机器视觉系统硬件组成之工业相机篇
工业相机是一种非常重要的机器视觉器件,它能够将被采集的图像信息通过电路转换成电信号,再通过模数转换器(ADC)将其转化为数字信号,最后以标准的视频信号输出。工业相机在机器视觉领域得到了广泛应用,包括质量控制、工业检测、医疗诊断、安全监控以及交通管理等诸多领域。

目录
机器视觉是通过光学装置和非接触传感器自动地接收和处理一个真实物体的图像,以获得所需信息或用于控制机器人运动的装置。简单来说,机器视觉是用机器代替人眼来做测量和判断,它依赖于一系列设备和技术,其中工业相机是核心组件之一。
一、定义及原理
工业相机,也被称为摄像机,是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。机器视觉系统通过图像摄取装置(即工业相机)将被摄目标转化为图像信号,这些信号被传送到专用的图像处理系统。系统根据像素分布、亮度、颜色等信息,将这些信号转化为数字化信号,并进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
二、分类
1. 按照芯片结构分类:CCD相机 & CMOS相机。
2. 按照传感器结构分:面阵相机 & 线阵相机。
3. 按照输出模式分类:模拟相机 & 数字相机。
4. 按照输出色彩分:彩色相机&黑白相机。
工业相机主要基于CCD(电荷耦合器件)或CMOS(互补金属氧化物半导体)芯片。CCD是目前机器视觉中最常用的图像传感器,它集光电转换、电荷存贮、电荷转移和信号读取于一体,是典型的固体成像器件。CMOS图像传感器则将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上。两者在性能和应用方面各有优势:
- CMOS相机适用于高速和低功耗应用,成本较低。
- CCD相机适用于要求高图像质量和低噪音的应用,成本较高。
面阵相机是每次采集若干行的图像并以帧方式输出。其应用面较广,如面积、形状、尺寸、位置,甚至温度等的测量。面阵相机的优点是可以获取二维图像信息,测量图像直观。缺点是像元总数多,而每行的像元数一般较线阵少,帧速度受到限制。
线阵工业相机,顾名思义是成像传感器呈“线”状的。虽然也是二维图像,但极宽,几千个像素的宽度,而高度却只有几个像素的而已。线阵工业相机具有高扫描频率和高分辨率。其典型应用领域是检测连续的材料,例如金属、塑料、纸和纤维等。被检测的物体通常匀速运动, 利用一台或多台工业相机对其逐行连续扫描,以达到对其整个表面均匀检测。可以对图像逐行进行处理,或者对由多行组成的面阵图像进行处理。另外线阵工业相机非常适合测量场合,这要归功于传感器的高分辨率。一般在两种情况下使用这种相机:
