grok与AI安全新范式
目录1 Grok 4.3 Beta:最新版本的技术跃迁1.1 2026年4月:Grok 4.3的发布1.2 Computer Use:AI操作计算机的新范式2 reasoning_effort参数的深度解析2.1 推理资源的动态分配2.2 推理深度与质量的实证关系3 Grok的AI安全框架3.1 "最大真实性…...

长期项目使用Taotoken Token Plan套餐的成本控制实际体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期项目使用Taotoken Token Plan套餐的成本控制实际体验 1. 项目背景与成本挑战 在为期数月的AI应用开发项目中,我们…...

WindowResizer:打破Windows窗口尺寸限制的终极方案
WindowResizer:打破Windows窗口尺寸限制的终极方案 【免费下载链接】WindowResizer 一个可以强制调整应用程序窗口大小的工具 项目地址: https://gitcode.com/gh_mirrors/wi/WindowResizer 在Windows日常使用中,你是否曾对某些应用程序的窗口尺寸…...

Helix QAC 2023.1更新:编码标准覆盖率如何提升C/C++项目合规性
1. 项目概述:一次聚焦于“合规性”的精准升级最近在梳理团队今年的代码质量工具链时,Helix QAC 2023.1的更新通知引起了我的注意。作为一名常年与C/C代码质量、功能安全标准(如MISRA、AUTOSAR C14)打交道的开发者,我对…...

GitHub网络加速终极指南:如何实现10倍下载速度的智能优化方案
GitHub网络加速终极指南:如何实现10倍下载速度的智能优化方案 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 你是否曾…...
PyTorch模型调优第一步:用TorchSummary分析参数量与计算开销(以CNN/Transformer为例)
PyTorch模型调优第一步:用TorchSummary分析参数量与计算开销(以CNN/Transformer为例) 在深度学习项目从实验阶段走向生产部署的过程中,模型效率往往成为决定成败的关键因素。当我们完成模型架构设计后,第一个需要回答的…...

共享麻将室无人化运营:技术架构、硬件选型与实战避坑指南
1. 项目概述:当传统棋牌室遇上“无人化”浪潮最近几年,如果你留意过城市里的商业形态,会发现一个挺有意思的现象:那些曾经需要前台、服务员、保洁阿姨的传统棋牌室,特别是麻将馆,正在悄然“变身”。它们门口…...

观察Taotoken用量看板如何清晰展示各项目与模型的Token消耗明细
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察Taotoken用量看板如何清晰展示各项目与模型的Token消耗明细 对于依赖大模型API进行开发的团队而言,成本透明与资源…...
从屏幕取词到智能翻译:CuteTranslation如何重塑Linux用户的跨语言工作流
从屏幕取词到智能翻译:CuteTranslation如何重塑Linux用户的跨语言工作流 【免费下载链接】CuteTranslation Linux屏幕取词翻译软件 项目地址: https://gitcode.com/gh_mirrors/cu/CuteTranslation 在Linux生态系统中,多语言处理一直是个技术痛点—…...

word删除空白页
行距固定值,1磅...