PH47代码框架软件二次开发极简教程
1. 教程说明
本教程适用于对飞控及Stm32程序设计比较熟悉的二次开发者快速掌握PH47框架的使用要点。本教程仅对PH47框架中最主要的二次开发特性进行简要说明,建议与框架中\DevStudio\Algorithms\Controller_Demo.cpp(.h)示例代码配合学习。关于二次开发特性中的详细或高级内容,请参见《PH47框架二次开发教程》。
对于飞控或是Stm32编程不是太熟练的开发者,建议先了解学习Stm32程序设计相关内容,以及《PH47框架二次开发教程》。
1.1 基本概念
- 时间相关、循环控制、调试功能大部分基本功能由框架层全局函数实现。
- 整个PH47框架内,数据读取、写入、交换等操作均依托框架层的数据总线系统(frm.bus),以frm.bus.Function()方式使用。
- 机载调参参数(控制参数)的读取、写入存储均通过框架层的参数系统(core.para)实现,以core.para.Function()方式使用。
- 用户代码一般位于应用层Application当中实现。应用层为用户提供了初始化、快速循环,普通循环、慢速循环函数,以及GCS上行指令响应函数、控制台指令响应函数等重要函数框架供用户扩充使用。
2. 基本全局功能函数使用
2.1 常用全局时间函数
| 函 数 | 功 能 描 述 |
| HAL_Delay() | 用于ms 级延时,执行时独占系统资源 |
| osDelay() | 用于ms 级延时。osDelay() 依赖于 FreeRTOS 启动完成,延时期间可以将系统资源轮换给其他线程使用 |
| gDelay_us() | 用于 us 级别延时。延时时间不要超过 1000us |
| gGetMills() | 获取调用时刻距离 mcu 加电启动时刻的ms时间间隔, 获取数据范围为 4294967296ms,即1193 hour |
| gGetMills_f() | 获取精确到小数点后3位的ms时间, 即精确到us。 gGetMills_f()在运行时间超过4800s后会溢出重置为 0 后重新开始计时 |
| gGetMicros() | 获取mcu加电以来的us时间。 注意: us计时器溢出时间为600s |
2.2 调试功能使用
| 函 数 | 功 能 描 述 |
| TRACE() | 使用邮件队列方式显示格式化字符串。 具有线程安全性,且连续调用能够确保顺序正确。依赖于 PH47 框架的启动完成, 框架启动前不能正常工作。显示时刻会晚于函数调用时刻(滞后不高于 10ms 级别) 。 TRACE("\r\ndemo> 1. TRACE at %.3fms", gGetMills_f()); |
| gPrintf() | 使用中断方式显示格式化字符串。 不依赖于框架的启动完成。连续密集调用时显示的先后顺序可能会发生改变 gPrintf("\r\ndemo> 2. gPrintf at %.3fms", gGetMills_f()); |
| ASSERT(f) | 表达式f真值确认。 若表示式f为false,则核心板状态指示LED连续快速闪烁,当前线程执行停止在ASSERT()语句处,同时在调试串口输出ASSERT语句所在的文件名及代码行号。 |
| bus.arDbg_1[10] bus.arDbg_2[10] | 调试专用总线数据项。只需将调试数据赋值给总线数据项即可。 PH47框架已经预置了调试数据的下行发送机制,用户无需自己实现。 调试数据默认下行发送频率为25hz,运行过程中可调整。 |
3 使用CFreqDiv类进行循环频率控制
- 1/3: 在.h文件中定义一个CFreqDiv类对象_FreqDemo_1Hz。
CFreqDiv _FreqDemo_1Hz;- 2/3: 适当位置对_FreqDemo_1Hz对象进行初始化,如在.cpp文件初始化函数中,设定循环间隔。
_FreqDemo_1Hz.SetRunInv_ms(1000); // 循环控制间隔为 1000ms, 即 1Hz- 3/3: 在需要进行循环频率控制的位置通过IsSetRunInv_ms()函数判断是否达到循环控制条件。此处注意:_FreqDemo_1Hz对象的IsSetRunInv_ms()函数调用在同一循环中只能在一个位置出现一次,不能在多个不同位置多次调用。
if(_FreqDemo_1Hz.IsSetRunInv_ms())
{// do something…
}4. 数据总线基本操作
数据总线系统为整个PH47代码框架提供了设置、获取、交换数据的方法和途径。以及获取诸如设置获取数据时间戳,数据设置时间间隔,数据权限控制等功能。
数据总线系统由一系列总线数据项(Bus item)构成,总线数据项既可以是包含了一个数据简单类型(如 uint8_t,int32,float等)的数据项,也可以是多个具有相关性的数据构成的复杂类型数据项,如结构变量。
4.1 数据总线系统文件包含
用户要在自己的代码文件中使用数据总线功能,只需在自己的.cpp文件开始出加入如下文件包含:
#include"../../Frame/UseGlobalObject.h" //文件包含路径根据实际情况确定数据总线中数据项的声明位于如下文件中:
\DevStudio\BoardConfig\Board_BBDB\DataBus_BBDB.h
数据总线中复杂类型数据项(框架内置)的结构声明位于如下文件中:
\DevStudio\Frame\Core\BusItemFormatDef.h
4.2 数据总线功能函数使用
| 函 数 | 功 能 描 述 |
| Get() | 读取数据总线数值 Vector3f vAcc = bus.sImu.AccRaw.Get(); // 获取总线数据项数值 TRACE("\r\n> Acc %.2f %.2f %.2f", vAcc.x, vAcc.y, vAcc.z); |