1. 被测视野为细长的带状,多用于滚筒上检测的问题。
2. 需要极大的视野或极高的精度。
数字工业相机和模拟工业相机只在输出信号上有区别。
模拟工业相机输出的是模拟信号,数字工业相机输出的是数字信号。模拟工业相机的A/D 转换是在工业相机之外进行的,数字工业相机的A/D 转换是在工业相机内部完成的。
标准的模拟相机分辨率很低,帧率固定。模拟相机必须搭配具有A/D转换功能的模拟采集卡,经过模拟采集卡转换为数字信号进行存储或者处理。模拟信号可能会由于工厂内其他设备(比如电动机或高压电缆)的电磁干扰而造成失真,随着噪声水平的提高模拟相机的动态范围(原始信号与噪声之比)会降低。动态范围决定了有多少信息能从相机传输给计算机。数字相机输出的是数字信号,数字信号不受电噪声影响,因此数字相机的动态范围更高,能够向计算机传输更精确的信号。
黑白工业相机直接将光强信号转换成图像灰度值,生成的是单色灰度图像。彩色工业相机能获取景物中红、绿、蓝三个分量的光信号,输出彩色图像。彩色相机能够提供比黑白相机更多的色彩信息。
三、常用参数
-
分辨率:指相机能够捕捉图像的像素数量,它影响着图像的细节程度和测量精度。通常面阵相机的分辨率用水平和垂直分辨率两个数字表示,如:1920(H)x 1080(V),前面的数字表示每行的像元数量,即共有1920个像元;后面的数字表示像元的行数,即1080 行。线阵相机的分辨率通常表示多少K,如1K(1024),2K(2048),4K(4096)等。选择时需要根据测量对象的特征和测量精度要求来计算所需的像素数量。
-
帧率:表示相机每秒捕获的图像数量(FPS),即相机采集和传输图像的速度。通常面阵相机用帧频表示,单位fps(Frame Per Second)。如30fps,表示相机1秒钟内最多能采集30帧图像。线阵相机通常用行频表示,单位KHz,如12KHz,表示相机1秒钟内最多能采集12000行图像数据。高帧率相机适用于快速运动物体的捕捉和分析。
-
像素深度:数字相机输出的数字信号,即像元灰度值,具有特殊的比特位数,称为像元深度。对于黑白相机,这个值通常是8-16bit。像元深度定义了灰度由暗道亮的灰阶数。例如,对于8bit的相机0 代表全暗而255 代表全亮。决定了图像的色彩范围和灰度级别。高像素深度相机能提供更丰富的色彩和更精细的灰度变化。
-
像元尺寸:像元的尺寸是每个像素的面积,也就是像元大小。像元尺寸大小和像元数(分辨率)共同决定了相机靶面的大小。
-
精度:检测的精准度,每个像素代表的实际物理尺寸。精度=单方向市场大小/相机单方向分辨率。
