【深度学习实验七】 自动梯度计算
目录
一、利用预定义算子重新实现前馈神经网络
(1)使用pytorch的预定义算子来重新实现二分类任务
(2)完善Runner类
(3) 模型训练
(4)性能评价
二、增加一个3个神经元的隐藏层,再次实现二分类,并与1做对比
三、自定义隐藏层层数和每个隐藏层中的神经元个数,尝试找到最优超参数完成二分类。可以适当修改数据集,便于探索超参数。
一、利用预定义算子重新实现前馈神经网络
点击查看已经实现的前馈神经网络
(1)使用pytorch的预定义算子来重新实现二分类任务
导入必要的库和模块:
from data import make_moons
from nndl import accuracy
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import torch
from Runner2_1 import RunnerV2_2
import matplotlib
matplotlib.use('TkAgg')
import matplotlib.pyplot as plt定义的网络结构 Model_MLP_L2_V2:
class Model_MLP_L2_V2(nn.Module):def __init__(self, input_size, hidden_size, output_size):super(Model_MLP_L2_V2, self).__init__()# 定义第一层线性层self.fc1 = nn.Linear(input_size, hidden_size)# 使用正态分布初始化权重和偏置self.fc1.weight.data = torch.normal(mean=0.0, std=1.0, size=self.fc1.weight.data.size())self.fc1.bias.data.fill_(0.0) # 常量初始化偏置为0# 定义第二层线性层self.fc2 = nn.Linear(hidden_size, output_size)self.fc2.weight.data = torch.normal(mean=0.0, std=1.0, size=self.fc2.weight.data.size())self.fc2.bias.data.fill_(0.0) # 常量初始化偏置为0# 定义Logistic激活函数self.act_fn = torch.sigmoidself.layers = [self.fc1, self.act_fn, self.fc2,self.act_fn]# 前向计算def forward(self, inputs):z1 = self.fc1(inputs)a1 = self.act_fn(z1)z2 = self.fc2(a1)a2 = self.act_fn(z2)return a2
数据集构建和划分:
# 数据集构建
n_samples = 1000
X, y = make_moons(n_samples=n_samples, shuffle=True, noise=0.2)
# 划分数据集
num_train = 640 # 训练集样本数量
num_dev = 160 # 验证集样本数量
num_test = 200 # 测试集样本数量
# 根据指定数量划分数据集
X_train, y_train = X[:num_train], y[:num_train] # 训练集
X_dev, y_dev = X[num_train:num_train + num_dev], y[num_train:num_train + num_dev] # 验证集
X_test, y_test = X[num_train + num_dev:], y[num_train + num_dev:] # 测试集
# 调整标签的形状,将其转换为[N, 1]的格式
y_train = y_train.reshape([-1, 1])
y_dev = y_dev.reshape([-1, 1])
y_test = y_test.reshape([-1, 1])可视化生成的数据集
plt.figure(figsize=(5, 5)) # 设置图形大小
plt.scatter(x=X[:, 0], y=X[:, 1], marker='*', c=y, cmap='viridis') # 绘制散点图
plt.xlim(-3, 4) # 设置x轴范围
plt.ylim(-3, 4) # 设置y轴范围
plt.grid(True, linestyle='--', alpha=0.3) # 添加网格
plt.show() # 显示图形(2)完善Runner类
基于上一节实现的 RunnerV2_1 类,本节的 RunnerV2_2 类在训练过程中使用自动梯度计算;模型保存时,使用state_dict方法获取模型参数;模型加载时,使用set_state_dict方法加载模型参数.
import os
import torch
class RunnerV2_2(object):def __init__(self, model, optimizer, metric, loss_fn, **kwargs):self.model = modelself.optimizer = optimizerself.loss_fn = loss_fnself.metric = metric# 记录训练过程中的评估指标变化情况self.train_scores = []self.dev_scores = []# 记录训练过程中的评价指标变化情况self.train_loss = []self.dev_loss = []def train(self, train_set, dev_set, **kwargs):# 将模型切换为训练模式self.model.train()# 传入训练轮数,如果没有传入值则默认为0num_epochs = kwargs.get("num_epochs", 0)# 传入log打印频率,如果没有传入值则默认为100log_epochs = kwargs.get("log_epochs", 100)# 传入模型保存路径,如果没有传入值则默认为"best_model.pdparams"save_path = kwargs.get("save_path", "best_model.pdparams")# log打印函数,如果没有传入则默认为"None"custom_print_log = kwargs.get("custom_print_log", None)# 记录全局最优指标best_score = 0# 进行num_epochs轮训练for epoch in range(num_epochs):X, y = train_set# 获取模型预测logits = self.model(X)# 计算交叉熵损失trn_loss = self.loss_fn(logits, y)self.train_loss.append(trn_loss.item())# 计算评估指标trn_score = self.metric(logits, y)self.train_scores.append(trn_score)# 自动计算参数梯度trn_loss.backward()if