| Set() | 设置数据总线数值。 本函数在设置总线数值的同时,对当前总线数据的时间戳进行了设置。 // demo 1 bus.arDbg_2[0].Set(2.234); // demo 2 MICOLINK_PAYLOAD_RANGE_SENSOR_t payload; payload.distance = 10.5f; payload.strength = 1.0f; bus.OptiFlowTof_MTF01.Set(&payload); // 设置总线数据项数值 |
| GetTimeStamp_ms() | 获取 AccRaw 以 ms 为单位时间戳的整数部分,示例见下。 |
| GetTmStampDec_us() | 获取 AccRaw 以 ms 为单位时间戳的 3 位小数部分(即精确到 us),示例见下。 |
| GetDt2Prev_us() | 获取总线数据项最近两次被设置(Set)之间的时间间隔(us) // 上述三个函数综合示例 TRACE("\r\n> AccRaw timeTag:%d.%dms dt:%dus", bus.sImu.AccRaw.GetTimeStamp_ms(), // 时间戳整数部分(ms) bus.sImu.AccRaw.GetTmStampDec_us(), // 时间戳小数部分(us) bus.sImu.AccRaw.GetDt2Prev_us()); // 最近两次设置时间间隔(us) |
4.3 全局变量
全局变量变量是一种特殊的总线数据,用于在整个PH47代码框架内表示系统状态,分为bool型和uint8_t型两种类型。整个框架共有48个bool型,8个uint8_t类型全局变量。
PH47代码框架以及CSS插件已经预置了全局变量的发送及解析机制,以5Hz频率下行发送更新。用户在PH47框架中只需对其进行设置或读取即可。
| 函 数 | 功 能 描 述 |
| gGetStatus() GetStatus() | 读取全局变量数值。 gGetStatus()等同于GetStatus(),只是前者为全局函数形式,后者需要通过core对象进行引用。 gGetStatus(S_IMU_STILL); // bool 类型 core.GetStatus(S_RC_ALIVE); uint8_t uTmp = gGetStatus(S_SYSTEM_STATUS_TAG); // uint8_t 类型 |
| gSetStatus() SetStatus() | 设置全局状态变量。 参数blForceUpdate为true表示无论当前全局状态变量数值如何都进行设置。 false表示若待设置数值与当前数值相同就不进行设置 gSetStatus(S_WATCH_DOG_MODE, true, true); |
4.4 自定义简单类型总线数据项
在\DevStudio\BoardConfig\Board_BBDB\DataBus_BBDB.h文件中注释为"用户自定义设置区域"内加入自有总线数据的定义(注意!不要对该区域以外的总线数据声明进行任何修改或删除!):
// <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>
// 用户自定义参数设置区域, 不得对该区域之外的任何内容进行修改
CBusItem<float> fAspdDiffPress; // float类型的bus item
// <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>之后就可以使用总线相关函数实现各种功能了
4.5 自定义复杂类型总线数据项目
- 1/3:在需要使用总线的.cpp文件头部加入对数据总线的文件包含:
#include"../../Frame/UseGlobalObject.h"- 2/3:在如下文件中加入对复杂类型的结构声明(用户自定义):
\DevStudio\BoardConfig\Board_BBDB\BusItemDef4User.h
struct BUS_ITEM_DEMO
{CBusItem<uint8_t> Item_A;CBusItem<float> Item_B;
};- 3/3:在\DevStudio\BoardConfig\Board_BBDB\DataBus_BBDB.h文件的“用户自定义参数设置区域”加入总线数据的定义:
// <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>
// 用户自定义参数设置区域, 不得对该区域之外的任何内容进行修改
BUS_ITEM_DEMO sBusItemDemo;
// <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>4.6 自定义全局状态变量
文件DevStudio\BoardConfig\Board_BBP\StateVarDef_BBP.h对全局状态变量的ID进行了定义,此文件中的enum STATUS_BOOL及enumSTATUS_UINT枚举分别定义了bool及uint8_t类型的全局状态变量ID。
与自定义总线数据类似,自定义全局状态变量必须位于标注“用户自定义参数设置区域”的区域内。二次开发者不能对该区域意外的任何内容进行删除或修改。
- 1/2:在DevStudio\BoardConfig\Board_BBDB\StateVarDef_BBDB.h文件的enum STATUS_BOOL声明的用户自定义部分加入S_STATUS_VAR_DEMO声明
// <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>
// 用户自定义 全局状态变量 设置区域, 不得对该区域之外的任何内容进行修改
S_STATUS_VAR_DEMO, // 直接定义 id 即可
