无人机之位置信息计算篇
一、主要导航技术
卫星导航
全球定位系统(GPS):无人机上装有专门的接收器,用于捕获GPS系统发射的无线电信号。当无人机接收到来自至少四颗卫星的信号时,通过计算信号抵达时间的微小差异,即可运用三角定位原理解算出无人机在地球表面的三维坐标(经度、纬度、海拔),精度可达米级。
其他卫星导航系统:如俄罗斯的格洛纳斯(GLONASS)、欧洲的伽利略(Galileo)或中国的北斗(BDS)等,它们的工作原理与GPS类似,都能为无人机提供高精度的位置信息。
惯性导航
核心组件:陀螺仪和加速度计。陀螺仪持续监测无人机绕各轴的旋转速率,确定无人机的航向(yaw)、俯仰(pitch)和翻滚(roll)姿态。加速度计感应沿X、Y、Z三轴的加速度变化。
工作原理:通过对陀螺仪和加速度计提供的原始数据进行连续的积分运算,惯性导航系统(INS)能推算出无人机的速度和位置变化。尽管INS在长时间运行后会累积误差,但它为无人机提供了无外部依赖的定位能力,尤其在卫星信号暂时不可用时,如穿越高楼林立的城市峡谷或深入地下洞穴。
视觉定位
工作原理:无人机搭载的摄像头或立体视觉传感器捕获周围环境的图像,通过计算机视觉算法识别特征点并与预存地图比对,或实时构建并更新环境地图(SLAM,同时定位与建图)。依据这些视觉信息,无人机能精准计算出自己相对于周围环境的相对位置和姿态。
应用场景:视觉定位系统特别适用于复杂环境或室内飞行任务,它能为无人机提供精确的避障和精准悬停等功能。
二、融合导航技术
为了兼顾定位的精度与可靠性,现代无人机普遍采用融合导航技术,即将卫星导航与惯性导航的数据有机结合。通过复杂的算法如卡尔曼滤波,系统能识别并修正单一导航源的误差,生成更为精确且稳定的定位信息。这种“双保险”策略确保了无人机在面临单一导航系统故障或性能下降时,仍能保持一定的定位能力。
三、其他辅助技术
除了上述主要导航技术外,还有一些辅助技术可以用于提高无人机的位置信息精度,如雷达辅助GNSS定位方法。RALT(雷达高度计)辅助GNSS的方法主要旨在提高GPS的精度、完好性和连续性,以达到飞机着陆的严格导航要求。这种在垂直方向上的高精度范围能够改善整个3D位置解决方案。
四、位置信息计算过程
无人机的位置信息计算过程是一个多步骤、多技术融合的过程。首先,无人机通过卫星导航系统接收来自多颗卫星的信号,并计算出自身的三维坐标。同时,惯性导航系统也在持续工作,提供无人机的航向、速度和位置变化信息。在复杂环境或室内飞行时,视觉定位系统也会发挥作用,为无人机提供精确的相对位置和姿态信息。最后,通过融合导航技术,将这些来自不同导航源的信息进行有机结合和修正,生成更为精确且稳定的定位信息。

相关文章:
无人机之位置信息计算篇
一、主要导航技术 卫星导航 全球定位系统(GPS):无人机上装有专门的接收器,用于捕获GPS系统发射的无线电信号。当无人机接收到来自至少四颗卫星的信号时,通过计算信号抵达时间的微小差异,即可运用三角定位…...

安卓cpu知识
背景 目前的cpu都是多核的,为了有更好的能效,每个核的频率从低往高不等。市面上,大家根据频率不同,都叫大小核。既然分了大小核,那么多核心,就要有不同的cpu调度策略。所以cpu上的所有核,又会根…...

图书管理新纪元:Spring Boot进销存系统
1系统概述 1.1 研究背景 随着计算机技术的发展以及计算机网络的逐渐普及,互联网成为人们查找信息的重要场所,二十一世纪是信息的时代,所以信息的管理显得特别重要。因此,使用计算机来管理图书进销存管理系统的相关信息成为必然。开…...