-
噪声:感光器件(CMOS/CCD)接收光线信号并输出的过程中所产生的图像中的粗糙部分。工业相机的噪声是指成像过程中不希望被采集到的、实际成像目标外的信号。
-
信噪比:输出信号中有用信号和噪声的比(dB)。
-
数据接口:在机器视觉检测技术中,当前工业相机的数据接口主要有GigE、USB3.0、CoaXPress、Cameralink、HSLink、10GigE,还有退居二线的IEEE 1394、USB2.0、LVDS、RS422、SDI等。
1)GigE:带宽可达到1000 Mbps,不需中继器最远可传输100米。
2)Cameralink:支持速率达2.3Gb/s。
3)USB3.0:最大信号传输速率可达5 Gbits/s。实际传输速率可达到 +350MB/s。
4)CoaXPress:一种非对称的高速串行通信数字标准,一根电缆最高传输率可达 6.25Gb/s,传输距离可达100米。
5)HSLink:最大带宽可达6000MB/s,支持即插即用。
6)10GigE:俗称万兆网,带宽可达到10000 Mbps,最远可传输100米。
-
动态范围:动态范围表明相机探测光信号的范围。对于固定相机,其动态范围是一个定值,不随外界条件变化而变化。在线性响应曲线上,相机的动态范围定义为饱和曝光量与噪声等效曝光量的比值,即动态范围=光敏元的满阱容量/等效噪声信号动态范围,可用倍数、dB 或Bit 等方式来表示。动态范围大,相机对不同的光照强度有更强的适应能力。
-
光谱响应性:工业相机的光谱响应特性是指该感光芯片对不同光波的敏感特性,一般响应范围是350nm-1000nm,一些相机在感光芯片前加了一个滤镜,滤除红外光线,如果系统需要对红外感光时可去掉该滤镜。
-
快门方式:工业相机有全局快门和卷帘快门。
-
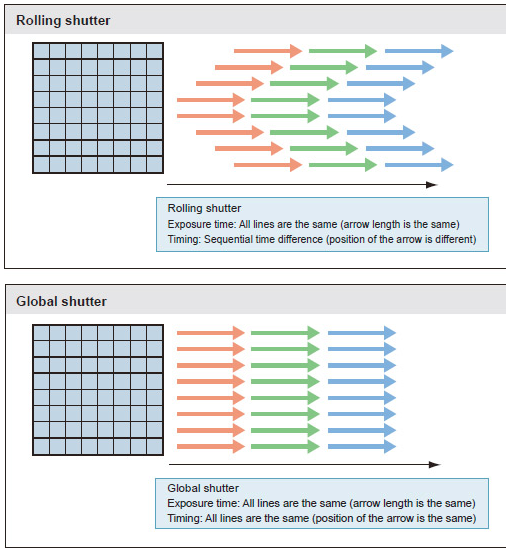
全局快门与卷帘快门的优缺点:
①全局快门的优点是所有的像素点同时曝光,其缺点是曝光时间存在物理极限;
②卷帘快门的优点是具有更小的曝光时间,其缺点是由于是逐行而不是同时曝光取像,如果图像是运动的,则存在明显的拖影,因此不适合拍摄运动的物体。
曝光时间短的应用(如<500μs)适合使用全局快门,而曝光时间长的应用,选择卷帘快门可以有更低的噪声和帧速。在实际应用中,一般只要是拍摄运动物体,都使用全局快门,只有在拍摄静止物体时,才使用滚动快门。CCD和CMOS相机都可配备全局快门。
四、选型要点
工业相机选型时要注意以下几点:
1. 分辨率的选择。首先根据目标物体的精度要求选择分辨率。其次看工业相机的输出,若是用机器软件分析识别,分辨率越高越有帮助;若是需要视频输出至显示器上观察,则依赖于显示器的分辨率,工业相机的分辨率再高,显示器分辨率不够,也是没有意义的;若是需要将图像实时保存下来,还需要综合服务器的存储速率来考虑工业相机的分辨率。
2. 与镜头的匹配。传感器芯片尺寸需要小于或等于镜头的靶面尺寸,C 或CS 安装座也要匹配(或者增加转接口);
3. 相机帧数选择。当被测物体处于运动状态时,要选择帧数高的工业相机。但一般来说分辨率越高,帧数越低。
系统单次运行速度 = 系统成像(包括传输)速度 + 系统检测速度
虽然系统成像(包括传输)速度可以根据工业相机异步触发功能、快门速度等进行理论计算,最好的方法还是通过软件进行实际测试。
如何选择线阵相机?
1. 计算分辨率:幅宽除以检测精度得出每行需要的像素。
2. 检测精度:幅宽除以像素得出实际检测精度。
3. 扫描行数:每秒运动速度长度除以精度得出每秒扫描行数。
根据以上计算结果选择线阵相机举例如下:
如幅宽为1600mm、精度1mm、运动速度22000mm/s
1600/1=1600 像素 最少2000像素,选定为2k 相机
1600/2048=0.8 实际精度
22000mm/0.8mm=27.5KHz
应选定相机为2048 像素28kHz 相机。
选择工业相机时,物体成像的速度必须考虑好。对于静止或移动缓慢的物体,面阵工业相机最适合。在面阵相机曝光时任何的移动会导致图像模糊,此时可通过减小曝光时间或使用闪光灯来解决图像模糊的问题。对于快速移动的物体,保证相机曝光时目标物体的位移小于一个像素所代表的的拍摄精度,即可解决图像模糊的问题。例如,目标物以1cm/s的速度匀速移动,拍摄精度为1mm/pixel,那么可以设置的相机最大曝光时间是0.1秒。
五、工业相机保存方法
1. 尽量避免将工业相机直接指向阳光,以免损害摄像头的图像感应器件;
2. 避免将工业相机和油、蒸汽、水汽、湿气和灰尘等物质接触,避免和水直接接触;
3. 不要使用刺激的清洁剂或者有机溶剂擦拭工业相机;
4. 不要拉扯和扭转连接线;
5. 非必要情况下,自己不要随意拆卸相机,试图碰触其内部零件,这容易对相机造成损伤,人为损伤经销商是不保修的;
6. 存储时,应当将相机存放到干净、干燥的地方。
六、配套软件
不同品牌的工业相机匹配的软件不一样, 机器视觉产品资料查询平台收录众多工业相机、工业镜头等视觉器件。可以直接在该平台输入相机型号,即可查看相关型号资料及软件。
七、应用领域