// <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>- 2/2:之后在程序中需要的地方就可以通过下述函数设置或是获取状态;
gSetStatus(S_STATUS_VAR_DEMO, true);
bool blStatus = gGetStatus(S_STATUS_VAR_DEMO);5. 机载参数系统基本操作
机载控制参数系统为整个PH47代码框架提供了控制参数的读取、写入、空地间传输等功能的全套使用解决方案。
机载参数数据存储于控制板外置 flash 或 eeprom 存储器中。可通过 CSS控制站以单个或批量的方式下载及上传设定。
5.1 参数系统文件包含
用户要在自己的代码文件中使用参数系统功能,只需在自己的.cpp文件开始处加入如下文件包含:
#include"../../Frame/UseGlobalObject.h" //文件包含路径根据实际情况确定参数系统的参数id定义,以及参数默认属性设置(参数字典),分别位于如下文件中:
\DevStudio\BoardConfig\Firmware_BBDB\ParamDict_BBDB.h
\DevStudio\BoardConfig\Firmware_BBDB\ParamDict_BBDB.cpp
5.2 参数系统功能使用
| 函 数 | 功 能 描 述 |
| Get() | 读取记载参数数值。 Get() 函数获取的参数存储于RAM中,若存储器(flash/e2prom)中参数被CSS上传设定所更新,或被程序中其他参数设定函数所改变,则RAM中参数数值也自动更新,用户无需手动刷新。 // 获取当前设定的遥测通讯波特率 uint32_t uBaudRate = (uint32_t)(core.para.Get(P_BAUD_RATE)); // 获取加速度计x轴偏移量 float fVal = frm.para.Get(P_SENSOR_ACC_OFST_X); |
| Set() | 设置机载调参参数数值。 blForcesave决定是否对存储介质(Flash或EEprom)存储数据进行强制更新。 为 ture时不能进行高速率(>50hz)密集调用,否则有可能造成存储器密集写入超时而导致数据存储失败 // 设置参数数值强制更新存储 core.para.Set(P_SENSOR_ACC_OFST_X, _cal_acc_offset.x, true); // 仅对RAM当中的参数数值进行更新,控制板重启后丢失 frm.para.Set(P_SENSOR_ACC_OFST_X, blSave) |
5.3 自定义参数的实现
- 1/3:在ParaDict_BBDB.h文件enum PARAID枚举定义的用户区域当中加入新参数P_TEST_USER_1的 id 的定义,无需为id指定特定数值,顺序排列即可。在 CSS 参数下载列表中的顺序以enum PARAID当中的顺序为准。
// <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>// 用户自定义参数设置区域, 不得对该区域之外的任何内容进行修改P_TEST_USER_1, // 自定义参数 id// <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>- 2/3:在ParaDict_BBDB.cpp文件全局数组g_arParaDictMCU[]参数字典的用户区域中加入新参数的属性数据。enum PARAID中参数id的数值及顺序与g_arParaDictMCU[]各元素均无关系,可根据实际需要组织。
// <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>// 用户自定义参数设置区域, 不得对该区域之外的任何内容进行修改// 自定义参数 P_TEST_USER_1 的默认属性进行设置//{"TestUser_1", P_TEST_USER_1, 0x0000, 256.0f, 0.0f, 500.0f}, // <=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>=<=>- 3/3;修改参数字典并编译下载至控制板后,必须通过控制板的调试串口运行一次 "initfstrun;"命令以初始化存储器数据。
6. 遥测通讯系统使用
PH7 代码框架通过 mavlink plus 协议与地面控制站 GCS,或其他无人控制目标进行双向通讯。mavlink plus 协议在mavlink 1.0基础上增加修改了message 设置,并对 GCS 上行控制命令实施真伪性动态甄别。
6.1 遥测通讯系统文件包含
若在用户二次开发代码中使用mavlink通讯功能,那么就需要在自己的代码中加入如下文件包含:
#include "/DevStudio/Frame/Core/MavlinkInterface.h"#include "/DevStudio/Frame/Core/MavlinkWrap.h"6.2 遥测通讯系统功能使用
在整个 PH7 代码框架内对 GCS 的数据通讯以core.mavlink.FunName()的形式来使用 mavlink 协议相关功能函数。
对其他控制目标的数据通讯以core.consolelink.FunName()的形式来使用 mavlink 通讯相关功能函数。
PH47代码框架已对Message的下行发送进行了完善的封装,为不同类型的Message设定了不同的发送速率,发送速率在运行过程中可重新设定调整。整个Message的下行发送机制为全自动执行,用户在仅需在发送message时以core.mavlink.AddMsg_xxx()形式调用对应函数,即可将待发送消息加入下行消息发送队列随即自动发送。二次开发用户常用消息发送函数如下:
| 函 数 | 功 能 描 述 |