custom_print_log is not None:# 打印每一层的梯度custom_print_log(self)# 参数更新self.optimizer.step()# 清空梯度self.optimizer.zero_grad()dev_score, dev_loss = self.evaluate(dev_set)# 如果当前指标为最优指标,保存该模型if dev_score > best_score:self.save_model(save_path)print(f"[Evaluate] best accuracy performence has been updated: {best_score:.5f} --> {dev_score:.5f}")best_score = dev_scoreif log_epochs and epoch % log_epochs == 0:print(f"[Train] epoch: {epoch}/{num_epochs}, loss: {trn_loss.item()}")# 模型评估阶段,使用'paddle.no_grad()'控制不计算和存储梯度@torch.no_grad()def evaluate(self, data_set):# 将模型切换为评估模式self.model.eval()X, y = data_set# 计算模型输出logits = self.model(X)# 计算损失函数loss = self.loss_fn(logits, y).item()self.dev_loss.append(loss)# 计算评估指标score = self.metric(logits, y)self.dev_scores.append(score)return score, loss# 模型测试阶段,使用'paddle.no_grad()'控制不计算和存储梯度@torch.no_grad()def predict(self, X):# 将模型切换为评估模式self.model.eval()return self.model(X)# 使用'model.state_dict()'获取模型参数,并进行保存def save_model(self, saved_path):torch.save(self.model.state_dict(), saved_path)# 使用'model.set_state_dict'加载模型参数def load_model(self, model_path):state_dict = torch.load(model_path ,weights_only=True)self.model.load_state_dict(state_dict)(3) 模型训练
实例化RunnerV2类,并传入训练配置,代码实现如下:
# 定义训练参数
epoch_num = 1000 # 训练轮数
model_saved_dir = "best_model.pdparams" # 模型保存目录
# 网络参数
input_size = 2 # 输入层维度为2
hidden_size = 5 # 隐藏层维度为5
output_size = 1 # 输出层维度为1
# 定义多层感知机模型
model = Model_MLP_L2_V2(input_size=input_size, hidden_size=hidden_size, output_size=output_size)
# 定义损失函数
loss_fn =F.binary_cross_entropy
# 定义优化器,设置学习率
learning_rate = 0.2
optimizer = torch.optim.SGD(params=model.parameters(),lr=learning_rate)
# 定义评价方法
metric = accuracy
# 实例化RunnerV2_1类,并传入训练配置
runner = RunnerV2_2(model, optimizer, metric, loss_fn)
# 训练模型
runner.train([X_train, y_train], [X_dev, y_dev], num_epochs=epoch_num, log_epochs=50, save_dir=model_saved_dir)输出结果:
[Evaluate] best accuracy performence has been updated: 0.00000 --> 0.48125
[Train] epoch: 0/1000, loss: 0.7482572793960571
[Evaluate] best accuracy performence has been updated: 0.48125 --> 0.50000
[Evaluate] best accuracy performence has been updated: 0.50000 --> 0.53750
[Evaluate] best accuracy performence has been updated: 0.53750 --> 0.60625
[Evaluate] best accuracy performence has been updated: 0.60625 --> 0.71250
[Evaluate] best accuracy performence has been updated: 0.71250 --> 0.73750
[Evaluate] best accuracy performence has been updated: 0.73750 --> 0.77500
[Evaluate] best accuracy performence has been updated: 0.77500 --> 0.78750
[Evaluate] best accuracy performence has been updated: 0.78750 --> 0.79375
[Evaluate] best accuracy performence has been updated: 0.79375 --> 0.80000
[Evaluate] best accuracy performence has been updated: 0.80000 --> 0.81250
[Train] epoch: 50/1000, loss: 0.4034937918186188
[Train] epoch: 100/1000, loss: 0.36812323331832886
[Train] epoch: 150/1000, loss: 0.3453332781791687
[Evaluate] best accuracy performence has been updated: 0.81250 --> 0.81875
[Evaluate] best accuracy performence has been updated: 0.81875 --> 0.82500
[Evaluate] best accuracy performence has been updated: 0.82500 --> 0.83125
[Evaluate] best accuracy performence h相关文章:

【深度学习实验七】 自动梯度计算
目录 一、利用预定义算子重新实现前馈神经网络 (1)使用pytorch的预定义算子来重新实现二分类任务 (2)完善Runner类 (3) 模型训练 (4)性能评价 二、增加一个3个神经元的隐藏层,再次实现二分类,并与1做对比 三、自定义隐藏层层数和每个隐藏层中的神经元个数,尝…...

JAVA毕业设计192—基于Java+Springboot+vue的个人博客管理系统(源代码+数据库+万字论文+开题+任务书)
毕设所有选题: https://blog.csdn.net/2303_76227485/article/details/131104075 基于JavaSpringbootvue的个人博客管理系统(源代码数据库万字论文开题任务书)192 一、系统介绍 本项目前后端分离,分为用户、管理员两种角色,角色菜单可自行…...

must be ‘pom‘ but is ‘jar‘解决思路
这个错误信息表明在 Maven 的 pom.xml 文件中,定义的父 POM 的 packaging 类型设置不正确。具体来说,它应该是 pom 类型,但当前设置为 jar。这个问题通常会导致构建失败。以下是解决这个问题的步骤。 解决步骤 检查父 POM 的 packaging 类型…...

STM32启动文件浅析
目录 STM32启动文件简介启动文件中的一些指令 启动文件代码详解栈空间的开辟堆空间的开辟中断向量表定义(简称:向量表)复位程序对于weak的理解对于_main函数的分析 中断服务程序用户堆栈初始化 系统启动流程 STM32启动文件简介 STM32启动文件…...

h5页面与小程序页面互相跳转
小程序跳转h5页面 一个home页 /pages/home/home 一个含有点击事件的元素:<button type"primary" bind:tap"toWebView">点击跳转h5页面</button>toWebView(){ wx.navigateTo({ url: /pages/webview/webview }) } 一个webView页 /pa…...
:React 合成事件系统)
探索 JavaScript 事件机制(四):React 合成事件系统
前言 在前端开发中,事件处理是不可或缺的一部分。在众多的前端框架中,React 凭借其高效和灵活性受到众多开发者的喜爱。React 的事件处理系统,即“合成事件系统”,是其性能优化的一大亮点。 本文将带你深入浅出地探索 React 的合…...

openlayers 封装加载本地geojson数据 - vue3
Geojson数据是矢量数据,主要是点、线、面数据集合 Geojson数据获取:DataV.GeoAtlas地理小工具系列 实现代码如下: import {ref,toRaw} from vue; import { Vector as VectorLayer } from ol/layer.js; import { Vector as VectorSource } fr…...

手机号码携号转网查询接口-在线手机号码携号转网查询-手机号码携号转网查询API
接口简介:通过手机号精准查询该号码转网前及转网后所归属运营商 可查询号码是否为虚拟手机号 可查询到号码归属地信息 高准确率,实时查询运营商数据库 多用于营销场景,如运营商业务办理、客户信息查询、携号转网、电话营销等 接口地址&#x…...

yolo目标检测和姿态识别和目标追踪
要检测摄像头画面中有多少人,人一排排坐着,像教室那样。由于摄像头高度和角度的原因,有的人会被遮挡。 yolo v5 首先需要下载yolo v5官方代码,可以克隆或下载主分支的代码,或者下载release中发布的。 简单说一下环境…...