Application protocol
5 应用协议 在 TS 31.101 [11] 的对应条款中所述的要求适用于 USIM 应用。 在执行后续章节“USIM 安全相关程序”和“订阅相关程序”中的程序之前,必须执行“USIM 管理程序”中列出的程序。“USIM 安全相关程序”中列出的程序是强制性的。“订阅相关程序”中列出的程…...
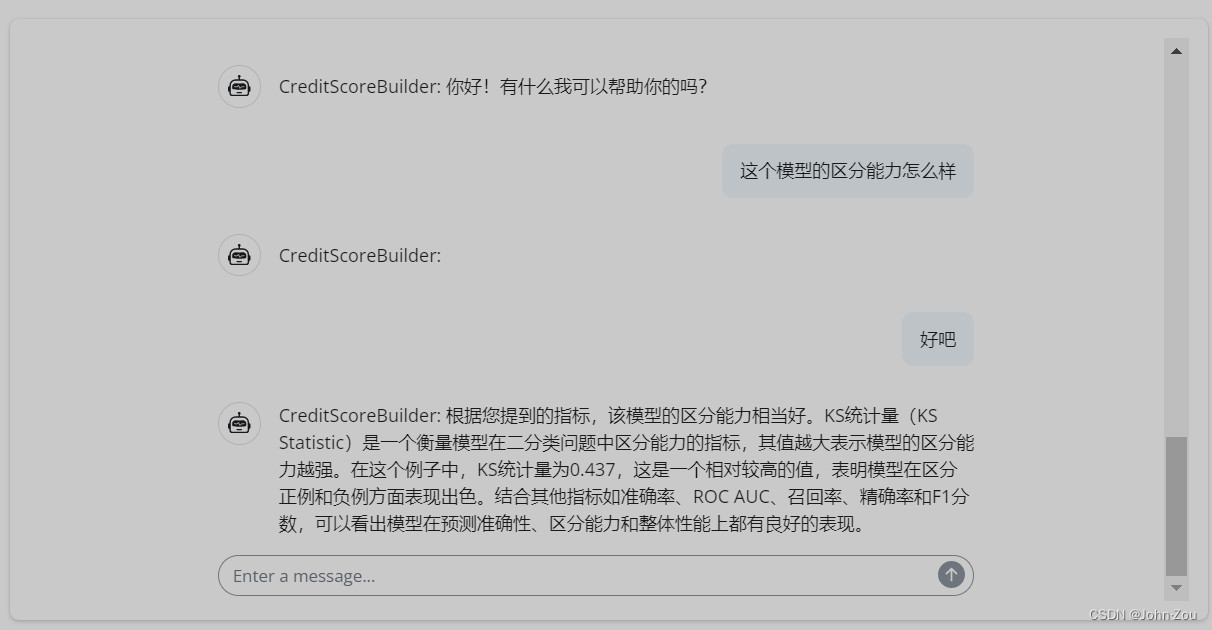
金融信用评分卡建模项目:AI辅助
最近我一直忙着开发一个信用评分卡建模工具,所以没有时间更新示例或动态。今天,我很高兴地跟大家分享,这个工具的基本框架已经完成了,并且探索性的将大语言模型(AI)整合了进去。目前ai在工具中扮演智能助手…...

java对接GPT 快速入门
统一对接GPT服务的Java说明 当前,OpenAI等GPT服务厂商主要提供HTTP接口,这使得大部分Java开发者在接入GPT时缺乏标准化的方法。 为解决这一问题,Spring团队推出了Spring AI ,它提供了统一且标准化的接口来对接不同的AI服务提供商…...
微信小程序引入组件教程
1、安装 node.js 下载网址:https://nodejs.org 2.通过 npm 安装 npm init -y npm i vant/weapp -S --production 3、修改 app.json 将 app.json 中的 “style”: “v2” 去除 4、修改 project.config.json 关于修改 project.config.json 的详细内容&#x…...

STM32—SPI通信外设
1.SPI外设简介 STM32内部集成了硬件SPI收发电路,可以由硬件自动执行时钟生成、数据收发等功能,减轻CPU的负担可配置8位/16位数据帧、高位先行/低位先行时钟频率:fpclk/(2,4,8,16,32,64,128,256)支持多主机模型、主或从操作可精简为半双工/单…...