| AddMsg_Ctrl_Base() | 下行发送飞控控制器相关数据 |
| AddMsg_Atms_Data() | 下行发送大气相关数据 |
| AddMsg_GpsRawInt() | 下行发送GPS相关数据 |
| AddMsg_Raw_Imu() | 下行发送IMU相关数据 |
| AddMsg_Attitude() | 下行发送姿态相关数据 |
| AddMsg_Debug_1() | 下行发送调试数据 1 |
| AddMsg_Debug_2() | 下行发送调试数据 2 |
| AddMsg_StatusText() | 下行发送状态信息 |
mavlink message 发送示例:
// demo 1: 下行发送心跳包
mavlink_heartbeat_t packet;
memset(&packet, 0x00, sizeof(packet));packet.base_mode = (uint8_t) 6;
packet.system_status = 0xA5;
packet.autopilot = BOARD_PH7;
packet.custom_mode = 0xEE;
packet.mavlink_version = MAVLINK_VERSION;uRet = core.mavlink.AddMsg_HeartBeat(&packet); // 加入发送队列,随后自动发送demo 2: 下行发送状态信息
char szTmp[32] = {""};
gFormat(szTmp, "Log %d HIL sim start.", uFlightNum);
core.mavlink.AddMsg_StatusText(szTmp, MAV_SEVERITY_WARNING);// 更多Message发送使用方法可见文件:\DevStudio\Frame\Frame.cpp 当中的
// void MavMsgSnd2GCS_Slow() 函数7. 应用层框架预制功能函数的使用
PH47框架在应用层\DevStudio\Application\App_BBP.cpp(.h)文件,即应用层类CAppBBDB中预置了多个供二次开发用户使用的功能函数,用户根据上述函数的功能特性,有针对性的在其中加入自己的代码即可方便的进行二次开发。
| 函数名称 CAppBBDB类成员函数 | 功 能 描 述 |
| Init() | PH47框架完全启动后调用该初始化函数 在本函数中可安全使用 ASSERT, TRACE 等依赖于框架启动的函数 |
| FastThread_1000Hz() | 快速线程函数,调用频率在400—500hz之间波动。 |
| NormalThread_250Hz() | 普通线程函数,调用频率固定为250hz |
| SlowThread_50Hz() | 慢速线程函数,调用频率固定为50hz |
| HandleRevMavlinkMsg() | mavlink 用户自定义上行控制指令处理函数 |
| HandleConsoleCmd() | 调试控制台用户自定义命令处理函数 |
7.1 程序示例:
普通线程函数示例
void CAppBBDB::NormalThread_250Hz()
{// 获取循环间隔时间float fDt = 0.0f;if(_NormalLoopDt.GetLocalDt_ms(fDt) == false)return;// Controller_Common 示例代码algo._pController_Common->Update(fDt);
}接收 mavlink message 用户自定义上行指令处理示例
void CAppBBDB::HandleRevMavlinkMsg(mavlink_command_long_sa_t *pPacket)
{//解析及响应 GCS 上行控制命令if(pRevMsg ->msgid == MAVLINK_MSG_ID_COMMAND_LONG_SA ){mavlink_command_long_sa_t packet;mavlink_msg_command_long_sa_decode(pRevMsg, &packet);if(packet.command == MAV_CMD_USER_DEFINE){ if(packet.param1 == fValue){// User code ...}}}
}用户自定义调试控制台命令处理函数示例
void CAppBBDB::HandleConsoleCmd(uint8_t *pBuff)
{// pBuff 为用户命令字符串,命令字符串最长不能超过 32 byteif(strcmp((char *) pBuff, "User CMD") == 0){// User code ...}
}
更多内容见CSDN博客专栏:无人机飞控![]() https://blog.csdn.net/ss15/category_9690939.html?spm=1001.2014.3001.5482相关资源:PH47: PH47运动控制代码框架.
https://blog.csdn.net/ss15/category_9690939.html?spm=1001.2014.3001.5482相关资源:PH47: PH47运动控制代码框架.![]() https://gitee.com/ss15/ph47
https://gitee.com/ss15/ph47
相关文章:
PH47代码框架软件二次开发极简教程
1. 教程说明 本教程适用于对飞控及Stm32程序设计比较熟悉的二次开发者快速掌握PH47框架的使用要点。本教程仅对PH47框架中最主要的二次开发特性进行简要说明,建议与框架中\DevStudio\Algorithms\Controller_Demo.cpp(.h)示例代码配合学习。关于二次开发特性中的详细…...