Docker搭建开源Web云桌面操作系统Puter和DaedalOS
文章目录 Puter 操作系统说明基于 Docker 启动 Puter 操作系统拉取镜像运行容器基于 Docker-Compose 启动 Puter操作系统创建目录编写docker-compose.yml运行在本地直接运行puter操作系统puter界面截图puter个人使用总结构建自己的Puter镜像daedalos基于web的操作系统说明技术特…...

FAQ-为什么交换机发给服务器的日志显示的时间少8小时
问题描述 配置交换机向日志服务器发送日志,在交换机上面查看日志显示的时间比日志服务器显示的时间快8个小时 解决方案 根据公司全球化整改的要求,syslog默认发送的是UTC时间。 当前设备上配置了时区UTC8,因此,设备上显示的本地…...

[表达式]真假计算
题目描述 有一棵树,不一定是二叉树。 所有叶子节点都是 True 或者 False。 对于从上往下奇数层的非叶子节点是 and,偶数层非叶子节点为 or。 树上每个节点的值是所有孩子节点的值进行该节点的运算操作。 判断一棵树能否砍掉,最快的方法就是从…...

记录一次线上环境svchost.exe antimalware service executable 进程占用CPU过高问题
博主介绍: 大家好,我是想成为Super的Yuperman,互联网宇宙厂经验,17年医疗健康行业的码拉松奔跑者,曾担任技术专家、架构师、研发总监负责和主导多个应用架构。 技术范围: 目前专注java体系,有多…...
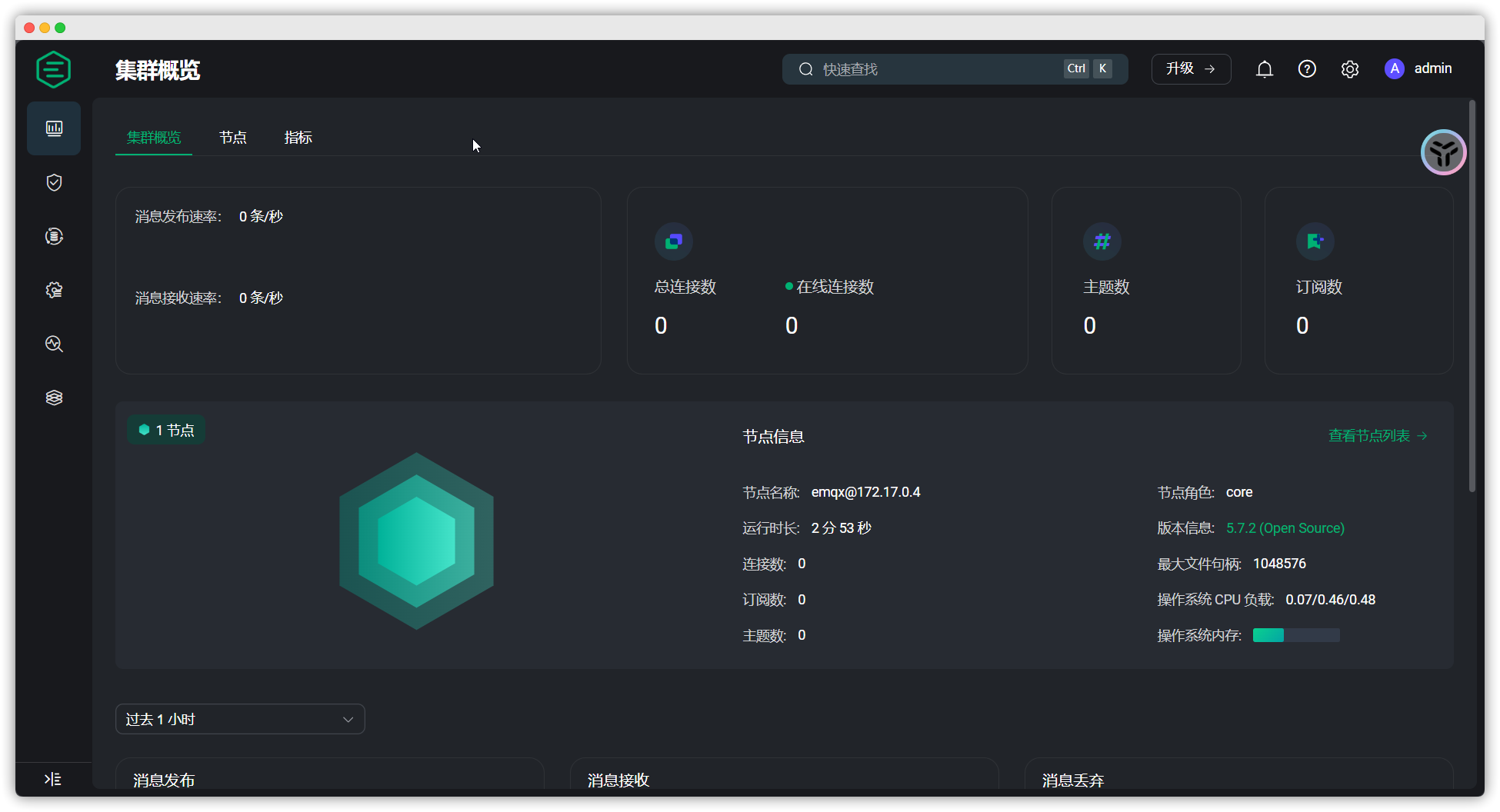
Docker 部署 EMQX 一分钟极速部署
部署 EMQX ( Docker ) [Step 1] : 拉取 EMQX 镜像 docker pull emqx/emqx:latest[Step 2] : 创建目录 ➡️ 创建容器 ➡️ 拷贝文件 ➡️ 授权文件 ➡️ 删除容器 # 创建目录 mkdir -p /data/emqx/{etc,data,log}# 创建容器 docker run -d --name emqx -p 1883:1883 -p 1808…...