Ubuntu:用户不在sudoers文件中
1、问题 执行sudo xxx命令时,显示: user 不在sudoers文件中 需要查看系统版本进入恢复模式修复。 2、重启进入恢复模式 查看系统命令:uname -r 可能显示为:6.8.0-45-generic 重启Ubuntu系统,在开机时按ESC进入模…...
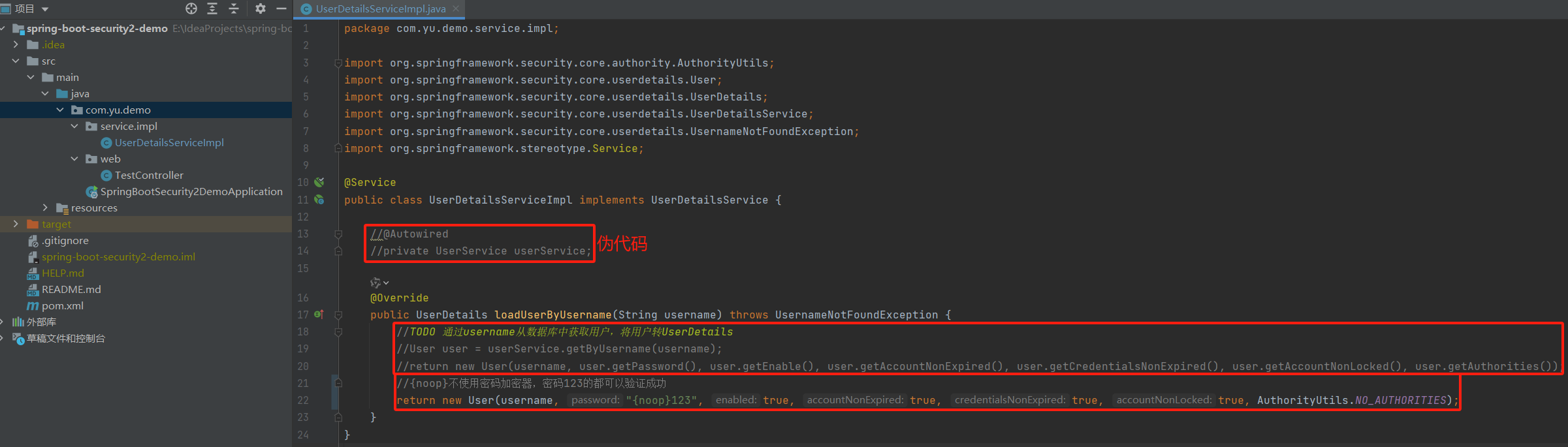
五、Spring Boot集成Spring Security之认证流程2
一、Spring Boot集成Spring Security专栏 一、Spring Boot集成Spring Security之自动装配 二、Spring Boot集成Spring Security之实现原理 三、Spring Boot集成Spring Security之过滤器链详解 四、Spring Boot集成Spring Security之认证流程 五、Spring Boot集成Spring Se…...

接口测试(全)
🍅 点击文末小卡片,免费获取软件测试全套资料,资料在手,涨薪更快 1、什么是接口测试 顾名思义,接口测试是对系统或组件之间的接口进行测试,主要是校验数据的交换,传递和控制管理过程࿰…...

【学习】word保存图片
word中有想保存的照片 直接右键另存为的话,文件总是不清晰,截屏的话,好像也欠妥。 怎么办? 可以另存为 网页 .html 可以得到: 原图就放到了文件夹里面...