SQL Server-导入和导出excel数据-注意事项
环境: win10,SQL Server 2008 R2 之前写过的放在这里: SqlServer_陆沙的博客-CSDN博客 https://blog.csdn.net/pxy7896/category_12704205.html 最近重启ASP.NET项目,在使用sql server导出和导入数据时遇到一些问题,特…...

Linux系统:配置Apache支持CGI(Ubuntu)
配置Apache支持CGI 根据以下步骤配置,实现Apache支持CGI 安装Apache: 可参照文章: Ubuntu安装Apache教程。执行以下命令,修改Apache2配置文件000-default.conf: sudo vim /etc/apache2/sites-enabled/000-default.con…...

qt 序列化和反序列化
序列化:QByteArray buffer; QBuffer bufferDevice(&buffer); bufferDevice.open(QIODevice::WriteOnly); QDataStream out(&bufferDevice); out.setVersion(QDataStream::Qt_5_13); 反序列化: void deserialize(const QByteArray &buffer) {…...

java实现文件变动监听
在文件的内容发生变动时,应用可以感知这种变种,并重新加载文件内容,更新应用内部缓存 实现 轮询:定时器Timer,ScheduledExecutorService 判断文件修改:根据java.io.File#lastModified获取文件的上次修改时…...

Maven的使用
1. Maven 简介 https://maven.apache.org/ Maven 是一个强大的项目管理和构建工具,广泛应用于 Java 项目中,旨在简化项目的依赖管理、构建、测试、部署等工作。Maven 主要通过定义 pom.xml(Project Object Model 文件)来管理项…...

C++开发进阶1:C++编程命名规范
进行C开发时最基础且最重要的是命名规范,掌握良好的命名规范能增加代码的可读性。 认识文件: .cpp:C 源文件. .h或.hpp:C 头文件 .tpp模板实现文件(如果模板定义和实现分开) .inl内联文件,…...

Android 图片相识度比较(pHash)
概述 在 Android 中,要比对两张 Bitmap 图片的相似度,常见的方法有基于像素差异、直方图比较、或者使用一些更高级的算法如 SSIM(结构相似性)和感知哈希(pHash)。 1. 基于像素的差异比较 可以逐像素比较…...