STL-常用容器-list
1list基本概念 **功能:**将数据进行链式存储 链表(list)是一种物理存储单元上非连续的存储结构,数据元素的逻辑顺序是通过链表中的指针链接实现的 链表的组成:链表由一系列结点组成 结点的组成:一个是存储…...

Lambda 架构
Lambda架构是一种用于构建可扩展、容错和实时数据处理系统的架构模式。 它由三个主要部分组成:批处理层(Batch Layer)、实时层(Speed Layer)和服务层(Serving Layer)。 Lambda架构旨在结合批处…...
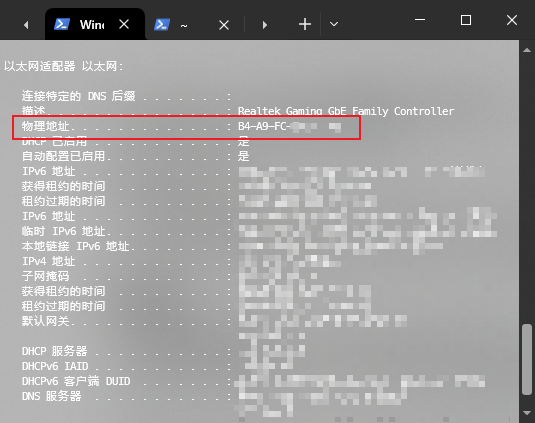
Windows电脑设置网络唤醒(Wake-on-LAN)
1. 启用 Windows 电脑的 Wake-on-LAN 功能 首先,你需要确保你的 Windows 电脑支持并启用了 Wake-on-LAN: BIOS/UEFI 设置(具体看自己电脑主板如何设置): 启动 Windows 电脑,进入 BIOS/UEFI 设置。找到网络适配器相关的设置,启用 …...

前端项目构建流程
1. 需求分析 目标:明确项目目标、核心功能和用户需求。 产品需求讨论: 与产品经理、客户、业务部门讨论项目的需求和目标,理解产品的功能、业务流程以及用户需求。定义用户角色(Persona),明确不同用户的功…...