工业相机广泛用于各种应用领域,包括自动化生产线上的质量控制、机器视觉系统、医疗成像、物流和仓储、安全监控、交通监控、军事和航空等。它们在这些领域中用于实时监测、数据收集、图像处理和自动决策,有助于提高生产效率、降低成本和提高质量。
八、发展趋势
-
技术创新:随着人工智能和深度学习技术的发展,工业相机将具备更强大的图像处理和分析能力,实现更高级别的自动化和智能化。
-
集成化与模块化:未来的工业相机将更加集成化和模块化,方便用户根据实际需求进行灵活配置和扩展。
-
高性价比:随着技术的不断进步和市场竞争的加剧,工业相机的性价比将不断提高,为更多行业和应用领域提供优质的视觉解决方案。
综上所述,工业相机作为机器视觉系统的核心组件之一,在自动化、智能化和数字化转型中发挥着至关重要的作用。随着技术的不断进步和应用领域的不断拓展,工业相机将迎来更加广阔的发展前景。
51camera机器视觉产品资料查询平台。
相关文章:
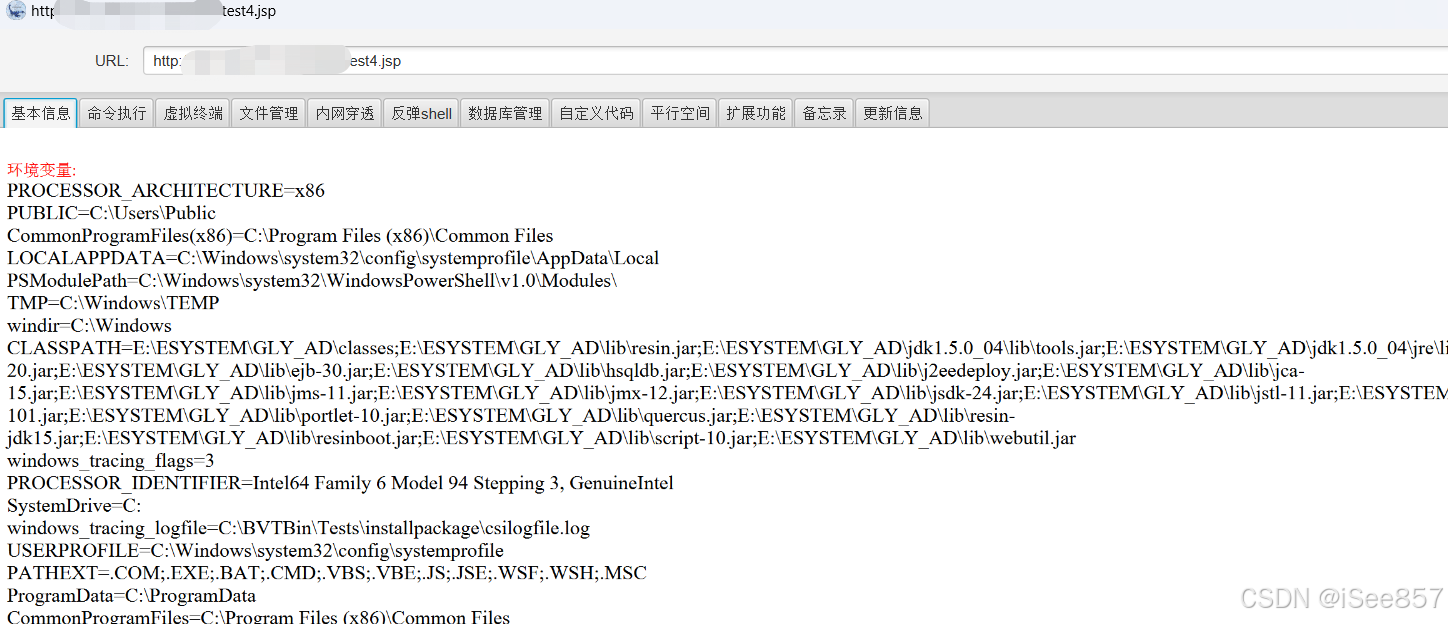
机器视觉系统硬件组成之工业相机篇
工业相机是一种非常重要的机器视觉器件,它能够将被采集的图像信息通过电路转换成电信号,再通过模数转换器(ADC)将其转化为数字信号,最后以标准的视频信号输出。工业相机在机器视觉领域得到了广泛应用,包括质…...
离线安装bitnami-gitlab8.8.4+汉化
注意: 常规安装gitlab需要联网,而按装bitnami-gitlab无需联网(bitnami-gitlab用于内网环境无法联网时安装gitlab,两者是一个东西只是名字不一样)bitnami-gitlab-8.8.4版本可以汉化成功新用户注册账户无需激活也可以直接登录,因为…...
亚马逊日本站推出AI日语listing功能,Listing一键发布,轻松无忧!
随着大数据与人工智能技术的成熟,AI在电商的应用也越来越多,各大电商平台都在陆续引进AI人工智能,有客服方面的,也有发布Listing方面的。 10月17日消息,亚马逊日本站近日宣布推出一项支持日语的人工智能listing功能&am…...
Golang | Leetcode Golang题解之第475题供暖器
题目: 题解: func findRadius(houses, heaters []int) (ans int) {sort.Ints(houses)sort.Ints(heaters)j : 0for _, house : range houses {dis : abs(house - heaters[j])for j1 < len(heaters) && abs(house-heaters[j]) > abs(house-…...