Gitlab 完全卸载–亲测可行
1、停止gitlab gitlab-ctl stop2.卸载gitlab(注意这里写的是gitlab-ce) rpm -e gitlab-ce 3、查看gitlab进程 ps aux | grep gitlab 4、杀掉第一个进程(就是带有好多.............的进程) 5、删除所有包含gitlab文件 find / …...

gitlab操作和管理
详细的说明下这几条指令: Git global setup git config --global user.name “” git config --global user.email “” Create a new repository git clone ssh://git12/letect.git cd vlm-event-secondary-detect git switch -c main touch README.md git add RE…...

ctfshow-web入门-反序列化(web254-web258)
目录 1、web254 2、web255 3、web256 4、web257 5、web258 1、web254 传入符合要求的用户名和密码即可: ?usernamexxxxxx&passwordxxxxxx 拿到 flag:ctfshow{e4795ccd-6bff-44b6-a15c-6c679d802e61} 2、web255 整体逻辑代码和上一道差不多 新…...
)
repo 命令大全详解(第十一篇 repo init)
repo forall 命令用于在指定的项目上执行给定的命令,非常适合批量操作。 参数分类及解释 基本参数 [<project>...]: 可选,指定要操作的项目。如果不指定,则对所有项目执行命令。 示例: repo forall my_project -c "git status&q…...

ComfyUI | 全新ComfyUI前端操作指南:提升你的工作速度!
随着WebUI基本停更,越来越多的AI创作者转向了ComfyUI。 ComfyUI最大的优势是简洁、高效、占用显存低,工作流模式虽然有一点入门难度,但一旦上手,操作非常舒适。 由于原Stable Diffusion团队的参与,ComfyUI的易用度也…...

nginx解决非人类使用http打开的443,解决网安漏扫时误扫443端口带来的问题
一、问题描述 正常访问https的站点时,使用网址https://www.baidu.com,但会有一种错误的访问请求http://www.baidu.com:443,一般都是非人类所为,如漏洞扫描工具,那么请求以后带来的后果是个错误页面 400 Bad Request T…...
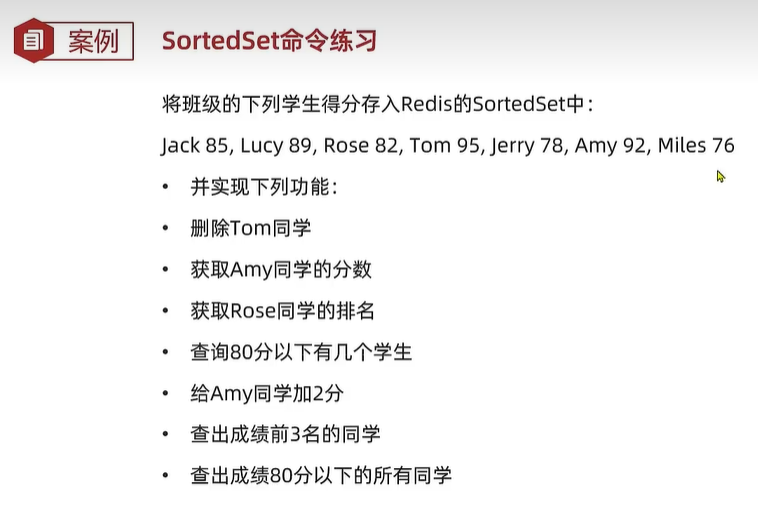
黑马 | Reids | 基础篇
黑马reids基础篇 文章目录 黑马reids基础篇一.初始Redis1.1SQL 和 NoSql的区别1.1.1结构化和非结构化1.1.2关联和非关联1.1.3查询方式1.1.4 事务1.1.5总结 1.2 认识Redis1.3 Redis安装启动默认启动:后台启动:开机自启 1.4 Redis客户端1.4.1.Redis命令行客…...
SAP-换登录界面图片
SMW0 二、SM30 (将value值删除,登录图片恢复默认) 重新登录,更改成功。...

移动 Web核心笔记(二)
空间转换 空间:是从坐标轴角度定义的 X 、Y 和 Z 三条坐标轴构成了一个立体空间,Z 轴位置与视线方向相同。 空间转换也叫 3D转换 属性:transform 平移 /*单独设置 z轴效果不明显*/ transform: translate3d(x, y, z); transform: translateX(…...
MySQL创建和管理表
1. 基础知识 存储数据是处理数据的第一步,只有正确地把数据存储起来,才能进行有效的处理和分析。 在 MySQL 中,一个完整的数据存储过程总共有 4 步,分别是创建数据库、确认字段、创建数据表、插入数据。 从系统架构的层次上看…...