【实战篇】用SkyWalking排查线上[xxl-job xxl-rpc remoting error]问题
一、组件简介和问题描述 SkyWalking 简介 Apache SkyWalking 是一个开源的 APM(应用性能管理)工具,专注于微服务、云原生和容器化环境。它提供了分布式追踪、性能监控和依赖分析等功能,帮助开发者快速定位和解决性能瓶颈和故障。…...
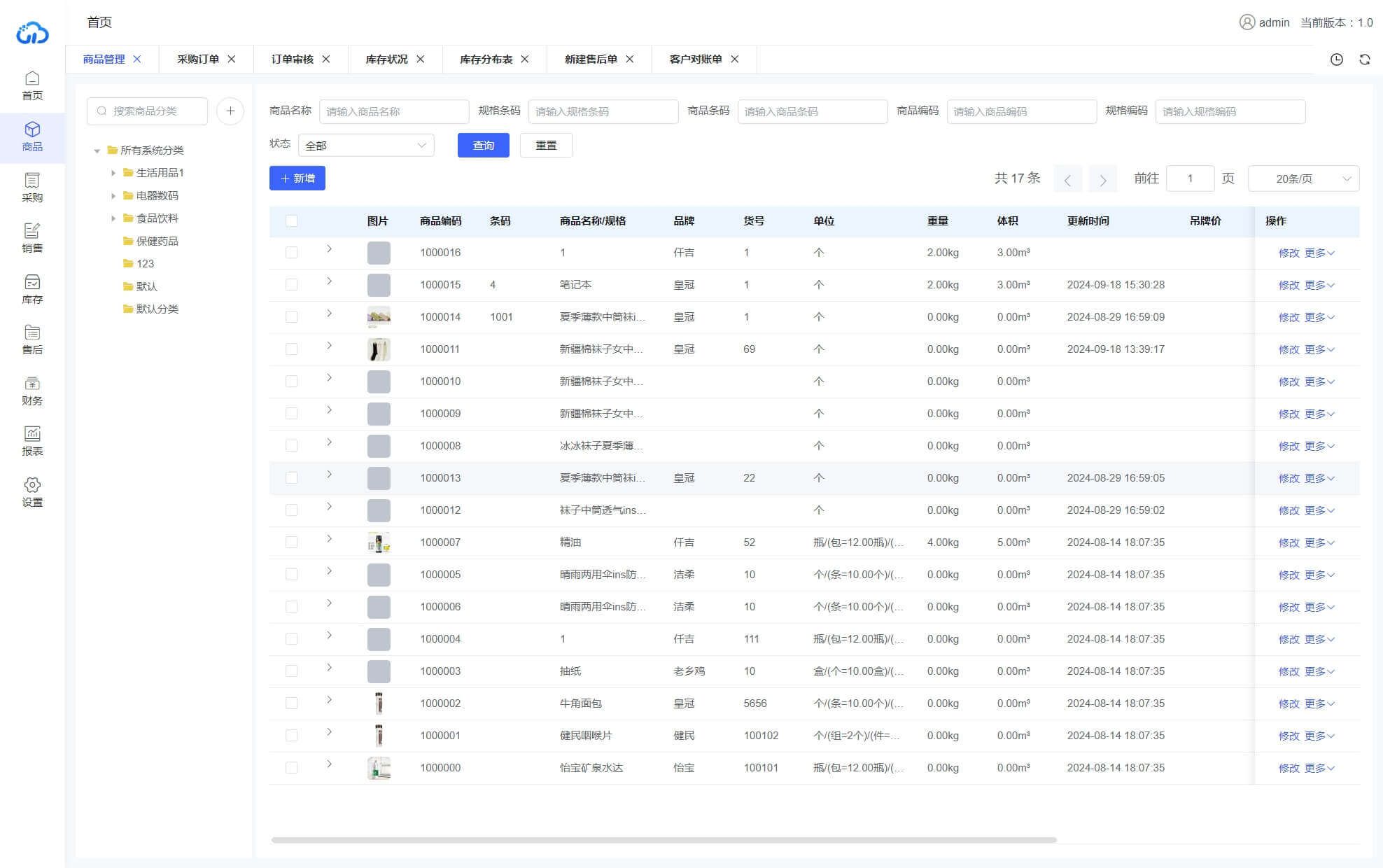
三勾软件/ java+springboot+vue3玖玖云电商ERP多平台源码
玖玖云ERP系统、支持多平台订单同步,仓库发货,波次拣货,售后服务,电商ERP一站式解决方案 项目介绍 玖玖云ERP系统基于javaspringbootelement-plusuniapp打造的面向开发的电商管理ERP系统,方便二次开发或直接使用。主…...

020 elasticsearch7.10.2 elasticsearch-head kibana安装
文章目录 全文检索流程ElasticSearch介绍ElasticSearch应用场景elasticsearch安装允许远程访问设置vm.max_map_count 的值 elasticsearch-head允许跨域 kibana 商品数量超千万,数据库无法使用索引 如何使用全文检索: 使用lucene,在java中唯一…...

基于SpringBoot+Vue的蜗牛兼职网的设计与实现(带文档)
基于SpringBootVue的蜗牛兼职网的设计与实现(带文档) 开发语言:Java数据库:MySQL技术:SpringBootMyBatisVue等工具:IDEA/Ecilpse、Navicat、Maven 该系统主要分为三个角色:管理员、用户和企业,每个角色都有其独特的功能模块,以满…...

Linux 命令 chown 和 chmod 的区别
Linux 命令 chown 和 chmod 的区别 chown的作用:更改文件或目录的所有者和所属用户组chmod的作用:更改文件或目录的访问权限 chown的作用:更改文件或目录的所有者和所属用户组 $ chown [options] user:group file_pathuser:新文件…...

盘点慢查询原因及优化方法
目录 一,前言二,准备 type重点看 三,慢查询原因和解决 1,sql未加索引2,索引失效3,limit深分页问题 (1)limit深分页为什么会慢(2)深分页优化 4,in…...