【Vue】Vue3.0 (十二)、watchEffect 和watch的区别及使用
上篇文章: 【Vue】Vue3.0 (十二)、watch对ref定义的基本类型、对象类型;reactive定义的对象类型的监视使用 🏡作者主页:点击! 🤖Vue专栏:点击! ⏰️创作时间&…...

PHP-laravel框架
laravel框架 laravel 搭建与路由基础 基本路由与视图路由 视图使用控制器模板分配变量...

永恒之蓝漏洞
MS17-010是微软于2017年3月发布的一个安全补丁,旨在修复Windows操作系统中的一个严重漏洞,该漏洞被称为“永恒之蓝”(EternalBlue)。这个漏洞影响了Windows的Server Message Block(SMB)协议,允许…...
Eking管理易 Html5Upload 前台任意文件上传漏洞复现
0x01 产品描述: Eking管理易是一款专为广告制品制作企业量身定制的管理软件产品,旨在帮助企业实现规范化、科学化管理,提升运营效率和降低运营成本。 该软件由广州易凯软件技术有限公司开发,基于JAVA企业版技术研发࿰…...
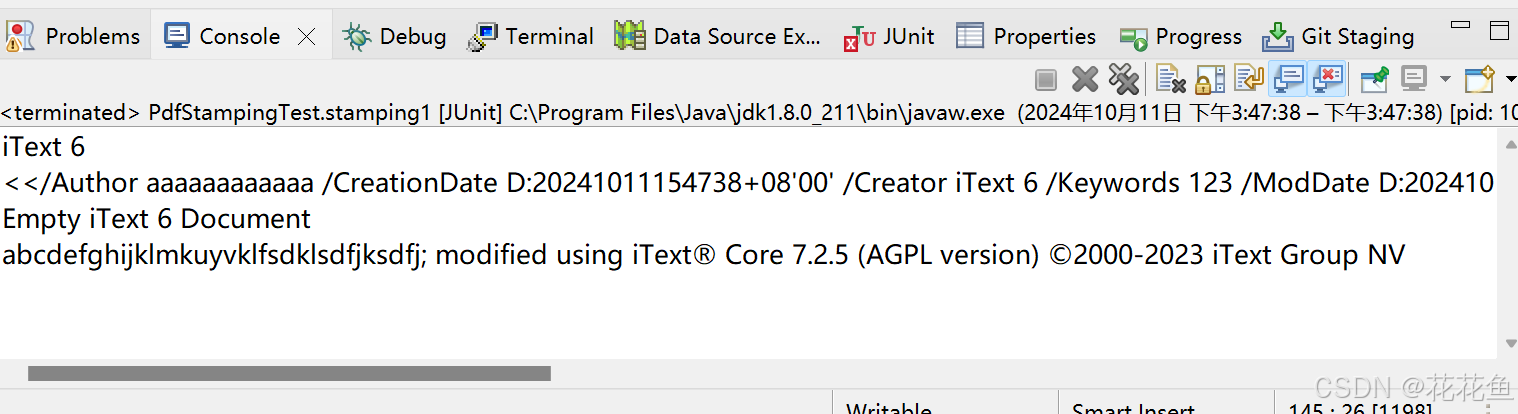
spring boot itext7 修改生成文档的作者、制作者、标题,并且读取相关的信息。
1、官方的example文件:iText GitHub itext-java-7.2.5\kernel\src\test\java\com\itextpdf\kernel\pdf\PdfStampingTest.java 2、修改代码: Testpublic void stamping1() throws IOException {String filename1 destinationFolder "stamping1_…...
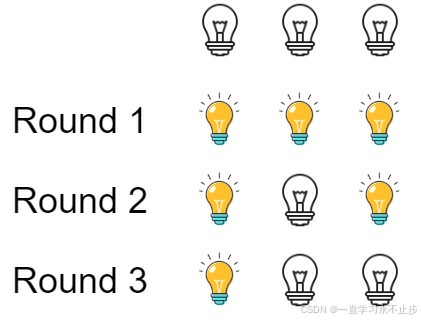
LeetCode题练习与总结:灯泡开关--319
一、题目描述 初始时有 n 个灯泡处于关闭状态。第一轮,你将会打开所有灯泡。接下来的第二轮,你将会每两个灯泡关闭第二个。 第三轮,你每三个灯泡就切换第三个灯泡的开关(即,打开变关闭,关闭变打开&#x…...
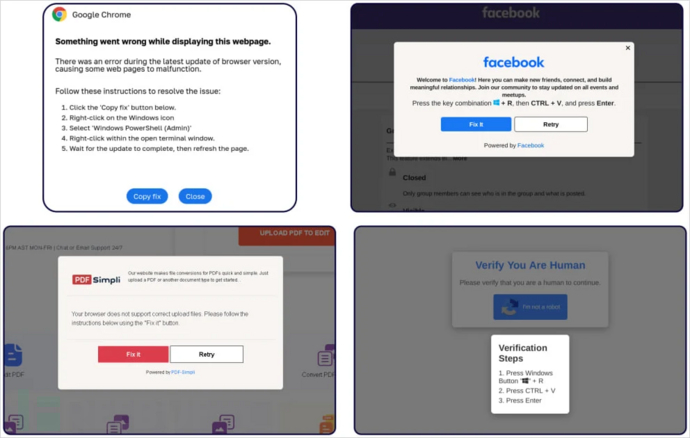
ClickFix攻击活动升级:可通过虚假谷歌会议画面传播恶意软件
最近,研究人员报告了一种新的 ClickFix 攻击活动,主要通过诱骗用户访问显示虚假连接错误的欺诈性 谷歌会议的页面,继而借此传播信息窃取恶意软件,主要针对 Windows 和 macOS 操作系统。 ClickFix是网络安全公司Proofpoint在5月份…...