【从零开始的LeetCode-算法】910. 最小差值 II
给你一个整数数组 nums,和一个整数 k 。 对于每个下标 i(0 < i < nums.length),将 nums[i] 变成 nums[i] k 或 nums[i] - k 。 nums 的 分数 是 nums 中最大元素和最小元素的差值。 在更改每个下标对应的值之后…...

周报 | 24.10.14-24.10.20文章汇总
为了更好地整理文章和发表接下来的文章,以后每周都汇总一份周报。 周报 | 24.10.7-24.10.13文章汇总-CSDN博客 OpenCV与AI深度学习 | T-Rex Label !超震撼 AI 自动标注工具,开箱即用、检测一切-CSDN博客 计算机视觉与机器学习 | 目标检测 …...

智能车视觉巡线:从图像处理到PID控制的嵌入式实战解析
1. 项目概述:一场关于速度与精度的极限挑战十多年前,当飞思卡尔(Freescale)智能车竞赛还是校园里最硬核的科技赛事之一时,摄像头组的较量无疑是皇冠上的明珠。它不像光电组依赖地面反射,也不像电磁组追寻导…...
的3D视觉原理与应用)
从‘看见’到‘看懂’:手把手拆解RGB-D摄像头(如Intel Realsense)的3D视觉原理与应用
从‘看见’到‘看懂’:手把手拆解RGB-D摄像头的3D视觉原理与应用 当你第一次看到RGB-D摄像头生成的彩色点云在屏幕上旋转时,那种将现实世界数字化的震撼感令人难忘。但真正让这种设备发挥价值的,是理解它如何将光信号转化为三维坐标的完整技术…...

如何通过QuickLookVideo实现Mac视频预览效率革命:终极工具深度解析
如何通过QuickLookVideo实现Mac视频预览效率革命:终极工具深度解析 【免费下载链接】QuickLookVideo This package allows macOS Finder to display thumbnails, static QuickLook previews, cover art and metadata for most types of video files. 项目地址: ht…...

Ubuntu下编译与测试libwebsockets:从x86环境验证到嵌入式移植
1. 项目概述与背景 在嵌入式开发中,尤其是涉及到网络通信模块时,我们常常会遇到一个典型的困境:直接在资源受限的目标板(比如ARM架构的开发板)上进行代码的编译、调试和功能验证,过程往往非常痛苦。编译速…...

软件测试从思维到实战:测试设计黄金法则与黑盒/灰盒/白盒全解析
📌为什么你的测试用例找不到Bug?你是否遇到过这样的场景:辛辛苦苦写了几十个测试用例,执行完发现一切正常,信心满满地发布上线。结果用户一用,马上就发现了严重问题。问题出在哪里?不是你的执行…...

DragGAN交互式图像编辑:基于GAN潜空间优化的点驱动形变技术详解
1. 项目概述:交互式生成对抗网络的直观革命最近在AIGC的圈子里,一个名为“DragGAN”的研究项目火了。它实现的效果非常直观且震撼:你上传一张由生成对抗网络(GAN)生成的图片,比如一只狮子、一辆汽车或一张人…...

御坂翻译器:3分钟开启你的日语游戏无障碍之旅
御坂翻译器:3分钟开启你的日语游戏无障碍之旅 【免费下载链接】MisakaTranslator 御坂翻译器—Galgame/文字游戏/漫画多语种实时机翻工具 项目地址: https://gitcode.com/gh_mirrors/mi/MisakaTranslator 你是否曾经因为语言障碍而错过了那些精彩的日系游戏剧…...

QMC音频解密技术深度解析:算法实现与性能优化
QMC音频解密技术深度解析:算法实现与性能优化 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder QMC音频解密工具是一款专注于QQ音乐加密格式解密的开源解决方案&a…...
)
从开发到上线:UniApp小程序跳转全流程配置指南(含环境区分与版本管理)
UniApp跨小程序跳转工程化实践:多环境配置与版本管理全解析 在移动互联网生态中,小程序间的相互跳转已成为提升用户体验的关键链路。作为技术负责人,我曾亲历过因环境配置错误导致的线上事故——某次紧急更新中,由于跳转参数未区分…...

RVC-WebUI终极指南:5步掌握AI语音克隆与声音转换技术
RVC-WebUI终极指南:5步掌握AI语音克隆与声音转换技术 【免费下载链接】rvc-webui liujing04/Retrieval-based-Voice-Conversion-WebUI reconstruction project 项目地址: https://gitcode.com/gh_mirrors/rv/rvc-webui RVC-WebUI是一个基于检索式语音转换技术…...