【热门】智慧果园管理系统解决方案
随着科技的进步,原有农业种植方式已经不能满足社会发展的需要,必须对传统的农业进行技术更新和改造。经过多年的实践,人们总结出一种新的种植方法——温室农业,即“用人工设施控制环境因素,使作物获得最适宜的生长条件,从而延长生产季节,获得最佳的产出”。这种农业生产方式…...

torch.nn.Sequential介绍
torch.nn.Sequential 是 PyTorch 中一个模块容器,用于将一系列层或模块按顺序连接在一起,简化前向传播过程。在 Sequential 中,所有的子模块会按照添加的顺序被执行,适合那些有明确顺序的神经网络结构,比如卷积神经网络、全连接网络等。 主要特点 按顺序执行: 将多个子模…...

Android 11开发避坑:为什么你的App获取的Wifi MAC地址总是变?手把手教你配置固定MAC
Android 11开发实战:彻底解决Wifi MAC地址随机化问题最近在开发一个设备管理系统时,遇到了一个棘手的问题:我们的App在Android 11设备上获取的Wifi MAC地址每次都不一样,导致基于MAC地址的设备识别功能完全失效。经过一周的深入研…...

别再手动改路径了!用LabVIEW + MATLAB Script做自动化测试,这份环境配置指南让你效率翻倍
LabVIEW与MATLAB深度整合:构建自动化测试系统的工程实践指南在工业自动化与测试测量领域,LabVIEW和MATLAB的组合堪称黄金搭档。LabVIEW擅长硬件接口和实时控制,而MATLAB在算法开发和数据分析方面具有无可比拟的优势。本文将深入探讨如何将两者…...

OpenClaw 连接阿里云百炼图文教程
OpenClaw 连接阿里云百炼图文教程 前置准备 已安装并可以正常打开 OpenClaw Windows。 OpenClaw 顶部 Gateway 状态保持在线。 已准备好可正常登录的阿里云账号。 可以正常访问阿里云百炼登录地址:https://bailian.console.aliyun.com/cn-beijing#/home 建议提…...

照着用就行:2026 最新降AIGC软件测评与推荐
2026年真正好用的AI论文降重与改写工具,核心看降重效果、去AI味、格式保留、学术适配四大指标。综合实测,千笔AI、ThouPen、豆包、DeepSeek、Grammarly 是当前最值得推荐的梯队,覆盖从免费到付费、从中文到英文、从文科到理工的全场景需求。 …...

defx.nvim 安装与配置完全教程:从零开始搭建高效文件管理系统 [特殊字符]
defx.nvim 安装与配置完全教程:从零开始搭建高效文件管理系统 🚀 【免费下载链接】defx.nvim :file_folder: The dark powered file explorer implementation for neovim/Vim8 项目地址: https://gitcode.com/gh_mirrors/de/defx.nvim defx.nvim …...

约束感知图缩减算法在量子优化中的应用
1. 约束感知图缩减算法概述在量子计算领域,资源受限一直是制约算法实际应用的主要瓶颈。以当前主流的超导量子计算机为例,其量子比特数通常在50-100个之间,且存在显著的噪声干扰。这种硬件限制使得许多经典优化问题难以直接映射到量子设备上求…...

Awoo Installer:让Switch游戏安装变得简单高效的终极解决方案
Awoo Installer:让Switch游戏安装变得简单高效的终极解决方案 【免费下载链接】Awoo-Installer A No-Bullshit NSP, NSZ, XCI, and XCZ Installer for Nintendo Switch 项目地址: https://gitcode.com/gh_mirrors/aw/Awoo-Installer 厌倦了繁琐的Switch游戏安…...

Lovable电商网站搭建,为什么92%的初创团队在第3周就遭遇性能雪崩?
更多请点击: https://codechina.net 第一章:Lovable电商网站搭建 Lovable 是一个面向中小商户的轻量级电商解决方案,采用现代 Web 技术栈构建,强调可扩展性、用户体验与快速部署。其核心基于 Vue 3(Composition API&a…...

WorkshopDL终极指南:无需Steam客户端也能轻松下载创意工坊模组
WorkshopDL终极指南:无需Steam客户端也能轻松下载创意工坊模组 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 你是否在GOG或Epic Games Store购买了游戏࿰…...

安卓用户如何免费获取大模型API密钥并开始调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 安卓用户如何免费获取大模型API密钥并开始调用 对于安卓开发者或移动端技术爱好者而言,直接体验和调用多种大模型的能力…...