迷茫!能走出迷茫?
我今年40有余,因资质平庸,及特殊的个人经历,仍奋斗在一线。上班近二十年,两件事对我人生走向影响最大,编程和炒股。 下个月要去一家新公司上班。今天算是在现公司工作交接的最后时段。在这家公司干了接近一年ÿ…...

6.2 遍历重定位表
本节我们将编写一个遍历重定位表的示例程序,打印重定位表。 本节必须掌握的知识点: 遍历重定位表 6.2.1 遍历重定位表 实验四十三:遍历重定位表 以下代码实现打印"c:\\notepad64.exe"进程重定位表的所有信息。 /*--------------…...

面对服务器掉包的时刻困扰,如何更好的解决
在数字化时代,服务器的稳定运行是企业业务连续性的基石。然而,服务器“掉包”现象,即数据包在传输过程中丢失或未能正确到达目的地的情况,却时常成为IT运维人员头疼的问题。它不仅影响用户体验,还可能导致数据不一致、…...
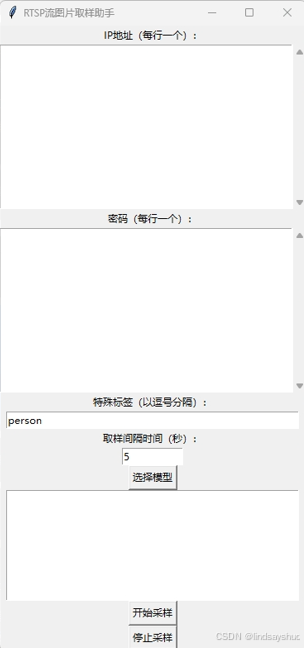
RTSP流图片采样助手(yolov5)
在监控和视频分析领域,实时采样视频流中的图像数据是十分重要的。本文将介绍一个基于Python和Tkinter构建的RTSP流图片采样助手的设计与实现,旨在简化RTSP流的采样过程,并支持根据用户定义的特殊标签进行筛选。 项目概述 该项目的主要功能包…...

MySQL、MariaDB、OceanBase远程异地定时备份脚本
问题背景 公司需要在异地机房远程备份数据库,以防止数据丢失,同时要支持MySQL、MariaDB和OceanBase。由于MariaDB和OceanBase支持MySQL语法,所以可以直接用MySQL Client进行备份。 安装MySQL客户端 yum install mysql编写脚本 编写/backu…...
【远程监控新体验】OpenObserve结合内网穿透无公网IP远程访问全攻略
文章目录 前言1. 安装Docker2. Docker镜像源添加方法3. 创建并启动OpenObserve容器4. 本地访问测试5. 公网访问本地部署的OpenObserve5.1 内网穿透工具安装5.2 创建公网地址6. 配置固定公网地址前言 本文主要介绍如何在Linux系统使用Docker快速本地化部署OpenObserve云原生可观…...
详解)
深度学习:异常检测(Anomaly Detection)详解
异常检测(Anomaly Detection)详解 异常检测,也称为离群点检测,是一种用于识别在数据中显著偏离正常行为或预期模式的数据点的技术。这些异常数据点可能代表系统错误、欺诈行为、网络入侵或任何其他重要且通常需要进一步调查的现象…...

智慧公厕系统提升公共服务满意度
在现代城市化进程中,公共服务体系的完善与提升成为了政府和社会各界的重要任务。作为公共厕所这样一个普遍而基础的市政设施,其服务质量直接影响到市民的生活品质和城市形象。近年来,智慧公厕系统的引入逐渐成为提升公共服务满意度的重要手段…...