支持国密算法的数字证书-国密SSL证书详解
在互联网中,数字证书作为标志通讯各方身份信息的数字认证而存在,常见的数字证书大都采用国际算法,比如RSA算法、ECC算法、SHA2算法等。随着我国加强网络安全技术自主可控的大趋势,也出现了支持国密算法的数字证书-国密SSL证书。那…...

【EndNote使用教程】创建文献库、导入文献、文献分类
1、创建文献库 打开“EndNote”,点击“文件”,点击“新建”,选择保存文件路径。 2、导入文献 (1)可以选择导入电脑上的PDF文件,如下图所示。 (2) 也可以选择直接在浏览器网页上面直…...

Allegro 17.4 Via Array 实战:3分钟搞定PCB板边与铺铜区的屏蔽过孔阵列
Allegro 17.4 Via Array高效应用:从板边屏蔽到铺铜优化的实战解析 在高速PCB设计中,过孔阵列的应用早已超越了简单的电气连接功能。资深Layout工程师们发现,合理布置的过孔阵列能够显著提升板边屏蔽效果、优化电源平面阻抗分布,甚…...

5分钟解锁学术付费墙:Unpaywall浏览器扩展让你的研究之路畅通无阻
5分钟解锁学术付费墙:Unpaywall浏览器扩展让你的研究之路畅通无阻 【免费下载链接】unpaywall-extension Firefox/Chrome extension that gives you a link to a free PDF when you view scholarly articles 项目地址: https://gitcode.com/gh_mirrors/un/unpaywa…...

如何通过QuickLookVideo实现Mac视频预览效率革命:终极工具深度解析
如何通过QuickLookVideo实现Mac视频预览效率革命:终极工具深度解析 【免费下载链接】QuickLookVideo This package allows macOS Finder to display thumbnails, static QuickLook previews, cover art and metadata for most types of video files. 项目地址: ht…...

Avogadro 2:解决跨平台化学建模可视化挑战的开源方案
Avogadro 2:解决跨平台化学建模可视化挑战的开源方案 【免费下载链接】avogadroapp Avogadro is an advanced molecular editor designed for cross-platform use in computational chemistry, molecular modeling, bioinformatics, materials science, and related…...

MFAPC实战:如何为你的Arduino或树莓派项目添加智能自适应预测控制?
MFAPC实战:为嵌入式项目打造轻量级智能控制引擎 在创客空间和物联网实验室里,我们常看到这样的场景:一位开发者盯着反复震荡的智能小车摇头叹气,或是面对总也调不准的温室控制系统抓耳挠腮。传统PID控制在这些复杂动态系统中往往…...

解决ubuntu中hermes agent连接taotoken自定义供应商的配置问题
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决 Ubuntu 中 Hermes Agent 连接 Taotoken 自定义供应商的配置问题 如果你在 Ubuntu 系统上使用 Hermes Agent,并希望…...

DriverStore Explorer:Windows驱动存储管理的终极解决方案与实战指南
DriverStore Explorer:Windows驱动存储管理的终极解决方案与实战指南 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer DriverStore Explorer(简称RAPR)…...

pyperclip测试策略:如何确保跨平台剪贴板功能的稳定性
pyperclip测试策略:如何确保跨平台剪贴板功能的稳定性 【免费下载链接】pyperclip Python module for cross-platform clipboard functions. 项目地址: https://gitcode.com/gh_mirrors/py/pyperclip pyperclip是一个强大的Python跨平台剪贴板模块࿰…...

【亲测免费】 TC8协议一致性测试文档
TC8协议一致性测试文档 【下载地址】TC8协议一致性测试文档 本仓库提供了一个重要的资源文件,即**TC8协议一致性测试文档**。该文档详细描述了汽车以太网ECU(电子控制单元)在不同网络层的一致性测试规范。具体包括以下三个部分:1.…...

3分钟掌握:ncmdumpGUI免费转换网易云音乐ncm文件的完整指南
3分钟掌握:ncmdumpGUI免费转换网易云音乐ncm文件的完整指南 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经从网易云音乐下载了心爱的歌…...