幼儿和青少年编程学习路径
1. 引言 编程在现代教育中的重要性 随着信息时代的来临,编程不再是一个小众技能,而是成为未来社会各行业的重要基础能力。从计算机科学到人工智能,再到数据科学和软件工程,编程技能无疑是未来全球经济的核心驱动力之一。越来越多…...

古戏台构件声学特性的时域有限差分方法【附模型】
✨ 长期致力于时域有限差分法、窑洞、戏台、八字墙、共形技术研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)曲面共形网格快速生成算法: …...

AArch64内存管理:MAIR_EL3寄存器详解与应用
1. AArch64内存管理基础与MAIR_EL3寄存器定位 在Armv8-A/v9-A架构中,内存管理单元(MMU)通过多级页表实现虚拟地址到物理地址的转换。当处理器执行内存访问时,MMU会遍历页表条目(Translation Table Entry),其中包含两个关键信息:目…...

【紧急预警】92%的DeepSeek测试用例生成失败源于这4个隐性配置缺陷——资深SDET连夜整理修复清单
更多请点击: https://codechina.net 第一章:DeepSeek测试用例生成的现状与危机本质 当前,DeepSeek系列大模型(如DeepSeek-Coder、DeepSeek-VL)在代码生成与理解任务中展现出强大能力,但其测试用例自动生成…...

别急着扔!12年老ThinkPad X230升级SSD和内存后,Win10流畅得像新电脑
12年老ThinkPad X230重生指南:极简升级打造流畅办公利器每次打开抽屉看到那台积灰的ThinkPad X230,总有种说不出的情感。这款2012年问世的经典商务本,曾陪伴无数人度过加班到凌晨的夜晚。如今性能确实有些力不从心,但直接丢弃又觉…...

TV Bro电视浏览器:为智能电视打造的最佳遥控器上网解决方案
TV Bro电视浏览器:为智能电视打造的最佳遥控器上网解决方案 【免费下载链接】tv-bro Simple web browser for android optimized to use with TV remote 项目地址: https://gitcode.com/gh_mirrors/tv/tv-bro 还在为智能电视上网操作不便而烦恼吗?…...

通过curl命令快速测试Taotoken大模型API的连通性与返回格式
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令快速测试Taotoken大模型API的连通性与返回格式 在集成大模型能力到应用时,开发者通常需要一种快速、轻量的…...

DS4Windows终极指南:3步让PS手柄在PC上完美运行游戏
DS4Windows终极指南:3步让PS手柄在PC上完美运行游戏 【免费下载链接】DS4Windows Like those other ds4tools, but sexier 项目地址: https://gitcode.com/gh_mirrors/ds/DS4Windows 还在为PS手柄连接Windows电脑后无法识别而烦恼吗?🎮…...

打造XBEE封装BLE112蓝牙模块:硬件设计、射频布局与调试全攻略
1. 项目概述:为什么我们需要一个“XBEE格式”的蓝牙模块?在嵌入式开发和物联网项目中,无线通信模块的选择往往决定了项目的成败。对于很多工程师和创客来说,Silicon Labs(芯科科技)的BLE112/113模块是蓝牙4…...

【DeepSeek集成测试黄金标准】:20年专家亲授5大避坑指南与自动化落地框架
更多请点击: https://intelliparadigm.com 第一章:DeepSeek集成测试黄金标准的演进与核心价值 集成测试在大语言模型工程化落地过程中已从“验证功能可用”跃迁为“保障推理一致性、上下文鲁棒性与安全边界的三位一体质量门禁”。DeepSeek系列模型&…...

深入解析NxDumpTool:Switch游戏文件系统提取的终极指南 [特殊字符]
深入解析NxDumpTool:Switch游戏文件系统提取的终极指南 🎮 【免费下载链接】nxdumptool Generates XCI/NSP/HFS0/ExeFS/RomFS/Certificate/Ticket dumps from Nintendo Switch gamecards and installed SD/eMMC titles. 项目地址: https://gitcode.com…...